基于V2X的智能网联交叉口信号控制系统设计
2021-10-28万凌峰张心睿王润民
卢 涛,万凌峰,李 妍,张心睿,王润民
(长安大学 车联网教育部-中国移动联合实验室,陕西 西安 710064)
0 引 言
道路交叉口是城市交通的重要组成部分,在城市交通中发挥着至关重要的作用。但随着经济的快速发展,汽车数量急剧增加[1],导致交叉口交通每况愈下,车辆在交叉口处易发生交通拥堵、车辆碰撞等交通问题。根据美国的统计数据显示,信号交叉口的延误占总交通延误的5%~10%[2]。据统计,在中国城市道路交叉口发生的交通事故数约占交通事故总数的30%[3],城市交叉口已经成为制约城市道路通行能力的瓶颈之处。因此,对城市交叉口进行有效管理与协调,对保障行车安全、提高交叉口通行能力有着重要意义。
目前大多数交叉口采用信号控制方式控制各个进道口车辆的通行权,以达到减少交叉口的交通拥堵、降低交叉口碰撞事故发生率、提高交叉口通行能力的目的。但固定配时的信号控制往往与实际交通流量不符,使得交叉口通行效率低下,车辆延误时间反而增加。因此,信号配时设计不断优化,整体来说,信号控制经历了固定配时、感应控制和自适应控制的发展过程[4]。
在各种信号控制方式中,目前最优的控制方式为自适应控制[5]。自适应控制方法包含绿波带等方法,针对绿波带自适应控制,国内外学者进行了大量的研究,最早的有John D.C.Little提出的Maxband模型[6]和Gartner的MULTIBAND模型[7]。文献[8]参照NEMA相位优化的方法,优化MAXBAND核心数学模型,提出了基于灵活相位优化设计的双向绿波协调控制策略;通过对经典的双向绿波图解法进行优化,文献[9]提出了非对称相位相序方式下的双向绿波协调控制图解法。但是自适应信号控制系统中多采用定点采取数据的方式,获取的交通流数据有限且无法保证精准,而且车辆也无法充分利用交叉口信号灯的数据。
车联网,也称V2X[10](vehicle to everything),是解决交通问题的新兴技术,目前主流车联网技术为专用短程通信(dedicated short range communication,DSRC)和长期演进-Vehicle(long term evolution vehicle,LTE-V)。借助车联网,可以实现车与车、车与人、车与基础设施、车与互联网之间的通信,大大提高了交通信息的流通,有助于解决城市交通问题。DSRC在欧美国家使用比较广泛,而国内主要聚焦于LTE-V,相比于DSRC,LTE-V的覆盖范围更广,适应车速更大,但高速情况下延时较高[11-12]。
针对现有信号控制系统的不足,文中将车联网技术应用于交叉口,设计了一种基于V2X的智能网联交叉口信号控制系统。基于图形界面库Qt实现了车载终端应用程序的设计,基于python实现了路侧边缘计算机程序的设计,实现了将车、路融合为一个完整的系统,并构建了绿波车速引导、紧急车辆优先通行、左转辅助等三种典型应用场景对系统的有效性进行了测试验证。
1 系统总体架构设计
1.1 功能需求分析
交叉口作为城市交通的关键节点,对城市交通具有重大意义。目前多数交叉口采用固定配时的信号控制方式来控制交叉口各进道口的通行权,但现有的固定配时方式无法适应动态变化的交通流,因此亟需一种可以动态改变信号配时的控制方案。另外,交叉口拥有复杂的交通状况,包含机动车辆、非机动车辆、行人等诸多要素,交通事故及交通拥挤等交通事件频发,为此需要一种可以检测交叉口碰撞风险、提高交叉口通行效率的智能交叉口信号控制系统。
针对上述问题,文中借助车联网技术和边缘计算,实现交叉口信号控制系统的网联化和智能化,设计需要满足的具体需求如下:
(1)红绿灯与行驶车辆的实时网联交互;
(2)车载端可以进行信息采集、数据实时处理与行车预警提示;
(3)路侧端可以进行信息采集、数据实时处理、检测交叉口潜在的碰撞风险与修改信号灯状态;
(4)网联车辆上提供人机交互接口。
1.2 系统总体架构设计方案
基于上述需求分析,文中设计了一种智能网联交叉口信号控制系统,系统模块组成如图1所示,主要分为网联汽车子系统和智能红绿灯子系统。网联汽车子系统由人机交互、车载计算和信息通信模块组成;路侧子系统由信息通信、路侧计算和信号控制等模块组成。
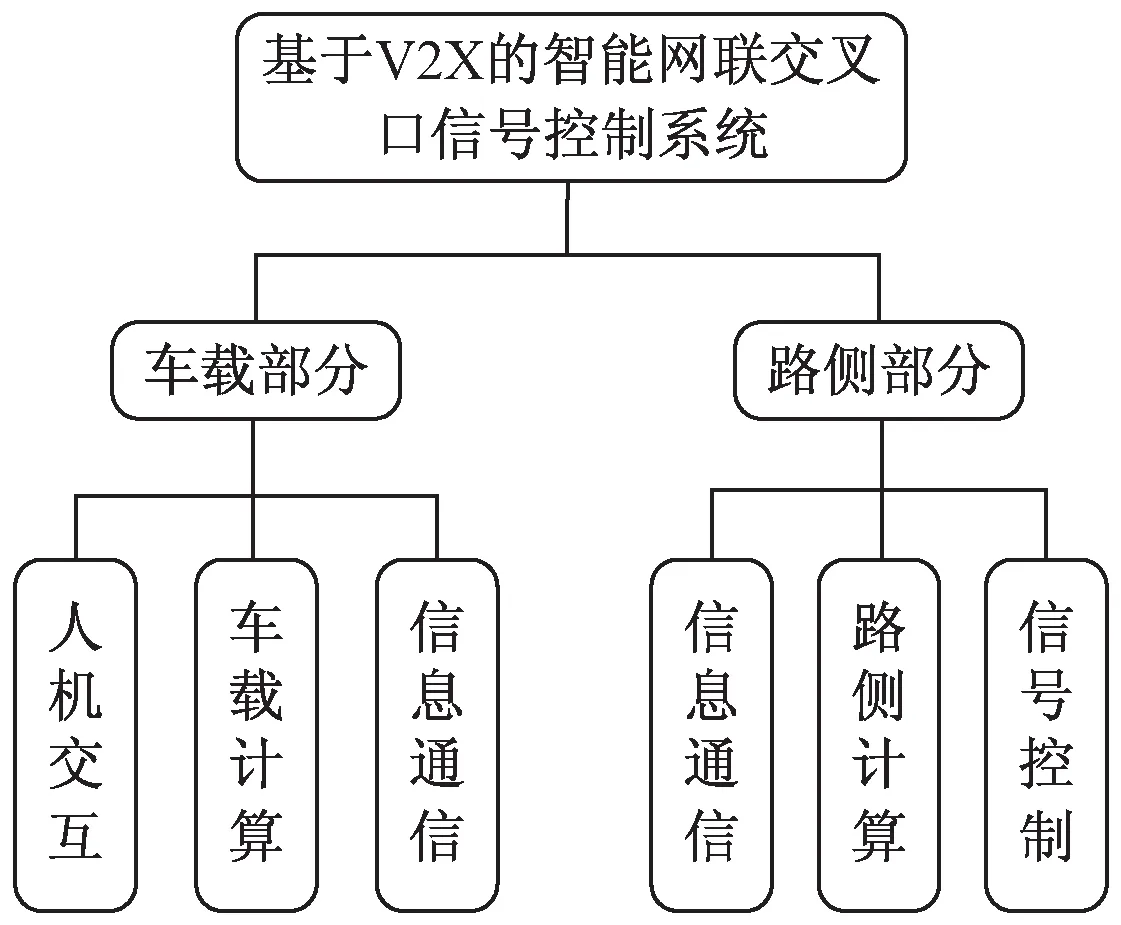
图1 系统模块组成
网联汽车子系统主要完成信号灯信息的展示以及碰撞预警。其中人机交互模块使用车载交互终端以图像、声音等方式来向用户展示信息和预警提醒。车载计算模块使用车载计算机解析并处理信息通信模块传输来的数据,然后利用处理后的数据实现一定的业务逻辑。信息通信模块实现与路侧端的V2X双向通信和本地网络通信,以及GPS/北斗定位。
路侧子系统主要完成交叉口潜在碰撞风险的检测以及信号灯状态的动态修改。路侧计算模块使用路侧边缘计算机解析处理信息通信模块传输来的数据,利用处理后的数据检测碰撞风险和改变信号灯状态。信号控制模块主要用于控制交叉口信号灯相位和配时的改变,同时可以上报信号灯的状态信息给路侧边缘计算机。信息通信模块实现与车载端的V2X双向通信和本地网络通信,以及GPS/北斗定位。
基于上述模块实现的整个系统的框架如图2所示,主要包含三层:硬件层、网络层和应用层。硬件层包含安装在车辆和交叉口的一些设备;网络层为信息传输的通道,有V2X、以太网、4G/5G等;应用层为基于场景开发的应用功能,包含车载端和路侧端。
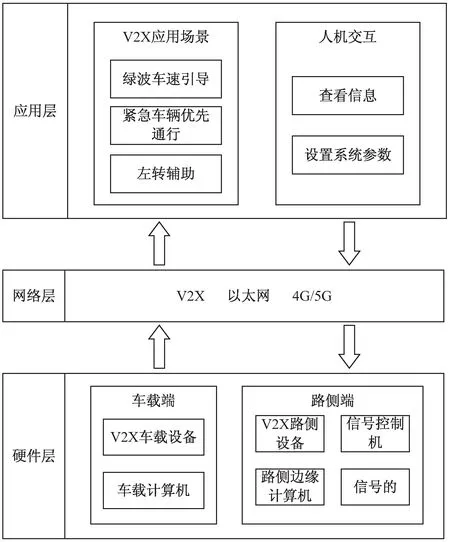
图2 系统体系框架
1.3 系统功能场景设计
基于上述需求分析,文中通过搭建双向两车道十字型交叉口场地,设计了三种典型应用场景,具体如下:
(1)绿波车速引导。
绿波车速引导(green light optimal speed advisory,GLOSA)是指,当装载系统应用的车辆驶向信号灯控制交叉口,收到由网联信号灯实时状态数据。GLOSA应用将给予驾驶员一个建议车速区间,车辆按建议车速能够经济、舒适地通过信号路口。
(2)紧急车辆优先通行。
紧急车辆优先通行(emergency vehicle priority,EVP)是指,紧急车辆在驶向交叉口的过程中,向外广播紧急车辆的信号,交叉口信号灯系统收到紧急车辆信号后,根据紧急车辆的信息以及信号灯的状态信息计算出可以使紧急车辆优先通过交叉口的信号灯信息,然后通过改变交叉口信号灯的相位和配时来使紧急车辆尽快通过。
(3)左转辅助。
左转辅助(left turn assist,LTA)是指,车辆A在交叉口左转,与对向驶来的冲突车B存在碰撞危险时,LTA应用将对车辆A驾驶员进行预警。
2 系统硬件设计
2.1 系统硬件设计
系统硬件连接如图3所示,车载计算机通过RJ45接口与V2X车载终端相连,WiFi模块和多模式组合天线通过FAKRA接口与V2X车载终端相连,车载终端通过V2X网络与路侧设备相连,路侧边缘计算机和V2X路侧设备、摄像头、交通信号控制机连接采用RJ45接口。
正常情况下,交通信号控制机周期性地将信号灯的相位和配时信息上报给路侧边缘计算机,路侧边缘计算机通过V2X路侧设备将信号灯信息发送给V2X车载终端,车载终端将车辆信息和信号灯信息传送给车载计算机,车载计算机根据车辆数据和信号灯数据计算出绿波车速,然后将信号灯信息和绿波车速在人机交互终端上呈现给驾驶员。
当车辆为紧急车辆时,驾驶员通过在人机交互终端上设置参数,然后通过车载终端发送给路侧端,路侧边缘计算机识别出紧急车辆信号后,根据车辆和信号灯的状态计算出紧急车辆通过交叉口的时间,然后修改信号灯的相位和配时,以便紧急车辆优先通过交叉口。
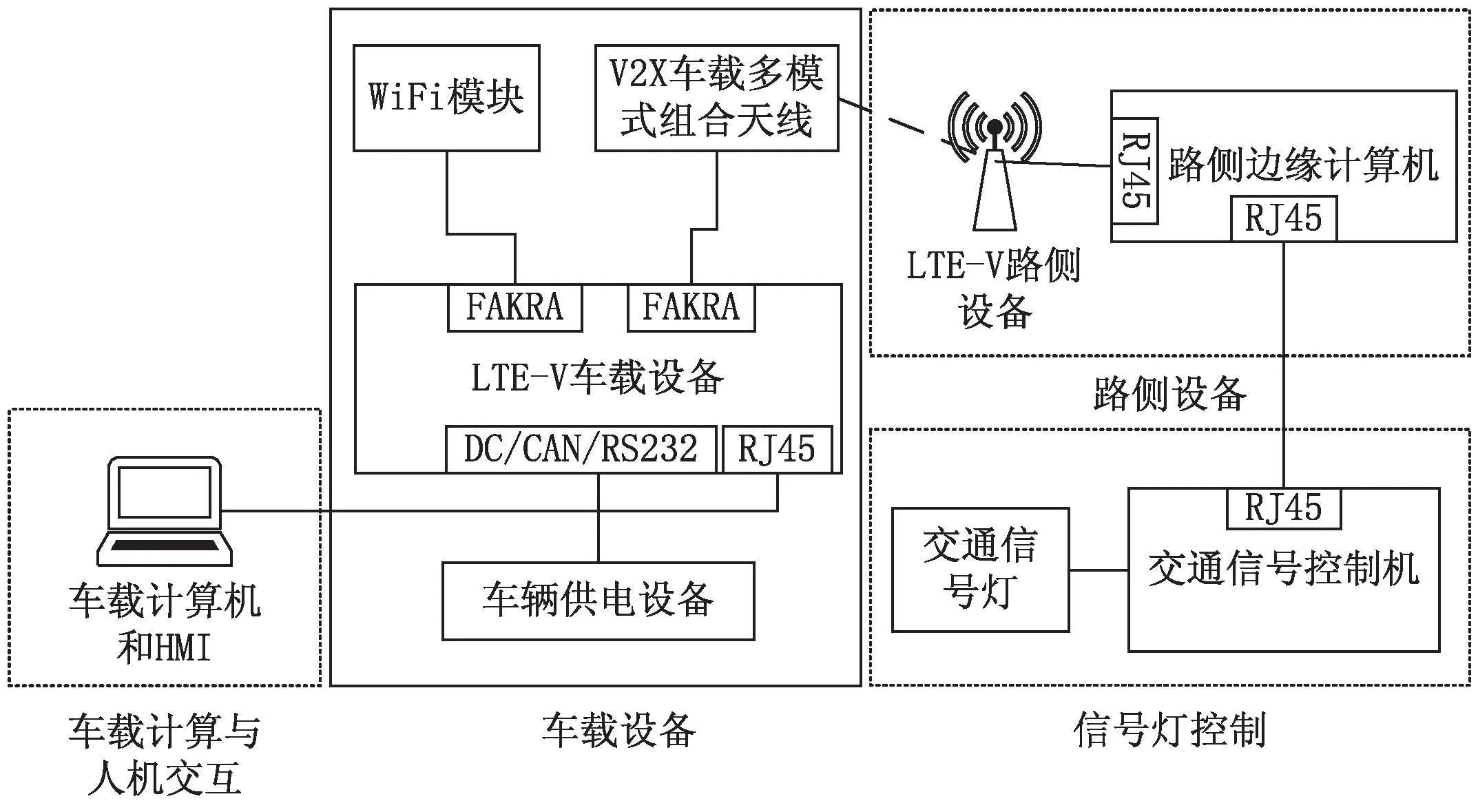
图3 系统硬件连接
2.2 网联汽车子系统硬件选型
网联汽车子系统的硬件主要包含网联汽车、V2X通信终端、车载天线、车载计算机与人机交互终端。车载天线置于车辆顶部,用于实现北斗定位和V2X通信数据收发;V2X通信终端、车载计算机、车载电源置于车内,车载终端接收V2X通信信息并将其传送给车载计算机;车载计算机解析接收到的V2X数据、北斗定位数据并处理,最后人机交互终端上展示信息;其中车载电源负责给车载终端和车载计算机供电。
其中V2X通信终端选用星云互联的智能车载终端,该设备支持CAN/RS232/Rj45/USB等接口,可以很好地与第三方设备连接测试,其技术规格如表1所示。车载计算机选用ThinkPad X280笔记本;车载天线为鱼鳍天线。
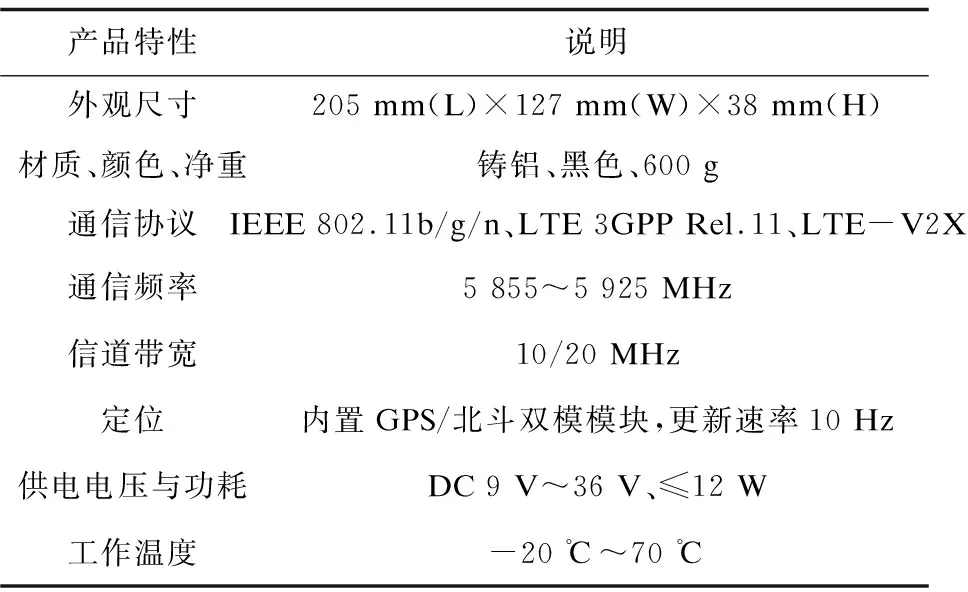
表1 星云互联智能车载终端技术规格
2.3 智能信号灯子系统硬件选型
路侧端的硬件主要包含V2X路侧终端、路侧边缘计算机、信号控制机、卫星定位模块和三相位信号灯。V2X路侧终端负责收发V2X数据;路侧边缘计算机负责数据的解析和处理,检测交叉口可能存在的碰撞风险,也可以通过向信号控制机发送控制指令控制改变信号灯的状态;信号控制机负责控制信号灯状态。
其中V2X路侧单元设备型号与车载V2X设备型号相同,路侧边缘计算机选用的是研华ARK-3500工控机。图4(a)示出了信号控制机外观。图4(b)为信号灯的内部硬件电路图,主要分为5块电路板和其他电路,其中电路板1负责信号灯的逻辑控制以及和外界的通信,电路板2~4为信号灯的驱动电路,分别对应交叉口的东西南北四个方向。
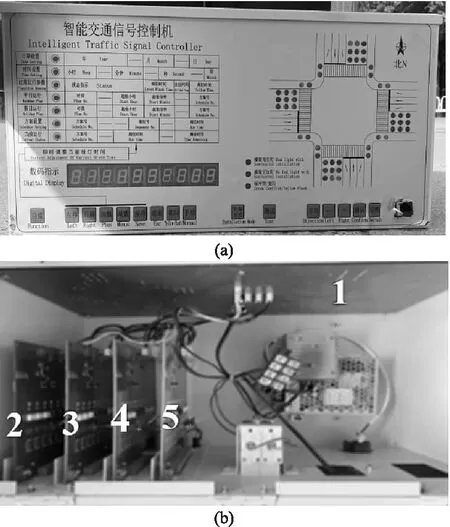
图4 信号控制机外观(a)与信号控制及内部电路(b)
3 系统软件设计
软件系统包含车载端软件和路侧端软件。两者相互独立又相互关联,一起协同完成各个场景。
3.1 车载端软件
车载端软件主要接收路侧端传送的数据,然后对数据进行解析和处理,在界面上给出绿波车速,并更新信号灯状态和地图上车辆的位置。
软件框架如图5所示。I/O层包含无线消息服务,主要负责与V2X设备通讯,实现无线数据的收发和安全认证,主要使用TCP/IP协议。服务层负责对输入数据的整合、处理, 并分发至应用层,同时为应用层提供数据发送的接口,由人机交互接口、无线消息处理和硬件信息处理三个模块组成。无线消息处理模块主要负责无限消息的接收及编解码等处理工作,同时为应用层提供无线数据发送的接口;硬件信息处理模块主要负责解析获取信号灯和车辆的状态信息,并计算车辆距离的信号灯和其他车辆的距离;应用层包含应用场景和第三方应用两大模块,应用场景模块包含常见的绿波车速引导、紧急车辆优先通行、左转辅助、闯红灯预警、交叉口碰撞预警等。各场景相互独立,互不干扰,具有很好的扩展性。同时支持用户自定义的第三方应用,比如用户自定义的语音、视频应用等,与原有应用也相互独立。
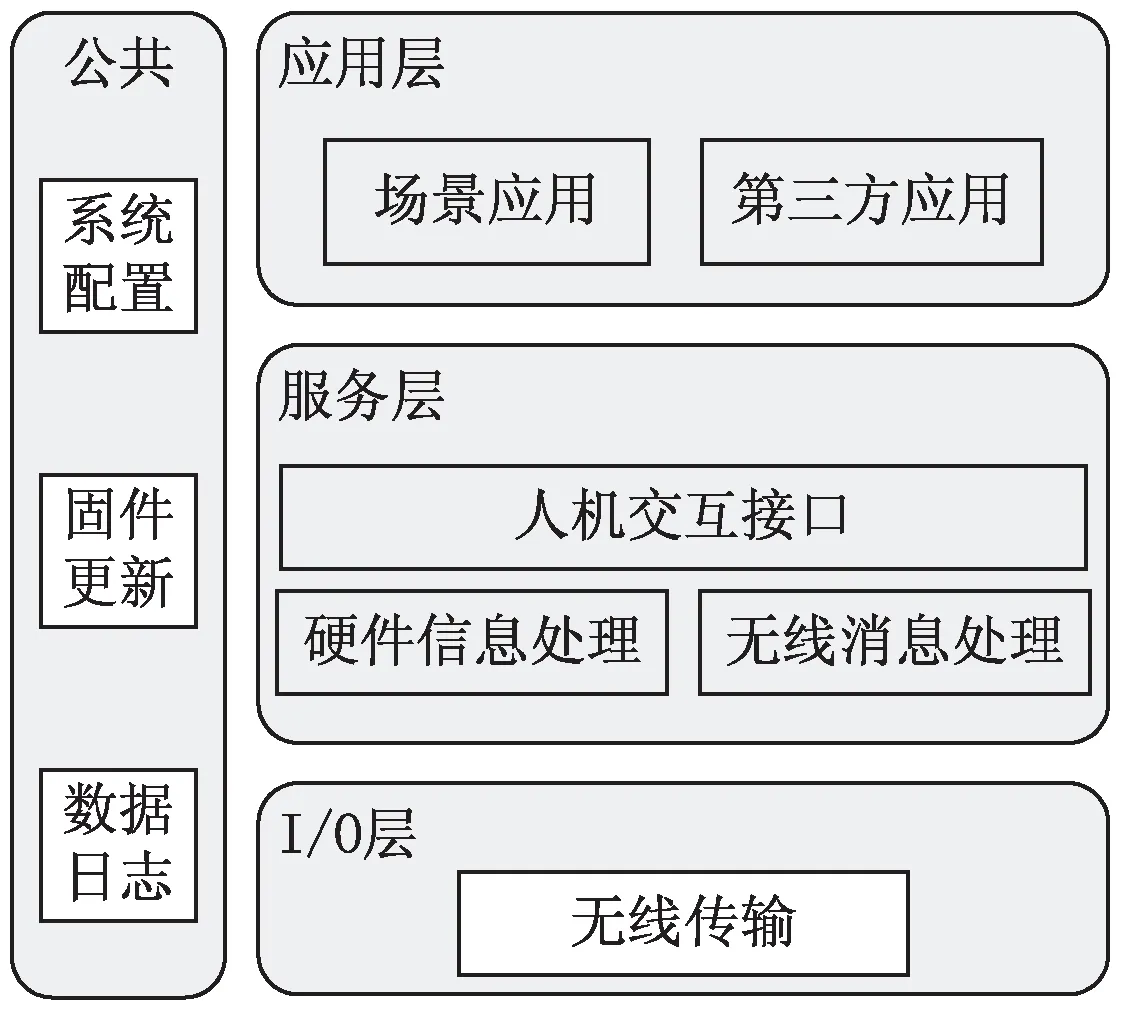
图5 车载端软件框架
车载端软件界面主要利用数据传输和存储技术、移动互联网技术及Qt桌面开发技术,界面左侧为地图,地图上会标注并实时更新自身车辆的位置;右上角为实时的交叉口红绿灯状态信息,包含相位和倒计时;右下角为推荐通过交叉口的绿波车速;驾驶员通过菜单栏的模式可以切换车辆类型为紧急车辆。软件共实现了绿波车速引导、紧急车辆优先通行和左转辅助3个场景。
3.2 路侧端软件
路侧端软件主要向车辆提供信号灯的状态信息以及自身的位置信息等。图6所示为路侧端软件框架。相对于车载端软件框架,路侧端软件框架应用层缺少了第三方应用,整体架构多了关于数据存储的部分,用于把一些重要的数据保存到数据库,方便后期进行数据分析。

图6 路侧端软件框架
3.3 系统软件工作流程
系统工作流程分为车载端软件工作流程和路侧端软件工作流程,两者通过V2X网络进行信息传递。
车载端软件运行后开始接收路侧端发送的数据并检测自身是否为紧急车辆,若为紧急车辆,则向外广播“emergency”紧急信号;若不是,则一直自检是否为紧急车辆。当接收到数据后,解析判断是否存在预警信息,若存在,通过弹窗和语音播报的形式提醒驾驶员,然后计算绿波车速并展示信号灯信息和绿波车速给驾驶员。
路侧端软件运行后检测是否接收到“emergency”紧急信号,若存在,则控制号灯改变,以便紧急车辆优先通行;软件会不断检测是否存在潜在的碰撞风险,若存在,则向车载端发送预警信息。
4 系统测试与验证
4.1 系统集成
图7(a)展示了测试车辆内部设备连接及设备摆放位置,V2X车载终端置于车内,V2X多模式组合天线置于车顶。图7(b)为信号灯硬件连接图的实物图。设备启动后,红绿灯开始工作,V2X车载终端和路侧单元LCD等闪烁正常,系统开始正常工作。
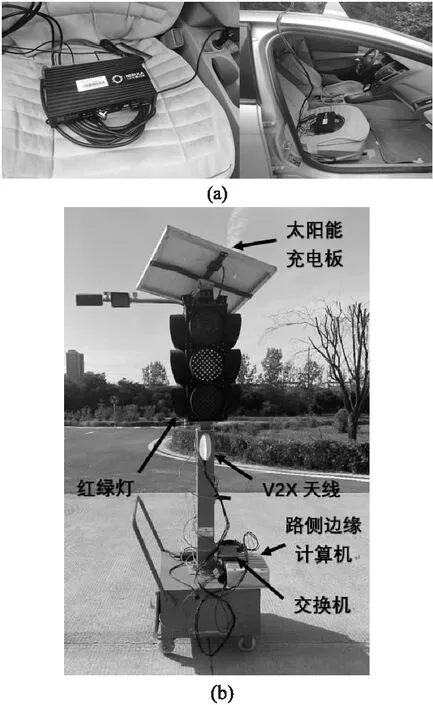
图7 车载设备连接实物图(a)与信号灯 硬件连接实物图(b)
4.2 系统测试环境搭建
测试场地选用的是长安大学车联网与智能汽车试验场,测试选用如图8中交叉口,其中AB段为东西方向,长约300米,2车道,车道宽4米,CD段为南北方向,长约90米,2车道,车道宽4米,点S是交叉口交汇点,即信号灯放置位置。
在测试过程中驾驶员负责驾驶,测试人员位于车辆后排位置,负责测试软件启停及数据保存,硬件设备工作状态监视。
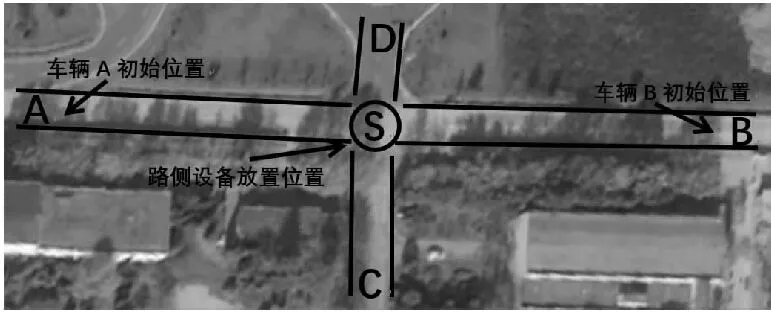
图8 长安大学车联网与智能汽车试验场鸟瞰图
4.3 测试过程
(1)绿波车速引导。
将搭设好V2X车载设备的测试车辆驶入测试场地,移动信号灯放置于交叉路口,待检查设备工作正常后,将测试车辆停放在距离交叉口信号灯300 m处[13],车头朝向交叉口信号灯。待硬件设备以及测试软件启动后,测试车辆缓慢驶向交叉口。图9为实际测试画面和测试软件运行界面。

图9 绿波车速引导测试过程(a)与软件界面(b)
在行驶过程中,测试人员观察软件界面上显示的信号灯信息(相位、配时等)是否与交叉口信号灯一致,以及测试车辆按照推荐速度是否能不停车通过交叉口。若信号灯信息一致且车辆不停车通过交叉口,则此次测试通过;反之,不通过。在整个测试过程中,网联车辆和普通车辆分别测试50次,测试人员记录每次测试车辆的旅行时间以及此次测试成功与否。
(2)紧急车辆优先通行。
将搭设好V2X车载设备的测试车辆驶入测试场地,移动信号灯放置于交叉路口,待检查设备工作正常后,将测试车辆停放在距离交叉口信号灯150 m处,车头朝向交叉口信号灯。硬件设备以及测试软件启动后,等待信号灯变为红灯,测试车辆缓慢驶向交叉口。在行驶过程中,测试人员通过测试软件向车载设备发送救护车紧急信号,然后观察信号是否由红灯变为绿灯。若交叉口信号灯的变化符合预期,则测试通过;反之不,通过。测试过程中,测试人员记录此次测试成功与否,共测试50次。图10为实际测试画面和测试软件运行界面。

图10 紧急车辆优先通行测试过程(a)与软件 操作界面(b)
(3)左转辅助。
将两辆搭设好V2X车载设备的测试车辆驶入测试场地,移动信号灯放置于交叉路口,待检查设备工作正常后,将测试车辆停放在距离交叉口信号灯相对路口的100 m处,两辆车的车头朝向交叉口信号灯。硬件设备以及测试软件启动后,等待东西方向上信号灯变为绿灯,测试车辆缓慢驶向交叉口。在行驶过程中,左转车辆上的测试员观察在驶进交叉口后,测试软件界面上是否出现预警提示或者语音播报提示驾驶员可能发生碰撞,若出现预警,则测试通过;反之不通过。测试过程中,测试人员记录此次测试成功与否,共测试50次。
图11为实际测试画面和测试软件运行界面。
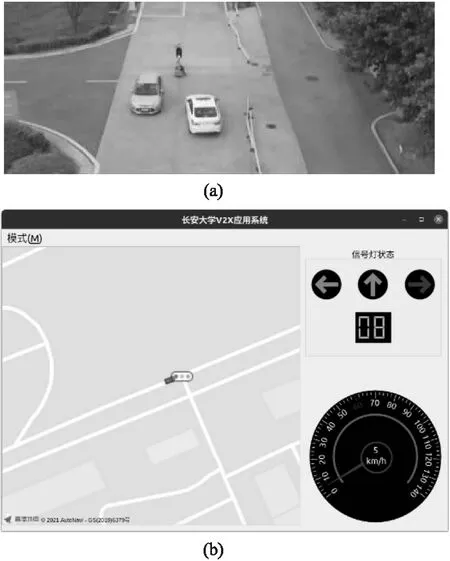
图11 左转辅助测试过程(a)与软件预警界面(b)
4.4 测试结果
经测试,系统实时性好、稳定可靠。绿波车速引导场景能够在路侧设备通信范围内实现人机界面上的信号灯状态显示,并给出通过交叉口的绿波车速,引导驾驶员在绿灯时间内通过交叉口,经测试,采用GLOSA应用,成功率达到99%以上,交叉口通行效率可以提高25%以上;紧急车辆优先通行场景能够在紧急车辆进入路侧设备通信范围内时,及时调整信号的状态以便紧急车辆快速通过,经测试,采用EVP应用,可以有效提高紧急车辆通行交叉口的效率,成功率高达98%;左转辅助场景能够在两辆相向而行的车辆进入交叉口时,如果检测到潜在的碰撞危险,则对左转车辆进行预警,以便优先让直行车辆通行,经测试,采用LTA应用,可以有效避免交叉口的左转碰撞,有效率高达95%。
5 结束语
针对城市交叉口中交通事故频发、通行效率低的问题,结合车联网技术,文中设计了一种基于V2X网络的智能网联交叉口信号控制系统,包含硬件和软件两部分;并在长安大学车联网与智能汽车试验场进行了实车测试。
经测试,基于该系统开发的应用可以使交叉口信号控制系统更加智能化,可以有效减少交叉口的车辆延误时间,降低交通事故的发生概率。
目前该系统还存在很多问题。例如文中测试的场景为单车或双车,并未测试复杂、饱和交通流状态下的情况,以及通信延迟比较大的情况。针对复杂的交通流,可以采用更加复杂的算法实现交叉口的智能化[14-15];针对通信延迟比较大的情况,可以结合预测算法来获取下一时间段内的数据信息[16]。
