主动制冷型温控系统在捷联式重力仪上的应用
2021-11-05王响雷薛正兵
王响雷,杨 雨,薛正兵
(1.北京航天控制仪器研究所,北京100039;2.中国航天电子技术研究院,北京100094)
0 引言
随着惯性导航技术的发展,惯导系统(Inertial Navigation System,INS)测量精度的提升一直被人们关注[1],惯性器件误差控制与补偿研究对系统测量精度的提升起着至关重要的作用[2]。其中,温度误差对惯性器件的影响尤为重要,因此环境温度控制是提升其测量精度的关键技术[3]。惯性器件温度误差模型分为两类:1)静态温度误差,仅跟温度绝对值相关;2)动态温度误差,与温度变化率和温度梯度相关[4]。仅通过静态温度误差模型的标定与补偿,惯性器件的输出精度无法满足高精度的测量要求。
为了有效控制动态温度误差,需要对惯性器件进行精密环境温度控制,使得惯性器件工作在一个稳定的温度点上[5]。由于系统只能被动地通过仪器结构的热传导、热辐射、热对流等方式进行散热,考虑到INS工作的外部温度环境,惯性器件的工作环境稳态温度一般在55℃~60℃之间[6]。在高温情况下,一方面,惯性器件的输出漂移与长期稳定性相较于常温和低温均偏高;另一方面,惯性器件及电路电子器件的使用寿命和可靠性也大大降低[7]。
针对上述问题,本文以某型捷联式重力仪为研究对象,设计了新型温控系统的方案,主要实现了温控系统的主动制冷功能,降低仪器本体稳态温度,为惯性器件提供了一个稳定的工作环境。
1 仪器温度场分析
1.1 仪器结构
某型捷联式重力仪主机的结构主要由五部分组成:箱体、上盖组合、下盖组合、本体组合和电路板组合。箱体、上盖组合和下盖组合共同构成仪器的外壳,是重力仪的第一级热传导结构;本体组合最外层是本体罩,其内部包含本体单元和加速度计单元。完整的仪器是一个针对加速度测量单元和仪器外环境的三级温控结构,其示意图如图1所示。

图1 三级温控系统结构示意图Fig.1 Schematic diagram of the three-level temperature control system
1.2 仪器温度场仿真分析
在加热型温控系统作用下,上述三级热传导温控系统的各级稳态温度由外到内依次为45℃、51℃、56℃。本文使用内嵌于SolidWorks的计算流体力学软件FloEFD对仪器的三维模型进行温度场分析,图2为仪器处于外部高温环境(40℃)时的温度场特征剖面图。位于热传导结构最内层级的加速度测量单元温度高达56℃,且仪器内部温度场分布不均匀,整体温度梯度过大,不利于惯性器件的工作稳定性。
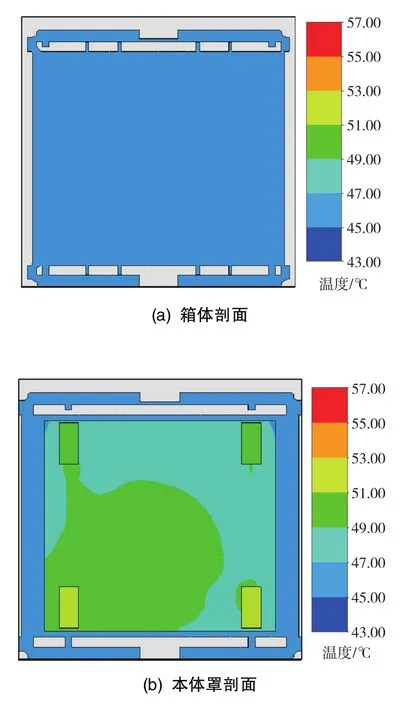

图2 仪器温度场特征剖面图Fig.2 Characteristic section of instrument temperature field
2 加速度计的温度稳定性
重力测量用高精度加速度计是捷联式重力仪的主要传感器之一,它的输出精度及稳定性直接影响着仪器的测量精度与稳定性。加速度计的比力测量误差δfb主要受加速度计零偏误差K0和标度因数误差K1的影响[8]。表1为某批次三只石英挠性加速度计在常温下的性能参数。

表1 加速度计的性能参数Table 1 Performance technical parameters of accelerometers
温度发生变化时,加速度计的零偏误差K0和标度因数误差K1都会发生变化,进而影响加速度计的温度稳定性。加速度计的温度稳定性包含了K0和K1的静态温度误差与动态温度误差。通过误差建模与标定,K0和K1的静态温度误差可以通过软件进行补偿;而K0和K1的动态温度误差与加速度计工作温度的变化率、梯度等变量有关,该部分难以建立误差模型,一般采取精密温控的方法进行控制[9]。
图3为上述三只加速度计全工作范围(-40℃~+70℃)下的K0和K1的测量散点图和拟合曲线。对图3中的拟合曲线进行求导,可以得到各自的温度系数变化曲线,如图4所示。在该温度区间下,三个加速度计的K0和K1的平均温度系数分别为3.72μg/℃ 和 58.74 × 10-6/℃、12.42μg/℃ 和62.66×10-6/℃、0.95μg/℃ 和 85.81×10-6/℃。 根据两项误差的温度变化曲线,并综合其温度系数变化,设置石英挠性加速度计工作温度在35℃~45℃范围内可以综合优化加速度计的静态温度误差及其温度系数,有利于软件补偿。


图3 K0和K1的测量拟合曲线Fig.3 Measurement fitting curves of K0and K1
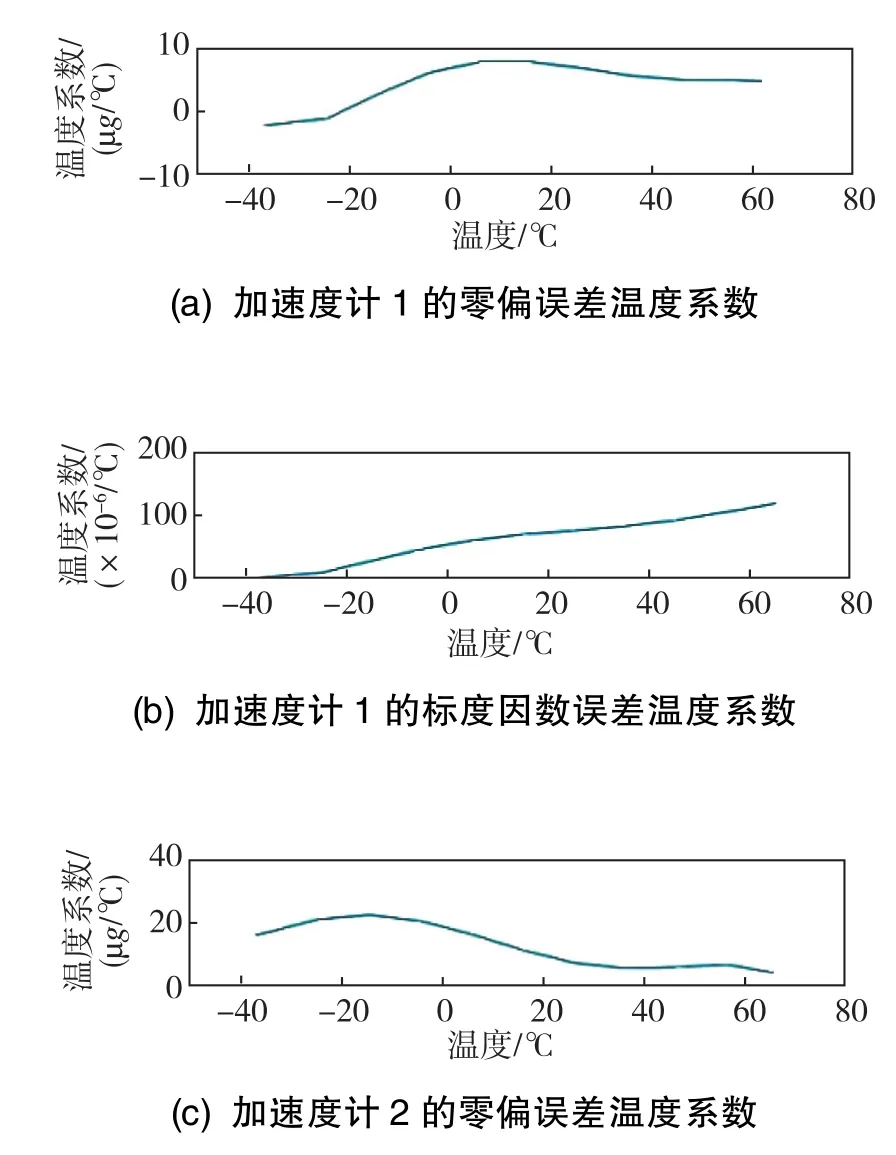

图4 K0和K1的温度系数变化曲线Fig.4 Temperature coefficient curves of K0and K1
此外,本文对输入为1g的加速度计进行了长期稳定性测量,同一加速度计在不同温度下的稳定性测量结果如表2所示。根据10天、25天的测量结果,相较于高温状态,处于常温状态下的加速度计稳定性更好,且常温下加速度计13个月的稳定性在数值上优于高温下25天的稳定性,这说明高温对加速度计输出的长期稳定性影响极大。

表2 长期稳定性测量结果Table 2 Measurement results of long-term stability
所以,针对加速度计的温度稳定性难以建模和长期稳定性受温度影响问题,本文设计了带有主动制冷功能的新型温控系统,能够降低仪器内部温度,稳定加速度计的动态温度误差,提升加速度计的温度稳定性与长期稳定性。
3 主动制冷型温控系统设计
主动制冷型温控系统使用基于Peltier效应的TEC元件制冷。通电时,TEC元件冷端吸收本体内部产生的热量,热端将该部分热量传导至仪器外壳部分,并通过外壳结构的热辐射和风机的强制对流将热量传递至环境中。TEC的主要技术参数如表3所示。
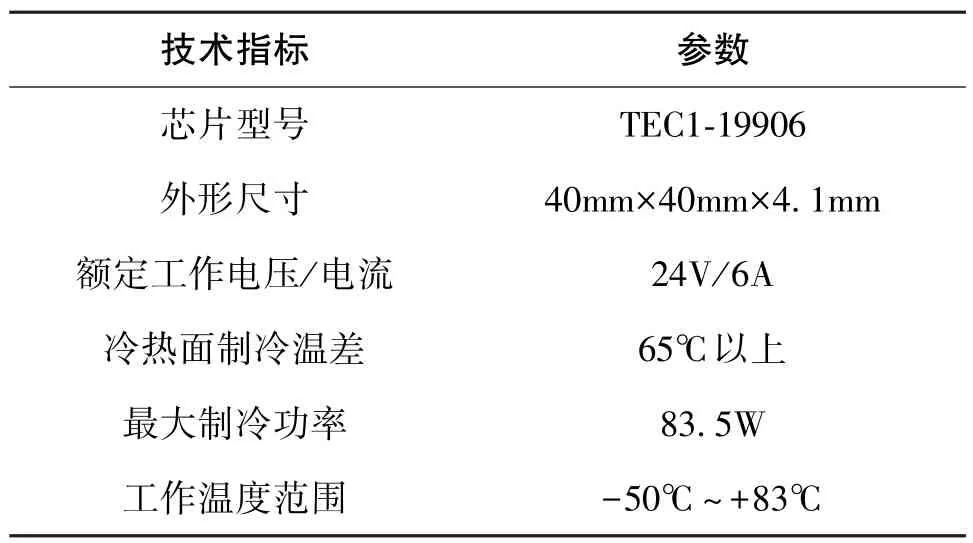
表3 TEC的主要技术参数Table 3 Main technical parameters of TEC
基于嵌入式芯片STM32的系统硬件设计框图如图5所示,整个系统闭环设计的原理是:通过采集各个温度监测点的温度偏差及其变化率,控制芯片根据模糊PID控制策略输出相应的脉冲宽度调制信号(Pulse Width Modulation,PWM)来调节控制对象的工作状态,以达到控制结构温度的目的。铂电阻测温传感器与控制对象通过重力仪结构进行耦合,电路板及控制对象分布示意图如图6所示。
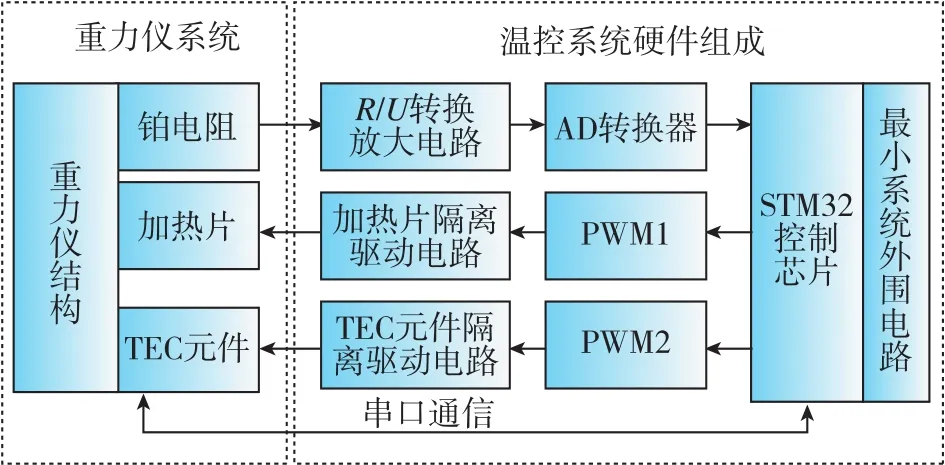
图5 主动制冷型温控系统硬件设计框图Fig.5 Hardware design block diagram of active-cooling temperature control system

图6 硬件电路板及温控对象分布图Fig.6 Distribution diagram of hardware circuit board and temperature control object
作为测温传感器时,铂电阻阻值随温度的变化近似线性,根据电桥放大及A/D转换电路的参数,测温模块的分辨率优于0.001℃。由于测温电路模块中的测量误差、温度漂移、电平波动等使用铂电阻出厂参数进行温度计算会造成温度测量误差,为了消除该项误差,本文进行了测温模块的标定校准,对铂电阻的温度系数进行了重新修订,并通过测温验证实验得到:测量温度值与绝对温度值之间的误差在0.06%以内。
4 系统仿真与实验验证
与1.2节加热型温控系统仿真相似,对仪器三维模型添加热电制冷器模拟组件,得到配置主动制冷型温控系统的仪器温度场,其特征剖面温度分布如图7所示。

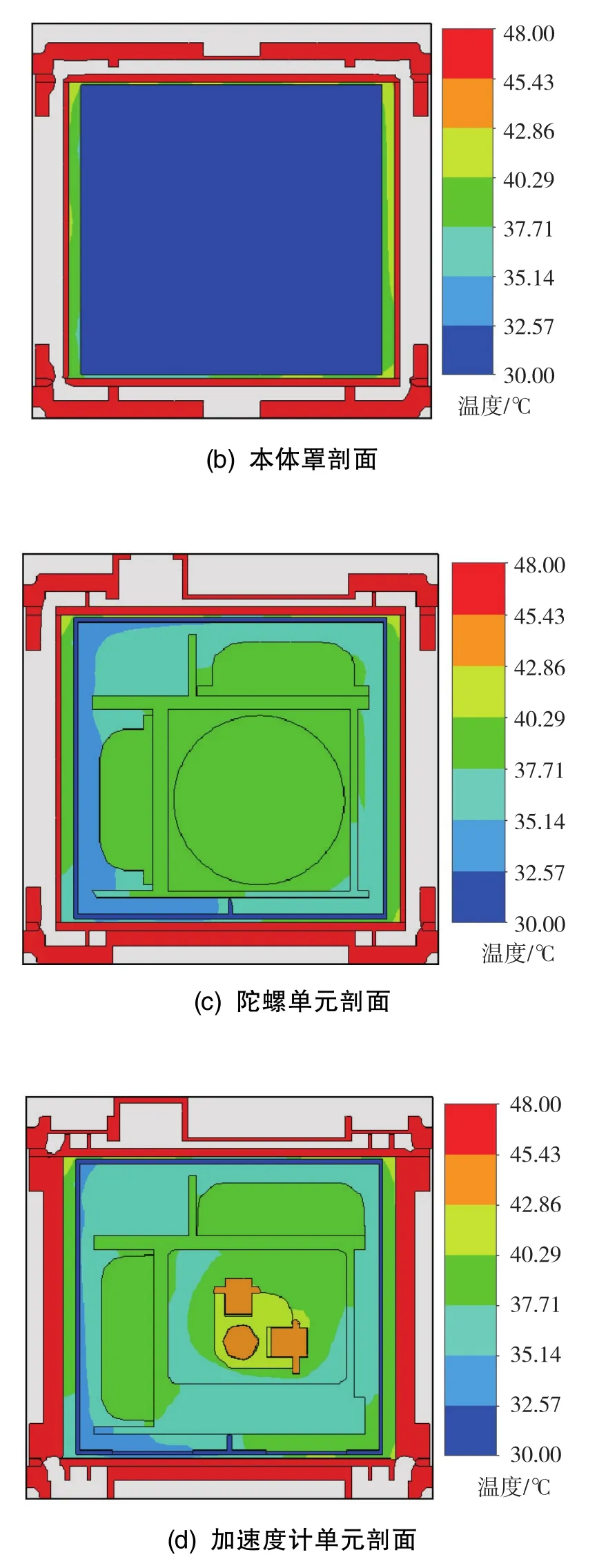
图7 仪器(配置主动制冷型温控系统)温度场特征剖面图Fig.7 Characteristic section of instrument temperature field with active-cooling temperature control system
为了验证该温控系统的有效性与合理性,本文整合了主动制冷型温控系统与重力仪的结构,并对系统仿真控制效果进行了实验验证。利用温箱设置环境温度为40℃,保温2h后进行控温实验。由图8(a)的本体罩温度监测曲线可知,本体罩结构温度在系统运行约1200s后达到30℃的稳态。由图8(b)的曲线局部放大图可知,温控系统的单级稳态控制精度在±0.05℃内。

图8 本体罩温度监测曲线Fig.8 Temperature monitoring curve of body cover
统计仪器的各级稳态温度数据,并将其与加热型温控系统下的温度数据进行比较,结果如表4所示。由表4可知,配置主动制冷型温控系统的仪器本体罩温度下降最为明显,温差达到了-21.00℃,且加速度计工作环境温度能够降低并稳定到43.59℃,处于其适宜温度范围内。

表4 不同温控系统下的温度数据比较Table 4 Comparison of temperature data under different temperature control systems
5 结论
本文从仪器温度场分析入手,通过测量数据分析了高温对加速度计输出误差及其温度系数的影响,对比了常温和高温下加速度计的长期稳定性水平,并据此提出了主动制冷型温控系统的控制指标。主动制冷型温控系统以加热片和TEC元件为控制对象,在外界高温环境下能够将仪器的本体罩稳态温度从51℃降低到30℃±0.05℃,同时有效降低了惯性器件的工作环境温度及温度变化率,合理控制了温度场分布。本系统提升了捷联式重力仪的可靠性和环境适应性,有助于捷联式重力仪在复杂环境下开展高精度重力数据的动态测量工作,同时也为优化其他类型惯性导航仪器的温控系统提供了参考方案。