影响无人机航测高程精度因素的研究
2021-11-09张效锋
张效锋
(安徽省水利水电勘测设计研究总院有限公司,安徽 合肥 230022)
0 引 言
100多年历史的航空摄影测量和50多年历史的航天摄影测量,构成了传统的航空、航天摄影测量技术体系,传统航空摄影测量虽然可以满足大比例尺成图的精度要求,却无法满足小区域的成本核算,而传统的航天摄影测量则刚好相反,高分辨率商业卫星虽然在小区域的成本核算上可以被接受,但只能满足成图比例尺小于1∶5 000的精度要求。为实现摄影测量单位按需要组织飞行的目标,无人机航空摄影技术备受青睐,无人机航测技术是集成低空航空摄影技术、传感器技术和数据处理技术等多项技术于一体的航空摄影测量技术,是在卫星遥感、大飞机遥感等技术之后新兴发展的一项航空遥感技术[1-4]。无人机航测在广泛应用时,数据精度是必须考虑的指标。无人机航测数据精度受到许多因素的影响,一般航测的平面精度基本都能解决,主要是高程精度,本文概述了无人机航测系统组成和数据生产流程[5],并逐一分析了对数据高程精度产生影响的因素,提出了相应的提高航测高程精度的建议。
1 无人机航测系统与生产流程
1.1 航测系统组成及工作模式
无人机航测系统由无人机飞行平台、飞行控制系统、航空摄影设备、数传系统、图传系统、电台、地面工作站等系统组成。目前无人机使用的定位技术主要有RTK模式和PPK模式,RTK模式主要是给飞控提供实时的高精度的位置速度等信息,可完全达到免像控要求,这个对电台的刷新频率要求较高;PPK模式主要称为动态后处理技术,与航测联系更加紧密,需进行像控点测量。PPK与RTK的最大区别在于差分模式,本文主要是基于RTK免像控模式下对航测高程精度影响因子的探讨。
1.2 航测数据生产流程
无人机航测内外业作业流程主要包括外业查勘、航线规划、空域申请、外业航飞(PPK模式下需进行像控点采集)、数据下载(主要包括POS数据下载以及相机数据下载)、内业数据处理、成果输出、精度检查等步骤,主要内业技术路线如图1所示。
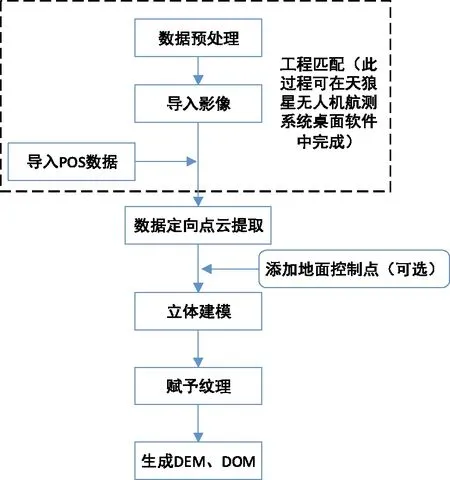
图1 内业数据处理技术路线
结合数据处理流程可提炼出影像数据处理过程中不同精度影响因子所起的作用,结合实验数据来分析各影响因子对无人机航测高程精度的影响程度。
2 航测高程精度影响因素
2.1 像片质量对航测高程精度的影响
无人机航测内业数据处理过程中涉及重要一项就是照片匹配(同名点匹配),同一航带或相邻航带同名点覆盖照片越多,匹配精度就越高,这对于无人机获取像片的质量要求较高。因此,无人机航测精度检查中的重要一项就是像片质量检查,像片质量要求一般需要满足影像清晰,不应有云、云影、烟、大面积反光、污点等缺陷,本次主要研究像片有少量云雾对精度的影响程度,图2为安徽皖北地区飞行了某一区域不同天气下的两个架次。

图2 同一区域两种环境下影像
对同一区域利用RTK固定解方式采集了一定的检查点,对高程精度进行了分析,分析结果如表1所示。
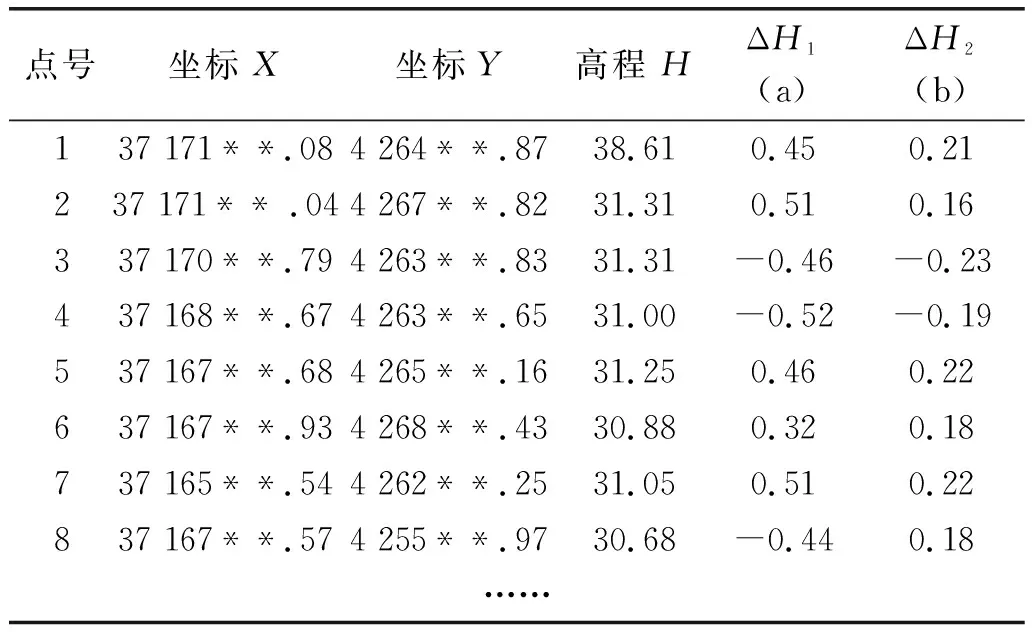
表1 精度统计表
上表显示中,ΔH1(a)代表有雾的影像获取的高程精度,ΔH2(b)代表清晰的影像获取的高程精度。通过精度对比,被云雾遮挡的影像高程精度明显低于清晰影像,通过实验数据分析云雾遮挡较大的区域同名点数量较少,会影响照片匹配精度,从而影响最终数据成果。
2.2 重叠度对航测高程精度的影响
影像立体建模的一项重要步骤就是相对定向,而相对定向直接与像片重叠度有直接关联,影像的重叠度越大,自动匹配就容易,匹配点就越多,相对定向的精度也就越好。通过理论分析判断重叠度会直接影响航测精度,需通过实验分析判断重叠度对高程精度影响的程度。本次针对安徽省宣城市某灌区项目进行无人机航测,采用Fuji-X-M1-18 mm,1 600万像素的相机,分辨率设置为10 cm,选取其中一段面积约0.5 km2的区域(平原地区)进行航测,采用两种不同的重叠度对同一区域进行航摄(图3),其中蓝色代表重叠照片达到9张以上的区域。
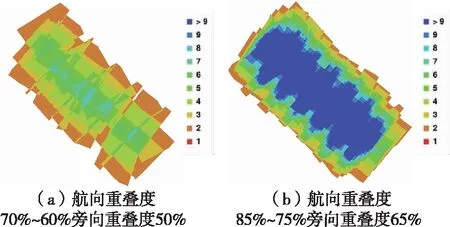
图3 两种重叠度下数据报告
对同一区域利用RTK固定解方式采集了一定的检查点,对两种重叠度下高程数据进行了精度分析,分析结果如表2所示。
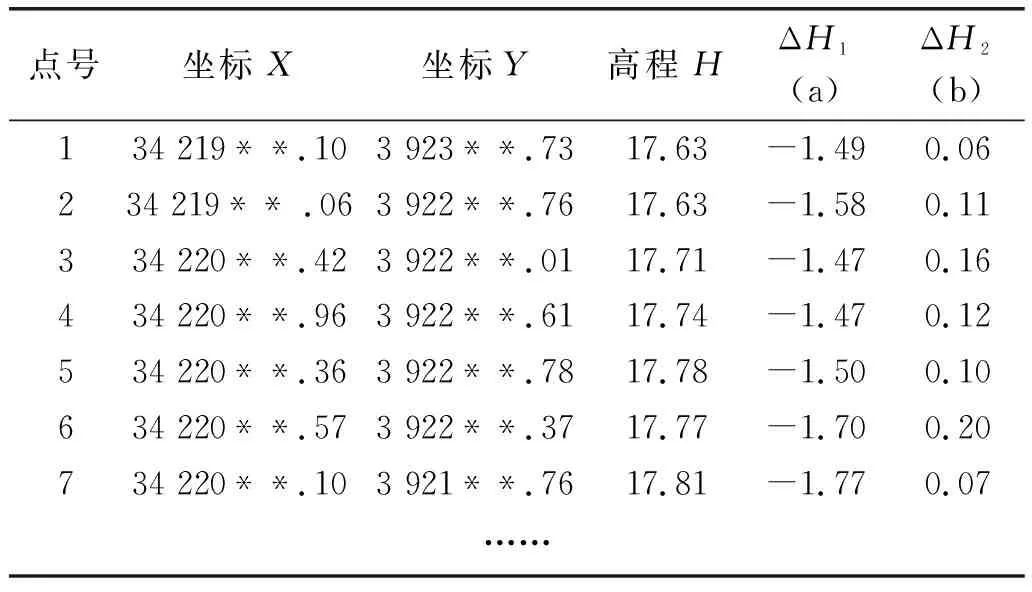
表2 精度统计表
上表显示中,ΔH1(a)代表航向重叠度70%~60%、旁向重叠度50%时影像获取的高程精度,ΔH2(b)代表航向重叠度85%~75%、旁向重叠度65%时影像获取的高程精度。从精度分析结果可确定当重叠度降低时,会导致航测区域内重叠像片的数量大大减少,从而影响照片相对定向精度,使影像高程精度受到严重影响。
2.3 大面积水域对航测高程精度的影响
摄影中心作像片的垂线,交点为像主点,一般而言,像主点即为像片的中心点。像片的像主点在数据处理过程进行三大定向及立体建模起到非常关键作用,照片像主点落水会直接影响到定向精度。在水利测绘中,经常会碰到航飞架次中带有大面积水域,同一个架次中水域占有面积大于影像的一半,在这种情况下是否会对整个影像的高程模型产生多大影响,本次针对引江济淮项目菜子湖段某一区域进行了航飞,由于菜子区域湖面较大,通过航飞后内业处理,将没删除水面照片与删除大部分水域照片进行了分开建模处理(图4)。
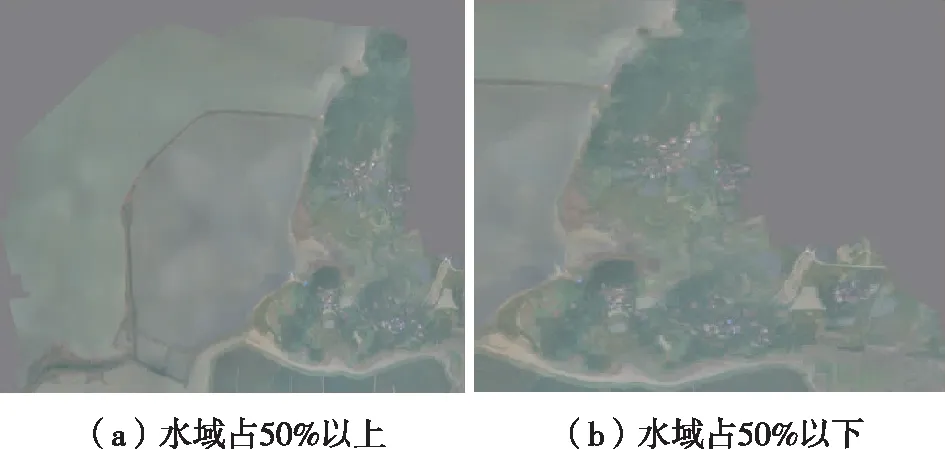
图4 水域面积占比不同情况下影像
对同一区域利用RTK固定解方式采集了一定的检查点,对处理后同区域影像进行了精度分析,分析结果如表3所示。
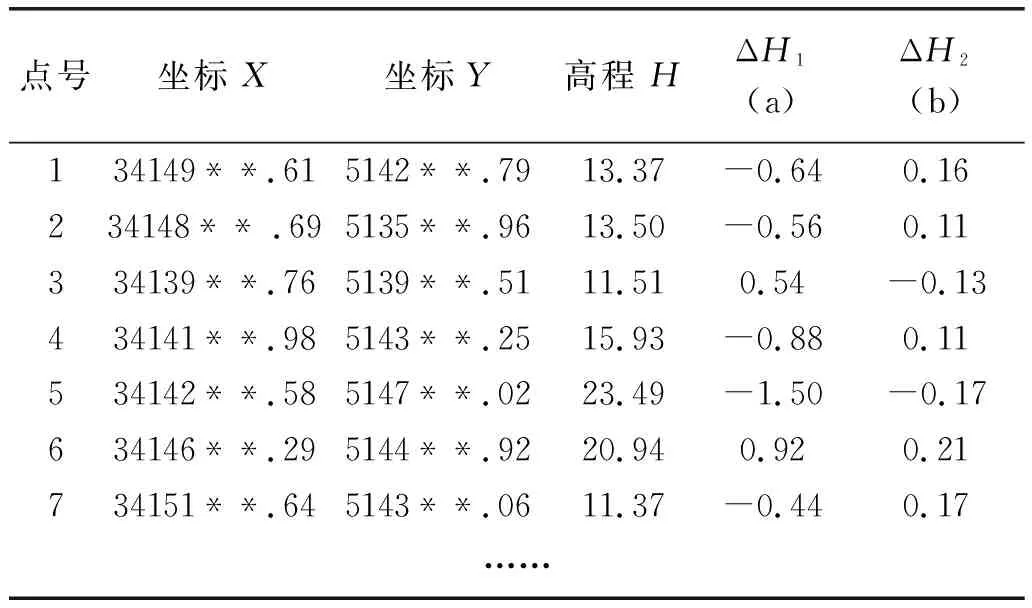
表3 精度统计表
通过上述实验分析,ΔH1(a)代表水域占50%以上影像高程精度,ΔH2(b)代表水域占5比50%以下影像高程精度,单个架次处理过程中,水域面积在影像整个区域占比50%以上会造成大部分像片像主点落水,在后续数据处理过程中导致误差较大。因此,为了避免像主点落水,一般航飞过程中遇到大面积水域,可删除对应水域照片再进行数据后处理来提高整体建模精度。
3 结 语
本文系统分析了无人机航测数据高程精度的影响因素,包括像片获取的质量、航飞参数中重叠度的设置、航飞架次中大面积水域等因素的影响。通过分析对比,上述任何一种因素都会对航测高程精度带来影响,其中影响最大的就是重叠度的设置,低重叠度会提高航飞效率,同时也降低了航测精度,因此,在外业操作过程中需要根据对数据质量的不同要求采取不同的设置方式;此外,飞行天气以及环境对航测精度也会造成较大影响,建议一般飞行时间尽量选择在天晴、少云时段进行;飞行区域飞行架次的划分也是非常关键,根据本文分析,飞行架次划分尽量避免单架次飞行区域内水域面积占比较大,若根据现场条件无法避免较大水域的情况下,可在数据后处理过程中适当减少一些水域照片进行建模。总之,影响航测精度的因素较多,需要根据实际情况在外业实践过程中进行不断的积累,根据积累的经验去不断的避免各种因素对航测高程精度产生的影响,从而在去掉航测仪本身系统误差外来进一步提高航测高程精度,为水利航测成果提供一份精确、可靠、有效的模型数据。