空中三角测量中像片连接点拓扑关系的矩阵表示算法及应用研究
2018-09-13刘娟
刘 娟
(广东汇源通集团有限公司,广东 佛山528200)
0 引 言
目前,我国正努力提高测绘地理信息的智能化水平。空中三角测量通过地面控制点精确计算航空影像的内外方位元素,是摄影测量处理的关键[1],其目标是提高空中三角测量的精度以及数解析摄影测量据处理的速度和质量可控性[2]。在传统空中三角测量数据处理过程中,根据测区飞行计划和获得影像情况,按航带建立航带影像列表和航带关系列表,由人工方式建立影像间的初始拓扑关系,并以测区工程文件形式表达。
数字摄影测量阶段,全自动空中三角测量对数字影像进行全自动特征点选取和转换,尽可能少人工交互,速度快、精度高、代价少[3]。像片和像片连接点拓扑关系的数字组织和管理全部由空三软件自动进行。为了提高空中三角测量的计算效率,胡海彦等[4]提出了一种摄影区域跨航线影像片号编排下的法化系数矩阵分块降维精简策略,通过理论分析和实际作业航摄影像数据平差试验,表明基于该策略的数据平差处理算法相比常规平差算法,在时间效率和存储效率上都有大幅度增强。针对倾斜摄影测量中大量的倾斜像片,魏祖帅[5]根据pos辅助信息,重新排列航带,重建了倾斜航空影像初始拓扑关系。
笔者从航摄像片分布图出发,采用二维矩阵格式存储像片和像片连接点的序号和名称,研究了像片连接点拓扑关系矩阵关键算法,为图像匹配和区域网平差提供了高效的像片连接点搜索策略。
1 像片与像片连接点拓扑关系结构
航空摄影为空中三角测量提供了如图1中(a)图的航线图,结合导航GPS数据,可以构建如图1中(b)图的像片位置图。
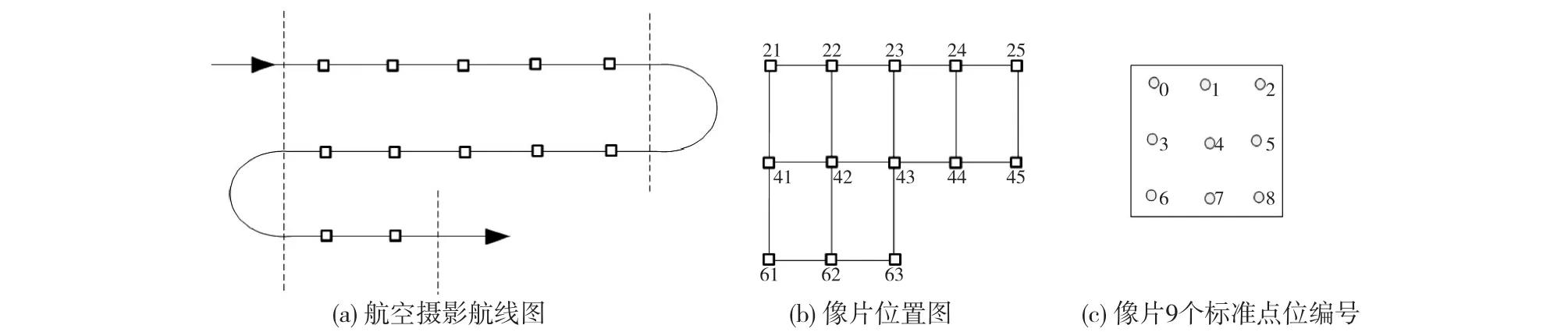
图1 航空摄影航线位置图
1.1 像片数据内容
(1)像片名称:根据航空摄影项目和有关规范要求,对测区航摄像片进行统一的命名,例如图1中(b)图中各像片名称。
(2)像片序号:从区域网平差角度出发,对测区航摄像片进行从0开始的编号,见图2(b)。
(3)像片标准点位图:在每张像片的9个标准点位选择像片连接点,在与相邻像片的重叠范围内具有同名像点,将每张像片的9个像片连接点统一进行编号,如图1(c)所示。
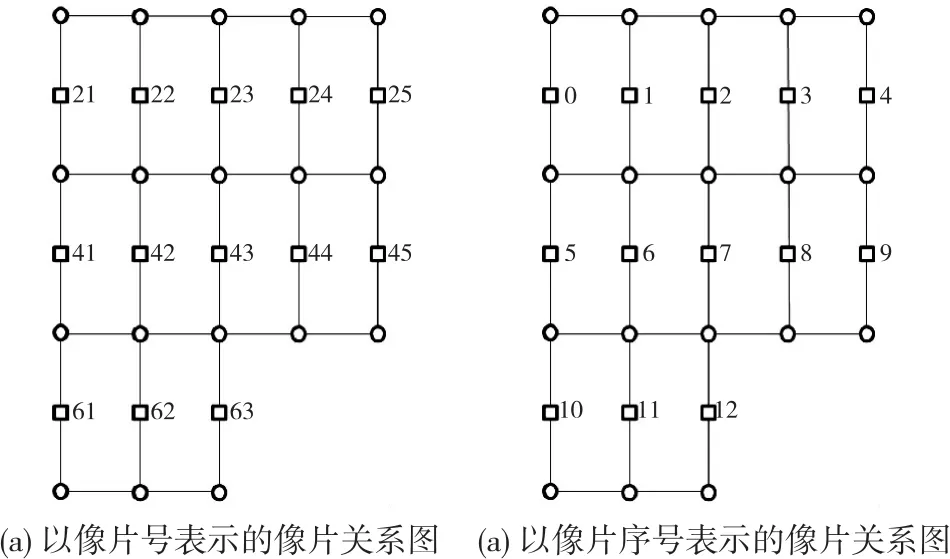
图2 像片与像片连接点关系图
1.2 像片连接点数据内容
(1)像片连接点点名:见图3(a)中的以像片连接点点名表示的关系图。
(2)像片连接点序号:见图3(b)中的以像片连接点序号表示的关系图。
(3)像片连接点像片坐标:像片连接点在各张像片上的像平面坐标数据。该坐标是自动图像匹配的成果数据,也是空中三角测量的观测值。

图3 像片与像片连接点关系图
2 像片连接点拓扑关系的矩阵表示算法
利用开发语言自身的二维数组存储像片和像片连接点,存储数据简单,读取的效率也高,将图2和图3的像片名、像片序号和连接点名、连接点序号用二维矩阵存储,可以为图像匹配和区域网平差提供高效的数字管理和存储方法。
2.1 像片矩阵的表示方法
(1)将图1(b)的航空摄影航线图以式(1)的photo矩阵表示:
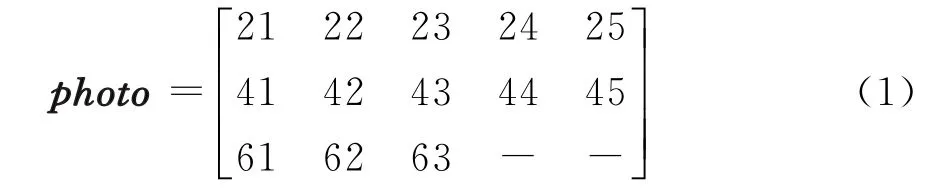
(2)对式(1)进行扩展,其方法是航带头尾及航带之间增减空白行,得到式(2)的photo_large_name矩阵:

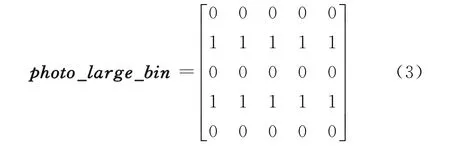
(3)对式(2)进行二值化,有像片的位置取值1,无像片的位置取值0,得到photo_large_bin矩阵:
(4)对式(3)中的元素进行排序计算,得到photo_large_ID矩阵,存储像片序号,为区域网平差提供像片序号排列关系:

2.2 像片连接点矩阵的生成算法
(1)对式(3)photo_large_bin中的每一个元素进行8领域运算,其原理是:以该元素为中心的8个相邻元素中,如果存在两个以上取值为1的则该位置取值为1,否则取值为0。运算结果为node_point_bin矩阵(像片连接点二值化矩阵):

photo_large_bin矩阵中为1的元素为该处式像片连接点,为0的元素则没有像片连接点。
(2)对式(5)中的元素进行排序计算,得到node_point_ID矩阵,存储像片连接点序号,为区域网平差提供像片连接点排列关系:

(3)对式(6)中的像片连接点进行命名,命名规则参考航空摄影项目和有关规范要求,生成node_point_name矩阵:

3 拓扑关系矩阵表示的应用
3.1 图像匹配中同名点的查找
图像匹配要对式(6)node_point_ID矩阵中所有点在像片中的同名点匹配出来,匹配的第一步是计算出该点分布在哪些图像的哪个位置。
利用像片连接点矩阵进行同名像点位置搜索的计算流程见图4(a),图4(b)为对序号为22图像连接点匹配示例,计算结果见图4(c),第22号点点名为53,精确得到位于序号为6、7、8、11、12五张像片的集体位置,为图像匹配提供了匹配依据。
3.2 光束法平差中像片连接点的查找
光束法平差要对所有像片的所有点联立误差方程式,计算每张像片9个标准点位对应的像片连接点序号是关键的计算内容。
利用photo_large_ID矩阵和node_point_ID能够得到,具体计算流程见图5(a),图5(b)为对序号为6的像片计算搜索的示例,第6号像片的像片名为42,其在node_point_ID矩阵中的8领域位置图见图5(c),分别是误差方程式中坐标未知数对应的点号。

图4 图像匹配流程图

图5 像片上各点序号的搜索方法
4 结 语
本文通过8邻域算法,由像片航线图自动生成像片矩阵和像片连接点矩阵,为图像匹配和区域网平差提供了存储量小、计算高效的图像连接点拓扑关系的矩阵表示方法,通过研究,得到的结论如下。
(1)二维矩阵结构简单,存储量小,计算效率高。(2)能够满足图像匹配和光束法平差的要求。
(3)本文仅限于对航向重叠度60%、旁向重叠度30%的图像进行算法研究,对于大重叠度的低空摄影测量图像需要对8邻域算法进行扩展,也能得到相应算法。
(4)本文没有对同一个像片连接点对应多个匹配点的情况加以研究,这也是后期研究的重点内容。