基于PIV 技术的新型土壤收缩轨迹测试装置研制
2021-10-23侯宇宙
侯宇宙,陈 伟,陈 捷
(1.河海大学 岩土力学与堤坝工程教育部重点试验室,江苏 南京 210098;2.河海大学岩土工程科学研究所,江苏 南京 210098;3.河海大学道路与铁道工程研究所,江苏 南京 210098)
0 引 言
PIV 技术是基于图像处理识别技术的一种粒子变形测试技术[1],因其具有连续变形测定、高效快捷、无介入测量等优点,近年来被广泛应用于流体力学、试验力学等相关学科[2-3]。21 世纪初,White 等[4]首次将PIV 技术应用于岩土体工程领域,并开发了Geo-PIV 计算程序;同时基于此技术测试了桩体贯入试验中桩周土的位移变化[5]。自此,PIV 技术在岩土体位移测试中得到了诸多学者[6-8]的青睐,并逐渐成为岩土工程相关研究的一个重要发展方向。
基于PIV 技术,张吉禄等[6]研究了透明土中根键桩在抗拔力作用下桩周土体的位移场变化情况;张俊然等[7]通过膨润土室内径向压缩试验,记录了其裂隙开展情况和位移矢量场;黄维等[8]研究了重塑黄土在拉力作用下的拉张裂缝形态。前人的成果多集中在外力作用下土的被动位移研究,对试验装置的研究较为罕见。黄伟等[9]研发了一套基于变形数字图像处理的土体材料拉伸试验装置,其重点在于控制夹具与土样之间的位移,从而提高PIV 技术的测试精度,未涉及温度控制系统。然而,岩土体本身因含水率变化所表现出来的动态位移特征(收缩轨迹),往往可以反映其诸多常规物理力学指标,如粘性土的液、塑、缩限,膨胀土的膨胀等级等。因此,研发一套可控制岩土体失水速率且能连续记录其表面位移轨迹的装置具有实际意义。
此外,像素级的测试精度是PIV 技术的一个重要优势,但同时也对测试环境和后期处理提出了苛刻的要求。刘振亚等[10]采用摄影棚和LED 光源为试验制造稳定光场,并对比不同示踪粒子构建黏土表面纹理时对试验结果的影响。王世鑫[11]提出采用碳末颗粒增强PIV 测量黏土变形的精度。段俐等[12]认为采用互相关算法对PIV 图像进行分析最为有效,因此必须从硬件方面提高跨帧技术。目前,尚未有相关资料提出一种可满足PIV 技术的后处理要求,且被广泛使用的图像采集装置。
本研究旨在研发一套适用于PIV 技术的图片采集装置,在满足测试环境的基础上,提供一个可控的恒温环境来降低土样的含水率,达到测定试件表面收缩轨迹的目的;同时,从相机成像畸变和示踪粒子埋设等方面对该装置进行误差计算和可靠性分析。
1 装置的研发和功能
1.1 后处理的要求
PIV 技术是一种依托图像处理而兴起的瞬态流动平面二维速度场测试手段,采用该技术进行土壤表面收缩轨迹监测时,所采集图片的可靠性将直接影响测试结果的准确性。因此,后处理的图片之间必须满足以下要求:
1)PIV 后期处理软件采用工业相机拍摄不同时刻土样表面的图片,分析统计一段时间间隔内试样各像素点的矢量位移或平均速度,因此不同时间拍摄的图片与相机的相对位置应保持不变。
2)PIV 图片处理软件需严格统一拍摄环境,避免图片拍摄时因光线改变而引起位移场的误算,因此拍摄的图片要保证相同的曝光度。
3)试验通过试样表面的动态位移场规律来判断土的各项指标,需保证各组试样在相同时间内吸收的热量恒定。
1.2 装置的构造
为满足上述要求,研制的装置应满足:在成像期间,相机和试样的相对位置保持不变;图片的光照条件维持稳定,避免自然光随时间变化对图片成像产生影响;为试样提供稳定的温度环境。图1 为装置的结构示意图。整体结构分为3 部分:图像采集模块、图像存储远程控制模块和图像处理模块,其中图像采集模块和图像存储远程控制模块之间通过有线传输,图像存储远程控制模块和图像处理模块之间通过无线传输。
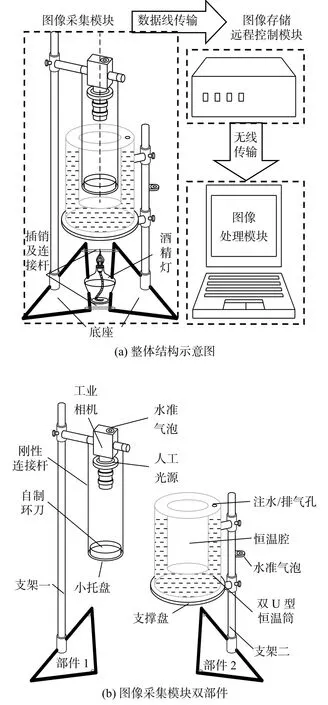
图1 装置结构示意图
本研究的核心结构为图像采集模块,由两个主体部件(部件1、部件2)组成。部件1 通过支架一连接工业相机、人工光源和试验环刀(试样),工业相机外接图片采集存储装置(笔记本电脑),人工光源外接光线控制器;部件2 通过支架二支撑恒温筒,恒温筒为双U 型玻璃结构,内外层之间加入适量的水,在维持水沸的情况下,通过内壁的热辐射向腔内提供稳定高温环境。
1.3 装置的功能
保证试验全过程试样所处的环境温度绝对一致。试验过程中双U 型玻璃结构之间填充的水加热并保持沸腾,内壁向槽腔内热辐射提供恒定的热源,使整个腔内形成一个稳定的温度场,在腔体中的一定高度范围内保持恒温。
保证试样在试验全过程可以被拍摄和直接观察。支架一上安装的工业相机能够连续记录试样失水收缩干裂的动态变化过程;无机玻璃材质的双U 型恒温筒能够使实验人员随时观察试样的表观变化。
保证试验全过程试样与热源振动的隔离。支架一、支架二相互分离的结构可以避免恒温筒水沸所产生的震动对试样产生扰动而影响实验结果。
保证试验全过程试样不受电力热源的控制。采用酒精灯作为加热源能够满足本装置在现场无电源条件下的使用。
1.4 组件的参数
装置的核心组件为工业相机和恒温筒,辅助组件包括自制环刀、人工光源、酒精灯等。各组件的尺寸、性能等参数如下:
1)工业相机:有效像素500 万,成像距离45~50 cm(高于恒温筒3~5 cm),畸变率小于1%,工作温度0~70 ℃。
2)恒温筒:外部高度60 cm,外部直径30 cm;内部(恒温腔)高度50 cm,内部直径20 cm;材质为石英玻璃,长期使用温度为1100 ℃。
3)自制环刀:采用普通土工环刀加工而成,内部直径6.81 cm,内部高度1 cm;环刀一侧设置为锐口,另一侧设置成密封底。
4)人工光源、酒精灯:人工光源采用可调节光照强度的环形无影灯;酒精灯采用可调节火焰大小的酒精喷灯,外焰温度为1000 ℃。
2 试验流程
2.1 前期准备工作
1)温度标定
在整个试验开始前,需要对恒温筒内部的温度分布进行标定,标定期间,恒温筒中的水持续沸腾。图2 为恒温腔中的温度分布曲线,从其底部至顶部的温度逐渐减小,在距筒口10 cm 处温度发生骤减;在筒口10 cm 以下,温度分布与深度近似呈线性相关。试验所用试样高度1 cm,经验算,在筒口10 cm以下,可以不考虑试样的上下温差。由此,可根据温度标定结果调整试样位置来控制试验所需的温度值。
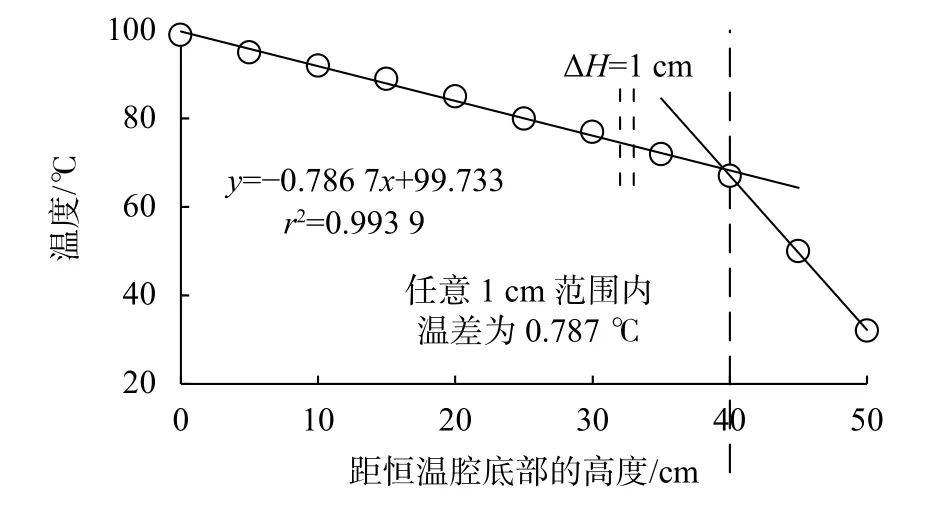
图2 恒温腔中温度分布曲线
2)自制环刀制样
图3 为制样前后的环刀实物图。制样前,需在环刀内部均匀涂抹凡士林,一方面有助于顺利切样,另一方面可确保试样收缩过程不受环刀侧壁和底部的摩阻力。
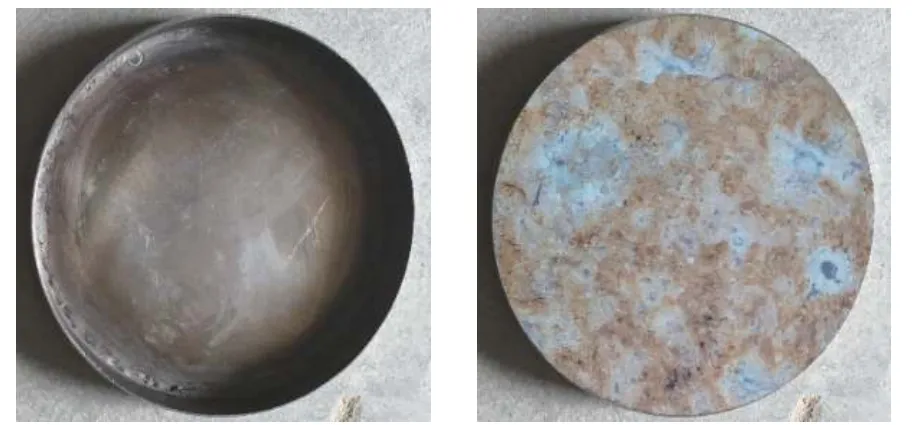
图3 制样前后的环刀实物图
3)光照环境
为避免自然光随时间变化影响图片成像,试样装置应处于完全黑暗的环境,并在固定位置设定人工光源。室内试验可在封闭无光的房间进行,现场试验可在临时搭建的帐篷中进行。
2.2 试验过程
1)试验步骤
试验开始前,按照既定试验温度确定试样在恒温腔内的高度,调整刚性连接杆的高度并做好标记;放入校验土样,对部件1 进行光源、焦距、曝光和拍照区域的调整,并确保工业相机拍摄面和试样表面平行;对部件2 的恒温筒位置进行调整,使得试样的托盘处于其中心位置,恒温筒底部采用酒精灯进行加热至水沸腾。
断开两部件之间的插销及连接杆,设置图像自动存储程序;放入试样并立即拍摄第一张图片,之后存储系统可定时拍照或拍摄连续视频。在此过程中,部件2 中恒温筒中的水持续沸腾。
本研究中,拍摄时间间隔为5 min。在试验进行到5 min 时,得到第二张图片,将0 min 和5 min得到的图片记为第1 组,试验进行到10 min 时,得到第三张图片,将5 min 和10 min 得到的图片记为第2 组,以此类推直至试验结束。
2)位移计算
试验采用PIVview2c®图像处理软件,其基本步骤包括:图像灰度处理、网格划分及设置分析布、搜索并匹配相似网格、计算位移增量均值。图4 为网格划分及分析步设置示意图。考虑到软件计算的准确性和数据处理的效率,分析区域的网格大小设置为16 pixels×16 pixels,分析步设置为8 pixels。
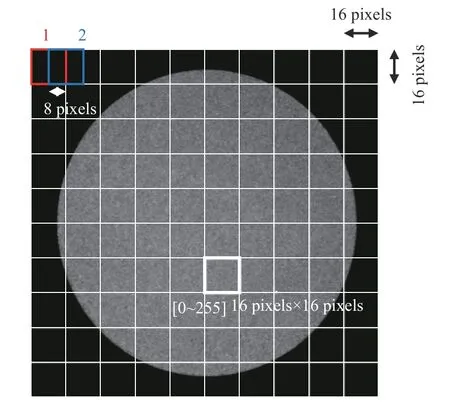
图4 网格划分及分析步设置示意图
采用相同的加权平均算法对图像进行灰度处理,为处理后的每个像素点赋值(0~255);将每组已分类图像中的第一幅图像划分为若干个大小相同的网格,像素的不同灰度值使每个网格生成唯一的灰度共生矩阵;当试样收缩和开裂时,网格整体移动,单个网格的灰度分布没有变化。通过在第二幅图像中寻找匹配度最高的灰度共生矩阵,即可确定每个网格的位移特征。红色区域是要搜索的第一个网格,蓝色区域是要搜索的第二个网格。匹配结束后,即可得到试样在该时间段内所有像素点的位移增量均值,按下式计算:

式中:Ej——一段时间内的位移增量均值;
j——0~5,5~10,10~15,···;
xi−环刀范围内每个像素的实际位移,mm;
n——环刀范围内像素点的个数。
3 精度分析及试验结果
3.1 图像失真影响
工业相机在成像过程中会发生畸变,本文中使用的相机畸变率f小于1%。图5 为图像失真的原理图,特定点的位移从Dnor变为Ddis。在本文中,5 min 内试样像素点的最大位移值小于25 pixels。因此,由于图像失真造成的误差值小于0.25 pixels,是可以接受的。
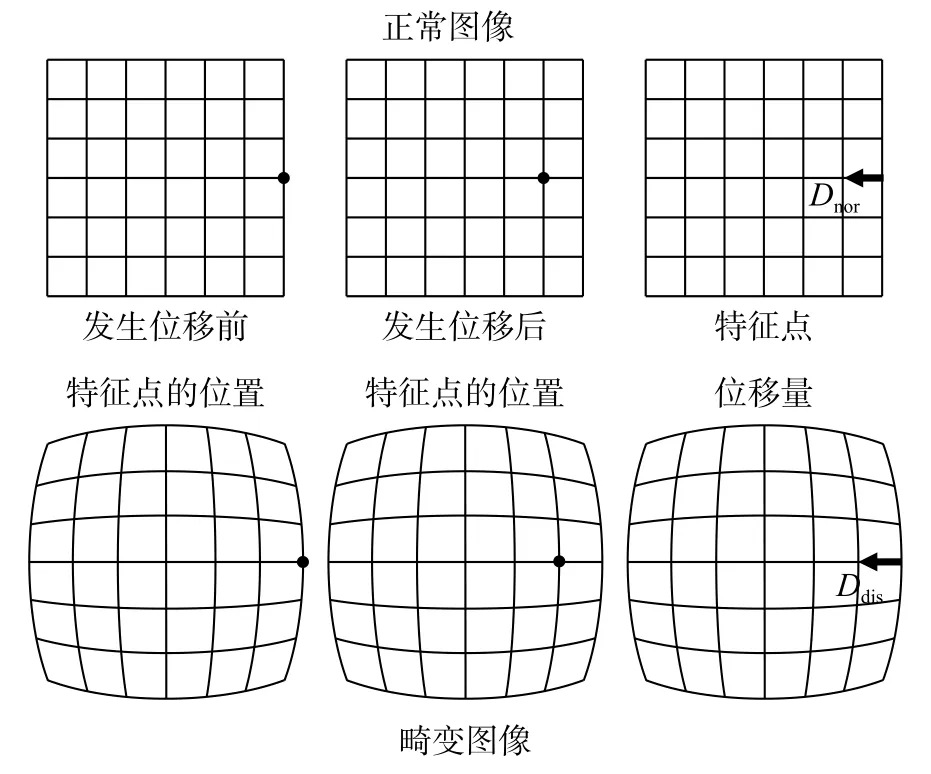
图5 图像畸变的原理
式中:f——相机的畸变率;
Δ——图像畸变导致的误差值;
Dnor——像素点的实际位移;
Ddis——畸变图像中像素点的位移。
3.2 示踪粒子影响
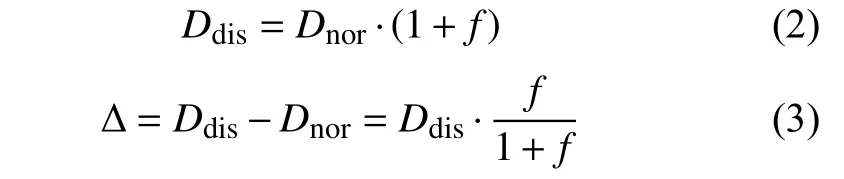
图6 为间隔1 s 拍摄并经过软件处理后的位移增量灰度图,其中图6(a)为表面不覆砂的实验结果,图6(b)为表面覆砂的实验结果。覆砂材料选用中国ISO 标准砂,产自福建省厦门市,粒径范围0.08~2.00 mm,本试验选用的粒径范围为0.08~0.25 mm。图7 为位移标量的标准尺。
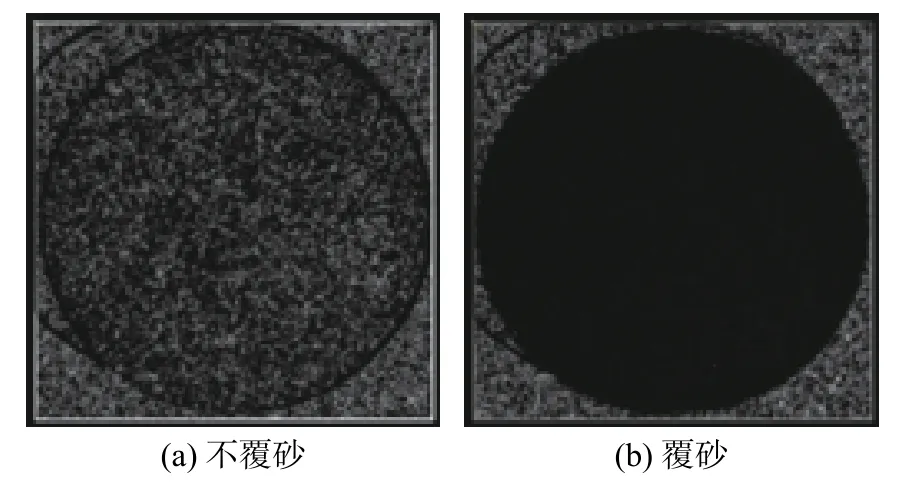
图6 间隔1 s 的时间位移增量灰度图

图7 灰度标准尺
理论上,试样在此时间段内没有位移产生。图6(a)灰度图中明显看到试样多处发生了位移,这种现象并不代表真实的位移变化,而是土样本身不均匀的表观特征对实验结果的影响;图6(b)灰度图呈现深黑色,代表试样没有显著位移,验证了采用标准砂作为示踪粒子对实验结果的可靠性。通过各像素点位移标量值的统计计算,分别得到两组实验的多个位移增量均值,如表1 所示。数据显示,覆砂情况下的位移增量均值小于不覆砂,两者相差一个数量级。
表1 不覆砂和覆砂两种情况下的位移增量均值
3.3 位移增量均值变化规律
图8 为不同初始含水率下得到的位移增量均值随时间的变化曲线。从图中可以看出,位移增量均值均呈现出先增大,后减小,最后趋于稳定的规律;初始含水率越高,位移增量均值达到稳定所需的时间越长。
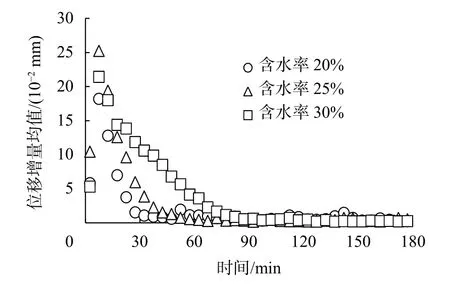
图8 位移增量均值随时间变化曲线
在恒定的高温环境下,试样单位时间内吸收的热量相等,在试样尺寸较小的情况下,可认为含水率的下降与时间线性相关。将图8 与土样收缩曲线(图9)对比,说明位移增量均值能很好地反映试样的收缩过程。由此,位移增量均值稳定时刻对应的含水率即为缩限含水率,进一步地,位移增量均值在不同变化速率下能反映试样收缩的轨迹,可用来确定粘土的液、塑限;另外,膨胀土受内部蒙脱石和伊利石等矿物成分的影响,表现出吸水膨胀、失水收缩的特点,矿物成分含量越高,土样的自由膨胀率越高,胀缩态势也越明显,可通过土样在失水过程中的位移轨迹来反映土的膨胀等级。
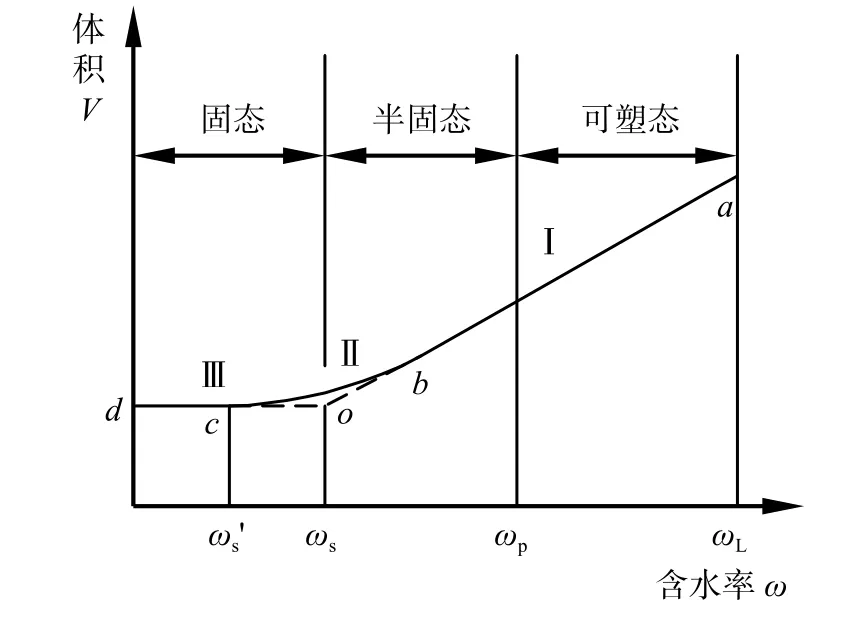
图9 土样收缩曲线
4 结束语
基于粒子图像测速技术,研制了一种可用于测量土壤表面收缩轨迹的装置。该装置由图像采集模块、图像存储远程控制模块和图像处理模块三部分组成;装置的核心结构(图像采集模块)由双部件组成,试验状态下两者相互分离;恒温筒内壁通过热辐射在槽腔内形成稳定温度场,为试样提供恒定热源;装置另配有人工光源、酒精灯等辅助组件,能够在室内及现场环境下完成试验过程;在试样表面覆标准砂的情况下,计算结果的精度能满足试验要求;工业相机本身存在的图像畸变对试验结果的影响可以忽略;该装置能较精确得到试样表面的位移轨迹,试样的位移增量均值随时间呈现先增大,后减小,最后趋于稳定的规律;试样初始含水率越高,位移增量均值达到稳定所需的时间越长;该装置在试样表面位移计算中能达到像素级的精度,但是本研究尚缺乏试验支撑;已有研究表明粘性土的收缩曲线、膨胀土失水收缩开裂等与试样表面位移变化密不可分,因此,可基于该装置进行粘性土的液限、塑限、缩限确定以及膨胀土的膨胀等级判定等方面的工作。
