嫦娥五号探测器采样区快速视觉测量技术及应用
2021-10-19李铁映鄢咏折陈丽平罗光辰
李铁映,顾 征,鄢咏折,陈丽平,王 彤,李 达,罗光辰
(1.北京空间飞行器总体设计部,北京 100094;2.中国科学院空天信息创新研究院,北京 100094)
0 引 言
在深空探测任务中,视觉测量是保障任务实施的重要技术手段。随着双目视觉测量技术不断成熟,该技术广泛应用于探测器自主导航、三维地形重建、景物立体测量等方向。如机遇号、勇气号利用双目相机实现自主导航及路径规划[1],嫦娥三号[2]、嫦娥四号任务应用双目测量技术[3]完成了月球车的避障及路径规划。
嫦娥五号探测器的核心任务是月面采样,而采样区的地形地貌是限制采样实施的重要因素,因此要求探测器能够快速获取采样区地形地貌信息,为采样点选取、表取采样机械臂路径规划提供数据支持。针对该需求,综合考虑采样区域范围、整器构型布局、光照条件等因素,嫦娥五号探测器配置采样过程监视相机A/B构成了一套双目测量系统,通过视觉测量技术快速获取采样区域的地形地貌数据信息,同时还可对采样过程进行实时监测。
应用双目视觉测量技术开展测量任务时,关键环节包括[4]:1)相机标定,获取相机的内外参数;2)立体匹配,获取视差图并在此基础上进行三维点云重建及景物测量;3)精度验证,对系统测量精度进行验证。
针对上述关键环节,研究者们进行了大量的研究。在相机标定算法方面,从标定原理上可分为:传统相机标定法、自标定方法和主动视觉标定。由于精度及成本的因素,在视觉测量系统中常采用基于标定物的传统相机标定法。传统相机标定法的典型代表有Tsai两步法、非线性的优化法、DLT法(Direct linear transform)及张正友法[5]。其中张正友法具有操作简单、成本低、易于实施、精度较高的优点,取得了广泛应用[6]。研究人员进一步将遗传算法[7]、模拟退化算法[8]、粒子群算法[9]、神经网络算法[10-11]等结合张正友法用于相机标定,标定精度有了一定改善,但代价是计算量增加,且易陷入局部最优。传统的张正友标定法主要是基于棋盘格进行标定[12],研究人员对棋盘格尺寸、图像数量与标定结果的关系进行了分析[13],并提出了靶标设计要素[14]。但基于棋盘格的方法易受噪声和图像质量影响,因此基于圆环或圆形靶标的标定方法被陆续提出[15-17]。但在射影变换中会引入畸变,导致圆形靶标圆度变小,进而导致圆心提取误差[18]。
立体匹配是三维重建中最关键的一步,常用的匹配算法可分为全局匹配、局部匹配两类,代表算法如动态规划法、置信度传播法、图割法及SGM(Semi-global matching)等[19]。为提升运算效率,研究人员引入了特征点选择过程,形成了基于SURF(Speeded up robust features)、SIFT(Scale-invariant feature transform)、ORB(Oriented fast and rotated brief)等特征提取算法的匹配算法[20]。为进一步提升匹配效果及运算效率,研究人员对多个算法进行了改进[21-24],并研究了算法融合的技术途径[25-26],都取得了不错效果。近些年,随着深度学习的流行,研究人员也尝试将深度学习用于图像匹配,并显示出了一定优势[27]。但深度学习在弱纹理区域、遮挡区域的匹配效果不佳,其在密集匹配中的应用仍然还有很长的路要走[28]。
对双目视觉测量系统进行地面精度验证时,一般采用的方法是搭建三维控制场[29],具体采用悬垂金属杆或墙面贴靶标的方式。整个过程所需的空间、时间资源都比较大,不适合在受限条件下多次应用。
虽然获得了丰富的研究成果,但各环节在工程实施中还会受到很多约束,具体到嫦娥五号任务中,面临以下工程难题:相机标定时空受限;月面呈现弱纹理特征;AIT(总装、集成及测试)场景下不支持搭建三维控制场。为解决上述问题,本文设计了一种采样区快速视觉测量技术,包括时空受限条件下的相机标定、适用于弱纹理特征的匹配及AIT场景下的测量精度验证。通过该技术,在地面充分验证了嫦娥五号探测器视觉测量系统的测量精度满足任务要求,并在在轨任务实施过程中,1s内对采样区地形进行了三维重建,有效支持了月面采样任务的实施,证明了本文方法的有效性。传统视觉测量技术的实施过程如图1所示:
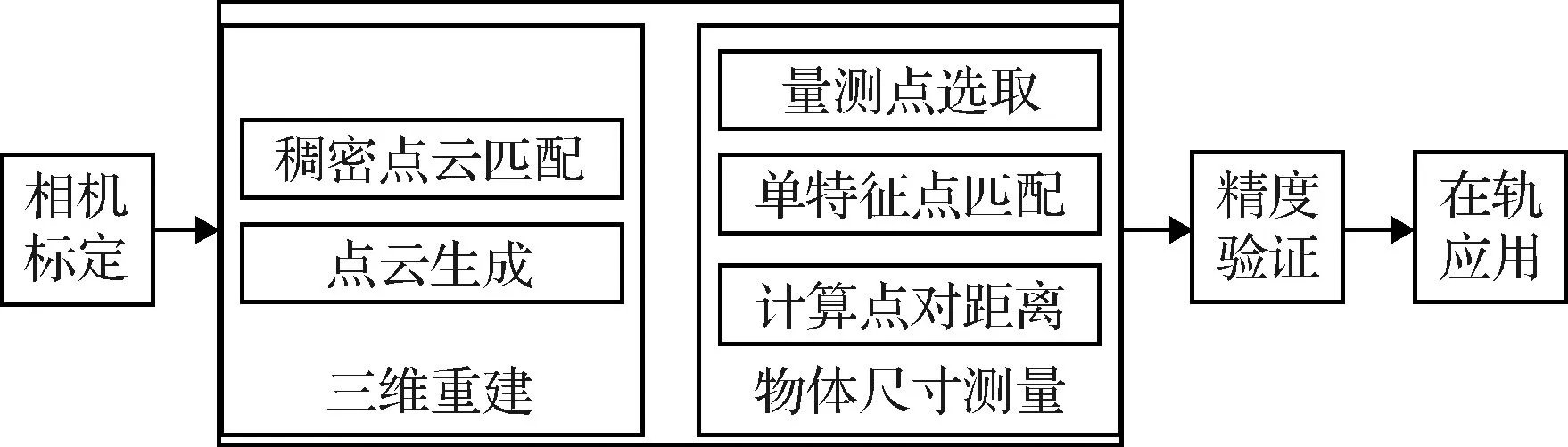
图1 视觉测量组成及实施过程Fig.1 The diagram of visual measurement system and operation procedure
对于嫦娥五号探测器,由于场地约束,相机标定、精度验证等操作面临工程实施难题;由于月面的弱纹理特征及在轨任务实施约束,要求系统能够适应弱纹理特征并具有较高的运算速度。以上需求及约束限制了传统视觉测量技术在嫦娥五号任务中的应用,因此本文提出了采样区快速视觉测量技术,主要针对时空受限、月面弱纹理等约束条件,面向工程应用,开展了以下三个方面的研究:
1)时空受限的相机标定;
2)适应月面弱纹理的密集匹配;
3)AIT场景下的测量精度验证。
1 时空受限的相机标定
为保证测量精度,应在AIT、发射场等阶段对相机进行多次标定。相机装器后,受到场地、测试时间、相机布局、相机不能移动等约束,使得标定工作面临诸多限制,常规的标定方法已不能完成受限条件下的标定任务。
1)相机标定算法选择
综合考虑标定精度、场地约束、操作复杂性、成本、算法稳定性及成熟度等因素,选择张正友法作为标定算法。但该标定算法在嫦娥五号探测器任务应用中,还面临着操作空间、时间受限的难题,因此下文对标定板、标定图像数量选择进行了设计。
2)标定板设计
标定板尺寸、相机视场及标定板位置关系示意如图2所示:
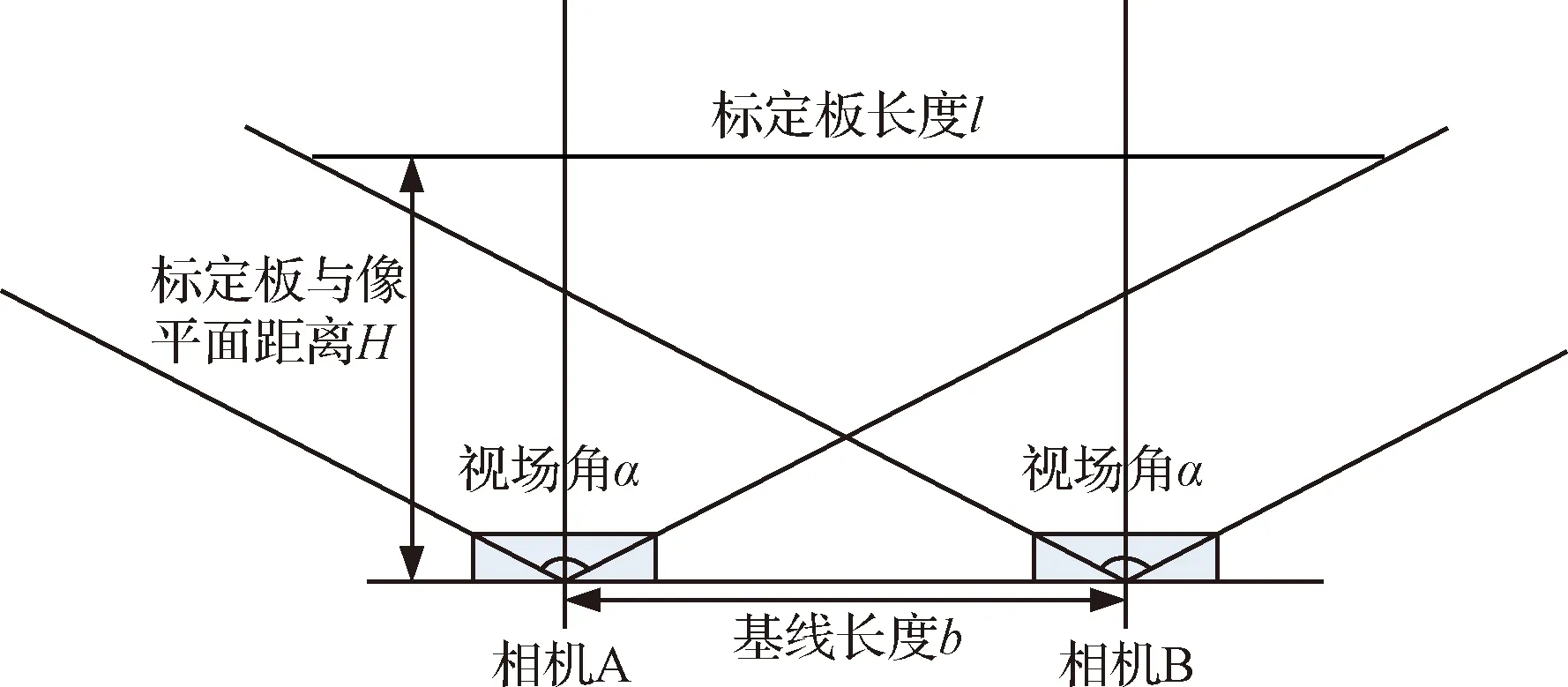
图2 标定板尺寸与相机视场关系Fig.2 The relationship between calibration panel size and view field of cameras
采样区域为两个相机视场覆盖的区域,经过工程实践确定:当标定板占据单个相机2/3视场时即能够满足标定精度。标定板与像平面距离H、基线长度b、视场角α、标定板长度l的关系如下:
(1)
(2)
根据相机视场角及器上安装位置,设计了棋盘格标定板,尺寸见表1。并确定了标定板与整器的位置关系,如图3所示。选择该尺寸的标定板及摆放位置,可保证在标定时只需调整标定板姿态或三角架高度,而不需频繁移动标定板位置,就能够使标定板占满2/3视场。

表1 标定板设计参数Table 1 Design parameters of calibration panel
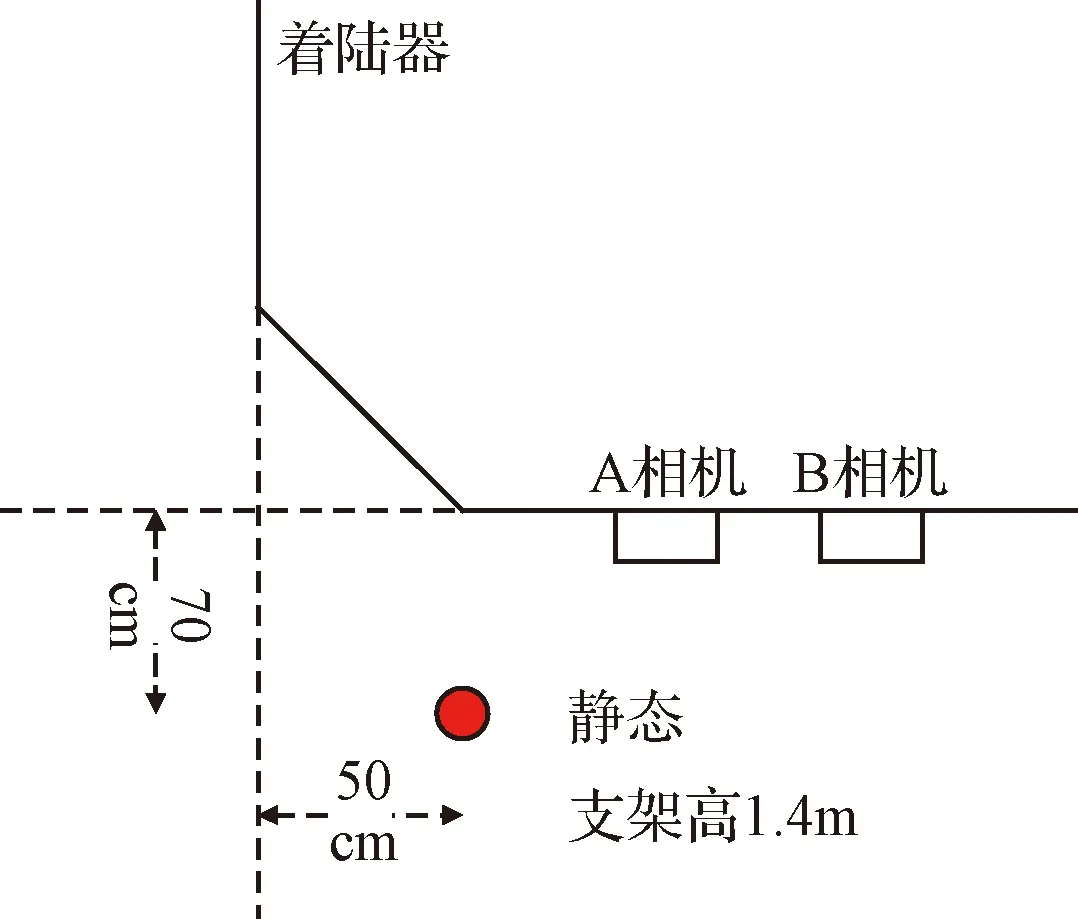
图3 相机标定时标定板与整器位置关系示意图Fig.3 The relative position between calibration panel and satellite
3)拍摄图像数量选择
在应用张正友法时,需拍摄一定数量的图片。为保证标定精度,图像数量不能过少,同时因工程实施过程中的时间和空间限制,图像数量又不能过多。比较了20幅、30幅、40幅图像作为输入的相机标定精度及操作时长,结果见表2。

表2 不同数量图像下的相机标定结果及操作时长Table 2 The calibration result and operation duration for different amount of photos
本次任务要求相机标定重投影误差小于0.2像素。通过表2可以看出,每组图像的标定精度均能满足测量要求。综合标定精度与操作时长两个因素,确定图像数量为30幅。
综上,设计的相机标定策略为:1)选择张正友标定算法; 2)设计尺寸为600 mm×450 mm、角点精度为0.008 mm的标定板,选择标定板的摆放位置如图3所示; 3)选择30幅图像作为输入。
2 适应月面弱纹理的密集匹配
月面呈现弱纹理特征,传统的立体匹配算法会出现匹配精度较差的问题。嫦娥五号探测任务对密集匹配算法的处理效率及精度都提出了较高要求,因此本文针对月面应用场景设计了一种密集匹配算法,基本思路为:首先基于核线图获取稳定的特征点,然后对其他点进行视差插值。算法的具体处理过程如下:
1)通过原始立体图像对,获得核线图。进而基于9×9像素窗口在竖直和水平方向进行Sobel滤波,获得待选像点集的向量,然后通过对该向量的范数运算,获得足够数量的稳健的支持像点,构成集合S;
2)基于支持像点进行德劳内三角化,并进一步根据构成三角形的顶点的视差值进行最大后验估计,插值该三角区域内的其他点视差。基于核线校正后的立体像对及支持像点的视差最大后验估计表达式如下:
(3)
3)对立体图进行上述计算,获得视差图。然后对左右视差图像连续性检查,判断相应像素坐标的差值,在满足一定阈值的情况下,可视为视差最优估计。
3 AIT场景下的测量精度验证
为确定整器总装、长途运输等状态后的系统测量精度,需在多个时机开展精度确定工作。AIT在洁净厂房中进行,场地空间受限、研制进度紧张、操作时间有强约束,且出于对探测器安全性的考虑,难以搭建外测系统,因此设计了一种简单易行的精度验证方法。
3.1 测量靶标设计
由于需要在总装厂房、发射场等不同场地进行多次确定测量系统精度,因此除了精度高外,靶标还应具有简单、便携、不易变形、耐磨损等特点。
在像点坐标量测过程中,不同靶标形状决定了不同的像点提取方法。设计靶标遵循以下规则[30]:旋转与改变比例的不变性;明暗区域对比强烈,边界清晰,确保角点提取的稳定性;适应两种以上特征点提取算法(如直线检测、圆检测),确保角点提取的鲁棒性。本文选用图4所示的靶标设计。
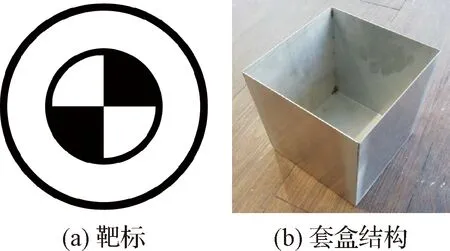
图4 靶标及套盒结构Fig.4 Targets and structure of box
另外,靶标的材质、表面反射特性及加工精度等都直接影响点位坐标的提取精度。在选择靶标制作材料时,基本原则为:表面为漫反射;工艺性好,易加工,且能够保证加工精度;成本低廉,便于获取;耐磨损,不易变形或褪色,使用维护要求低;材质轻便,便于搬运。综合比较了不干胶、金属、玻璃、陶瓷等常用的靶标制作材料,最终选用不干胶作为靶标的加工材料。
布设靶标时,需将靶标粘贴在载体上,进而组成完整的测量靶标。考虑测量靶标的便携性,载体选用套盒结构。根据靶标覆盖相机视场的任务需求,共设计了9个5面正方体套盒,每个面粘贴2个靶标。套盒单面厚度0.8 mm,单棱长度30/28/26/24/22/20/18/16/14 cm。选用不锈钢作为加工材料,确保盒体不变形、耐磨损,可保证测量精度及使用寿命。
3.2 特征点自动提取算法选择
在测量精度确认过程中,对提点的精度有较高要求。由于手动提点不稳定,在选取靶标特征点时会产生误差。为保证特征点提取的准确性,参考当前图像特征点提取的主流检测方法,提出了直线检测、圆检测两种方式。
经典的直线检测算法包括:RANSAC算法(Random sample consensus)、LSD算法(Line segment detector)以及Hough变换算法[31]。综合考虑算法准确性、鲁棒性,本文采用基于Hough变换的直线检测算法。利用Hough算法检测两条直线,在此基础上计算两条直线的交点,实现特征点的精确定位。同时,Hough算法也可适用于圆检测[32],本文的圆检测采用Hough变换算法实现。
3.3 测量精度地面验证方法
利用高精度卡尺测量相邻靶标的距离,并以此作为基准数据。然后应用视觉测量系统测量所有相邻靶标的距离,与基准数据进行比较分析,最终获得全视场内的测量误差。
4 地面验证分析
4.1 自动提点精度验证
通过表3的结果可以看出,采用的直线检测、圆检测方法测量精度均优于0.2像素。且5次提点操作的标准差较小,表明算法稳定性较好。
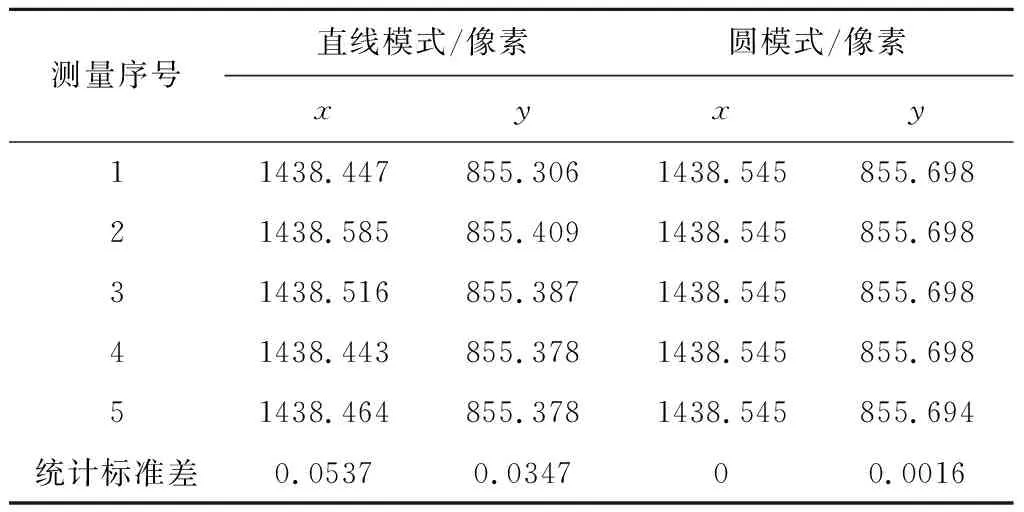
表3 靶标自动选点误差Table 3 The error of auto selection method for the points in the targets
4.2 视觉测距精度地面验证
在任务实施过程中,相机安装位置可能会因经历运输、发射等振动环境而发生变化,将直接影响测量结果,因此在总装厂房、发射场开展了两次视觉测距精度地面验证,以验证测量精度及测量稳定性。测试中应使靶标均匀覆盖相机视场,其分布如图5所示。本文选取了典型的18组测试数据,18组点对在图像中的分布见图5,能够保证点对分布在整个视场内。

图5 靶标布置示意图Fig.5 Distribution of targets
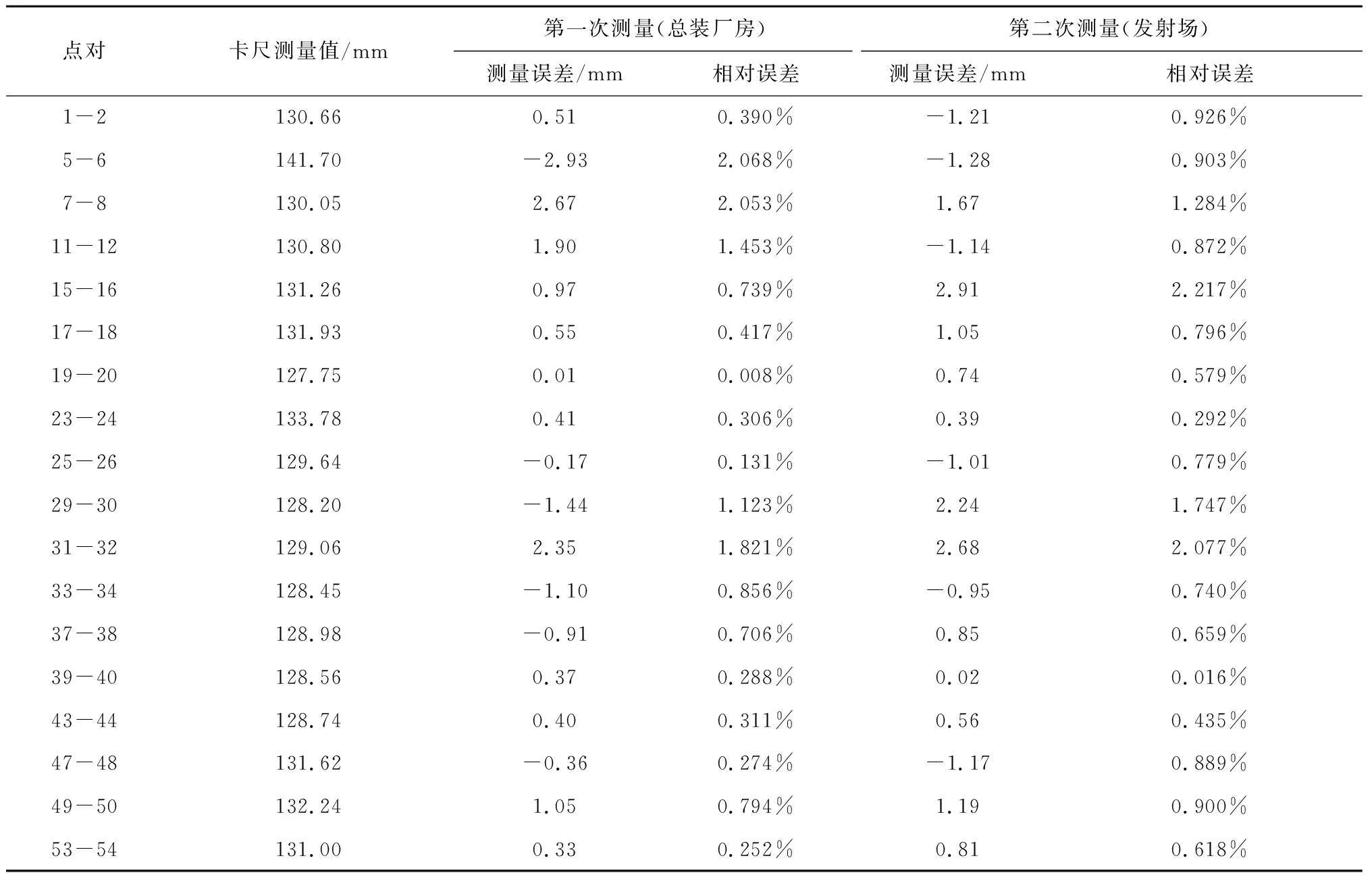
表4 视觉测距测量误差测试数据Table 4 Visual measurement error test datasets
两次测量数据见表4,通过分析可得如下结论:在全视场内,视觉测量精度均能控制在3%以内;视觉测量系统经过运输、总装等操作后,仍能保证较好的稳定性,可满足在轨任务要求。
4.3 三维重建精度分析
在对三维重建精度分析过程中,通过比较49个靶标的三维坐标数据,确定本文设计的视觉测量方法在全视场内三维重建的综合误差小于5 mm。本文选取了13组典型数据,见表5。
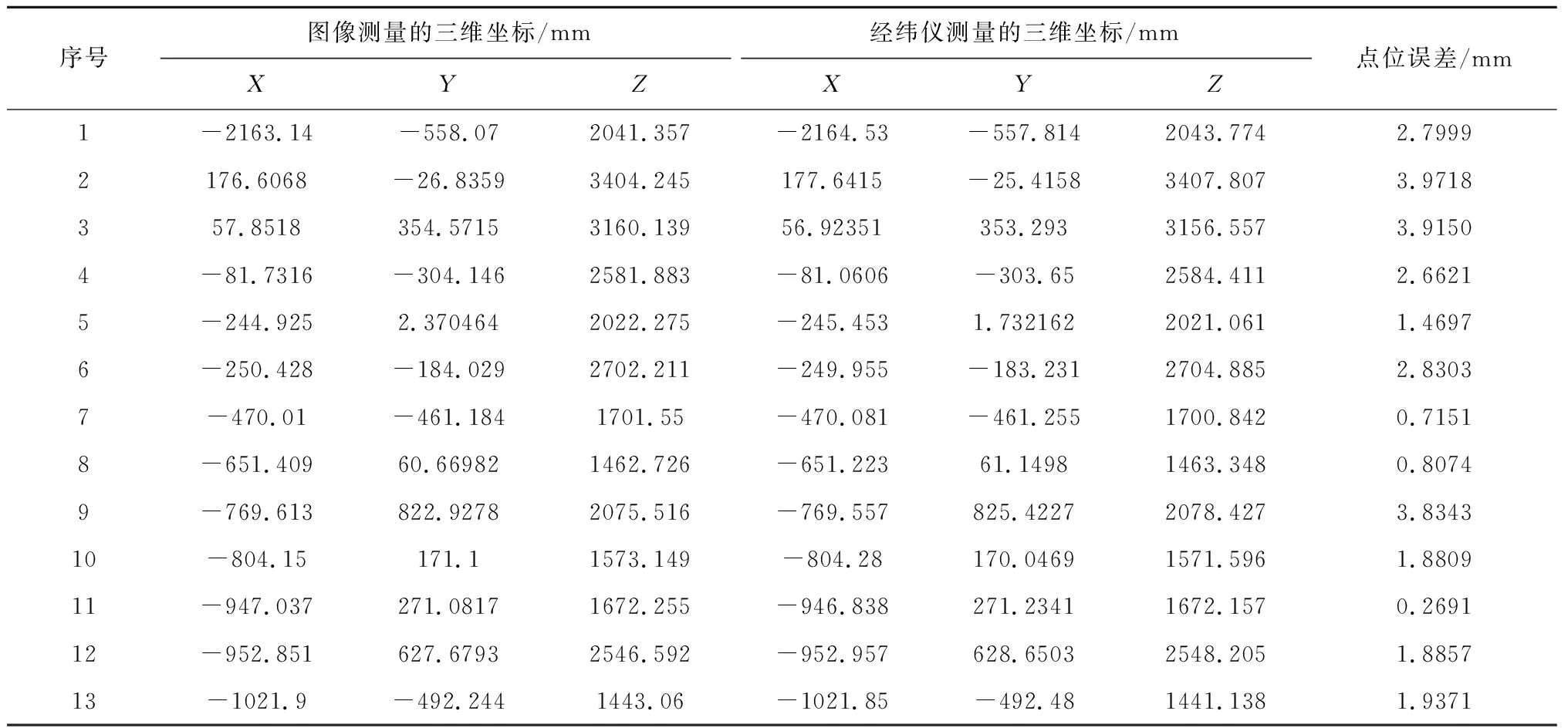
表5 靶标点三维重建精度统计Table 5 The precision of 3D reconstruction
5 在轨应用
嫦娥五号探测器在执行表取采样任务前,利用采样过程监视相机A/B对采样区进行了每秒3帧的静态拍照,获取的彩色照片大小为2352(像素)×1728(像素)。进而利用双目测量系统,对采样区地形进行了三维重建,对采样区内的14个块状物进行了测量。
5.1 采样区地形三维点云重建
在执行采样任务前,对采样区进行了成像,并据此对采样区地形进行三维重建,重建过程获得了核线图如图6所示,然后基于核线图生成了视差图。利用双目测量系统,重建了采样区的三维点云,点云显示效果如图7所示。
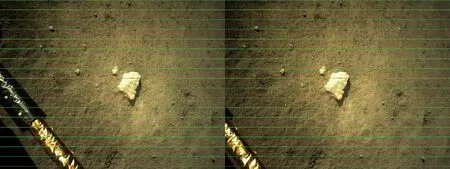
图6 三维重建过程中的核线图Fig.6 The epipolar line image during 3D reconstruction
应用本文提出的快速视觉测量方法对采样区单场景进行三维重建所花费的时间小于1 s,可满足工程需求。因此可判断,本文构建的快速视觉测量方法实现了对采样区地形的快速三维重建。
5.2 采样区景物测量
采样区域的基本情况如图8所示,在相机视场内存在块状物、着陆器支撑结构等景物。采样区域内的块状物对表取采样有一定限制,在规划采样路径时,应考虑对其进行规避。对图中的石块尺寸进行测量,测量结果见表6。

图8 采样区域示意图及块状物编号Fig.8 The sampling area and the stones in the area
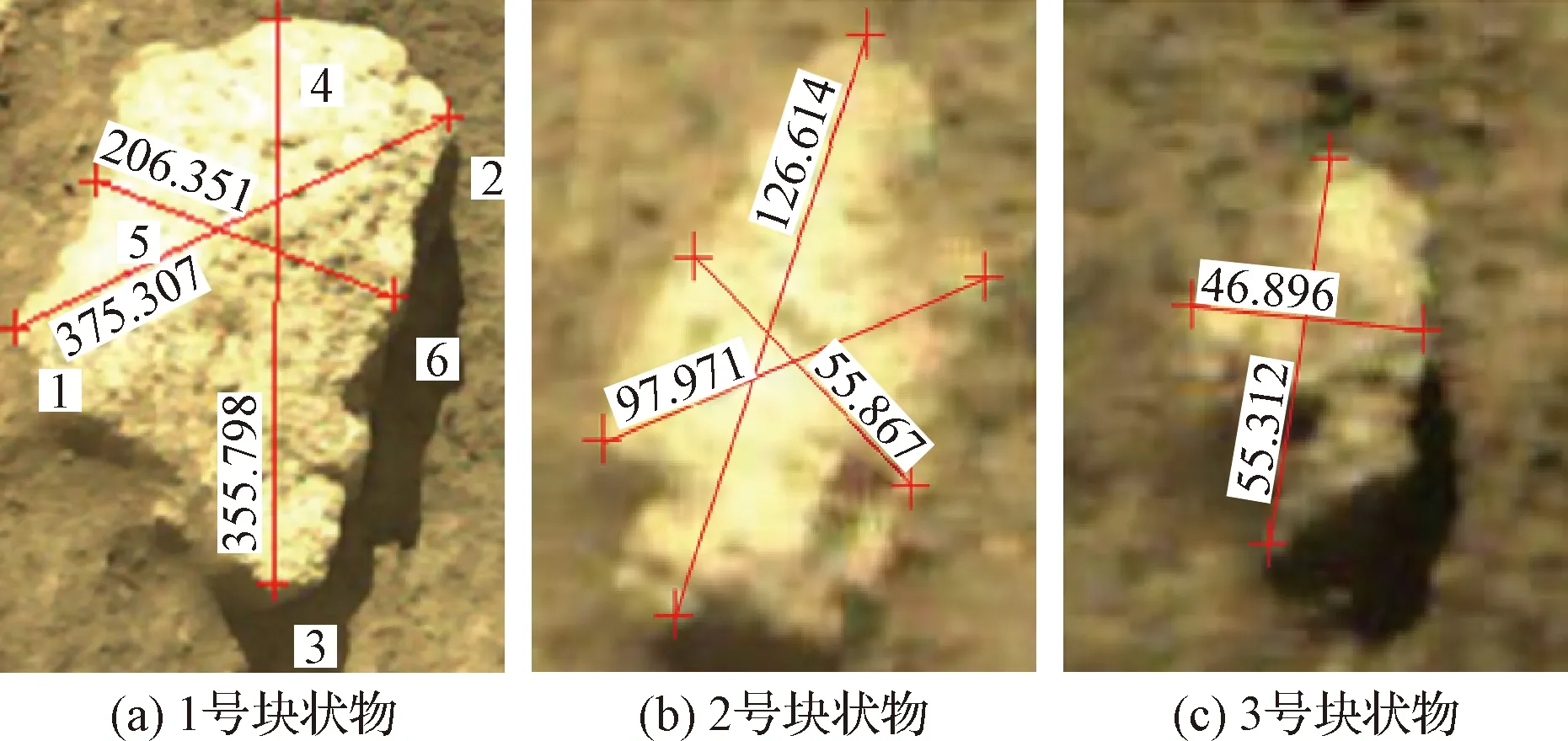
图9 典型块状物的尺寸Fig.9 The sizes of some typical blocks
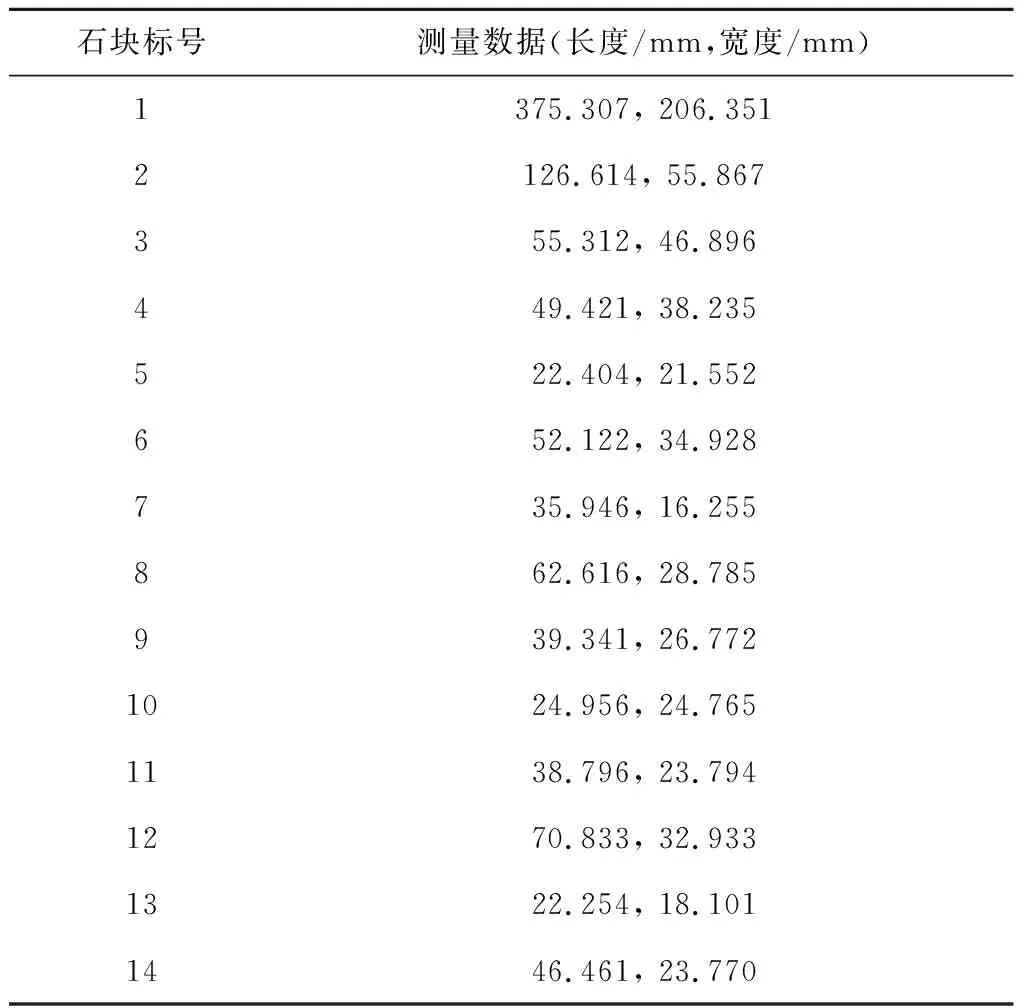
表6 采样区块状物尺寸测量结果Table 6 The sizes of blocks in sampling area
对采样区内的14个块状物进行了测量,其中1号块状物高度约23 mm。
采样区三维重建及块状物的测量结果,支持了采样点选取、采样路径规划等任务过程。
6 结 论
针对嫦娥五号探测器采样任务快速获取采样区障碍物尺寸及三维地形信息的需求,探测器配置了双目立体视觉系统来进行测量。
但由于场地、时间、相机布局等约束,在相机标定、测量精度验证等工程实施时面临着诸多难题。基于此,本文提出了采样区快速视觉测量技术,包括时空受限条件下的相机标定、适应月面弱纹理的密集匹配以及AIT场景下的测量精度地面验证,在地面充分验证了嫦娥五号探测器视觉测量系统的测量精度满足任务要求,并在任务实施过程中1 s内完成了采样区三维地形重建工作,完成了采样区内景物测量,成功保障了嫦娥五号探测器月面采样任务。
