跨座式单轨曲线PC轨道梁线形控制技术
2021-11-09黄红林秦环兵
黄红林,秦环兵
(中铁大桥局集团第二工程有限公司,江苏 南京 210015)
0 引 言
在跨座式单轨交通中,PC轨道梁既是列车行驶轨道、系统设备通道,同时也是承受列车荷载的承重结构[1],列车通过橡胶轮胎环抱梁体进行行驶,以保持行驶的稳定性。
芜湖轨道交通1号线、2号线一期工程,采用跨座式单轨列车,是庞巴迪单轨技术在国内的首次应用,它以大跨度连续刚构形式取代大部分简支体系,填补了国内大跨度连续刚构轨道梁建设的空白。
1 梁体线形控制的难度
PC轨道梁作为列车荷载的承重结构,其线性控制的难度有:① 平、竖曲线以及横向超高均由轨道梁自身实现,要求一次浇筑成型;②梁型多样、线形多变。每榀梁长度、高度、端部倾角、顶部超高等技术指标均不相同,需要制作专门的工法指导书;③ 线形精度要求高,轨道梁顶面和侧面平顺性要求达到3 mm/4 m;④ 曲线梁预制采用直钢模板拼装,给梁体线形过程控制带来极大的难度;⑤与传统的预制梁比较,曲线梁体线形控制没有成熟的经验可借鉴。
2 控制网布设
梁场测量控制网分为2级,首级控制网为边角加密网,次级控制网为制梁台座方格网。
2.1 首级控制网
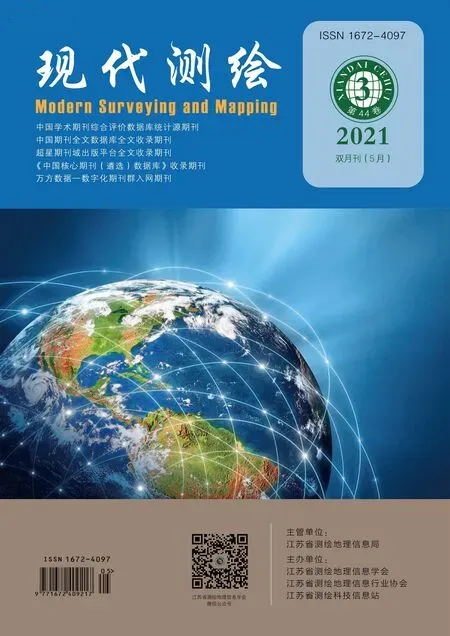
首级控制网采用测量塔的形式布设[2],共10个点。根据制梁场地形,布置于制梁区四周,按大地四边形布点(图1),测点采用强制对中基座(图2),以消除仪器及棱镜的对中误差。首级网作用是对台车轨道、制梁台座轨道,存梁台座沉降及临建设施进行控制,同时对次级方格网起到检查和复核作用。
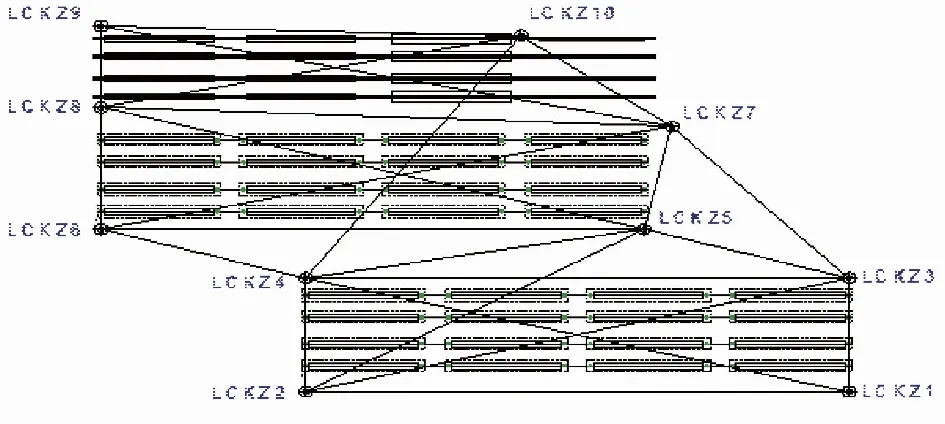
图1 首级控制网点分布图

图2 测量塔示意图
因为梁体控制精度要求高,而控制网边长较短(平均边长130 m),首级网不宜用GNSS测量,而采用带有自动照准功能的测量机器人(0.5"/0.6+1×10-6),按照规范[3]以三等边角网的要求测量。网平差后最弱边长相对中误差为1/95 000,测角中误差1.4",满足了规范要求。
2.2 次级控制网(方格网)
次级控制网由首级网加密而成,是由制梁台座的轴线及平移一定距离后的测量控制线组成的矩形方格网(图3),其作用是对梁体底模放线,底模拼装、底模检查、梁体竣工检查等工序进行测量控制,保证预制梁体的线形精度,控制线也可起到复核检测制梁中轴线及台座变形的作用。此外,在施工过程中当中轴线点被破坏时,可以根据网格点的相对关系及时恢复。次级控制点与首级控制点应定期进行复测,及时更新测量成果。

图3 梁场区方格网图
2.3 高程控制网
水准点布设遵循与平面点共用原则,按二等水准施测。作用是对台车轨道、制梁台座轨道,移动(固定)侧模、制梁台座、存梁台座及大型临时设施进行沉降观测。
3 曲线梁预制线形控制
曲线轨道梁测量工作贯穿于轨道梁制作的各个阶段,主要包括台座模板放线与调整、支座定位、侧模及端模检查与线形条调整、沉降及变形监测、梁体张拉前后挠度监测、梁体竣工测量等几个阶段。
3.1 工艺原理及流程
根据不同梁型的工法指导书,分别计算出曲线轨道梁各截面的长度、宽度、高度、横纵倾角、横纵坡率、垂直度、顺直度等线形参数,在工厂化生产,流水线作业模式下[4],配置可移动底模检查卡尺、支座精准定位器、链条式横向读数装置、可移动竣工检查小车等专用工装设备,测量工艺如下:
(1)施工准备(编制轨道梁施工测量专项方案、轨道梁线形参数计算复核、技术交底)→(2)控制网布设→(3)台座(底模)检查并调整→(4)支座精确定位→(5)侧模及端模检查并调整→(6)线形条检查并调整→(7)台座沉降及梁体挠度观测→(8)竣工检测(线形参数、挠度)→(9)初张拉前后、终张拉前后挠度观测→(10)梁体竣工测量。
3.2 台座底模放线与调整
测量内容包括台座模板中线及高程的调整,梁体端面底边线、支座中心位置等(图4)。
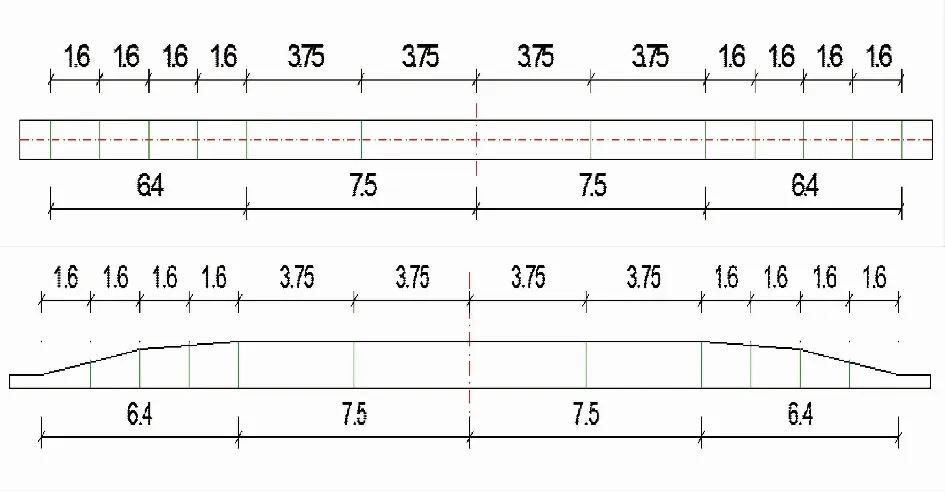
图4 台座底模分块示意图(单位/m)
曲线轨道梁中线沿纵向是平曲线,曲线台座模板中线调整实质就是底模圆顺度的调整。调整时首先将全站仪架在方格网点上,分别后视台座底模两端部中点,将此两点的连线作为参考线,在台座底模上放样出模板纵向中线和两侧边线,将移动式底模检查卡尺安装在中线上,以模板纵向中线的中点为里程零点,将移动式底模检查卡尺依次推到各小块段模板接缝处,利用曲线横向偏距差对每块段模板进行圆顺度调整。
高程调整时,将水准仪架设在底模侧任意一处,借助1 m钢直尺,以梁体模板跨中点为高程零点,利用相对高差对每块段模板进行高程及平整度的调整。
中线及高程检查合格后,以台座模板纵向中线为基准线,由中心向两侧对称放样,在台座两端分别放样出梁体端部底边线、支座中心十字线等,并用墨线弹出做好标记。
3.3 支座定位
支座定位调整应用支座调节工装进行调节。首先在台座辅助框架上放样支座十字线,然后根据支座调节工装使支座纵横向中心线与理论中心线重合。用水准仪检查支座顶面与台座顶面的高差,将支座调平。
3.4 侧模及端模调整
侧面模板调整包括侧面垂直度、顶面线形、顶面梁宽与中线偏差3个方面。
首先在模板框架的固定端的正面,每隔1 m一个断面,分别对应模板顶口与底口高度处安装链条式自动伸缩读数装置,安装时必须确保各断面上的读数装置的底座都在一条直线上。以此作为基准,通过模板各断面外矢距及垂直度较差值计算各断面的上下顶底口处横向偏差,通过液压装置使模板作横向移动,测出模板各断面横向偏距,与理论偏距比较进行调整,直至各断面处的横向偏距与设计值一致。另外一侧的模板线形调整方法同上。
当两侧模板都调整到位后,可通过量取模板顶面宽度来复核该榀曲线梁的线形精度。
端模的安装精度对曲线梁长有较大影响。按设计要求梁端模需形成3个面的转角:一是端模竖直面需与梁顶面的纵向曲线垂直,二是端模竖直面需与梁顶面的横向曲线垂直,三是端模竖直面需与梁顶超高面垂直。首先调节底端左右两根拉杆,使端模底部内边线与台座上的梁底端边线重合,然后分别在端模顶部的左、右、侧面3处将防风的线坠吸在端模顶部,通过端模顶部与底部的理论相对较差值,调节顶端左右两根拉杆,使端模倾角、转角和端模底部边线,梁体中心线夹角符合设计要求。
3.5 线形条调整
模板顶面线形关系到曲线梁顶面的平顺性,影响着列车行驶的平稳性,其调整依据是设计纵断面坡度及横向超高参数。将水准仪固定在模板顶面钢架上,调整模板调节丝杆,使梁体跨中处梁高与设计符合。依据该榀梁工法指导书中设置的梁体反拱值,以已调节好的跨中截面处的线形板台面高度为基准,调整其他断面处的竖曲线调节丝杆,使各截面处线形板台面与跨中截面处的线型板台面高差,与设计值符合。调整好的线形条用螺栓固定在侧模顶口,作为梁体砼的收面基准。
4 成品梁线形观测
4.1 台座沉降观测
为防止制梁台座在制梁过程中发生非弹性形变、保证存梁台座在存梁期间的安全稳定性,需要定期对制梁、存梁台座进行沉降观测(图5)。
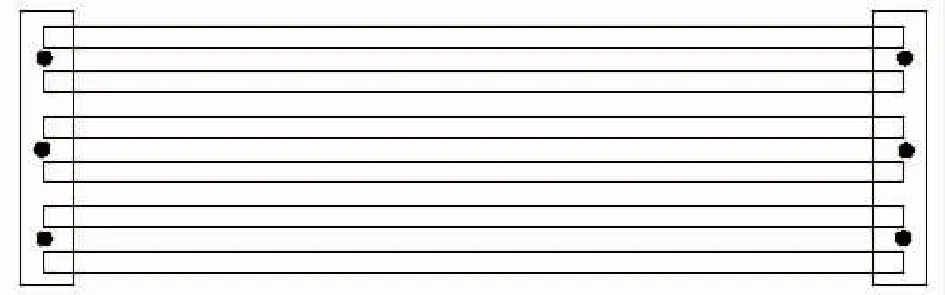
图5 存梁台座观测点布置图
沉降观测时按照仪器固定、观测人员固定、观测路线和方法、工作基点固定的“四固定”原则进行,精度等级为二等水准,往返测形成附合路线[5]。
观测频次:制梁台座在每榀梁浇筑前后进行观测;存梁台座在存梁后立即进行,若无明显沉降可按第3 d、5 d、7 d、15 d、30 d逐渐延长观测周期。当存梁台座累计沉降量大于20 mm时,需及时调整台座存梁数量,采取加固措施,避免引起梁体结构的损伤。
4.2 梁体挠度观测
梁体挠度是指观测梁体顶面在张拉前后的高差变化,目的是修正设计参数,验证设计数据与梁体张拉前后起拱变化是否对应。挠度观测只测量梁顶各点的相对高差。外业观测按国家二等水准要求进行,往返测形成闭合路线(图6)。仪器第一站观测1~2点间高差,第二站观测2~3点间高差,取往返观测的平均值进行比较。
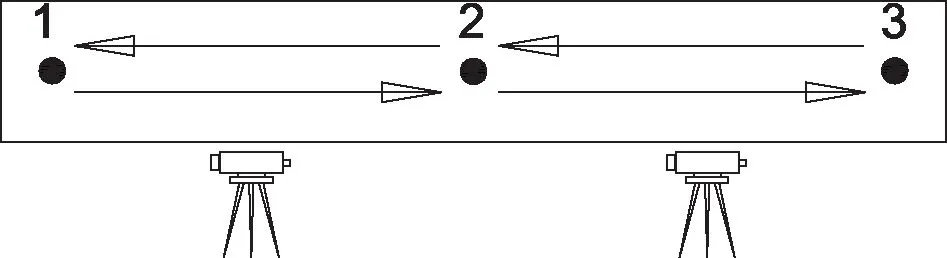
图6 轨道梁挠度观测顺序示意图
梁体挠度观测频率为:脱模后初张拉前、初张拉后(4 d)、终张拉前(14 d)、终张拉后(14 d)、28 d、60 d、出场前(104 d)。
5 梁体竣工检测
按照工法指导书要求,应对成品梁进行张拉前后、脱模28 d、60 d进行竣工测量。梁体竣工测量采用轨道梁检测小车和全站仪扫描的方式结合进行,前者可测出跨度、工作面线形、走行面垂直度、局部不平度等线性参数,后者可测出任意高度和断面的梁长、梁宽、梁高、端面倾斜度、夹角等参数。竣工测量内容及要求如表1所示[6]。

表1 PC轨道梁的梁体精度要求
5.1 轨道梁检测小车
移动式+固定式曲线轨道梁线形检测小车,其原理是固定标架不动,全站仪测量移动标架上各断面特征点的坐标(图7),利用专业软件画出梁体三维图,计算出梁体各断面的竣工偏差。

图7 轨道梁检测小车进行竣工测量
检测前,将两固定标架安装在梁顶面上,位置与两端设计支座中心分别对应,然后将活动标架安装在待检断面上,固定标架与活动标架间用联动细钢丝绳连接。全站仪架设在一侧梁端,后视两固定标架上的棱镜,建立梁体基准线,依次测出各断面上移动标架特征点的数据。用相同方法测量梁体另外一侧数据,完成梁体所有断面的数据采集工作。内业处理时将全站仪所测数据导入专业软件中,得到梁体各断面竣工成果表。
5.2 三维激光扫描技术
莱卡MS60全站扫描仪,拥有0.5"的ATR测角精度,具有1 000点/s的扫描速度和0.6 mm的扫描精度[7]。因此,使用该仪器对梁体进行扫描检测在精度和作业效率上都能满足要求。
检测时,将全站扫描仪置于空旷地带超过梁体高度的平台上,仪器设站于梁跨中位置,后视2至3个固定点进行后方交会,建立梁体独立坐标系统;随后进入扫描程序,分别设置点云名称、扫描范围、扫描间隔、扫描速度等参数;点击开始扫描,对梁体顶面、一侧侧面和梁端进行点云数据采集;随后将仪器设站于梁体另一侧面,后视同样的固定点进行后方交会,对梁体另一侧面和梁端进行点云数据采集,两组数据自动放在一起,避免了拼接造成的精度损失。
将梁体扫描点云数据导入专业软件中,进行去噪处理,将去噪后的点云数据及梁体模型文件导入3DReshaper软件,完成点云和模型的匹配,导出梁体各断面的线性偏差成果。
6 结 语
跨座式单轨曲线PC轨道梁线形控制技术在国内应用较少,没有成熟的经验可以借鉴,该技术在项目应用过程中采用了许多新方法、新设备和新工装,比如可移动底模检查卡尺、支座精准定位器、链条式横向读数装置、轨道梁检测小车、三维激光扫描技术等,部分工装设备还获得了专利证书。通过对已经完成的400多榀成品曲线梁进行竣工检测,合格率为100%,达到了预期的效果。使用该技术还有效缩短了施工工期,提高了测量效率,对于同类型工程建设具有重要的指导和借鉴意义。