主动航天服关节助力外骨骼结构设计及优化
2021-10-26李照阳戴跃洪胡杰俊王君尧
李照阳,戴跃洪,2,*,胡杰俊,王君尧
1. 电子科技大学 航空航天学院,成都 611731 2. 飞行器集群智能感知与协同控制四川省重点实验室,成都 611731
1 引言
随着嫦娥五号任务的圆满成功以及火星探测器“天问一号”的成功发射,中国成功地迈出了行星探测的第一步。与此同时,越来越多的人憧憬着载人星表探测的梦想能够早日实现[1-2]。与传统的太空作业不同,未来的星表探测作业要求航天服上下肢关节系统都具备良好的运动性和灵活性,以便完成星表行走、样品采集、设备维修和物资搬运等工作。在工作过程中,航天服由于压力防护存在内外压差,导致航天服关节运动时会产生明显的阻尼力矩,从而增加宇航员的体能消耗,影响未来星表探测任务的开展[3],因此有必要研究一种能够提高航天服关节活动性能的助力结构设计方案。
近年来,为了提高航天服的活动性能,国内外研究学者相继提出了机械反压[4]、等张力体软式关节[5]、硬式髋关节[6]、并联式肘部助力结构[7]以及宇航员专用X1下肢助力外骨骼[8]等方案。上述方案对材料要求较高,且仅能实现局部助力。我们根据对国内外航天服结构的分析以及对力量增强型外骨骼技术的研究,提出了主动航天服设计方案,即在现有航天服的基础上融合先进的外骨骼机器人技术,使宇航员—航天服—助力外骨骼系统成为高度人—服—机耦合的复杂力量增强型随动系统[9]。主动航天服的作业系统由人体运动规律建模子系统、机械结构子系统、动力传动子系统和感知控制子系统组成,可以帮助宇航员安全、快捷、高效、省力地完成各种星表探测任务。
目前,对于宇航员的助力研究,主要集中于对宇航员上肢和手套的助力,如Villoslada[10]等提出了一款柔性机械手(a soft hand exoskeleton),缓解宇航员太空作业时的手部疲劳。张沛[11]等提出了舱外航天服上肢助力外骨骼,消除舱外航天服关节阻尼力矩对宇航员舱外作业的影响。崔翔[12]等提出了基于肌电信号的肘关节助力外骨骼,解决由于航天服隔离外骨骼系统与人体所造成的人机运动协同问题。随着星表探测任务需求不断增加,星表行走、物资搬运以及长距离车辆驾驶均对宇航员下肢活动能力提出了更高的要求。我们曾提出了一种航天服下肢助力外骨骼设计方案[13],并对外骨骼结构动力学及运动控制算法进行了研究。为了满足宇航员未来任务需求,我们所设计的主动航天服将对宇航员上下肢关节系统均提供助力,并且通过调整控制参数实现对不同重力环境、不同任务动作及不同负载变化时的关节助力。
本文提出一种应用于航天服的关节助力外骨骼结构方案,协助宇航员完成未来舱内外操作任务。在对第一代外骨骼样机结构优化的基础上,建立第二代外骨骼样机的设计模型,结合有限元软件分析,进一步优化第二代关节助力外骨骼结构尺寸,对比优化结果,以验证结构优化方案可行性。
2 样机设计
与地面用的外骨骼不同,本文提出的关节助力外骨骼是放置在航天服外部,主要用于克服航天服关节部位的阻尼力矩。当确定外骨骼关键结构的仿生参数时,需首先分析航天服上下肢各组成部分(如大臂、大腿等)输出端的运动形式及运动空间等相关参数,确定外骨骼各关节的自由度分配及对应关节的运动范围,从而完成外骨骼结构的初步设计。另外,由于真正的航天服属于高价值装备,因此只能定制一套尺寸相仿的模拟航天服,利用干式潜水服模拟航天服的充压环境。同时,关节助力外骨骼要在结构上与人体肢体类似,且符合人体基本运动规律,从而满足外骨骼的可穿戴性要求。因此,拟将上肢机构的一侧简化为一个3自由度、多刚体串联的系统,下肢机构的一侧简化为5自由度系统。根据人体生理结构的特点,矢状面的屈曲/伸展是人体主要的运动形式,消耗的能量较大。同时为减小因末端质量的增大所导致的能量消耗增加[14],仅选择在肩关节、肘关节、髋关节和膝关节矢状面的屈曲/伸展方向安装驱动电机,实现主动助力,其余关节表现为从动形式。关节助力外骨骼的自由度配置具体方案见表1,外骨骼的第一代样机结构如图1所示。

图1 关节助力外骨骼第一代样机结构Fig.1 Structure diagram of the first-generation prototype of the joint-assisted exoskeleton
由图1所示,第一代样机主要采用贴合式穿戴方式,即外骨骼可以作为一个整体穿戴在航天服外侧,可实现与航天服的快速穿脱。其中,U型挡板是可拆卸的,方便航天服与外骨骼之间的固定。各关节之间的连杆长度是可调的,通过调整螺孔位置以适应不同宇航员。外骨骼的脚部存在一个自由度,用于模拟人体脚底的局部运动。外骨骼手臂末端的弯钩主要用于协助宇航员提拉重物。
3 结构优化
3.1 模型设计
在使用过程中,第一代外骨骼样机暴露出诸多问题。首先是第一代样机整体质量达到24.835 kg,并不适合未来载人航天;U型挡板安装与拆卸过程复杂,且极易与航天服发生运动干涉,对航天服造成磨损;通过螺孔位置改变从而调整连杆长度,不符合人机工程学;仅通过背带使外骨骼与宇航员固定,当外骨骼负载过重时,会出现重心后移现象,极易造成宇航员向后摔倒。基于以上原因,第二代外骨骼的结构设计需使宇航员—航天服—外骨骼之间的相互干涉情况最小,且本体结构要轻巧、安全、可靠、坚固和耐用。所以拟定了以下设计目标:1)外骨骼整体质量≤15 kg;2)最大负载能力≥30 kg(地面);3)选用强度高且高低温性能较好的加工材料;4)满足不同身高宇航员的需求。基于以上的设计目标,对关节助力外骨骼进行了以下方面的改进,改进后的第二代关节助力外骨骼结构设计模型如图2所示。
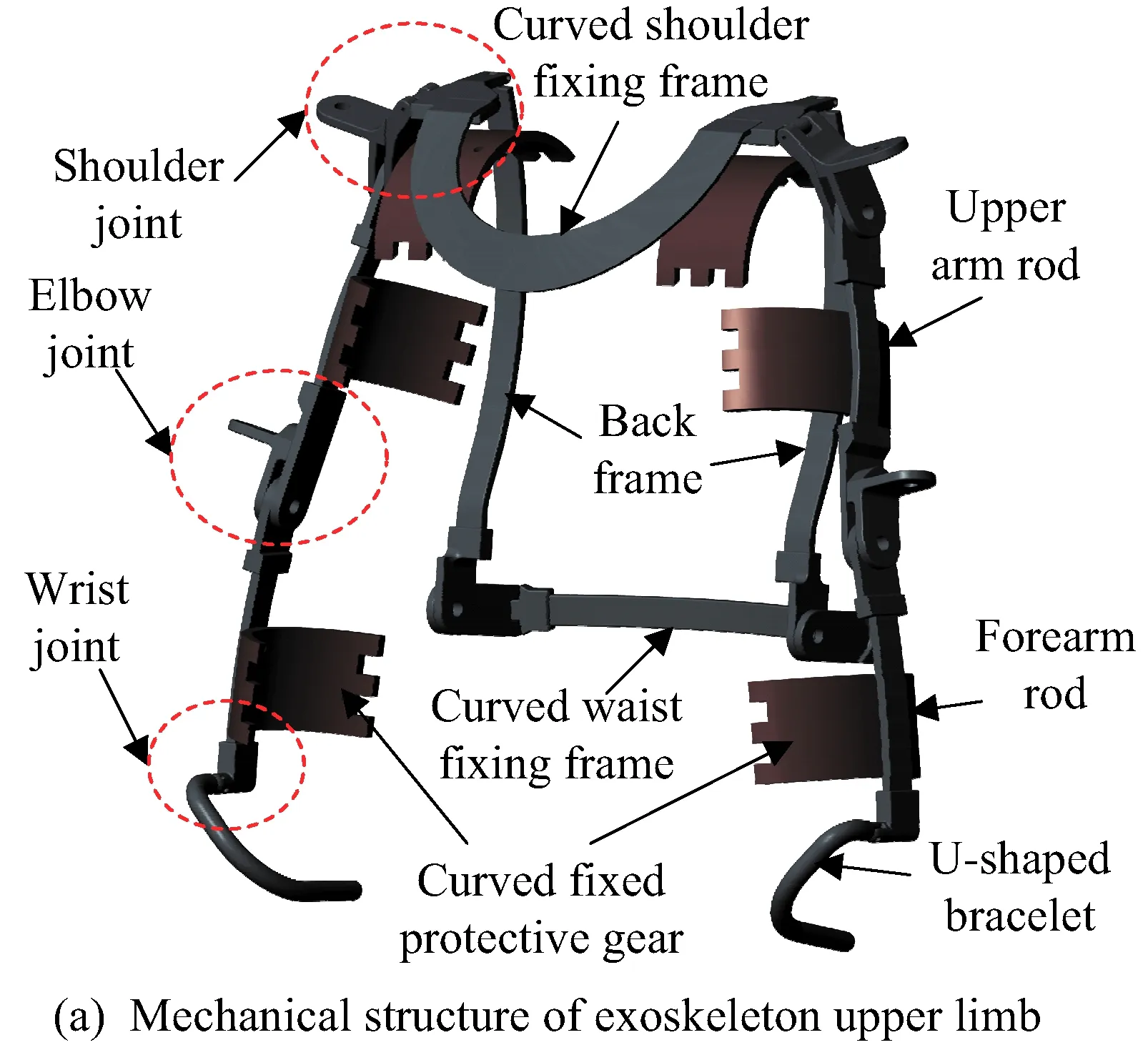
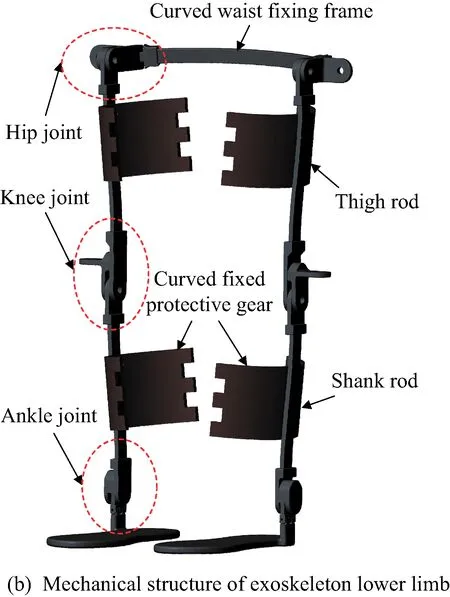
图2 关节助力外骨骼第二代结构设计模型Fig.2 The second-generation structure design model of the joint-assisted exoskeleton
1)增加了弧形肩部固定架,避免因外骨骼重心后移而摔倒,提高了主动航天服穿戴的稳定性。
2)各连杆被设计成具有弧度且可替换,使其结构与航天服更加贴合,且适应不同身形的宇航员。
3)减小外骨骼背部质量,将背板简化为背架;背架与弧形肩部固定架存在一个旋转自由度,方便宇航员快速穿戴外骨骼,且减少背带使用。
4)用轻质弹性弧形固定护具替换U型挡板,优化固定方式,增加穿戴舒适度。
5)用U型手环替换弯钩,宇航员既可以用来固定外骨骼末端,减少抖动,又可以用来提拉重物。
6)调整自由度配置方案。将肩关节内旋/外旋自由度调整为内收/外展自由度;将髋关节内收/外展自由度调整为内旋/外旋自由度;并且在腕关节处增加了一个旋转自由度,使得宇航员的手部可以更加灵活地活动。
7)进一步减小外骨骼各杆件的尺寸,减轻关节助力外骨骼整体质量。
3.2 受力分析
需要分析第二代外骨骼上下肢运动时的受力情况,得出两者受力较大的运动姿态,为外骨骼结构静力学分析做好理论依据。对于下肢运动分析,人体行走周期可分为支撑相和摆动相,而且随着运动速度和重力环境的不同,支撑相的占比会发生明显变化[15]。将人体行走分为三种状态:站立、单腿支撑和双腿支撑,如图3所示。设外骨骼弧形腰部固定架及以上部件总质量为G1,外骨骼左、右下肢质量分别为G2、G3,腰部负载质量为F。站立时下肢与身体冠状面存在一个微小的前倾角,通过力学分析,得到不同行走状态下的脚底分力F2x,F2z。

图3 下肢受力简图Fig.3 Force diagram of lower limb
通过计算分析,可以得出在人体双腿支撑时,腿杆所受的负载最小;而在人体单腿支撑时,外骨骼腿杆和各个关节受到的作用力最大,故选取脚底受力最大的单腿支撑状态进行有限元静力学分析与校核。而对于上肢的运动分析,星表探测时上肢主要完成样品采集、设备维修和物资搬运。结合上肢的结构特点,可以将上肢看作成悬臂梁,故选取其单臂负载和双臂负载两种状态进行有限元静力学分析与校核。
3.3 有限元分析
(1)静力学分析
首先在Creo软件中将各零部件进行装配约束,如重合、平行、角度偏移等。根据上述受力分析结果,将装配的外骨骼模型调整为双手举物且单腿支撑的姿态。在保证机构主要承力与传力的形式下,对模型中设计的孔、倒圆角等部位进行简化,以避免网格划分形状不规则,导致求解时间太长或求解失败[16]。随后将简化后的模型导入到Workbench软件并设置材料属性为钛合金。对于装配体来说,对外骨骼采用自动划分网格的方法,生成的网格共有645 748个节点和363 392个单元。利用Skewness(偏度)衡量网格质量[17],模型的网格最大偏度小于0.95且平均值为0.284,说明网格划分质量能够满足有限元分析要求。对于整个外骨骼装配体,需要研究的是单腿支撑那一瞬时的接触情况和静力情况,因此本论文的有限元接触全部设置为绑定接触。
对两种情况进行静力学分析,分别是:单腿支撑时双手捧物情况和单腿支撑时单手举物情况。在单腿支撑时双手捧物情况下(以右腿支撑相为例),以右脚底面为约束面施加固定约束,在弧形腰部固定架上施加一个200 N竖直向下的集中载荷,同时在左右小臂杆件上各施加一个100 N竖直向下的集中载荷,整体的应力分布情况和变形结果如图4所示。
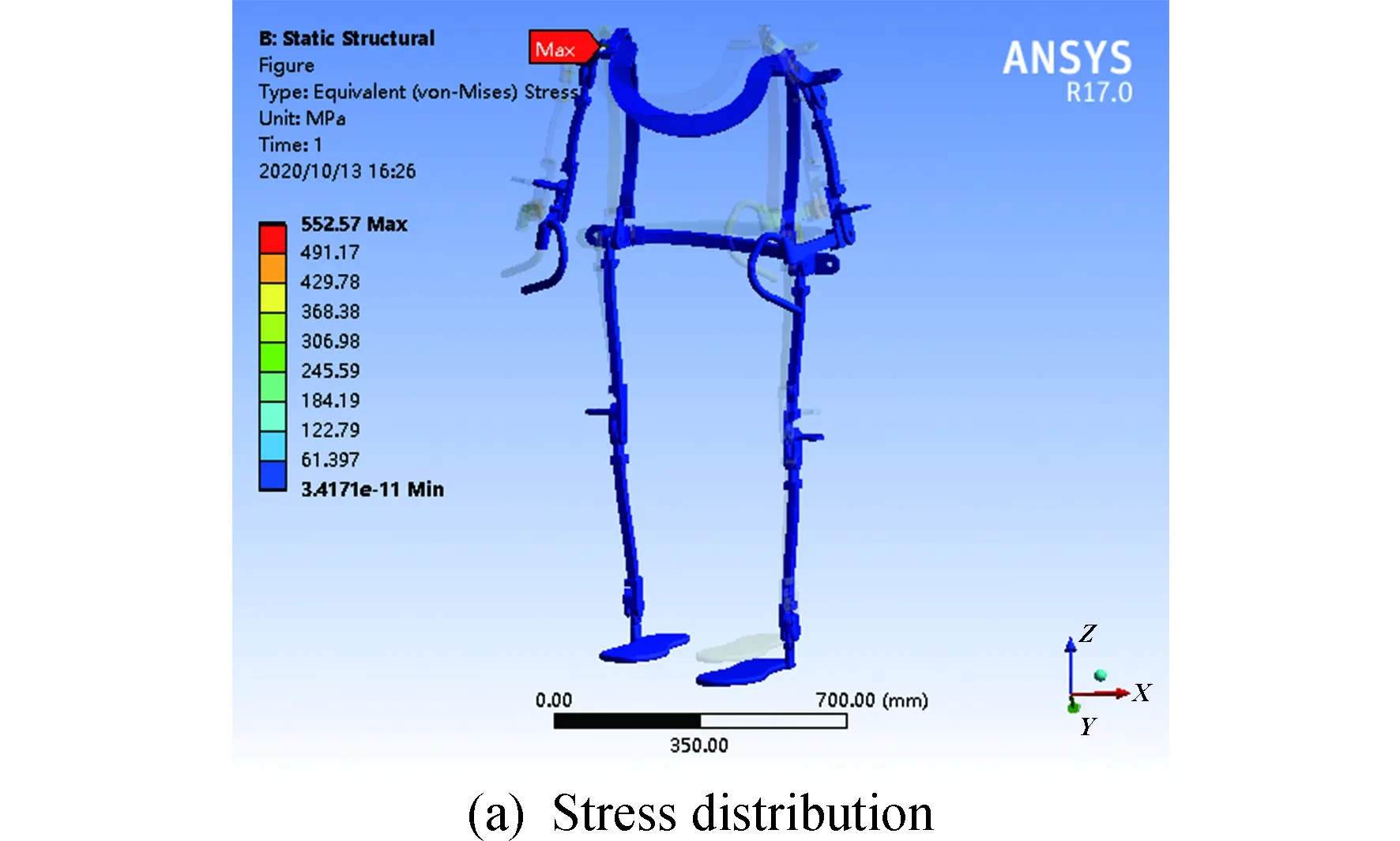
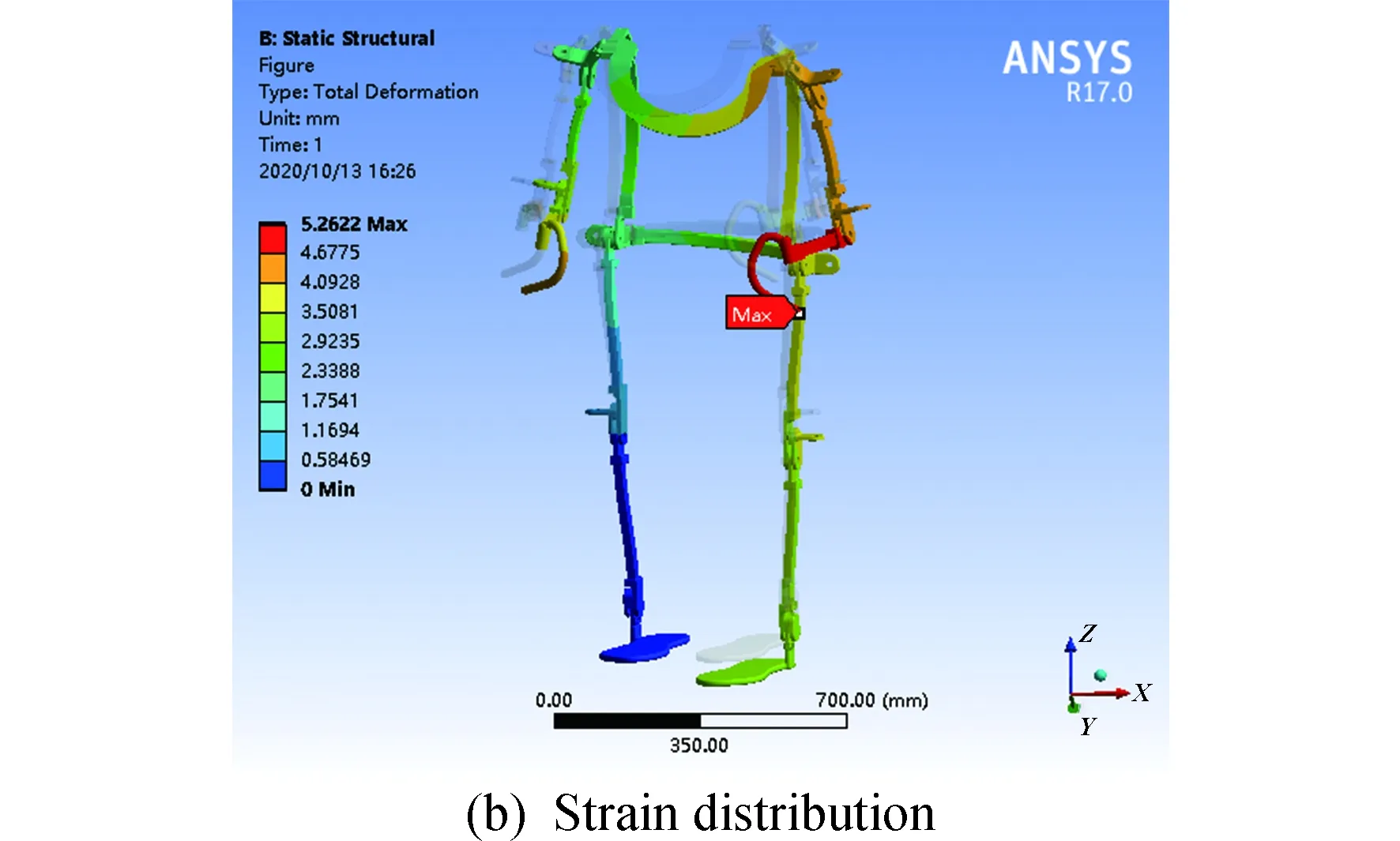
图4 单腿支撑时双手捧物情况下静力学分析结果Fig.4 Statics analysis results with both hands holding objects when supporting one leg
在单腿支撑时单手举物情况下(以右手举物为例),以右脚底面为约束面施加固定约束,在弧形腰部固定架上施加一个200 N竖直向下的集中载荷,同时在右小臂杆件施加一个200 N竖直向下的集中载荷,整体的应力分布情况和变形结果如图5所示。
由图4、图5可知,两种情况下的最大应力均位于弧形固定架与肩关节电机支撑架连接处上,应力最大值分别为552.57 MPa和845.09 MPa。因此要对此处选用高强度的插销,且此处的合页要选用较厚尺寸,能承受轴向和径向的力。双手捧物时,外骨骼左臂因受到一个集中载荷导致整体向左偏移,且最大变形量位于左边U型手环,当左小臂杆件受力,U型手环向下移动,最大变形量5.262 2 mm。单手举物时,最大变形量出现在右边U型手环,由于右小臂杆件受到更大的载荷,U型手环向下弯曲,最大变形量为7.301 5 mm。
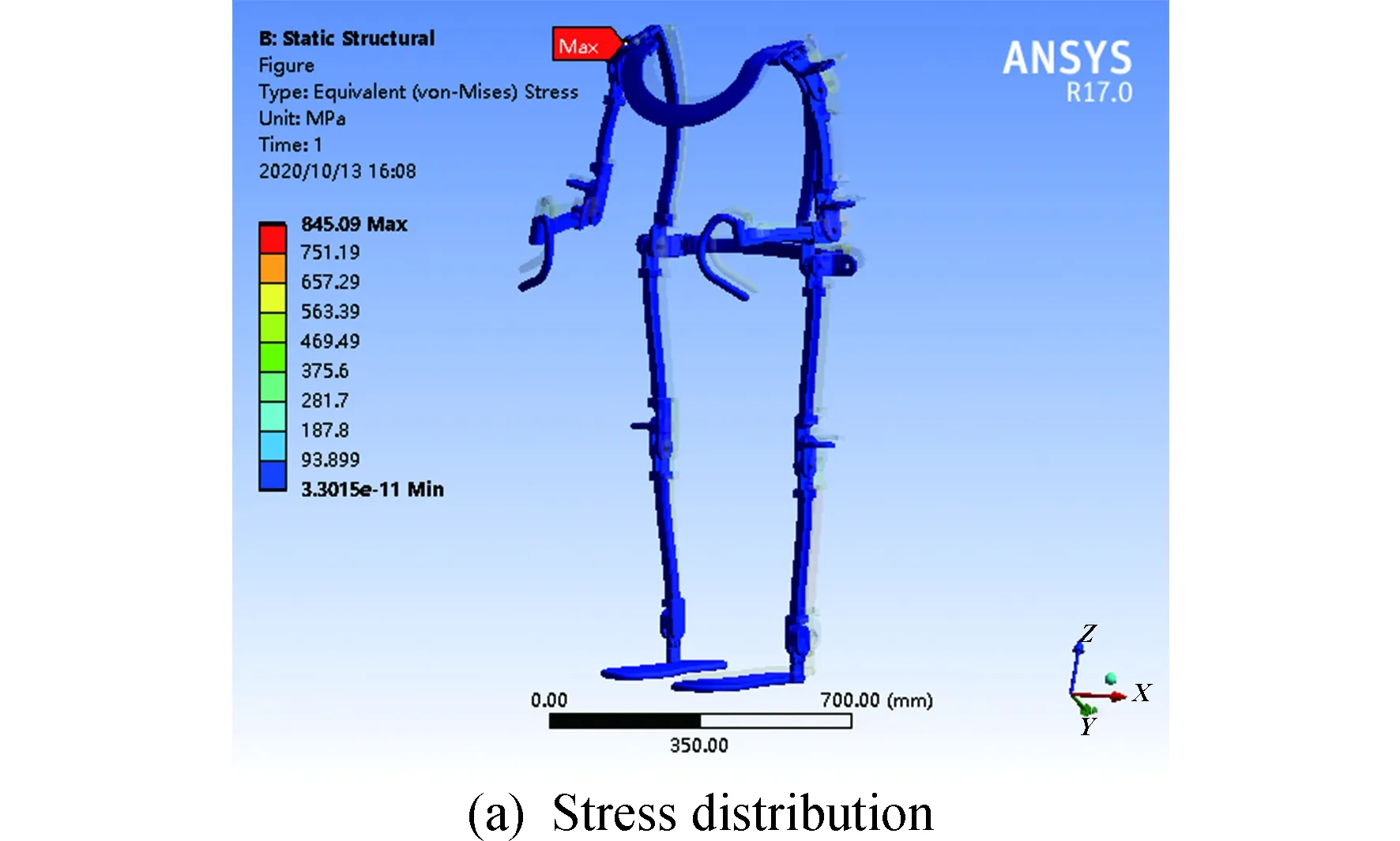
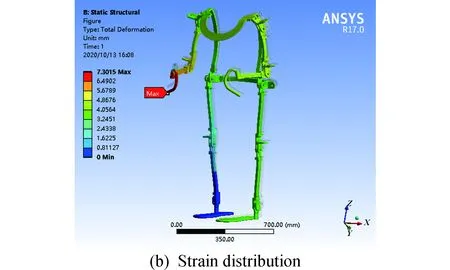
图5 单腿支撑时单手举物情况下静力学分析结果Fig.5 Statics analysis results with single hand lifting objects when supporting one leg
从上述两种情况的静力分析来看,最大应力和最大变形均发生在上肢机构中。最大应力接近材料的极限强度,且手臂末端的变形量较大,需要增强小臂杆件和大臂杆件的刚度,下一步可通过优化上肢机构的尺寸参数来减小最大应力值和变形量。另外,分析除手臂末端外的外骨骼变形情况,摆动腿一侧的变形量要大于支撑腿一侧的变形量,在单腿支撑时双手捧物情况下,摆动腿向前变形约为3.5 mm。因此需要进一步地优化腿部的尺寸结构,防止结构出现失稳情况。
(2)模态分析
模态分析主要用于确定外骨骼的固有频率和模态振型[18]。在运动时,关节助力外骨骼会受到地面的冲击以及机械系统运动而产生振动。若外骨骼与驱动电机激励源发生共振,会严重影响测量仪器的精度,且容易发生疲劳破坏,从而减小外骨骼的使用寿命。如果运动时外骨骼与人体发生共振,那么会影响穿戴者的安全和健康。考虑到低阶固有频率及其对应的振型对机构的振动形式起到决定性作用。因此,对有预应力情况下的外骨骼前六阶进行了模态分析。通过仿真计算,外骨骼的第一阶至第六阶固有频率见表2。

表2 关节助力外骨骼前六阶固有频率
通过上述结果可知,关节助力外骨骼结构前六阶固有频率均在20 Hz以下。在人体步行运动模式的研究中,人体在步行时的摆动频率为2 Hz,在跑动时则为4 Hz[19]。该外骨骼的最小固有频率均大于这两个频率,因此不会与人体发生共振现象。同时,参考旋转电机振动文献[20],当电机的转速在600~12 000 r/min时,其振动频率为10~1 000 Hz。
外骨骼结构运动的前3阶低于最小的振动评定频率,其他阶次的固有频率在该振动频率范围之内,因此可能会产生共振现象,外骨骼前六阶模态振型如图6所示。

图6 外骨骼前六阶模态振型Fig.6 The first six-order model shapes of the exoskeleton
4 尺寸优化
通过建模得知,第二代关节助力外骨骼机械结构整体质量约为18.466 kg,大于设计目标所要求的15 kg。同时,单腿支撑时的单手举物情况下的最大应力接近钛合金材料的极限强度,需要进一步地优化该工况下的结构尺寸。而在外骨骼最初的尺寸设计时,主要参考文献所提出的同类外骨骼来确定大致尺寸,这使得有些位置在受力和运动时发生了变形,部分结构设计未达到设计要求。因此,利用ANSYS中的Design Exploration模块寻找一种最优组合的机构尺寸设计方案[21]。外骨骼结构尺寸优化步骤如下:①选择外骨骼主要杆件尺寸作为设计变量,确定变量范围;②选择需要优化的性能参数作为优化目标,设置约束条件;③利用响应曲面优化模块进一步生成设计变量的灵敏度图,进一步调整设计变量变化范围,仍以约束条件开展优化设计,以获得最优的尺寸配置。关节助力外骨骼优化 设计流程如图7所示。
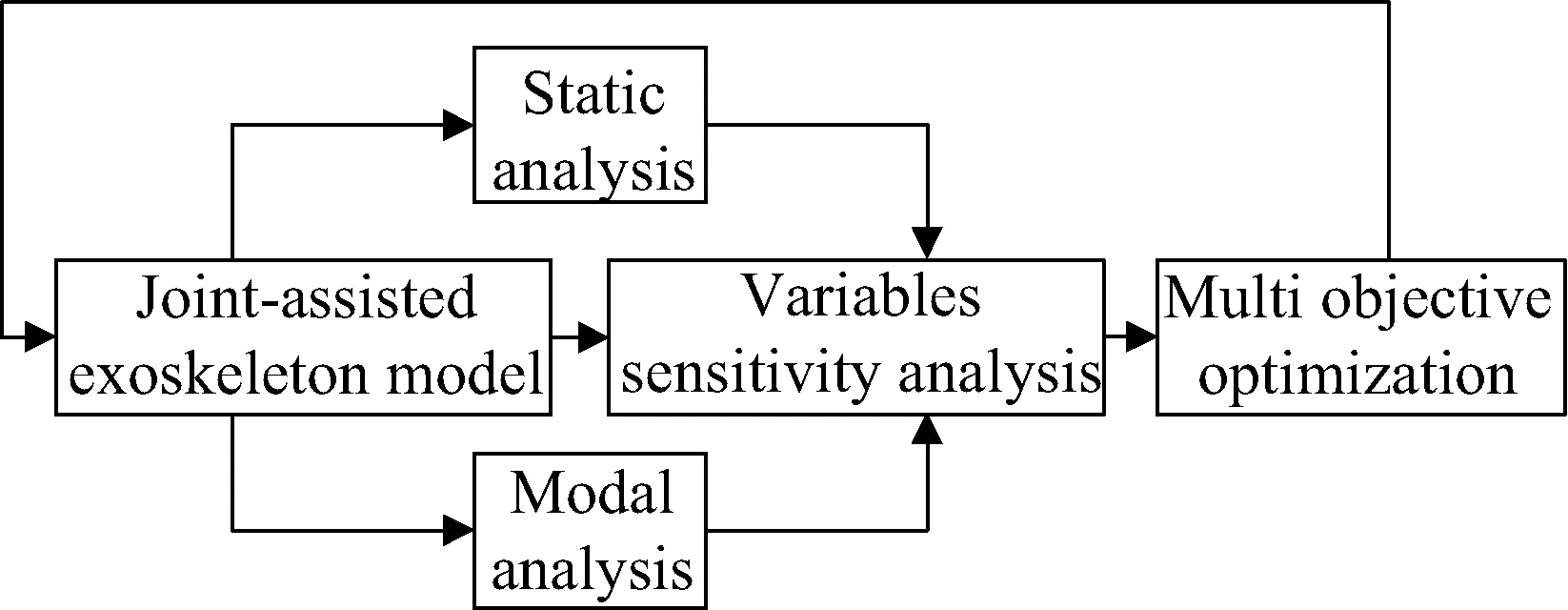
图7 外骨骼尺寸优化设计流程Fig.7 Size optimization design process of the exoskeleton
4.1 设计变量
在本文,主要研究外骨骼杆件截面的长、宽的变化对输出参数的影响,而杆件的长度是根据宇航员的身形来确定的,作为一个确定的数值。第二代关节助力外骨骼主要由上肢的大臂杆、小臂杆、背架条和弧形肩部固定架以及下肢的弧形腰部固定架、大腿杆和小腿杆作为设计变量。由于外骨骼左右两边结构相同,且采用的是全局变量进行参数化建模的,因此仅选取右侧部分进行分析。设计变量对应的结构尺寸以及取值范围含义见表3。SL是截面长 (section length),SW是截面宽 (section width),OV是初始值(original value),MaV是最大值(maximum value),MiV是最小值(minimum value)。

表3 设计变量及取值范围
4.2 优化变量及约束条件
由上述分析可知,首先需要将外骨骼整体质量和最大von-Mises等效应力作为优化变量进行输出。通过弧形固定护具,外骨骼与宇航员耦合。当两者接触部位的偏移量较大时会产生严重的干涉,从而导致人体穿戴舒适性变差[16],因此需要将最大总应变作为优化变量。在模态分析中,受限于外骨骼结构主体设计形式,固有频率难以大幅提高,当共振发生时,减小振幅就成了减小干涉影响和提高穿戴舒适性的主要途径。此外,提高固有频率也是提高稳定性的重要手段,选取第一阶固有频率作为优化变量。
对于最大von-Mises等效应力的约束条件,通过查阅钛合金的文献[22]可知,对于所用的钛合金TC4材料,可以满足月表温度在-180 ℃到+150 ℃的环境。钛合金在-196.15 ℃时,其拉伸强度为1 500 MPa,屈服强度为1 420 MPa。在200 ℃时,其拉伸强度为799.9 MPa,屈服强度为731.2 MPa。另外,材料的许用应力[σ]与极限应力σs之间的关系为[σ]=σs/SH。其中SH为构件的安全系数,钛合金作为塑性材料,当考虑静强度时,取SH=1.5,则钛合金的最大许用应力为570 MPa,上述优化目标及对应的约束条件取值见表4。

表4 优化目标及约束条件
4.3 优化计算
利用Parameters Correlation分析出外骨骼系统设计变量之间的相关性以及输出变量关于输入变量的敏感性,确定对输出变量影响显著的输入变量,提高后续响应面和优化计算的效率和精度。通过设计点采样和曲面拟合技术,得到优化变量关于设计变量的响应面。由于优化变量较多,遗传算法的从问题解的串集开始多点搜索、用适应度函数值来评估个体、以及采用概率的变迁原则来指导搜索方向等特点,增强了遗传算法在多目标搜索和优化问题方面的有效性[23]。因此,在响应面优化中选择多目标遗传算法MOGA(multi-objective genetic algorithm)作为目标优化方法。为了研究外骨骼模型的优化变量对系统参数或设计变量的敏感程度,局部灵敏度分析结果如图8所示。
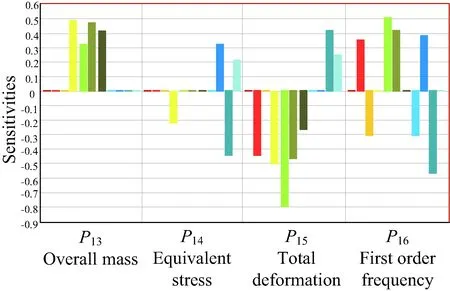
图8 设计变量的局部灵敏度Fig.8 Local sensitivity of design variables
在图8中,横坐标的4大输出列分别对应4个优化变量,每大列中的柱状代表着一个设计变量,按照P1到P12进行依次排列(由于涉及到装配问题,背部杆件的截面宽P6无法进行优化计算)。图8可以清晰地显示出设计变量对优化变量的影响程度,以及正负相关性,这样便于反推导出设计变量所需的变化趋势,再结合满足约束条件的3组最优候选方案,可以初步确定设计变量。另外,在实际加工过程中,0.1 mm的加工精度需要大量的加工成本,所以择尺寸为整数值的确定方案。
4.4 结果对比
根据设计变量的局部灵敏度,多目标约束条件以及MOGA优化算法得到了一组设计变量的最终取值,关节助力外骨骼结构尺寸优化前后各参数的变化见表5。
通过表5可以看出,大臂杆件和背部杆件的截面面积有了适当增加,杆件的加粗说明对应的承载能力有了提高。其他杆件的截面面积得到了减小,说明相应结构设计时采用的尺寸过于保守。经过优化后,外骨骼整体质量P13和最大von-Mises等效压力P14分别下降了19.34%和33.27%,满足之前给定的设计指标,并且还存在一定的设计余量;最大总应变P15下降了11.39%,优化效果较为明显,主要是由于腰部杆件P5的增大对其灵敏度较大。第一阶固有频率P16经过优化增加了2.89%,优化后刚度降低导致结构固有频率很难提高。优化后外骨骼的第一阶至第六阶固有频率见表6。

表6 优化后外骨骼前六阶固有频率
根据分析结果,调整尺寸并机械加工,研制的主动航天服关节助力外骨骼第二代样机如图9所示。

图9 关节助力外骨骼第二代样机结构Fig.9 Structure diagram of the second-generation prototype of the joint-assisted exoskeleton
5 结论
本文设计并研制了一种提高航天服关节活动性能的助力外骨骼样机,通过对比优化前后的整体质量、最大von-Mises等效应力等参数,验证了结构优化方案的可行性。主要结论如下:
1)针对未来星表探测作业,提出了主动航天服概念设计方案,研制了其中第一代关节助力外骨骼样机。根据使用反馈提出了第二代样机的设计模型,利用有限元分析软件完成结构尺寸优化,调整杆件尺寸,得到了第二代关节助力外骨骼样机。
2)对比单腿支撑时的单手举物情况下优化结果,最大等效压力从845.09 MPa下降至小于钛合金材料最大许用应力的563.89 MPa,整体质量也从18.466 kg下降至小于设计目标值的14.89 4kg,存在一定的设计余量,整体优化效果较为明显。
3)未来工作主要集中航天服阻尼力矩迟滞特性以及主动航天服运动控制系统研究,为研制具有高机动性和高负载能力的主动航天服提供技术支撑。
