数字空间站动力学与控制仿真建模与飞控应用
2021-11-10孙乐丰罗文成
邢 涛, 孙乐丰, 王 为, 罗文成
1. 中国空间技术研究院总体设计部, 北京 100094
2. 南京航空航天大学, 南京 210000
0 引 言
自1998年11月第一个模块发射升空,国际空间站(ISS)已成功在轨运行20余年,在轨运行管理积累了丰富经验,将数字化仿真技术、人工智能技术在健康管理、任务规划与调度、任务操作和人机交互过程等领域开展应用,针对噪声控制、热环境分析等专业开展了在轨运行任务仿真验证[1].国际空间站机械臂SSRMS由加拿大研制,在地面测试和试验数据及在轨飞行试验数据的基础上,建立了机械臂数字仿真模型,地面依靠机械臂数字仿真模型完成国际空间站机械臂任务分析与验证.
我国空间站核心舱于2021年4月29日发射升空并稳定运行,中国空间站组装建造拉开序幕.中国空间站由核心舱、实验舱I、实验舱II三个舱段及载人飞船、货运飞船组成组合体,是我国规模最庞大系统最复杂的超大型航天器系统.空间站在轨演化构型繁多,能源、信息、载人环境控制、热管理、姿轨控、推进、机械臂等系统工作模式复杂.空间站在轨运行时间长达十年以上,运行期间长期有人在轨照料,飞控操作任务复杂.空间站任务复杂性一方面为空间站研制验证全面性带来挑战,另一方面也为后续空间站在轨运行控制提出了高要求.
面向空间站长期稳定可靠在轨运行要求,在充分利用空间站数字化智能化建设成果的基础上,依据基于模型的系统工程(model based system engineering, MBSE)思想,开展了数字空间站建设与应用,构建多学科集成的数字空间站仿真模型,实现对空间站能源、环热控、信息、姿轨控、有效载荷支持、机械臂等任务的监视、动态评估、动态管理,将数字空间站应用于空间站飞控,为空间站飞控任务提供有效支撑和技术保障.
1 数字空间站组成
1.1 数字空间站概述
在空间站研制阶段,采用MBSE思想,在中国空间技术研究院航天器数字化研制流程下开展数字空间站建设,采取边建设边应用的模式,实现型号需求促数字化建设,数字化建设促空间站研制质量与效率提升的目标,确保空间站系统设计正确.
数字空间站建设遵循系统工程V字形过程,经历了模型需求分析、系统设计、详细设计、生产制造与软件开发、系统集成、测试验证、运行支持等7个步骤.
基于需求分析,数字空间站以基于功能模型的多学科仿真系统为核心,与产品信息查询系统、三维场景构建与分析系统、在轨遥测信息接口等有机集成.
多学科仿真系统实现对空间站能源、环热控、信息、姿轨控、推进等各专业领域实物产品的精细化建模和多学科集成仿真,能反映各个空间站专业领域之间的耦合.三维场景构建与分析系统是对产品三维构型、电缆管路三维布局等信息的综合集成应用,支持开展全三维仿真场景演示、几何干涉分析、视场仿真分析等工作.产品信息查询系统对空间站各功能指标信息、IDS接口信息、产品数据包等产品研制信息进行综合管理,实现面向在轨运行的研制信息快速查询分析.在轨遥测信息接口软件实现实时遥测、空间站在轨信息管控,支持空间站在轨状态监视、空间站在轨数据统计分析、平台健康状态评估、设备寿命预测等工作.
数字空间站是空间站研制数据、系统状态数据的综合集成.数字空间站作为真实空间站的数字化映像,为研制和在轨实时任务评估与规划、故障快速处置、载荷资源综合调配等全周期工作提供支持,具体任务包括:研制阶段,数字空间站支持通过数字化仿真对系统设计和系统工作模式进行综合验证;飞行任务前开展系统仿真和系统状态预示;飞行任务中开展空间站状态监视、实时数字伴飞、在轨故障定位和故障预案验证,飞行任务后评估任务效能.

图1 数字空间站研制模式
1.2 多学科仿真系统
空间站属于高度复杂系统,能源、环热控、信息、动力学与控制等各专业领域相互耦合,如航天员出舱任务中机械臂运动与姿态控制耦合,也将导致能源系统帆板发电变化、环热控系统外热流及整舱散热能力变化、控制系统CMG角动量积累、机械臂根部受力变化.单科学仿真难以模拟真实的仿真边界条件和学科间耦合影响,开展多学科综合集成仿真验证,可以解决多学科耦合问题.
基于功能模型的空间站多学科仿真系统是数字空间站的核心,采用Modelica建模语言为主,结合C语言建模等其他建模方式设计开发,从系统、分系统、单机设备级等3个层级,建立能源、环热控、信息、动力学与控制等专业功能层面的数字功能样机模型,并以数字功能样机模型为基础,建立数字空间站多学科仿真系统.
采用数字化技术[2-3],数字功能样机模型与空间站真实产品状态一致,同步更新.4个专业功能层面的仿真模型是相互关联的有机整体,既可开展各专业的独立仿真验证,也可开展多学科集成的综合仿真验证.
数字空间站基于Modelica建模语言和C语言建模开发,在MWorks软件环境下进行集成与仿真应用.Modelica是面向对象、基于方程、采用层次化组件模型和具有可重用性的物理建模语言,支持多领域物理系统,提供连续域和离散域混合建模功能,并可适用于半物理仿真和嵌入式控制系统[4-5].
数字空间站多学科仿真系统采取边建设边应用的技术路线,建立核心舱正常模型建模,包括能源系统仿真模型、环热控系统仿真模型、信息系统仿真模型、动力学与控制仿真模型.然后将能源、环热控、动力学与控制、信息等专业层面模型进行综合集成,建立各专业模型间的数据交互关系,如能源系统发电能力及能量平衡仿真与动力学与控制系统轨道姿态、飞行程序有数据交互,环热控系统整舱散热能力仿真根据飞行姿态和轨道实时计算.
数字空间站多学科仿真系统基于真实发射窗口、入轨轨道参数,按在轨飞行程序驱动开展空间站任务多学科综合仿真,并驱动三维场景构建与分析系统进行空间站综合仿真场景展示.多学科仿真系统模型示意如图3所示.
2 数字空间站动力学与控制建模
动力学与控制仿真模型实现轨道仿真、姿态轨道控制仿真、机械臂运动仿真.
2.1 动力学与控制仿真模型构成
动力学与控制仿真模型包含姿态敏感器模型、姿态动力学及控制仿真、柔性动力学仿真模型、机械臂运动学与动力学仿真模型、轨道仿真模型、环境力矩仿真模型等:
1)测量敏感器,如地球敏感器、太阳敏感器、星敏感器、惯导组件等,重点对其测量过程进行数学建模;
2)执行机构,如发动机、控制力矩陀螺、太阳翼驱动机构、推力器等,对其控制执行过程进行数学建模,并在功能子模型中考虑机电类设备的机电耦合关系;
3)控制器,如GNC控制器,对其控制律进行数学建模;
4)活动部件,例如太阳翼、机械臂、转位机构,对其运动特征进行数学建模;
5)外部环境,如轨道、干扰力矩等,集成已有高精度模型;
6)柔性部件,例如柔性太阳翼、机械臂、转位机构等,集成已有高精度模型;
7)舱体,主要建立舱体动力学模型.
通过对各设备及部件功能分析,GNC敏感器、执行机构、控制器等设备模型采用C语言建立,基于FMI接口标准进行封装集成;外部环境模型、活动部件模型、舱体动力学模型、机械臂动力学模型等采用Modelica语言建模.
2.2 姿态轨道控制仿真建模
空间站姿态轨道控制仿真模型是基于C++语言开发,集成了敏感器、执行机构、控制器模型及姿态轨道控制算法,功能及接口复杂,无法直接使用Modelica进行集成仿真,采用FMI接口标准[1-2]通过模型规范-模型封装-模型测试-模型管理-模型应用-模型重用等方面规范化开展GNC仿真模型的系统建模工作,然后再与其他基于Modelica语言建立的模型进行集成仿真,实现仿真工具之间的交互仿真,实现数字空间站的数学仿真、半物理实时仿真、超实时仿真等不同场景应用.
基于FMI接口标准,空间站GNC仿真模型的封装分为动态链接库DLL封装、FMU文件发布、FMU导入应用3个步骤.
2.2.1 动态链接库封装
FMI 标准化接口包括联合仿真函数和状态信息两个部分.联合仿真函数分控制器函数、子系统执行函数、子系统状态函数;联合仿真状态共有控制器执行信息、子系统执行信息、子系统状态信息三类.仿真控制器函数包括实例化函数、初始化函数、终止函数、重置系统函数、释放实例函数;子系统执行函数包括仿真执行函数、仿真中断函数、输入参数设置函数、输出参数获取函数[4-7].
基于FMI接口的GNC模型封装过程如图4所示.

图4 GNC仿真模型动态链接库封装流程
2.2.2 FMU文件发布
FMU文件包含模型描述xml文件、模型接口实现等,模型接口实现为源文件形式或二进制文件形式,存储在zip压缩文件中,结构形式如下:
modelDescription.xml∥描述模型 (必须)
model.png∥模型图标(可选)
documentation∥包含模型文档的文件夹(可选)
_main.html∥文档入口
<其他文件>
sources∥包含C源代码的接口实现文件夹(可选)
∥编译和连接模型所需的C源代码和C头文件
binaries∥包含二进制文件的接口实现文件夹(可选)
win32∥32位Windows平台二进制文件(可选)
∥特定编译器所需的库文件(可选)
VisualStudio8∥Microsoft Visual Studio 8 (2005)
gcc3.1∥gcc 3.1.
…
win64∥64位Windows平台二进制文件(可选)
…
linux32∥32位Linux平台二进制文件(可选)
…
linux64∥64位Linux平台二进制文件(可选)
…
resources∥模型所需的资源(可选)
<模型初始化时需读取的数据文件>
FMI API定义存取联合仿真从属软件的输入输出数据和状态信息的C语言接口函数,用于FMU实例的创建、销毁,模型的初始化,模型数据的交换和状态信息的获取等.FMI模型描述XML保存模型的变量属性(如变量名、单位)等静态数据.
2.2.3 FMU导入应用
利用MWorks软件实现FMU模型的导入,在MWorks仿真软件中实现对FMU模型的调用和求解,其主要包括两个方面:模型描述文件XML文件解析及模型动态链接库DLL调用.
GNC仿真模式导入至MWorks软件平台后如图5所示.

图5 封装完成后的GNC仿真模型
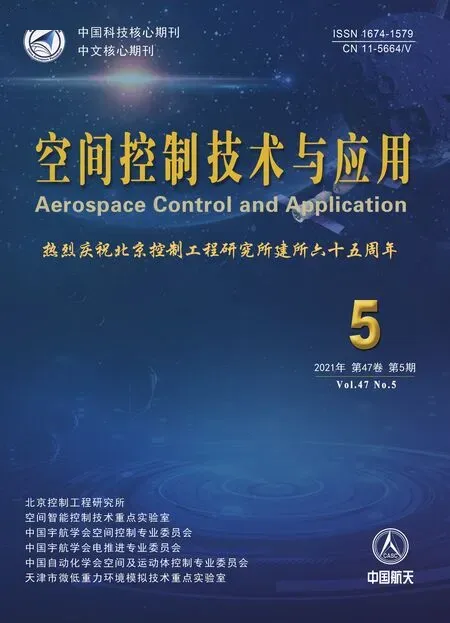
2.3 动力学模型建模
基于Modelica语言构建核心舱、实验舱I、实验舱II、载人飞船、货运飞船舱体动力学模型,并通过不同飞行器的舱体动力学模型的灵活组装构建不同空间站组合体构型下的舱体动力学模型.建立了各舱段的发动机推力模型,并按发动机在舱体上的实际安装关系与舱体动力学模型进行集成.
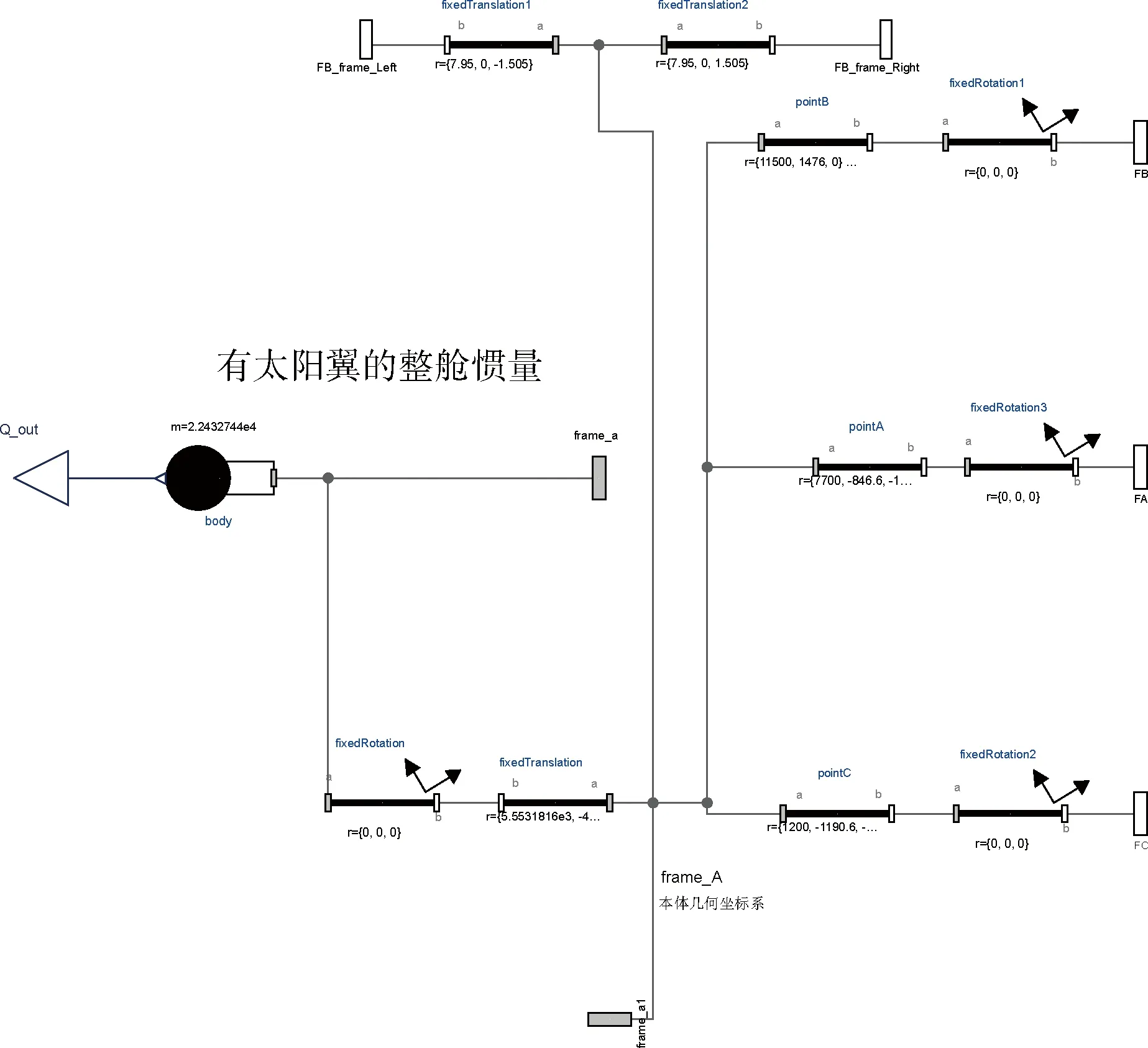
图6 舱体动力学模型
利用Mwork柔性动力学模型库,导入柔性太阳翼模态中性文件,开展柔性太阳翼动力学建模工作.
基于Modelica语言建立机械臂动力学模型,基于路径规划数据驱动进行机械臂动力学仿真,并将机械臂动力学模型与舱体动力学模型进行集成.

图7 机械臂动力学模型
2.4 动力学与控制异构模型集成
将基于FMI接口标准的GNC仿真模型、基于Modelica语言建立的舱体动力学模型、机械臂动力学模型、柔性太阳翼模型、轨道模型、气动力矩分析模型等在MWorks软件平台中导入和加载,按系统集成接口的输入输出关系进行拖拽连线式集成,见图8.
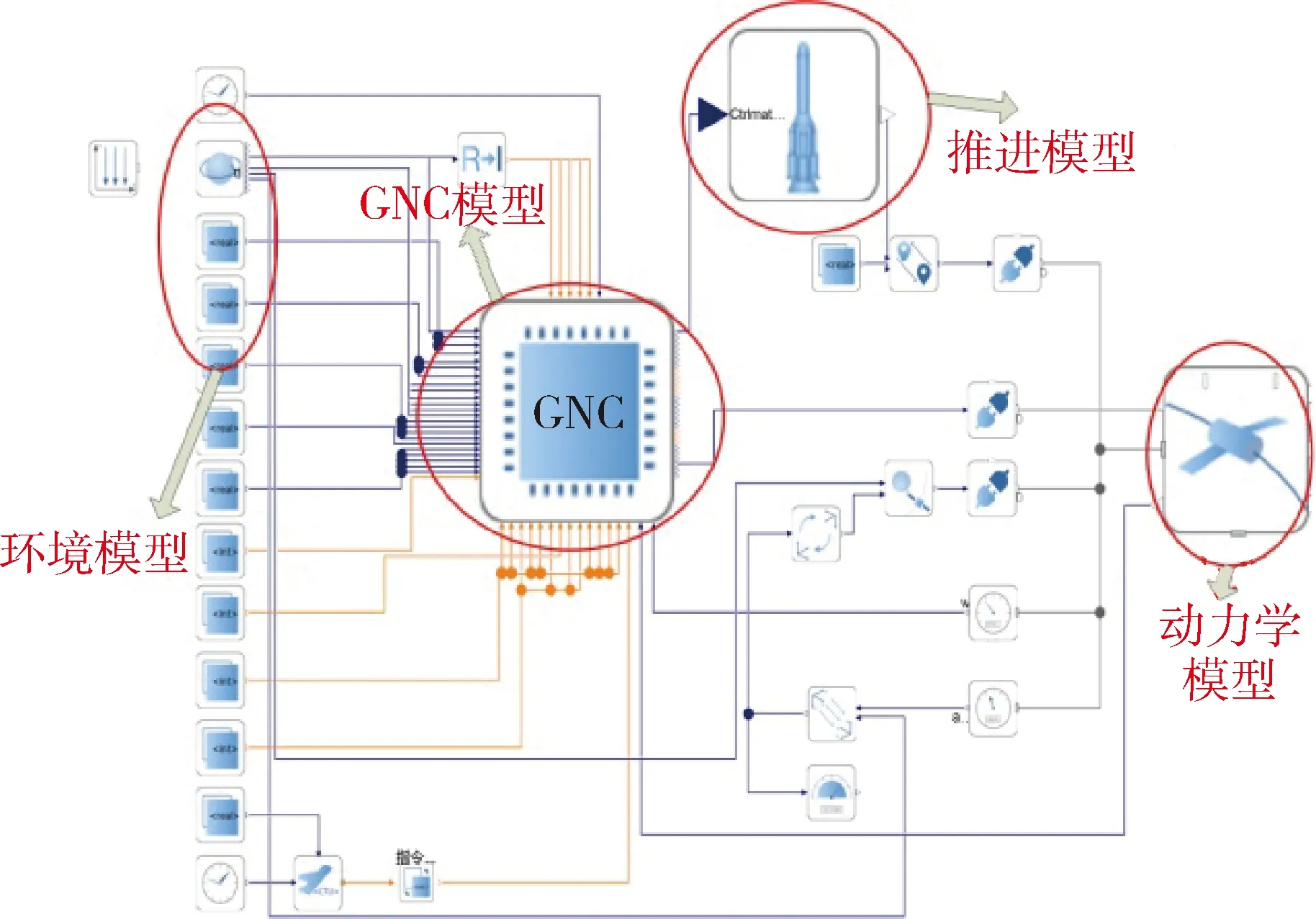
图8 动力学与控制系统集成模型
3 数字空间站应用
3.1 巡检任务动力学与控制仿真
在机械臂巡检任务过程中,核心舱姿态由CMG控制,太阳翼停止转动,发动机禁止喷气.任务前利用数字空间站开展了机械臂巡检任务过程中动力学与控制综合仿真,综合判断机械臂运动对姿态控制、CMG角动量、能源平衡、敏感器视场、天线视场的影响,为飞控任务实施提供决策支持.
(1)仿真工况设置
机械臂从适配器HB爬行至适配器HA并以HA为固定端巡检.
核心舱姿态:惯性飞行姿态
推力器:无喷气
(2)姿态及角动量仿真值与遥测值比对
姿态仿真预示曲线与实际遥测曲线见图9,结果表明,姿态角预示仿真结果与遥测偏差较小,趋势基本一致.
图9 舱体姿态仿真值与遥测值比对(蓝:遥测,红:仿真)
CMG角动量仿真预示曲线与实际遥测曲线见图10,可以看出,机械臂运动期间短时间内CMG角动量发生变化,角动量仿真预示趋势与遥测值基本一致,数值比较接近.

图10 CMG角动量仿真值与遥测值比对(蓝:遥测,红:仿真)
3.2 出舱任务动力学与控制仿真
在航天员出舱任务过程中,机械臂支持航天员运动,核心舱姿态由CMG控制,太阳翼停止转动,发动机禁止喷气.任务前利用数字空间站开展了航天员出舱任务全过程动力学与控制综合仿真预示,综合分析机械臂支持航天员出舱活动对姿态控制、CMG角动量、能源平衡、敏感器视场、天线视场、机械臂运动速度、机械臂根部受力的影响,为任务实施提供支持.
(1)仿真工况设置
核心舱飞行姿态为三轴稳定姿态.机械臂以适配器HA为固定端支持航天员出舱活动.推力器不工作.
(2)CMG角动量仿真值与遥测值比对
出舱活动期间CMG角动量仿真预示曲线与实际遥测曲线见图11,可以看出,航天员出舱活动期间CMG角动量周期性波动,角动量仿真预示趋势与遥测值基本一致,数值基本相当,数字空间站模型可以为飞控提供支撑,后续需结合飞行任务进行模型校核.
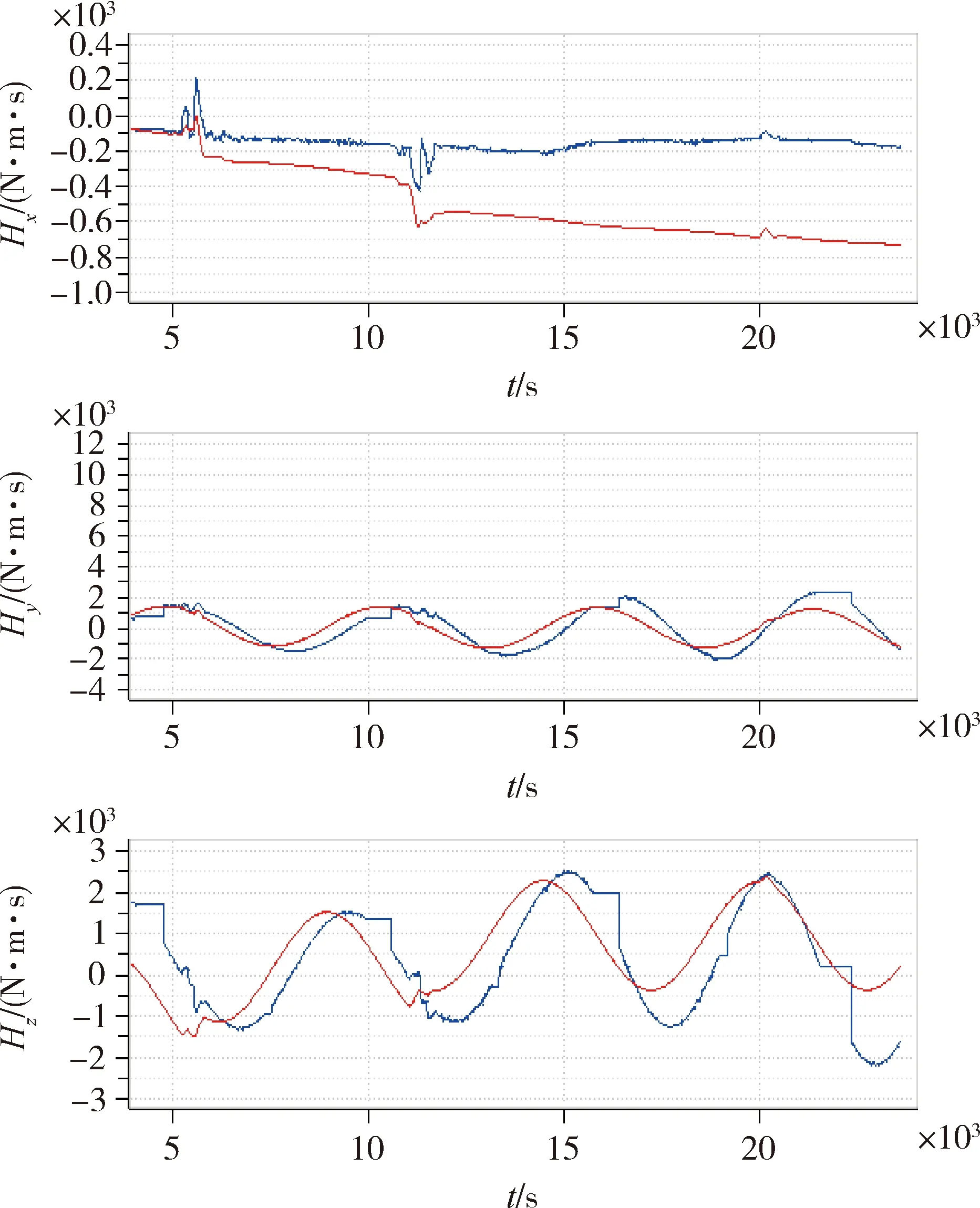
图11 CMG角动量仿真值与遥测值比对(蓝:遥测,红:仿真)
4 结 论
面向空间站长期在轨飞行控制需求,采取MBSE思想进行了数字空间站建设.数字空间站按边建设边应用的思路开发建设,数字空间站在核心舱飞控过程中得到了全面应用和验证,动力学与控制仿真模型已用于平台在轨测试、机械臂任务、出舱活动任务等飞控工作,验证了建模方法的正确性,可以有效支持空间站飞控.