面向战略导弹的新一代惯性系统
2021-11-05焦泽德魏宗康高荣荣
焦泽德,魏宗康,高荣荣
(北京航天控制仪器研究所,北京100039)
0 引言
实现战略导弹的高精度、高可靠和实战化是新形势高强度对抗条件下摄战统一的迫切需要,是体系作战的必然要求,也是提升毁伤效能的最佳手段,而惯性系统是现阶段制约我国战略导弹精度和实战化水平提升的关键因素。为提高惯性制导精度,采用惯性平台系统是国内外远程导弹惯性器件的主流方案,其优点是通过框架及伺服回路隔离载体的角运动从而消除掉加速度计中的动态误差。目前,我国战略导弹配套的惯性平台系统有静压气浮平台、液浮平台、静压液浮平台以及三浮平台等[1],面临的长期热待机、快速启动等实战化水平要求越来越严苛。另外,为实现全姿态功能,惯性平台在两框架三轴平台基础上再增加一个随动框架以克服 “框架锁定”,带来的问题是体积增大、结构复杂[2-4]。相对平台系统,捷联系统具有结构简单、可靠性高、全姿态解算的优点。随着光学陀螺仪精度的提高以及 “三自”激光惯组解决了不拆弹自标定的问题后,捷联系统已在部分战略导弹中得到了应用,并与惯性平台在预研项目中形成了全面竞争格局。需要注意的是,“三自”激光惯组虽然通过增加框架解决了零次项和一次项等低阶误差系数的自标定问题,但在飞行过程中框架处于锁定状态,不能隔离弹体的角运动,加速度计动态误差会直接影响落点精度。
综上分析,平台系统和捷联系统各有优点和缺点且具有互补性。比如:1)平台系统从物理上隔离角运动,而捷联系统动态误差较大;2)捷联系统无框架即可实现全姿态,而平台系统只有采用三框架四轴结构形式才具备全姿态功能。如何能实现平台系统与捷联系统二者之间优势融合、缺点规避,既能做到小体积、全姿态,又能实现动态误差的物理隔离呢?我国未来远程战略导弹将重点提升突防能力、机动性等应用性能,需要在高动态环境下进一步提升纯惯性制导精度。针对平台系统和捷联系统的局限性,本文首次提出了一种可同时满足高精度、全姿态、小体积的新一代惯性系统——速率平台,该系统将推动我国远程战略导弹武器性能的跨越式发展。
1 三类惯性系统的局限性
我国惯性系统的发展历程简化示意图如图1所示。20世纪60年代,第一代液体近程地地弹道导弹采用位置捷联系统;20世纪80年代,实现全程飞行的中远程液体战略导弹采用静压气浮平台系统;20世纪90年代,静压液浮平台系统得到应用;20世纪90年代至21世纪前10年,捷联系统快速发展,挠性捷联系统、光纤陀螺捷联系统和激光陀螺捷联系统相继应用于战术导弹;在最近10年,三浮平台系统与三自激光惯组在战略导弹飞行中试验成功。从惯性系统的发展历程可以看出,惯性系统可以划分为三代产品:位置捷联、位置平台和速率捷联。
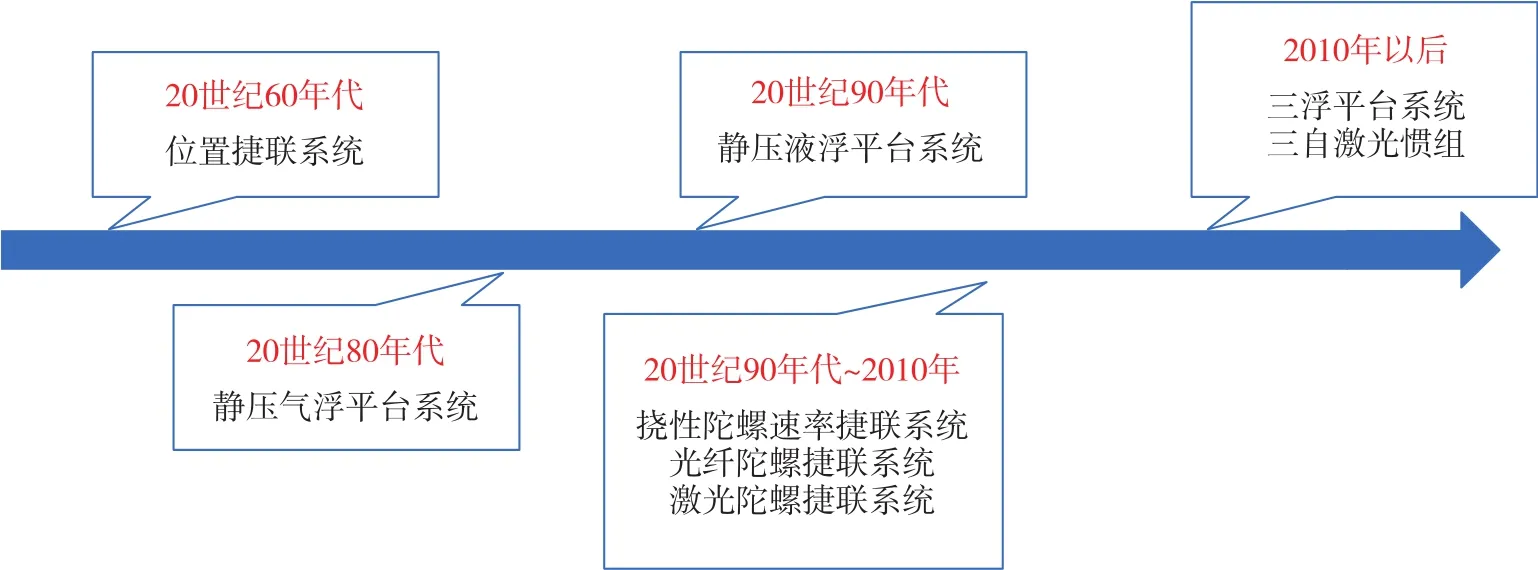
图1 我国惯性系统发展历程示意图Fig.1 Schematic diagram of the inertial system development progress in China
1.1 位置捷联系统
位置捷联系统的定义为:利用位置陀螺仪测量载体姿态角的捷联系统。位置捷联系统的水平陀螺仪和垂直陀螺仪为两框架陀螺仪,高速转动的转子具有定轴性并在理想状态下相对惯性系保持稳定[5]。位置捷联系统根据陀螺仪框架角度传感器可直接测量出载体相对惯性系的角度信息,不需要数学解算,这是其优点。根据转子和框架的支承方式,位置陀螺仪的典型产品有滚珠轴承框架式陀螺仪、静压气浮两自由度陀螺仪等。
位置捷联系统虽然是第一个真正意义上的导航系统,具有开创性,但存在的问题是:
1)由于陀螺仪开环工作,干扰力矩引起的进动使得转子轴相对惯性空间发生变化。因此,陀螺仪漂移值较大,只能短时间工作。
2)当陀螺仪内框架角为90°时,转子轴、内框架轴和外框架轴处于一个平面,“框架自锁”使得两自由度陀螺仪功能失效,不能全姿态工作。
3)由于加速度计直接与载体固连,动态误差较大。
1.2 位置平台系统
传统上并没有根据陀螺仪测量信息是角度或角速度来定义平台系统的,而是根据支撑方式来定义平台。比如,稳定平台的定义为:对于框架式惯性测量单元,以规定的方式控制惯性测量组件指向惯性空间系或当地水平。浮球平台的定义为:利用液浮球支承代替框架的全姿态稳定平台。之所以这样分类,是因为静压气浮稳定平台、动调陀螺稳定平台、液浮稳定平台、静压液浮稳定平台、三浮稳定平台所采用的陀螺仪都是角度输出。为方便理解,定义一个新的概念——位置平台系统,就是:利用位置陀螺仪测量台体角度并以规定的方式控制框架以隔离载体角运动的平台系统。
位置平台系统在物理上通过框架隔离了加速度计误差模型中与角运动有关的动态误差项,相对于位置捷联系统的使用精度大幅提高,但全姿态的问题是关注的焦点[6]。所谓的全姿态问题就是三轴平台系统的 “框架锁定”,三轴平台外框架轴、内框架轴和台体轴三者处于一个平面内。此时,垂直于该平面的方向不能隔离角运动,位置陀螺仪瞬时输出异常,意味着平台台体相对惯性空间将会发生转动。
为了避免三轴平台系统框架锁定的发生,主要解决措施是:在内框架中增加挡钉以限制内框架角的运动范围,使内框架角βyk工作在±40°或±60°的范围内。因此,三轴平台不能满足载体大机动运动的要求,而只能应用于机动姿态有限的载体上。目前,应用于战略导弹的三轴位置平台有静压气浮稳定平台系统、静压液浮稳定平台系统以及液浮平台系统等。
为了满足大机动飞行的需求,克服三轴平台“框架锁定”而不能实现全姿态功能的难题,发展出了四轴平台系统。相对三轴平台系统,四轴平台系统在台体、内框架和外框架的基础上增加了随动框架,随动框架处于平台外框架和基座之间。随动回路信号来自于内框架角,采用正割分解器进行增益补偿,其核心是使内框架角工作于零位。可以看出,四轴平台系统相比三轴平台增加了一个框架,体积增大,结构、轴端元件和电气系统相对复杂。典型的四轴平台系统有动调陀螺稳定平台系统、三浮平台系统。
1.3 速率捷联系统
速率捷联系统的定义为:利用速率陀螺仪测量载体角速率的捷联系统。由于引入了四元数、方向余弦和旋转矢量等数学方法,速率捷联系统实现了全姿态解算功能,而且其体积较小、结构简单、可靠性较高。典型的速率捷联系统有挠性捷联惯组、激光陀螺捷联惯组、光纤陀螺捷联惯组、MEMS捷联惯组等。但是,速率捷联系统与位置捷联系统有一个共同的特点,那就是加速度计的动态误差较大且无法实现自标定。
随着武器装备实战化能力需求的提升,惯性系统全面推行 “三自”功能,即:自标定、自瞄准、自检测。其中,自标定是指惯性系统自身实现参数标定,避免定期下弹标定;自瞄准是指惯性系统自身进行瞄准计算,取消地面光学瞄准设备;自检测是指惯性系统自身进行动态监视、故障诊断,充分保障武器系统的实战化性能。
目前,为解决捷联惯组不拆弹时的自标定问题,激光惯组、光纤惯组借鉴惯性平台系统技术,增加框架转动机构,实现了 “三自”功能,其工作原理为:在地面测试阶段利用双轴转动机构进行IMU的位置翻转,对各项低阶误差系数进行系统级自标定、多位置对准;在飞行任务阶段将转动机构进行锁紧,转换到捷联工作状态。
虽然三自光学惯组具有光学陀螺仪线性度好、误差模型简单、可靠性高等优点,但其自标定功能仅能分离出加速度计的低阶误差项,无法分离加速度计的高阶误差项。另外,导弹起飞后三自光学惯组的框架处于锁定状态,并不能隔离与角运动有关的加速度计动态误差。可以说,三自光学惯组仍工作于传统的捷联模式,且体积增大。
需要强调的是,混合式惯性导航系统是速率捷联系统的一种特殊形式,这是因为混合式惯性导航系统的原理是采用旋转调制使台体绕一个或两个框架轴旋转以抵消零次项等误差,框架转动的敏感信息来自于轴端框架角而非陀螺仪。另外,由于台体转动过程中加速度计会产生动态误差,混合式惯性导航系统不适宜战略导弹中惯性系统隔离角运动的场景,而适合于低过载、运行较平稳的长航时工作场景[7-8]。
综合以上分析,位置平台系统和速率捷联系统代表了现阶段主流的两种惯性导航设备,二者在实现惯性导航共同特点的基础上,各自优点和缺点存在着难以调和的不相容之处,主要表现在以下两点:1)采用位置陀螺仪的惯性平台只有采用四轴平台结构方式才能实现全姿态功能,虽然可以隔离载体的角运动,但体积增大;2)速率捷联系统无需框架即可实现全姿态功能,但不能隔离载体的角运动。
随着战略导弹取消滚动控制后弹体的角速度范围增大,以及控制系统体积和质量减小的现实需求逐渐明确后,需要研制新一代的具有小型化、全姿态、高精度的惯性系统。
2 速率平台系统的定义和优点
为克服位置平台系统和速率捷联系统的缺点,融合二者的优点,本文提出了满足战略导弹发展的新一代惯性系统——速率平台系统。
借鉴位置平台系统定义的表述方式,速率平台系统的定义为:利用速率陀螺仪测量台体角速率并以规定的方式控制框架以隔离载体角运动并实时解算台体姿态的平台系统。速率平台系统把速率捷联系统中陀螺仪输出为角速率有利于全姿态解算的优点与位置平台系统中框架隔离的优点进行了有效融合,并克服了速率捷联系统不能隔离角运动以及位置平台系统为实现全姿态而增加框架的缺点。
因此,速率平台系统有以下两个主要优点:
1)相较于三轴位置平台系统发生 “框架锁定”时的功能失效,速率平台系统可保证三轴平台物理隔离与数学解算相结合的全姿态导航功能。
2)相较于速率捷联系统中的三自捷联惯组不能隔离角运动的不足,速率平台系统可通过伺服回路的作用物理隔离载体的角运动,从而大幅度减小加速度计误差模型中与角运动有关的动态误差项。
根据以上对比,速率平台融合了位置平台和速率捷联的综合优势,可以认为是位置平台系统和三自捷联惯组的 “升级”。预计在未来5~10年内,速率平台将会成为惯性系统级技术的主流,如图2所示。
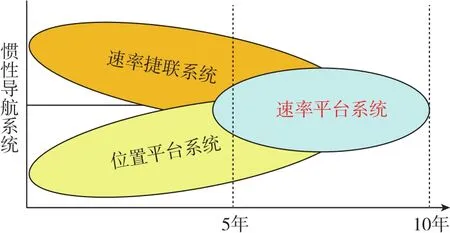
图2 惯导系统的发展趋势示意图Fig.2 Schematic diagram of the inertial navigation system development trend
3 速率平台系统的分类
速率平台具有小型化、全姿态的优势,填补了捷联系统与位置平台系统的型谱断代,包含速率平台系统后的惯性系统型谱如图3所示。根据结构特点,速率平台系统可分为三轴速率平台、双轴速率平台和单轴速率平台。
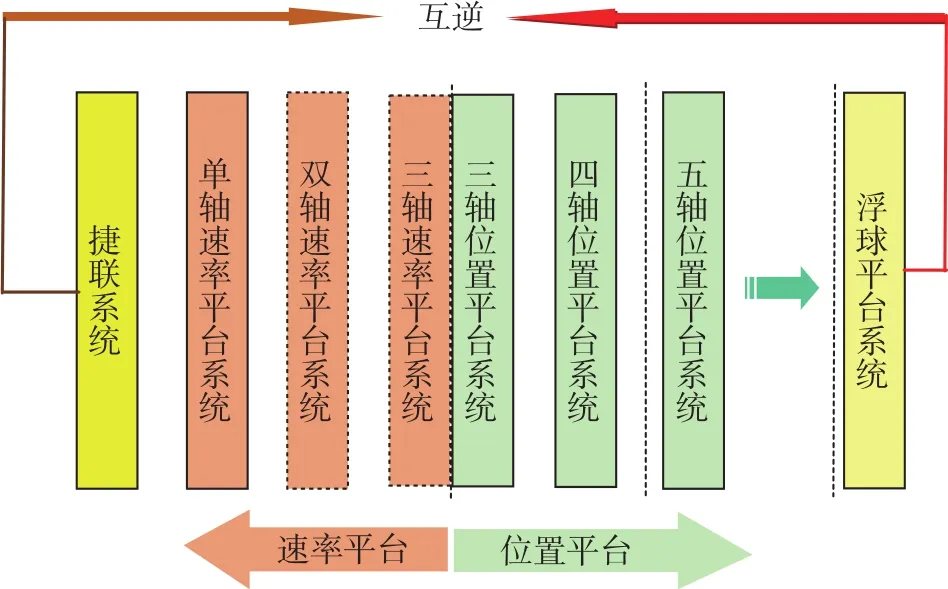
图3 惯性系统型谱Fig.3 Type spectrum of the inertial system
3.1 三轴速率平台系统
为实现台体始终稳定在惯性空间,传统的三轴位置平台系统需要信号分解器实现台体系到环架系的信号解耦和增益补偿。若采用空间信号分解器,由于对外环信号解耦时存在正割函数的作用,导致外环电机在内环大角度时需要输出足够大的力矩才能保证台体稳定在惯性空间。若采用平面信号分解器,虽对外环力矩无严苛要求,但是台体会发生随动,且内环处于特定角度时会发生分解奇异值导致解耦失效,台体不能稳定在惯性空间。
对于三轴速率平台系统,即便当台体没有稳定在惯性空间时,仍能由陀螺输出的角速率采用多变量解耦的方式实现无内环挡钉下的全姿态控制和全姿态导航。在控制过程中,增益补偿与解耦环节无奇异点,且对框架轴端力矩电机无苛刻要求。
3.2 简易速率平台系统
相对于三轴速率平台系统,把双轴速率平台系统和单轴速率平台系统归为简易速率平台系统:
1)双轴速率平台相较三轴平台虽然失去一个自由度,但体积和质量减小、成本降低,可以应用于无弹体旋转、低机动的场景[9]。
2)单轴速率平台仅有一个旋转自由度,典型应用就是低成本的高速旋转航空制导炸弹[10],优点在于克服了弹体高速旋转时固定采样频率引起的测量误差,并克服了由角速度引起的加速度计“尺寸效应”误差。
4 典型速率平台系统
4.1 光纤陀螺速率平台系统
光纤陀螺速率平台系统具有以下三方面优点:1)通过数学解算实现三轴平台的全姿态功能;2)根据任务的工作时间和应用场景的不同,可转换为不同稳定模式,如平台模式、捷联模式和旋转调试模式;3)克服了机电式陀螺仪加温时间长的缺点,有利于快速发射[11]。
4.2 三浮速率平台系统
对应三浮位置平台系统,能否基于三浮陀螺仪和三浮陀螺加速度计实现速率平台的功能?理论上,只需要将角位置输出转化为角速率输出即可,可以在三浮平台原伺服回路基础上增加一个三浮陀螺仪再平衡回路即可实现速率平台的功能,如图4所示为三浮速率平台系统伺服回路的改进原理图[12]。经过三浮陀螺仪再平衡内回路的信号反馈后,可以将角位置量转化为角速率,该角速率再作为平台伺服回路控制器的输入。改进之后的优势在于地面力反馈标定与飞行状态一致,不用四轴平台就可以实现全姿态功能。

图4 三浮速率平台系统伺服回路原理图Fig.4 Schematic diagram of three floating rate platform system servo loop
由于速率平台系统的台体相对惯性空间可以转动,三浮陀螺加速度计必须进行适应性改进,由原来的开环输出改为闭环反馈控制输出[13],如图5(a)和图5(b)所示。改进后的优点为:1)一个陀螺加速度计可以测量两个方向的视加速度;2)陀螺加速度计可以扩展应用于捷联系统。
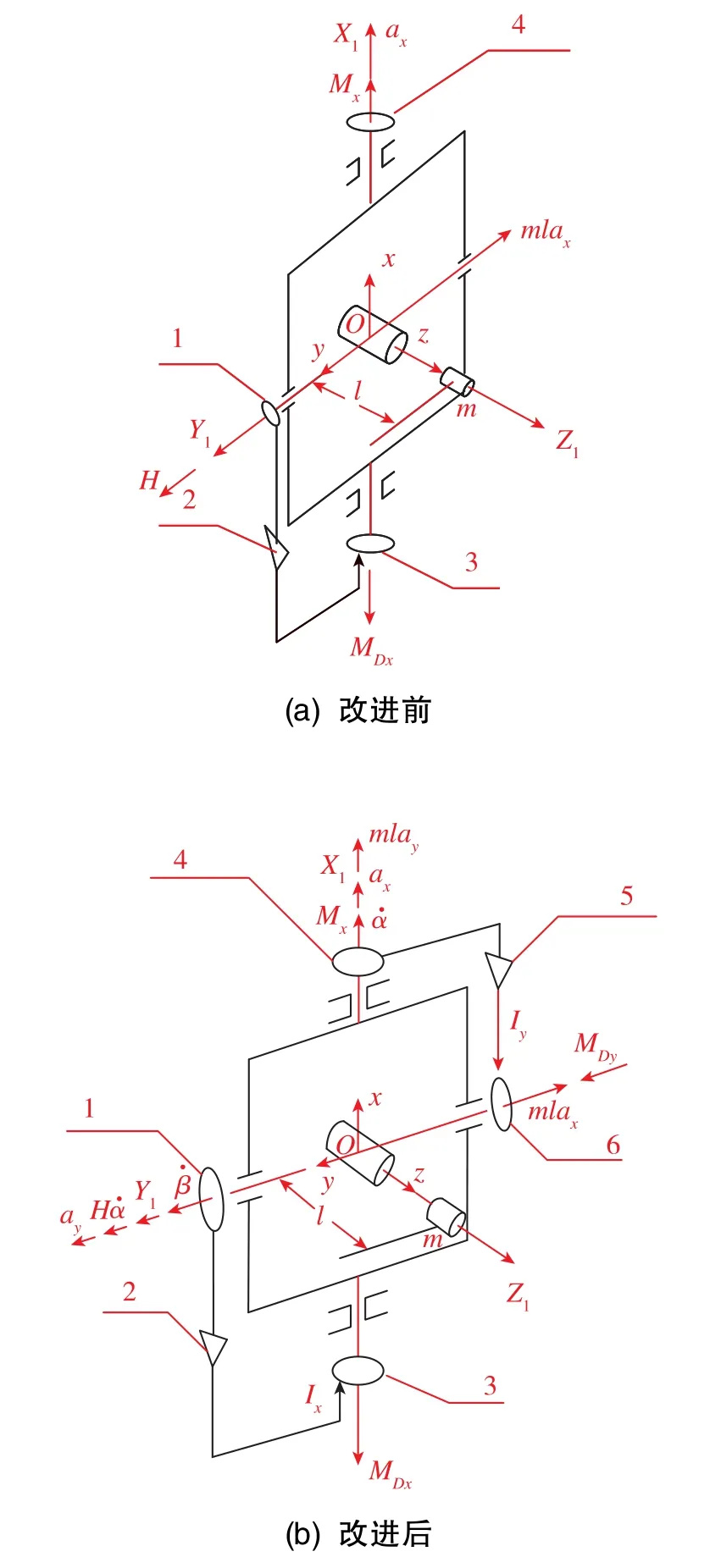
图5 陀螺加速度计改进前后原理图Fig.5 Schematic diagram of accelerometer before and after improvement
4.3 半球谐振陀螺速率平台系统
半球谐振陀螺有两种基本的工作模式:全角模式和力反馈模式。在全角模式下,谐振子可以随陀螺的旋转输入而自由进动,振动位置是速率的积分输出,通过检测振动位置可以直接得到角度信息。在力反馈模式下,通过一个附加的力信号抑制振子的进动趋势,使得振动固定在一个固定的位置,该信号的大小正比于输入的旋转速率,陀螺输出角速率信息。因此,可采用力反馈模式下的半球谐振陀螺仪作为伺服回路的角速度敏感元件以实现速率平台功能。
4.4 原子陀螺速率平台系统
随着原子陀螺仪原理样机的快速发展,基于原子陀螺仪的惯性系统逐渐受到关注。自旋式原子陀螺仪包括核磁共振陀螺仪和SERF陀螺仪。核磁共振陀螺仪是利用惰性气体核自旋磁矩来敏感物体转动的角速率;而SERF陀螺仪则是利用碱金属电子自旋磁矩偏转来敏感载体转动的角度。因此,只有核磁共振陀螺仪适合速率平台系统的工作模式,而SERF陀螺仪较适合位置平台系统的工作模式。
5 速率平台系统的新 “三自”技术
在自标定、自瞄准、自检测的原 “三自”功能基础上,为进一步提升速率平台系统的可靠性和智能化水平,使其具备自主导航、自主控制与自主重构的能力,旨在构建新一代智能惯性导航系统。
5.1 速率平台系统自主导航技术
在速率平台系统的环架上增加MEMS等小型化仪表,一方面,可以使 “冷冰冰”的平台框架变为可表达运动特征的 “有生命”的捷联系统;另一方面,可以通过多个小型化传感器实现惯性系统的大数据构建,有利于速率平台系统的自主导航信息冗余,如图6所示[14]。
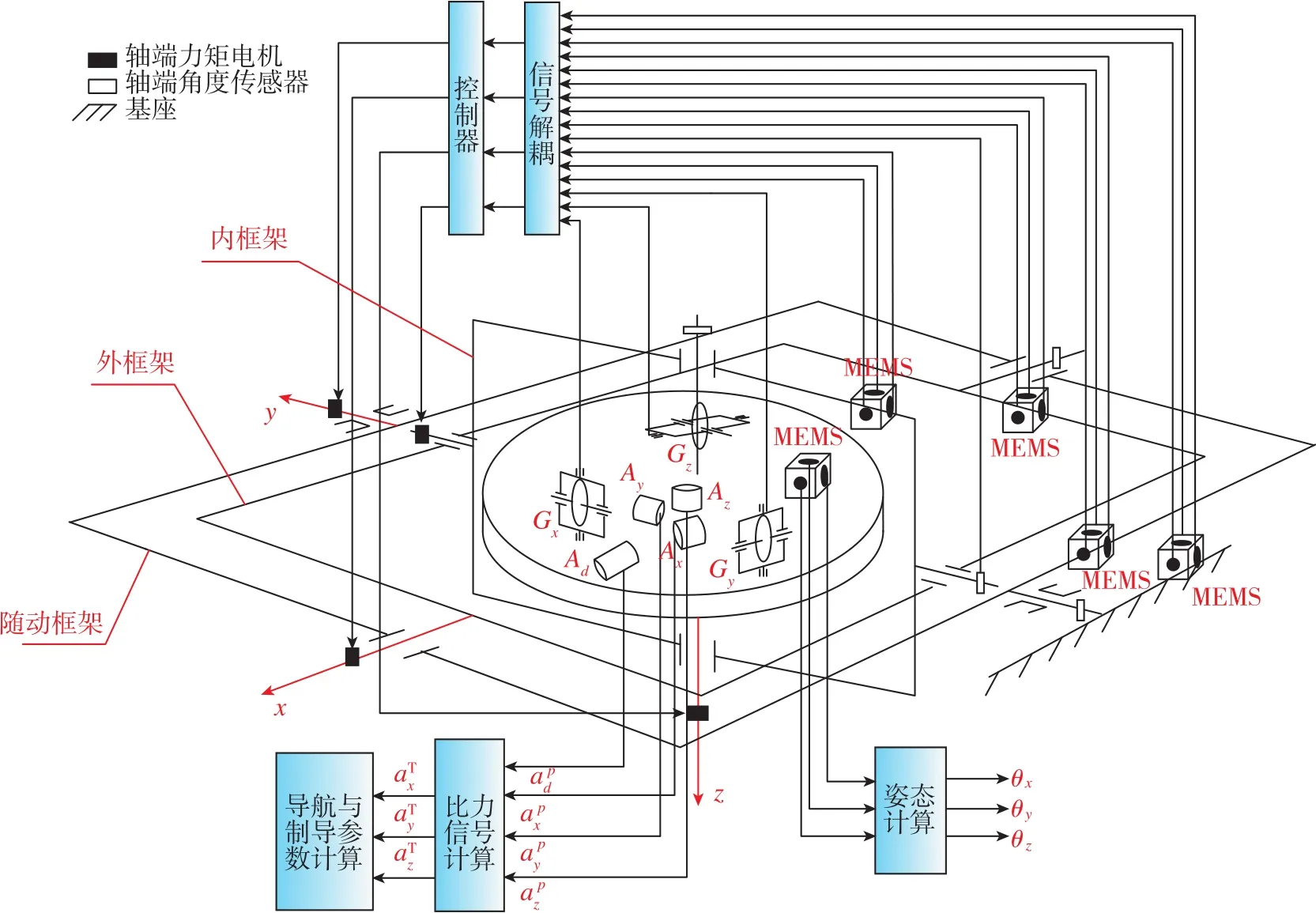
图6 基于MEMS仪表冗余配置的惯导平台系统示意图Fig.6 Schematic diagram of inertial navigation platform system based on MEMS instrument redundancy configurations
惯性测量系统可通过多信息冗余技术提升惯导系统的精度和可靠性[15],人工智能为实时、自主规划技术奠定了基础,通过建立台体和框架运动轨道规划的学习环境,应用深度强化学习方法开展惯性系统自主姿态规划模型的设计与训练,能够实现多轨迹复现,大幅度提升惯性平台系统的可靠性、自主化、多任务自适应能力和针对应急事件的响应速度。
5.2 速率平台系统自主控制技术
平台系统的台体、框架动力学特性会根据任务不同而姿态发生变化,且动力学特性的精确值往往难以预先进行准确估计,对平台伺服回路的控制带来问题和挑战。因此,平台系统需要能够快速、实时估算自身的系统模型并自适应调整控制模式和参数,最终实现复杂环境、复杂任务条件下的自适应控制。
5.3 速率平台系统自主重构技术
故障诊断与容错技术为提高航天器系统的可靠性和安全性开辟了一条新的途径[16]。惯性系统通过对比台体仪表的导航结果、各框架捷联系统的导航结果,通过选举算法可判断出器件故障模式。经过隔离故障器件或仪表后,实现不影响系统导航结果的目的。
6 结论
目前,位置平台系统和速率捷联系统分别发挥着各自不同的优势,但无法克服其各自的劣势,且在战略导弹武器应用中开始重叠。针对我国未来远程战略导弹提升突防能力、机动性的迫切需求,在比较位置捷联系统、位置平台系统和速率捷联系统的基础上,本文首次提出了一种可同时满足高精度、全姿态、小体积的新一代惯性系统——速率平台,其将速率捷联和位置平台两者的优势整合,是新一代惯导系统的发展方向。本文对速率平台系统的特点、分类、典型产品、应用领域以及新 “三自”功能等方面进行了分析和探讨,为推动我国远程战略导弹武器性能的跨越式发展提供参考建议。
