基于微惯性技术的人体头部运动姿态测量
2021-11-05牛海涛靳舒馨
张 天,王 强,牛海涛,靳舒馨
(1.中国兵器工业计算机应用技术研究所,北京100089;2.北京卫星导航中心,北京100094)
0 引言
随着现代军事装备的智能化升级,智能化武器装备对智能控制提出了更高的需求[1-2]。头盔瞄准镜、光电观察云台作为典型的智能化装备,将武器站、光电云台等受控对象与操控人员的头部运动直接结合,实现自然的人机交互方式,提升了作战效率[3-4]。然而,武器站、光电云台等随动受控对象并未按照人体头部的运动特性进行设计,难以满足执行器对实时性、准确性与稳定性的全部需求,出现控制延迟大、执行精度低、交互体验差等问题,限制了此类智能装备的应用空间。
为实现人体头部运动规律的准确表征,本文使用小型六轴微机电惯性测量单元(Inertial Measurement Unit,IMU)作为传感单元,通过姿态解算获取人体头部运动过程中的实时姿态信息[5]。战术级微惯性器件因其较高采样频率与较低噪声[6]在消除零偏后可在短时间内实现高精度实时测量,并因其体积小、质量小的特性,可真实还原人体头部运动特性。
术中导丝断裂分析其主要原因是操作技术不当,置入椎弓根螺钉时出现与导丝成角,螺钉旋入过程将导丝截断,其次是导丝反复使用。
基于上述原理,为全面反映人体头部运动的静态特性与动态特性,本文设计了头部快速位置响应、头部正弦摆动响应两组采集实验,结合姿态解算算法获取了多组数据分析头部运动的典型参数,并从中分析出了极限加速度、极限摆动频率等几个典型的运动特征指标。
1 姿态信息采集
在实际应用中,MEMS惯性测量单元输出为载体坐标系三个轴向的加速度(比力)与角速度信息。需通过姿态算法根据上一时刻的姿态信息与三轴陀螺输出,更新载体在导航坐标系下的姿态信息,完成体感信息的获取[7-8]。在本文中,选用的是商用六轴微机电惯性测量单元ADIS16475-2,常 温漂移量小于5(°)/h、量程大于300(°)/s的便可满足体感控制需求[9]。六轴惯性传感器ADIS16475对外数据接口为串行外设接口(Serial Peripheral Interface,SPI)同步全双工串行通信总线,具备同步触发功能,可实现惯性数据的实时获取。但SPI协议无法实现长距离传输,在实际应用中使用单片机STM32F103完成数据的采集与解算,并通过RS422的4线全双工差分传输实时发送至上位机完成采集过程,其硬件原理如图1所示。此部分通信延迟主要存在于采集与传输延迟、异步通信延迟,总延迟小于微秒量级。

图1 搭载ADIS16475的STM32最小系统Fig.1 STM32 minimum system equipped with ADIS16475
2 IMU姿态解算
三维空间中任意两个坐标系的角位置关系可通过三次姿态角基本旋转(Euler旋转)或一次四元数旋转实现对齐,并且两种旋转方式的转换矩阵存在等价关系。因此,可以通过IMU数据采集与四元数更新实时获取载体姿态信息[10]。
琮的基本形制为方,说明它主要用来祭地,然而它内有圆孔,也就兼含天的意义。琮既然兼有地与天两重意义,自然用作墓主人的身份的标志,自然比璧合适。
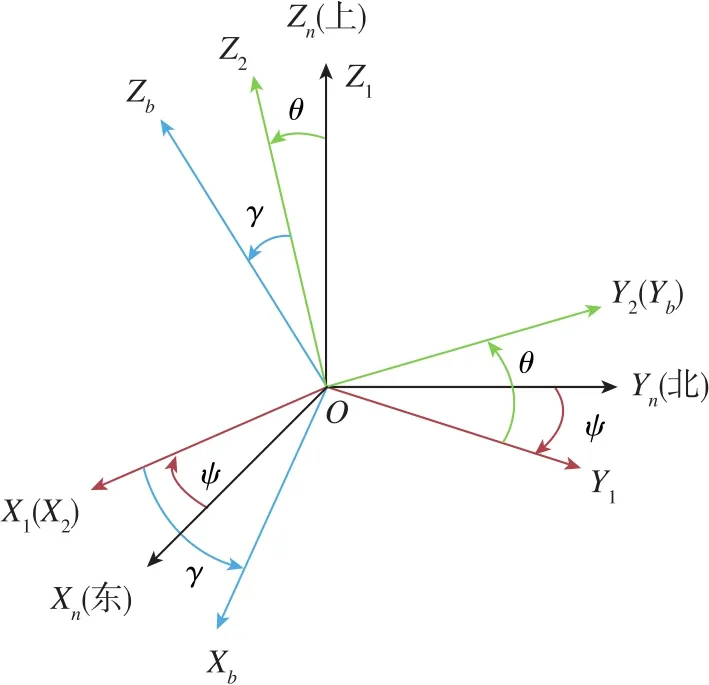
图2 空间角位置旋转示意图Fig.2 Schematic diagram of spatial angle rotation
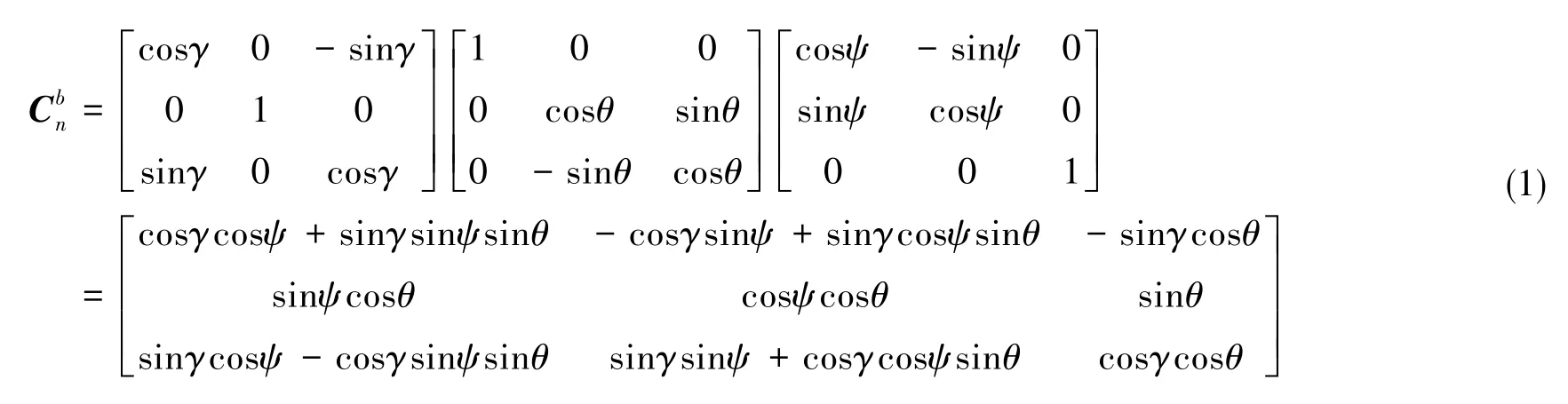

比照式(1)、式(2),可求解姿态角
设定航向角为ψ,俯仰角为θ,横滚角为γ,如图2所示,则由导航坐标系(n系)至刚体固连坐标系(b系)的相应三次姿态角旋转矩阵为

设计头部快速位置响应实验以模拟头部对外部阶跃信号的姿态响应,获取头部转动时的静态信息。在实验中,测试者头部从起始位置依次快速转头到A、B、C、D、E五个位置,并在每个位置停留一小段时间,如图4所示。

式(6)中,Q(tk)为当前时刻四元数,Q(tk-1)为上一时刻四元数。按照式(6)更新四元数后,再通过式(3)求解姿态角,完成姿态解算。
采集两组患者的临床资料、临床特征及冠状动脉造影特点,并进行分析。冠状动脉造影术应用Judkins法,经挠动脉或股动脉进行穿刺,并将6F或7F血管鞘置入。
就图6的单次测试数据来看,头部对单点阶跃信号的运动响应更近似多阶系统,体现在头部到达指定位置点时测得的角度存在小幅超调。相邻点之间的头部运动时间约为300ms,因生理结构限制,极限角速度持续时间十分短暂,仅为100ms左右。另外从静止时的数据可以看出,即使在头部稳定时,姿态输出也有一定范围的波动,该范围在1°以内。
如图5所示,去除了高频调制后,得到了提取的一次谐波和二次谐波信号,其中抖动波形是由于光路或电路系统带来的低频噪声所引起,对上述信号采用平滑滤波等数据处理方法处理后,根据甲烷气体检测原理进行一次谐波和二次谐波的比值计算。

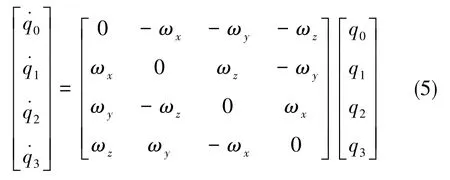
式(4)中,Q为四元数,为载体固连坐标系b到参考坐标系R的变换角速度,为捷联惯导输出,由姿态更新的最新值确定,分别为位置速率和地球自转速率,两者在本文中可近似忽略为0。将式(4)的四元数运算写成矩阵形式,即
另外,新公司在战略上的调整还体现在将市场从一线城市向二线和三线城市扩展。由于中国区域发展不平衡,不同区域对设施的技术需求不同,我们将加大研发方面的投入,通过研发能力的提高和当地人才的培养实现技术本地化,为当地客户提供适应其实际需求的产品和技术,从而尽快进入目标市场。
3 头部姿态采集实验
将IMU与第1节所述的硬件采集电路固定在头部前额处,并将输出IMU数据的采集串口连接到采集计算机上,在采集计算机上应用第2节的算法获取头部运动姿态的角度信息,具体如图3所示。完成实验设备布置后,设计了头部快速位置响应、头部正弦摆动响应两组采集实验来表征人体头部的运动特性。

图3 实验采集IMU实物图Fig.3 Physical picture of IMU collector
3.1 实验一:头部快速位置响应实验
为实现四元数的实时更新,还需要建立四元数微分方程

图4 头部快速位置响应实验示意图Fig.4 Schematic diagram of head fast position response experiment
为避免超出人体转动范围,A、B、C、D、E五个位置交错分布在正前方±60°范围内。该实验共重复10次,测得的数据如图5(多次测量)、图6(多次测量中截取的单次测量结果)所示。
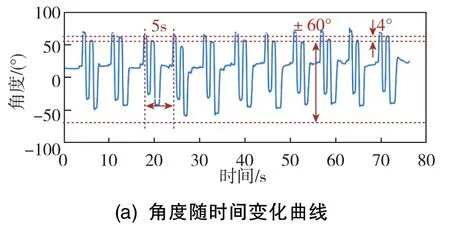

图5 多次测量的快速位置响应实验Fig.5 Fast position response experiment with multiple measurements

图6 单次测量的快速位置响应实验Fig.6 Fast position response experiment with single measurement
从人体头部姿态运动的速度与加速度实测结果可以看出,人体头部运动的极限速度与加速度很高,但维持时间较短。在设计随动机电系统时可根据此数据提出响应特性需求,并且为减少机电系统延迟,应尽可能匹配头部运动的速度与加速度指标。
由式(5)可知,在算法实际使用中,只要初始四元数已知,便可根据捷联惯导陀螺输出(采样间隔已知)实时更新四元数,写为迭代形式
此外,笔者建议将高校法学院法律诊所的学生吸纳到社区矫正工作中。相较于其他的志愿者,法律诊所的学生具备专业的法律知识背景,对社区矫正工作也有一定的了解,具有明显的优势。如果吸纳他们参与社区矫正工作,他们定会快速地掌握工作流程和方法,负责相应的工作。
从10次的测试数据可以看出,头部运动周期约为5s左右,运动范围在±60°内,与位置点分布间隔相同。受眼部运动影响,多次运动中头部再次到达固定位置时存在位置偏差,该偏差在4°以内。虽然不同次测量的重复精度有限,但角度变化趋势大体相同,通过差分计算得到头部角速度极限值接近 600(°)/s。
3.2 实验二:头部正弦摆动响应实验
设计头部正弦摆动响应实验以模拟头部对外部正弦信号的姿态响应,获取头部转动时的动态数据,如图7所示。在实验中,测试者在舒适范围内以最大振幅往复快速摆头20次,共重复3组。

图7 头部正弦摆动响应实验示意图Fig.7 Schematic diagram of head sinusoidal swing response experiment
记录头部的姿态数据,如图8所示。
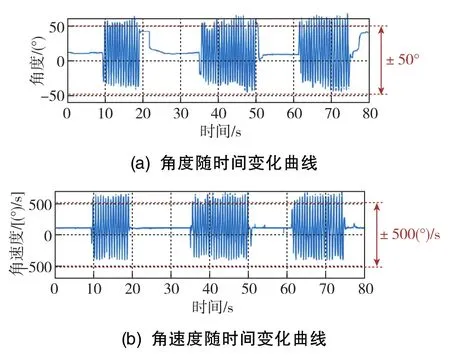
图8 多次测量的正弦摆动响应实验Fig.8 Sinusoidal swing response experiment with multiple measurements
从3组实验数据可以看出,头部往复运动的角度幅度在 50°左右, 角速度幅值在 500(°)/s左右,二者均比头部快速位置响应实验中测得的数值小。为进一步获取摆动的频率信息,对单组正弦摆动的角速度采样进行Fourier分解,数据如图9所示,测得运动的主频约为1.546Hz,速度幅值为 379.5(°)/s。
阿里研究院与德勤研究联合发布报告《平台经济协同治理三大议题》,报告提出了平台经济协同治理三大挑战:权益保护、合理税收和公平竞争,德勤预计中国平台经济规模将会在2030年突破100万亿。报告提到,2016年中国电子商务交易额超过20万亿元,网民7.1亿,互联网普及率达到51.7%,平台经济已经占据了GDP的10.5%,如今平台经济正为中国经济营造出热气腾腾的发展场景。截止至2017年7月,全球十大平台经济体市值已经超过十大传统跨国公司,其中中国公司占三席[5]。
从正弦摆动实验结果可以看出,人体头部运动对系统响应频率的要求较高,小型机电设备容易达到此运动指标,但大型随动平台设计时应考虑针对此指标优化系统机电性能。如果峰值速度与加速度无法达到上述要求,将体现出随动系统整体时间延迟。

图9 正弦摆动响应的Fourier分解Fig.9 Fourier decomposition of sinusoidal swing response
3.3 实验小结
快速位置响应实验能比较全面地反映出真实环境下人体头部在不同观察目标之间切换的点到点运动特性,数据表明人体头部运动具有很大的瞬态速度与加速度,但运动持续时间较短,可对随动系统的基本性能进行约束。正弦摆动实验能够反映出人体头部对周围环境连续侦查情况下的动态特性,其固有频率与振幅可以成为极限环境下随动系统连续动作的评判标准。上述实验的主要误差源于IMU零偏与噪声引起的测量误差,相比于测量值的波动性可以忽略不计。
4 结论
本文借助微惯性技术针对人体头部运动特征描述进行了详细分析,通过头部快速位置响应、头部正弦摆动响应测得人体头部极限速度约600(°)/s、0(°)/s~600(°)/s 的加速时间约 100ms、极限摆动频率约1.546Hz等多个运动特性,为军事装备中随动执行器机电特性设计提供了参考依据。后续研究可结合摄像头实现视觉与IMU的融合姿态测量,对人体头部运动进行长时间监测,为机载、车载随动机电系统优化提供更多信息。