嫦娥五号月球轨道交会对接远程导引轨道设计与飞行实践
2021-10-19汪中生孟占峰
汪中生,孟占峰,高 珊,彭 兢
(北京空间飞行器总体设计部,北京 100094)
0 引 言
中国探月工程第三阶段的嫦娥五号飞行任务于2020年11-12月实施,成功实现月面软着陆和月壤样品采集,并将月球样品带回地球。为实现这一目标,采用了月球轨道交会对接方案来实现样品转移,完成了人类历史上首次无人月球轨道交会对接。本文结合月球轨道交会对接任务的特殊性和中国探月工程的实际工程约束,介绍任务设计阶段开展月球轨道交会对接远程导引轨道设计的考虑,包括远程导引多脉冲调相轨道方案的选择、标称轨道优化设计、轨控策略和误差分析结果以及实际飞行轨道控制的情况。
除了中国的嫦娥五号和载人飞船任务之外,美国、俄罗斯、欧洲航天局都已成功实现了近地轨道交会对接任务,美国还实现了载人月球轨道交会对接[1-2]。从上世纪60年代美、苏两国分别实现交会对接至今,世界上已进行了100多次航天器空间交会对接活动[3]。无人月球轨道交会对接任务的远程导引轨道设计可以参考借鉴这些成功飞行任务的轨道方案。人类历史上第一次空间交会对接是在美国的双子星号飞船和阿金纳号火箭上面级之间进行的。在该任务的远程导引阶段进行了数次变轨,分别实施轨道面内参数(半长轴、偏心率、近地点幅角、纬度幅角)和面外参数(倾角、升交点赤经)的调整,其中轨道面内参数的调整主要在远地点或近地点附近进行,称为特殊点变轨。这一变轨方案也成功应用于美国航天飞机与国际空间站交会对接的远程导引段。采用特殊点变轨的例子还有中国神舟飞船和天宫一号的近地轨道交会对接任务,其远程导引段轨道方案为5脉冲特殊点变轨,其中第5次变轨为可选的组合修正[4]。另一类远程导引段轨道方案称为综合变轨或组合变轨,典型的例子是苏联联盟号和进步号飞船的近地轨道交会对接任务,其远程导引包括5次变轨,每一变轨冲量都包含轨道面内和面外两个分量,这5次变轨一起瞄准理想的远程导引终点(称为初始瞄准点或交班点)状态[5-6]。采用综合变轨的例子还有美国的“阿波罗”载人登月任务和“星座”计划,“阿波罗”任务成功实现了月球轨道快速交会对接,而“星座”计划在继承“阿波罗”任务方案的基础上完成了月球轨道快速交会的初步设计。这两个快速交会轨道方案中初始瞄准点前的飞行轨道均可视为2脉冲变轨方案,每次变轨均包含轨道面内和面外参数修正的分量[7-10]。
与近地轨道交会对接任务相比,月球轨道交会对接任务轨道设计的特殊性在于:除了中心引力场特性不同外,由于地月距离遥远,而且存在月球遮挡,无法对环月轨道上的探测器进行连续监测,所以地面站难以对环月轨道取得和近地轨道观测一样高的定轨精度。具体到嫦娥五号任务,参与任务的测控站较少,能使用的测控资源非常有限。所以,轨道设计中如何利用有限的测控资源来保障任务目标的完成是一大难点。另外,探测器系统所能携带的燃料也受到很大制约,因此如何尽量减少速度增量需求是另一难点。嫦娥五号任务月球轨道交会对接远程导引轨道设计充分汲取了上述交会对接任务轨道设计的经验,在深入分析中国月球轨道交会对接任务特殊性和工程设计约束的基础上,通过改进设计方法和轨道优化设计,制定了适合任务特点的远程导引轨道方案,详见下述分析。
1 远程导引轨道设计目标和设计约束
嫦娥五号任务包括发射、地月转移、近月制动、环月飞行、动力下降、月面工作、交会对接远程导引、近程导引、环月等待、月地转移、再入回收11个飞行阶段,如图1所示。嫦娥五号探测器在完成地月转移、近月制动后,进入200 km高度的近圆环月轨道,然后轨道器和返回舱(轨返)组合体与着陆器和上升器(着上)组合体实现分离,轨返组合体继续在环月轨道上飞行,着上组合体在近月制动后环月飞行的两天内完成环月降轨、动力下降,实现在月面预定位置的软着陆,然后开展约两天的月面工作,采集月壤样品;月面工作结束后,上升器从月面起飞,实施远程导引变轨机动,约两天后飞至210 km高度的圆轨道,位于轨返组合体前方50 km处(简称交班点或初始瞄准点);之后轨道器实施近程导引,完成交会对接和样品转移。此外,在环月飞行和月面工作期间,轨返组合体还要实施数次变轨机动(简称轨道器调相),使得在交班点时刻轨返组合体到达200 km高度圆轨道的预定轨道位置。
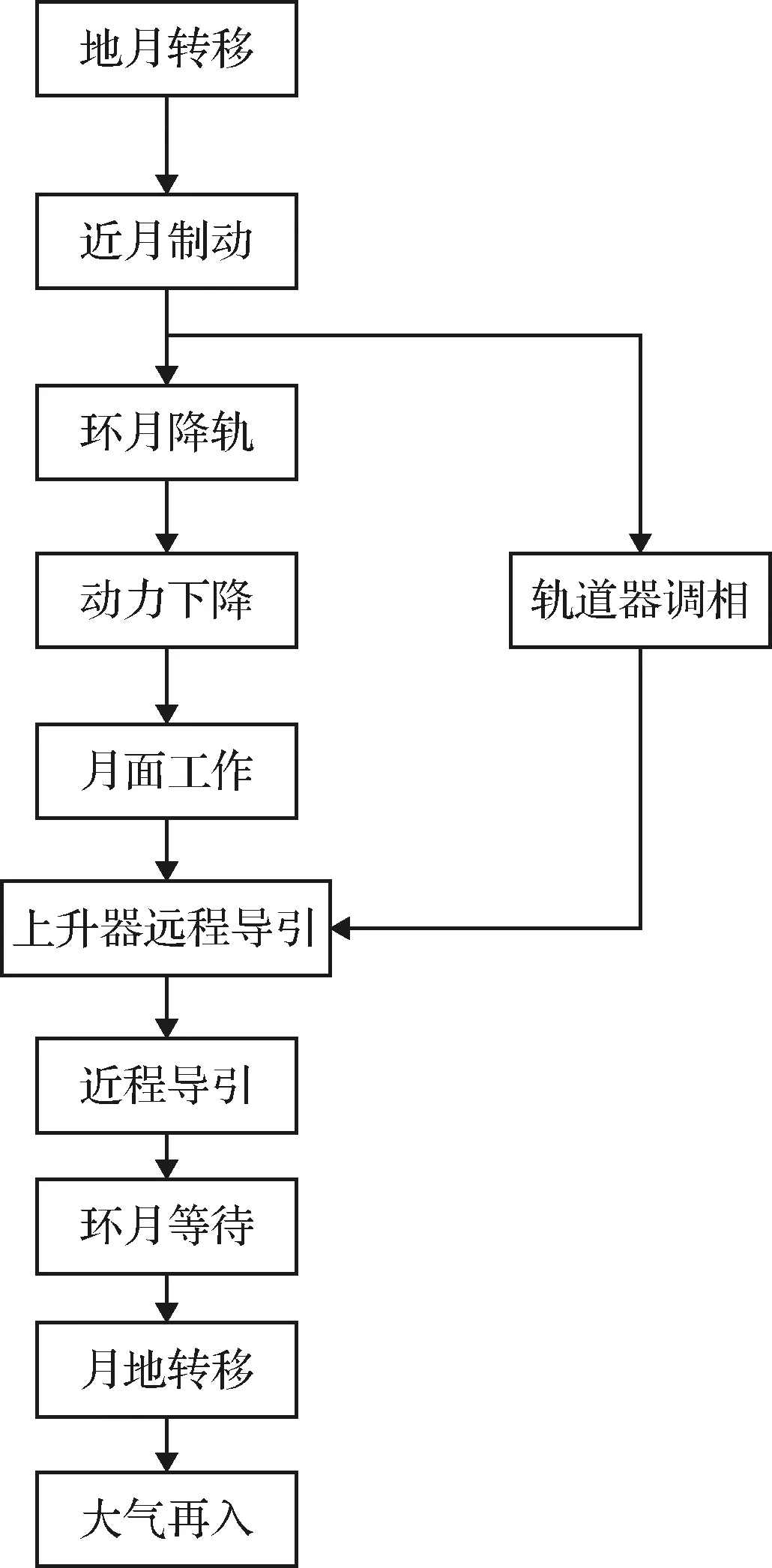
图1 嫦娥五号探测器飞行过程Fig.1 Flight profile of Chang’e 5 mission
月球轨道交会对接远程导引轨道设计包括上升器远程导引和轨道器调相两部分内容。如图2所示,粗实线为环月轨道在月面投影,随着月球的转动,预选采样点S在点A穿过环月轨道面,这时着上组合体实现月面软着陆,月面工作两天后采样点第二次穿过(轨返组合体)环月轨道面时,上升器从月面起飞,实施远程导引。航天器空间交会对接任务一般采用共面发射[11]。理想情况下要求当采样点在B点过轨道器轨道面(共面)时,上升器自月面起飞实施远程导引,是因为这样远程导引轨道面修正所需速度增量接近为零。嫦娥五号任务远程导引轨道设计的目标就是要在1~2天内,上升器经过数次变轨机动,在交班点时刻到达210 km高度圆轨道的预定纬度幅角位置;轨返组合体从环月飞行开始,经数次变轨,在交班点时刻到达200 km高度圆轨道的预定纬度幅角位置;参考图3,交班点时刻上升器位于轨返组合体前方50 km处,二器高度差为10 km,且二器的相对位置和速度满足转自主控制(近程导引)的控制精度要求(图中Rm表示月球参考半径1737.4 km)。需要说明的是,要求在月面起飞后1~2天内尽快完成远程导引,是因为嫦娥五号任务发射窗口的限制,导致越晚完成远程导引,近程导引的测控条件越差,实施对接和样品转移的风险越大。
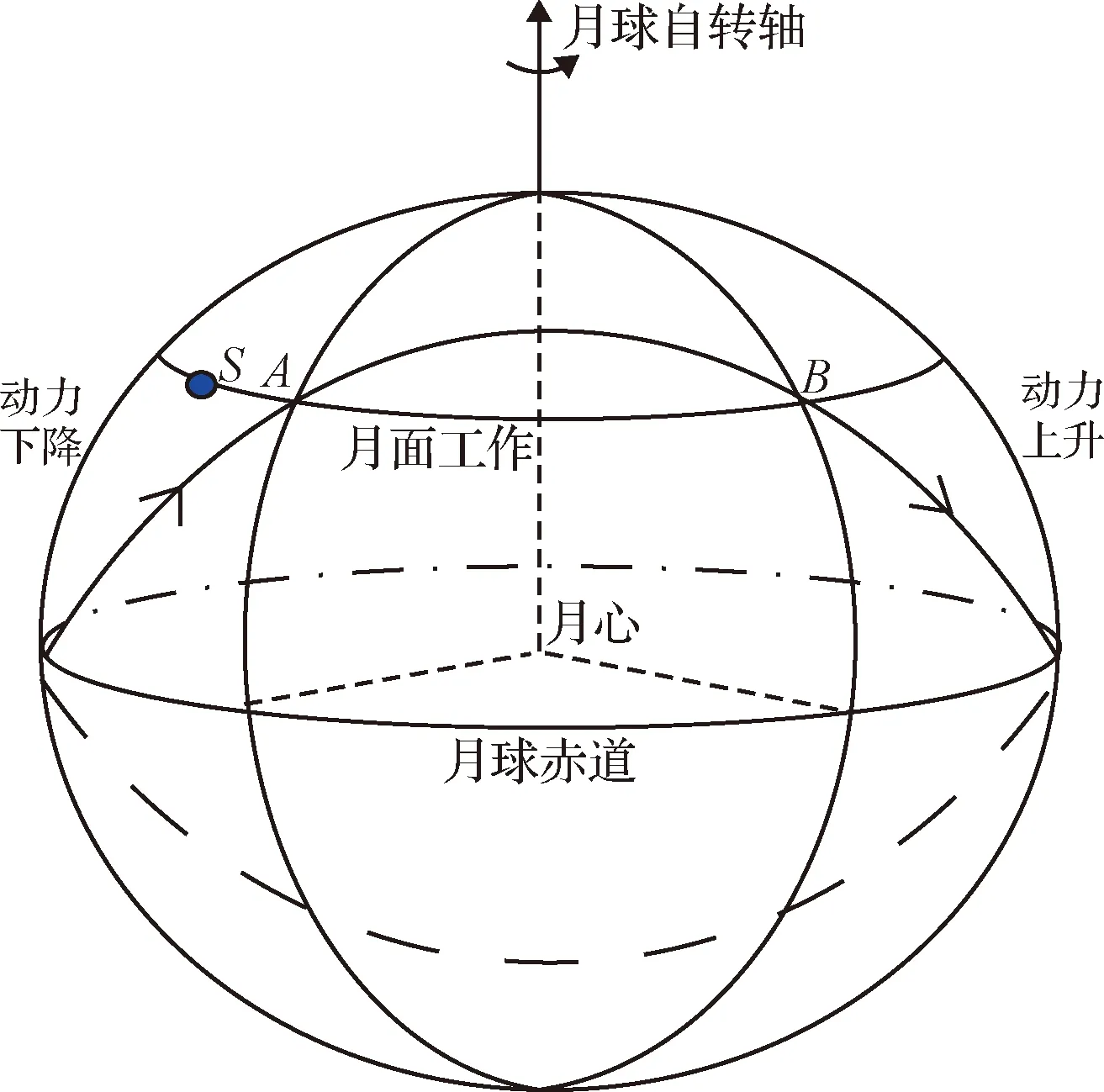
图2 环月轨道和共面起飞Fig.2 Lunar orbit and coplanar ascent
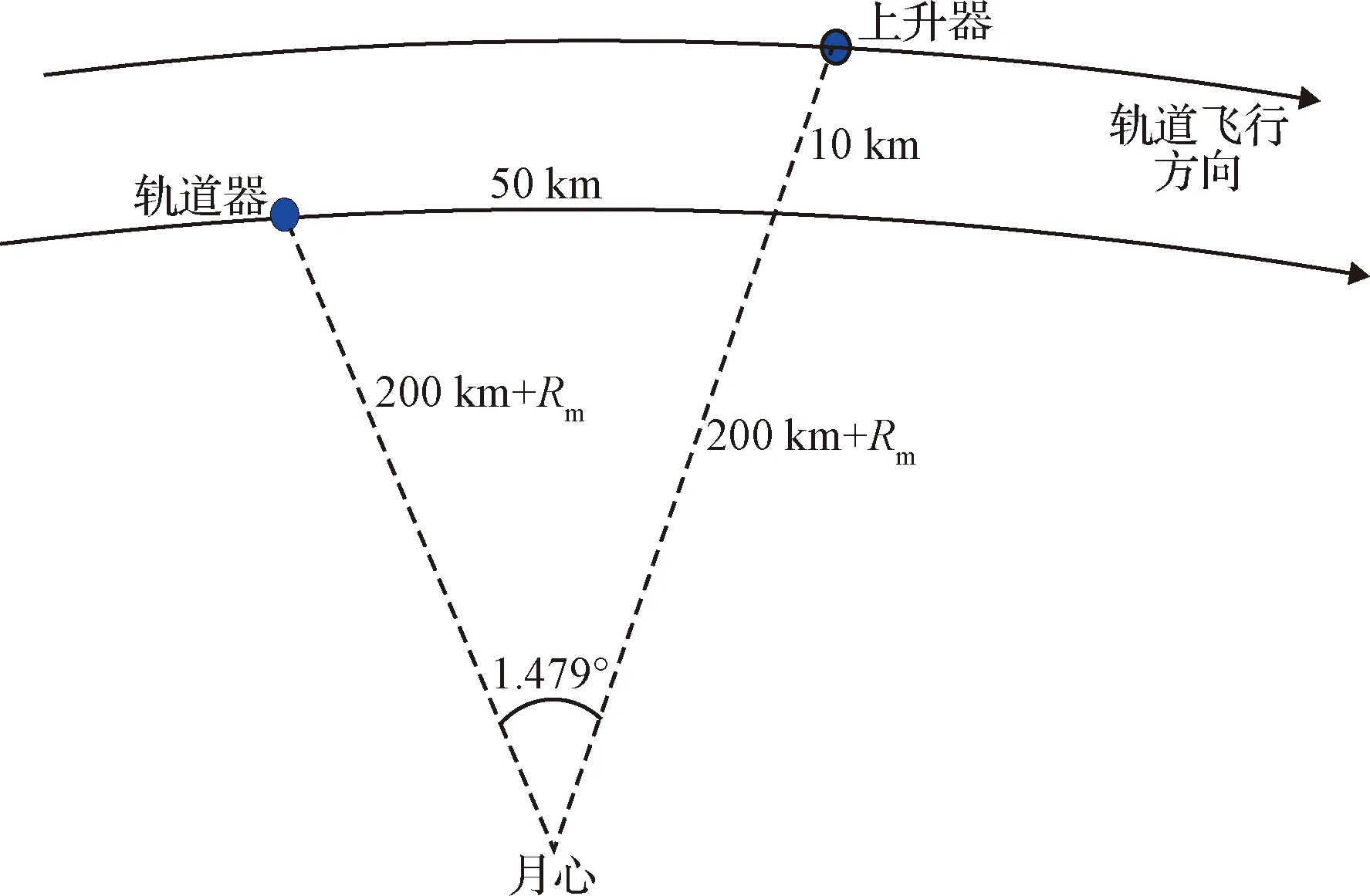
图3 交班点Fig.3 Initial aim point
远程导引轨道设计要考虑的主要约束条件,除了需要满足速度增量预算约束外,还需要保证月面起飞、变轨机动前后、交班点及近程导引的测控条件,两次变轨之间要有足够的定轨弧段来保证一定的定轨精度,使得交班点的轨道控制精度能够满足转为自主控制(近程导引)的要求。其中,月面上升、交班点、近程导引和对接要在国内双站共视测控弧段下进行,而且飞行时序要求交班点和对接点之间的时间约束为3.5 h,对接点所在双站测控弧段时长不小于76 min。
可以看出,远程导引轨道设计的难点在于:一方面要寻找最优性条件,保证总的速度增量需求尽可能小,满足推进剂预算的约束;另一方面要通过优化轨道方案(变轨次数、圈次安排、变轨位置等)设计,来满足测控约束的要求,合理利用有限的测控资源,保证交班点的控制精度。另外,减小速度增量需求的要求和测控约束在轨道设计中耦合,需要改进轨道设计方法,在满足各种约束的前提下实现轨道优化设计。
2 远程导引轨道方案设计
以下重点讨论上升器远程导引轨道方案设计,包括多方案比较分析的结果、交班点设计和标称轨道方案等内容。
2.1 上升器远程导引轨道多方案分析
上升器远程导引过程中,上升器要进行数次变轨,以调整和轨道器之间的相角差,并调整轨道高度和偏心率以及对轨道面进行修正。根据变轨次数的多少,可将上升器远程导引的轨道分为2脉冲方案、3脉冲方案、4脉冲方案和5脉冲方案。如下所述,在嫦娥五号任务轨道设计阶段,对这几种轨道方案进行了多方案比较分析[12-13]。
其中,2脉冲方案的基本原理是基于2脉冲霍曼(Hohmann)或朗伯特(Lambert)变轨,适用于月球轨道快速交会对接任务。美国“阿波罗”载人登月任务中成功实现了月球轨道快速交会对接,其早期采用的2圈方案中初始瞄准点前的轨道就是2脉冲方案[7]。由于这种方案没有调相机动,所以对上升器入轨时和轨道器的初始相角差有严格要求,如果要求能量最优,则上升器月面上升窗口为0,而扩大发射窗口需要增加较多变轨燃料消耗[8]。另外,实现这种月球轨道快速交会方案需要尽早引入相对导航来提高导航精度,所以需要远程相对测量。例如,在“阿波罗”工程中远程相对测量采用了远程交会雷达,而“星座”计划中采用了S频段无线电链路,二者的最大作用距离约为750~800 km[7-10]。如果探测器配备的雷达作用距离过低,则入轨后只能采用惯导设备来导航,导致定轨精度很差,从而远程导引终点的位置速度控制误差很大,无法满足转入近程导引的精度要求,所以这种条件下不宜采用2脉冲快速交会方案。总之,由于2脉冲方案没有调相段,月面发射窗口很窄、燃料消耗较多,且对上升器的入轨误差非常敏感,风险很大,不宜作为嫦娥五号上升器远程导引的轨道方案。
与2脉冲方案相比,3脉冲方案增加了一次调相脉冲,所以对上升器入轨时和轨道器的初始相角差的要求比2脉冲方案宽松。不过,和2脉冲方案类似,3脉冲方案中没有专门的速度脉冲用于平面修正,而是其中两次脉冲均同时包含横向和法向分量,即采用这两次脉冲的法向分量联合修正轨道面。对于嫦娥五号任务来说,上升器入轨时位于近月点,其纬度幅角接近90°,为了实现能量最优的平面内参数调整而采用特殊点变轨,则变轨纬度幅角接近90°或270°,这样的纬度幅角对于平面修正来说不是能量最优的,特别是倾角修正效率很低。所以3脉冲方案也不宜作为嫦娥五号上升器远程导引的轨道方案。
远程导引段的基本方案可考虑4脉冲轨道方案,如图4所示,其中Δv1、Δv3和Δv4为横向速度脉冲,其作用和3脉冲方案中的三个横向速度脉冲完全相同,即用于平面内参数调整。这三次变轨均在特殊点(近月点、远月点)执行,称为特殊点变轨。图中Xkm表示在180 km高度的远月点实施第一次变轨Δv1后轨道另一侧特殊点(近月点或远月点)的高度,其具体数值与上升器入轨时二器的初始相位差有关。采用轨道力学二体公式进行计算,可知这三次变轨总速度增量约为 49 m/s。
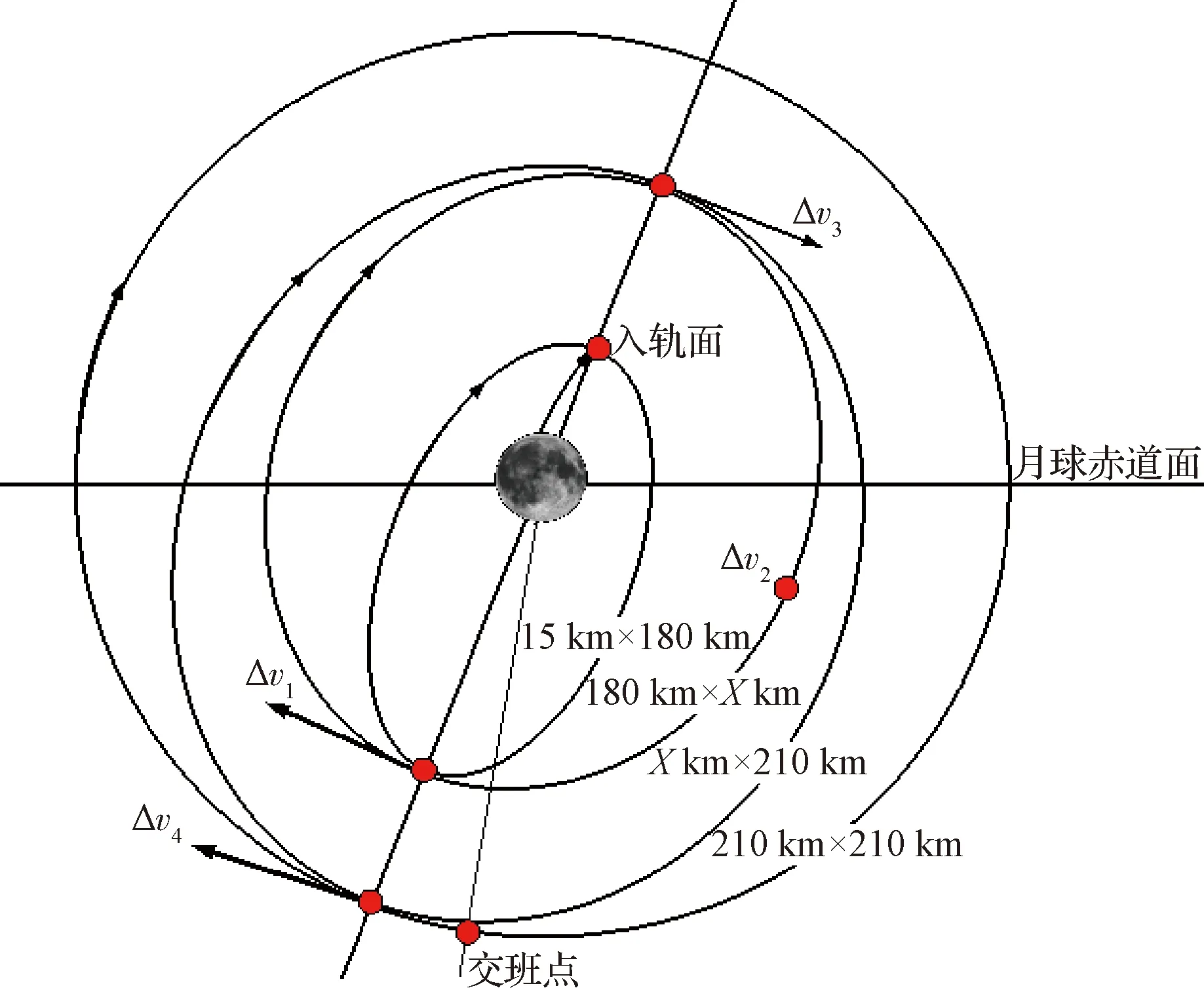
图4 4脉冲方案示意图(地月方向视图)Fig.4 4-impulse scheme (Earth to Moon view)
与3脉冲方案不同的是,4脉冲方案中专门设置了一个法向脉冲Δv2来修正轨道面,其能量最优变轨位置的纬度幅角可通过联立求解下面的高斯摄动方程得到[14]:
(1)
(2)
式中:r2,u2,a2,e2和n2分别为变轨点的月心距、纬度幅角、半长轴、偏心率和轨道角速率。由以上两式消去速度增量并化简,得:
(3)
求解式(3)可得变轨纬度幅角u2的间隔180°的两个解,由于其大小和升交点赤经偏差ΔΩ及倾角偏差Δi的具体数值有关,所以无法事先确定变轨位置和变轨时间。另一方面,由于每圈轨道上可测控弧段对应的上升器轨道纬度幅角范围大于180°,变轨纬度幅角u2的两个解中至少有一个在此范围内,所以可以保证轨道面修正机动Δv2的测控监视条件。
如果将上述轨道面修正由一个法向脉冲完成改为两个法向脉冲完成,即两个法向脉冲分别修正轨道倾角和升交点赤经,而轨道面内参数的修正仍采用3个横向脉冲完成,则得到5脉冲方案。应用这一方案的典型例子有美国航天飞机与“国际空间站”的早期交会对接任务。中国神舟飞船和天宫一号目标飞行器的近地轨道交会对接,其远程导引段采用的也是5脉冲轨道方案[4]。但是,对于嫦娥五号任务来说,由于5脉冲方案比4脉冲方案多一次变轨,连续两次变轨之间的平均轨道圈次较少,会导致部分变轨前的定轨因主要依赖国外测站而无法包含足够的国内站测控时间来实现高精度定轨。所以5脉冲方案也不宜作为嫦娥五号上升器远程导引的轨道方案。
总结以上讨论,研究发现:2脉冲方案的月面发射窗口太窄,且2脉冲快速交会方案要求远程相对测量,相对导航设备必须具备很远的作用距离;对于嫦娥五号任务来说,2脉冲方案和3脉冲方案的变轨纬度幅角接近90°或270°,对于平面修正来说不是能量最优的,特别是倾角修正效率很低;4脉冲和5脉冲方案均有专门的轨道面修正脉冲,能够实现能量最优的轨道面修正,但5脉冲方案中部分变轨前的定轨主要依赖国外测站,无法包含足够的国内站测控时间来实现高精度定轨。综合考虑,嫦娥五号上升器远程导引选择月面发射窗口较宽,能够实现能量最优轨道调整,且变轨前定轨精度较高的4脉冲方案作为基本轨道方案开展设计。
2.2 上升器远程导引标称轨道方案优化设计
确定基线轨道方案为4脉冲方案后,可进一步开展上升器远程导引标称轨道优化设计。在基线方案中,面内轨道参数调整均在特殊点实施。但在实际工程设计中,上升器远程导引轨道设计不但要考虑轨道动力学约束和实现速度增量最优,还要兼顾测控和光照条件的设计要求:为了便于进行实时监控,动力上升、变轨前后、交班点和近程导引应安排在测控弧段内进行;为保证定轨精度,应在每次变轨前安排足够的定轨测控弧段;为了给上升器提供更多的充电时间,应尽量避免在光照区实施变轨,而是将变轨尽可能安排在阴影区。为了同时兼顾实现速度增量最优和满足测控和光照约束,需要研究能够在满足各种约束的前提下开展轨道优化设计的方法。嫦娥五号任务轨道设计研究发现,由于对环月轨道进行测控的特点,月心对测控站可见的开始和结束时间可以作为环月轨道设计的天然时间基准,在此基础上提出了基于月心测控条件分析开展远程导引轨道优化设计的方法[15-18]。
参考图5,为便于说明问题进行简化,假定地面测站位于地球赤道上,且白道面和赤道面共面。初始时探测器环月轨道对测站不可见,但随着地球自转,测站转到图中A点,则环月轨道右侧对测站变为可见,稍后当测站转至B点时,环月轨道的左侧也变为对测站可见,这一过程对应的地心角θ可如下计算:
(4)
其中:rorbit为环月轨道月心距(以200 km高度圆轨道为例),rearth-moon=384400 km为地月平均距离。由此计算可得测站从点A转到点B的时间约为2.3 min。这一时间间隔与月球及环月轨道对同一测站连续可见的总时长(大于12 h)相比是小量,可以采用月球(月心)对测站可见的绝对时间作为环月轨道(非探测器)对测站开始可见的时间,误差只有3 min左右。同样,也可以采用月球(月心)对测站变为不可见的绝对时间作为环月轨道对测站变为不可见的时间。所以,可以不考虑具体轨道特性,计算月心对测控站可见的开始和结束时间,作为环月轨道设计的时间基准。
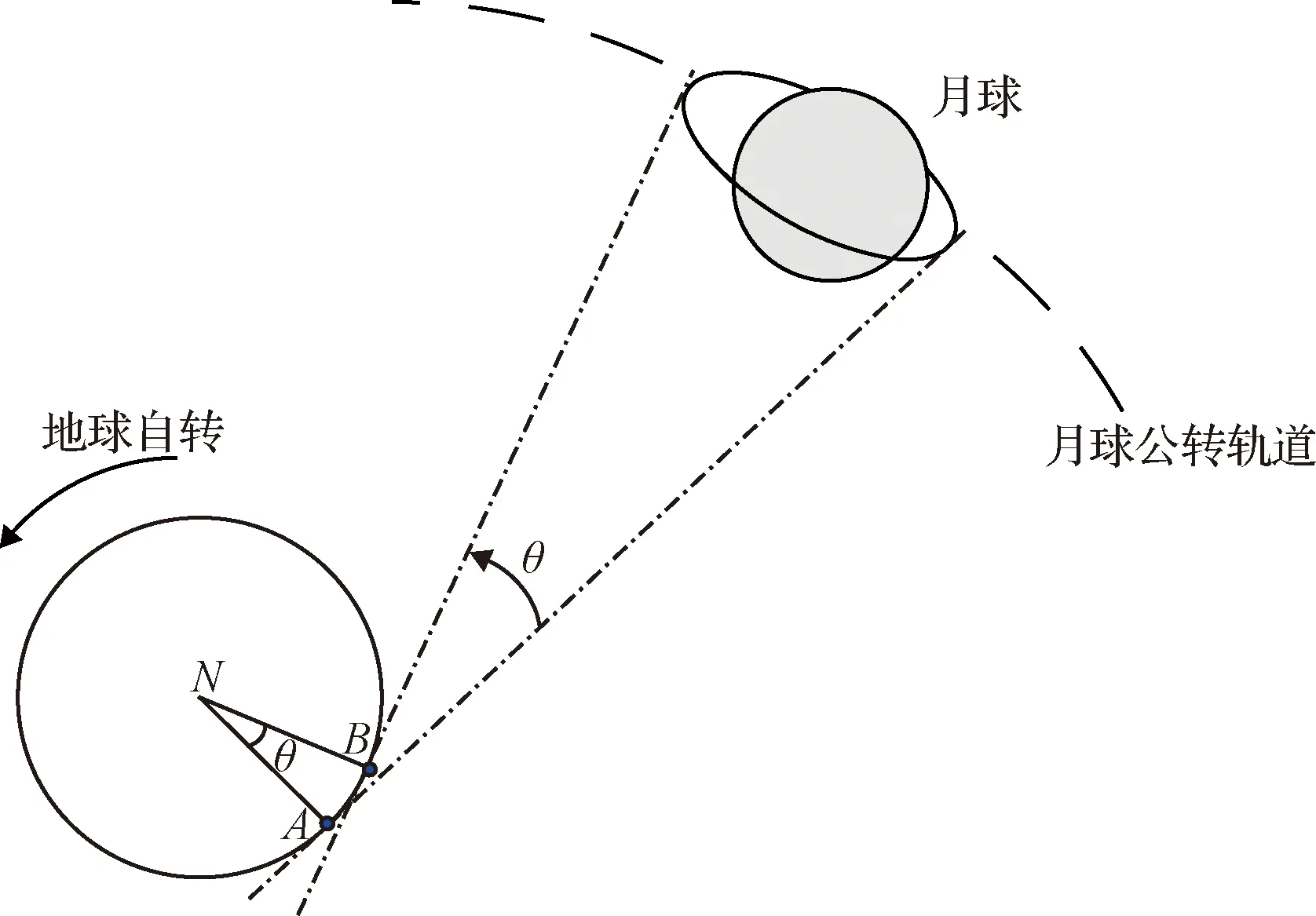
图5 采用月心测控分析作为天然时间基准Fig.5 Tracking condition as a natural time reference
另一方面,探测器在环月轨道上对测站的可见性与所在的纬度幅角相关,每一圈环月轨道上探测器对测站可见的纬度幅角范围可通过轨道数值分析得到。
参考上述分析结论,可以绘制开展4脉冲轨道方案优化设计的测控和光照条件,如图6所示。图中0时刻为月面上升前后具备国内双站测控条件的开始时刻(月心对国内双站可见的开始时刻);时间轴上的矩形区域分别表示两组地面测控站(国内双站和南美站)对环月轨道的可观测时段,其中国内双站能够实现更好的定轨精度;粗实线及其上标注的数字为环月轨道测控可见的部分对应的纬度幅角边界值,即每个时刻对应的两个粗实线之间为可观测轨道弧段对应的纬度幅角范围;阴影区表示了环月轨道位于月球阴影区的部分对应的纬度幅角范围。需要说明的是,图中测控时段的起止时间是按月心的测控可见性(而非上升器的可见性)计算的。
参考图6所示的测控和光照条件对应的纬度幅角和时间范围,在轨道设计中,每次轨道机动的时间应当安排在轨道对测站可观测的时间段内,而且每次机动应当设置在图6所示的纬度幅角范围内,即纬度幅角上下限边值的中间某处:对于椭圆轨道来说,主要是特殊点即近月点或远月点的附近。
为保证每次轨道机动安排在轨道对测站可观测的时间段内,远程导引轨道设计中对变轨圈次进行了细致安排。为满足测控约束和保证定轨精度,经与测控系统协商,制定了“测轨2圈、注入1圈、机动1圈”的原则,即两圈轨道用于定轨,第3圈用于向探测器注入变轨策略,然后下一圈实施变轨机动。采用这一策略对远程导引圈次进行安排,相邻两次变轨间隔至少4圈,加上最后一次变轨后至少需2圈用于惯导注入的测轨,总共需要至少19圈;考虑到入轨、变轨前后、交班点和近程导引的测控要求,根据图6所示测控条件对应的时间范围对各次变轨的圈次进行调整,最后得到远程导引4脉冲方案的圈次安排如图7所示。图中水平轴下的数字表示圈次,各次速度脉冲的上标符号‘t’和‘n’分别表示轨道横向和法向分量。
可以看出,总的轨道圈数为25圈;由于轨道周期约2 h,远程导引的总飞行时间约50 h,满足前述在1~2天内完成远程导引的要求。需要说明的是,第一次机动安排调相机动是为了最大程度提高调相能力,而轨道面修正放在第二次机动是因为从轨道设计理论可知,理论上轨道面修正的误差不会随时间线性扩大;另外,第四次变轨和瞄准点(交班点)只间隔2圈,是为了减小第4次轨道控制后误差的传播时间,减小交班点控制误差。
如图6所示,对各关键点(入轨点、变轨点和交班点)以小圆点进行了标示。根据圈次安排结果,沿水平轴标示了各关键点的参考时间。在图中垂直方向,小圆点的位置标示了各关键点在环月轨道上的大致纬度幅角位置。在图6所示的纬度幅角范围内,可以对变轨位置按照一定的准则进行优化设计,得到满足前述设计约束的入轨时间和变轨策略(变轨圈次、变轨纬度幅角、速度冲量大小),从而得到标称轨道参数。除了总的速度增量最优(前述特殊点变轨方案为49 m/s),这里的优化准则还包括:为保证能量最优和避免大幅度姿态机动,要求所有平面内横向速度冲量为正值;为避免控制误差导致的交班点位置误差过大,要求最后一个速度冲量小于10 m/s;为避免初始轨道太低,要求第一个速度冲量大于30 m/s。
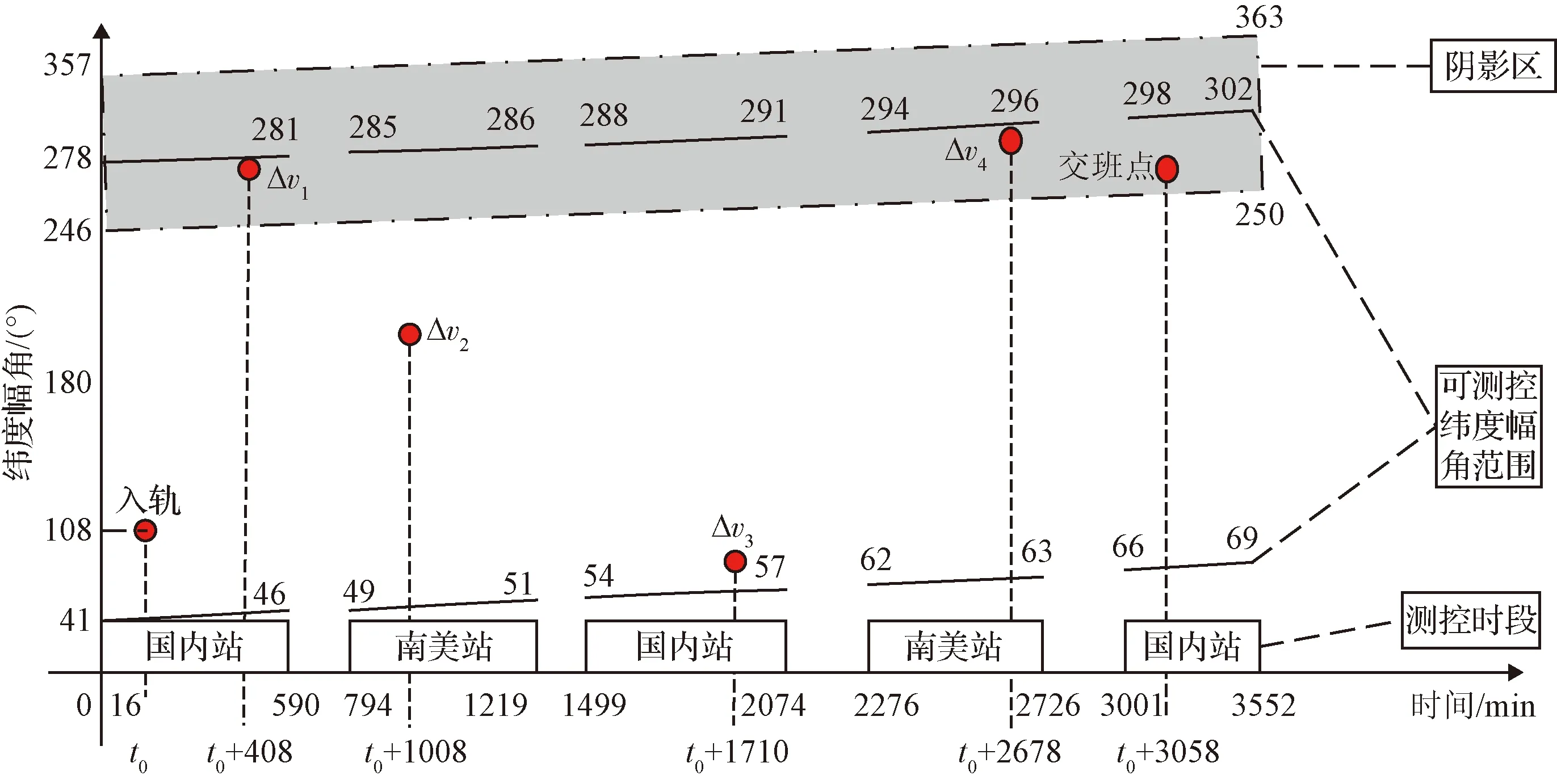
图6 测控和光照条件分析Fig.6 Tracking and lighting condition analysis
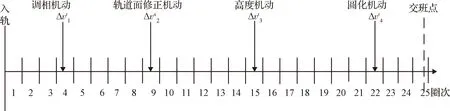
图7 轨道圈次安排Fig.7 Orbit revolution arrangement
至于变轨策略的求解方法,可采用巴拉洛夫的理论或轨道要素变分法求初值,然后在二体模型和精确轨道模型下进行微分修正[12,13,19,20]。以平面内变轨策略的计算为例,拟通过调节轨道面内3个横向速度脉冲的大小和第3个横向速度脉冲的位置来瞄准交班点平面内轨道参数,可采用以下计算平面内变轨速度脉冲的方程:
3α1Δvt1+3α2Δvt2+3α3Δvt3=Δt
(5)
2Δvt1+2Δvt2+2Δvt3=Δa
(6)
2cosα1Δvt1+2cosα2Δvt2+2cosα3Δvt3=Δq
(7)
2sinα1Δvt1+2sinα2Δvt2+2sinα3Δvt3=Δg
(8)
这里式(5)为调相方程,其中αi(i=1,2,3)是各变轨脉冲到远程导引终点(交班点)的相角,Δt描述的是上升器从入轨到飞至交班点的总的相角。也就是说,通过速度脉冲改变上升器在轨的相角位置,使得上升器能在给定的时间飞至交班点所在轨道面内相角位置。式(6)描述了通过速度脉冲调节轨道的半长轴使得其与目标轨道一致,其中Δa为半长轴的改变量。式(7)、(8)描述了通过速度脉冲调节轨道的偏心率矢量(偏心率、近点幅角)使得其与目标轨道一致,其中Δq和Δg为偏心率矢量分量。由以上四个方程计算的速度脉冲为基于小偏差线性化模型的近似值。采用该近似值为初值,代入二体模型和摄动模型进行迭代计算(微分修正)可得到精确的速度脉冲大小。
以嫦娥五号任务首发窗口(2020- 11- 24)为例,上升器远程导引标称轨道设计的结果见表1,其中MCE表示月心平赤道惯性系,MJ2000表示月心J2000系。这里总的速度增量为49.7 m/s,比前面特殊点变轨的结果稍大。显然,这是因为为了兼顾变轨测控条件约束,变轨点并非严格在特殊点变轨。例如,第一次变轨的纬度幅角比远月点的纬度幅角(288°)小了约10°。
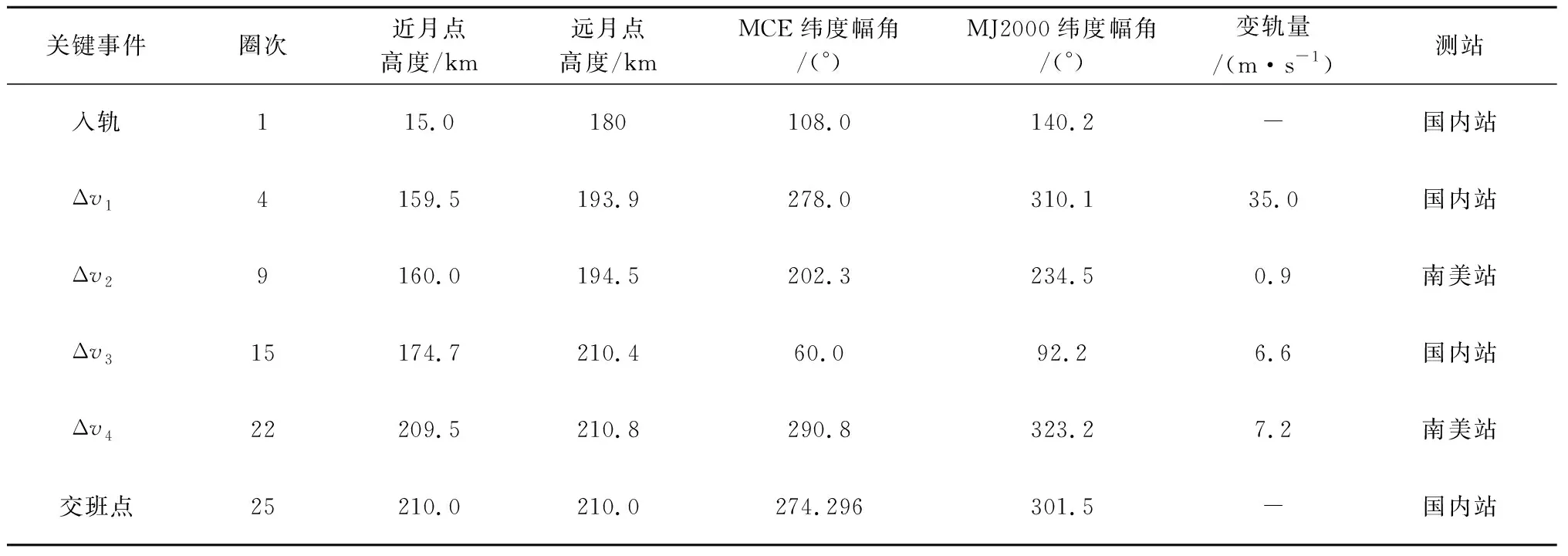
表1 远程导引标称轨道方案Table 1 Nominal orbit scheme of phasing stage
2.3 入轨参数
上升器的入轨时间为预定月面上升发射时刻加上动力上升飞行时间约6 min。这里预定月面上升发射时刻是考虑了动力上升段要求国内双站共视测控条件这一约束而确定的绝对时间,按月心对国内双站可见的开始时刻加上10 min设计。上升器远程导引标称轨道方案中采用的是共面发射,即采样点第2次过轨道器轨道面时发射上升器。通过环月轨道倾角的优化设计,可以使得共面时刻等于月心对国内双站可见的开始时刻加上10 min[15-16]。
考虑到上升器GNC系统能力等因素,在嫦娥五号任务中要求入轨点近月点高度为15 km、远月点高度为180 km,据此可以计算上升器入轨时的半长轴和偏心率。
由于标称轨道方案中采用的是共面发射,可以认为上升器入轨时的初始轨道面和轨道器的轨道面一致,所以取上升器入轨时的轨道倾角和升交点赤经分别等于该时刻轨道器的倾角和升交点赤经。
另外,上升器动力上升段结束时的入轨点为近月点,所以其真近点角为0°。参考图2,上升器在采样点过点B时发射,已知采样点纬度、轨道倾角和动力上升段航程(约250 km),由球面三角公式计算可得入轨点的纬度幅角约为108°。
2.4 非共面起飞和月面上升窗口
在实际飞行控制中,由于落点误差等因素的影响,上升器在预定时刻从月球表面发射时,采样点不一定位于轨道器轨道平面内,另外应急处置等情况下也可能要求提前或推迟月面发射时间。对于非共面条件下的发射,需要研究发射方位角的最优性条件,即计算最佳射向,使得上升器入轨后远程导引轨道面修正所需速度增量最小,保证轨道设计满足推进剂预算的限制。
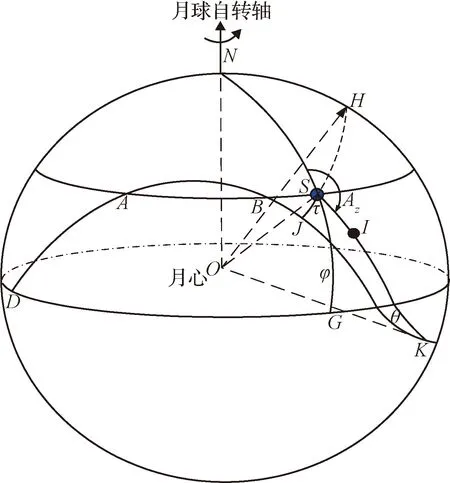
图8 一般条件下月面射向的计算Fig.8 Lunar launch azimuth computation


(9)
可以看出,当τ为直角即发射轨道面垂直于采样点月心位置矢量和轨道器轨道面法向所形成的平面时,则θ最小,此时的发射方位角Az为最佳射向。根据此最优性条件,可采用下列公式计算最佳射向[21]:
(10)

(11)
(12)
得到最佳射向后,根据动力上升制导律或给定的动力上升航程和飞行时间,可计算非共面发射条件下的上升器入轨参数,然后进行远程导引变轨策略计算,得到平面修正所需速度增量大小[21]。考虑到轨道面的进动,可根据式(12)计算的最佳射向初值进行微调,使得远程导引变轨策略计算所得平面修正速度增量大小取极小值并作为最终设计结果。
采用上述方法,计算最佳射向、远程导引段轨道面修正所需速度增量随提前或推迟月面上升时间的变化,结果如图9和图10所示。其中0时刻为共面发射对应的标称入轨时刻。
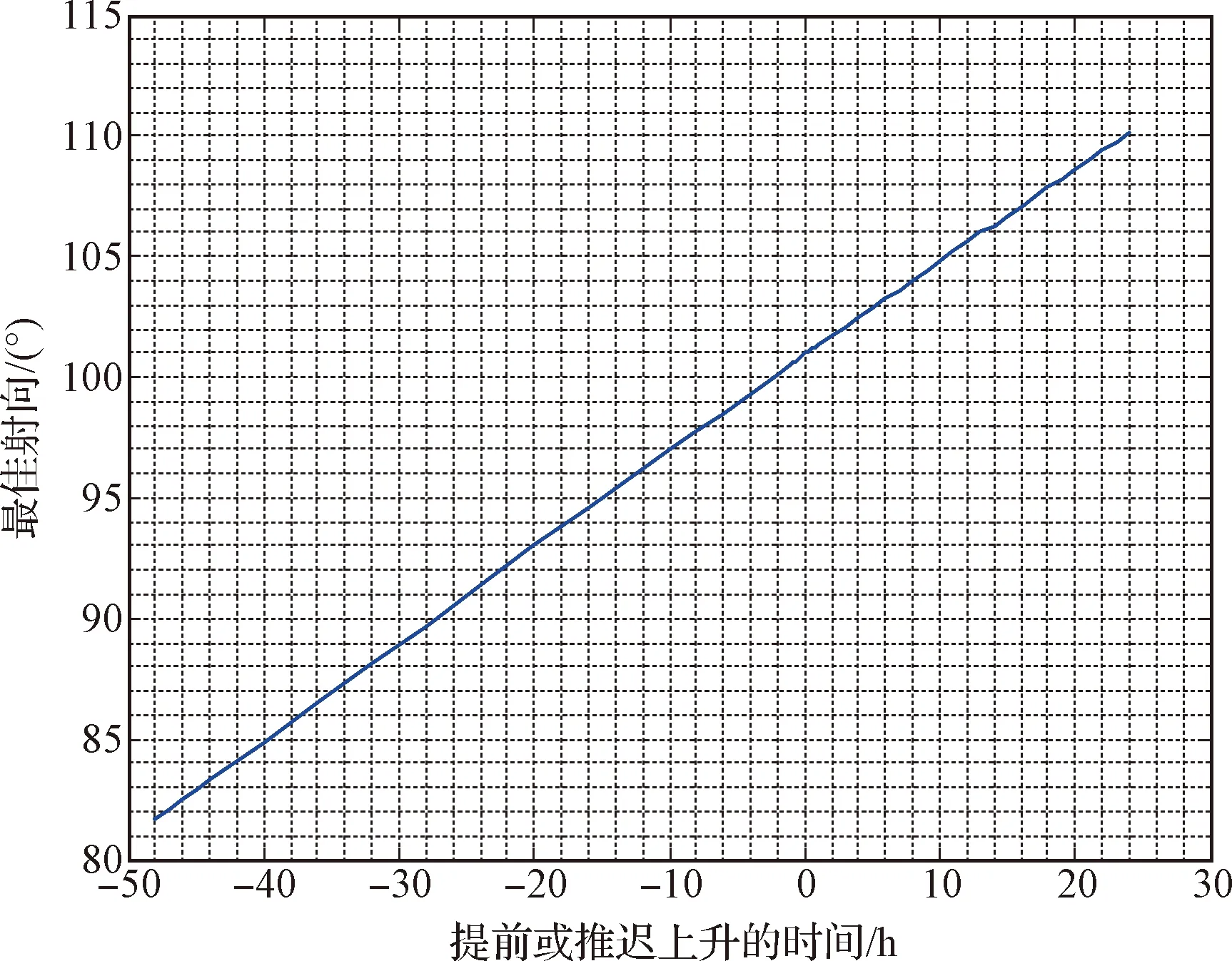
图9 最佳射向随月面上升时间的变化Fig.9 Optimal launch azimuth variation
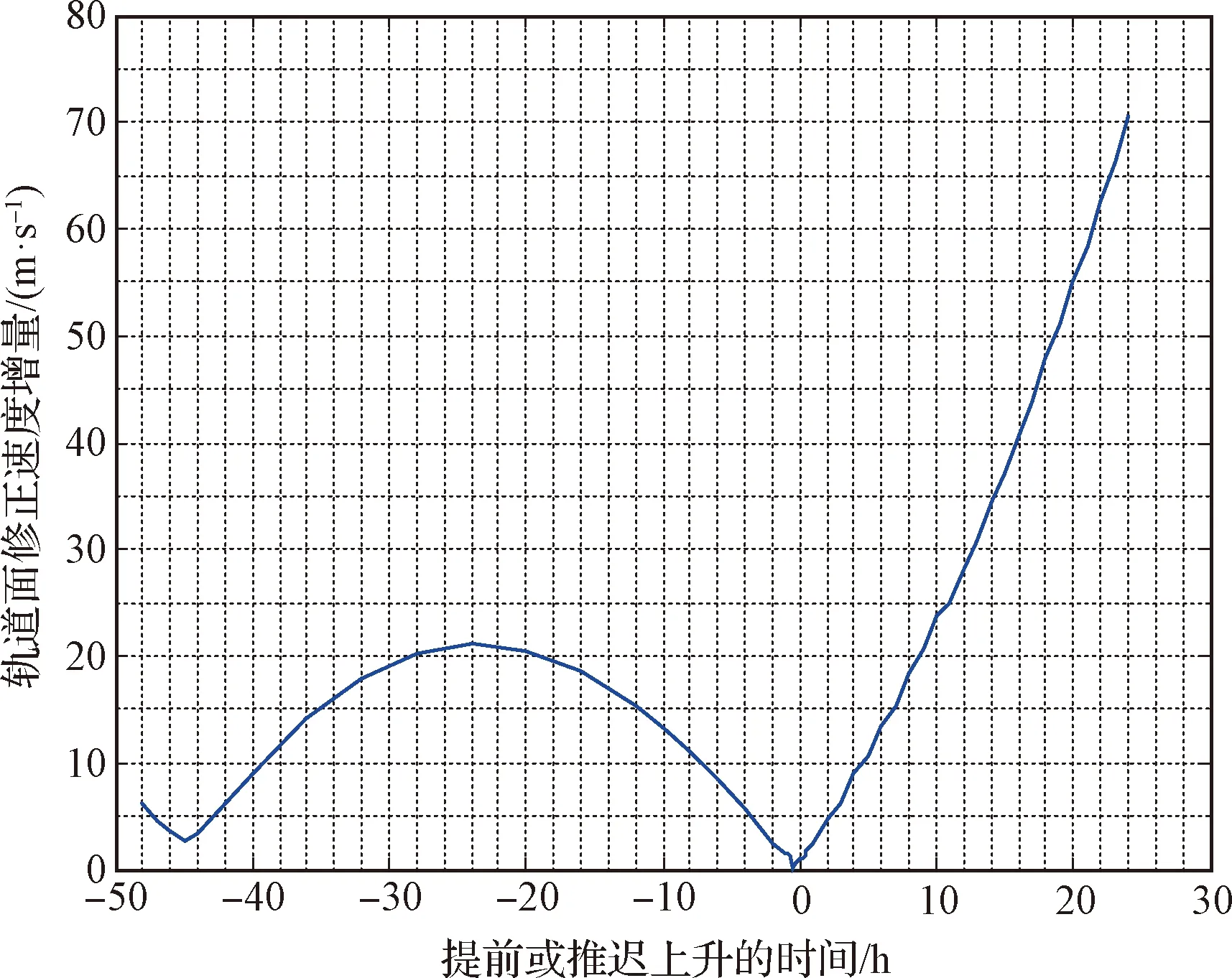
图10 轨道面修正速度增量随月面上升时间的变化Fig.10 Orbit plane correction delta-v variation
可以看出:采用最佳射向设计,如果最大允许远程导引平面修正速度增量为25 m/s,则整个月面工作期间(-48 h, 0 h)任一时刻发射及推迟发射(0 h, +10 h)均可接受。这一时段(-48 h, +10 h)称为月面发射的平面窗口。
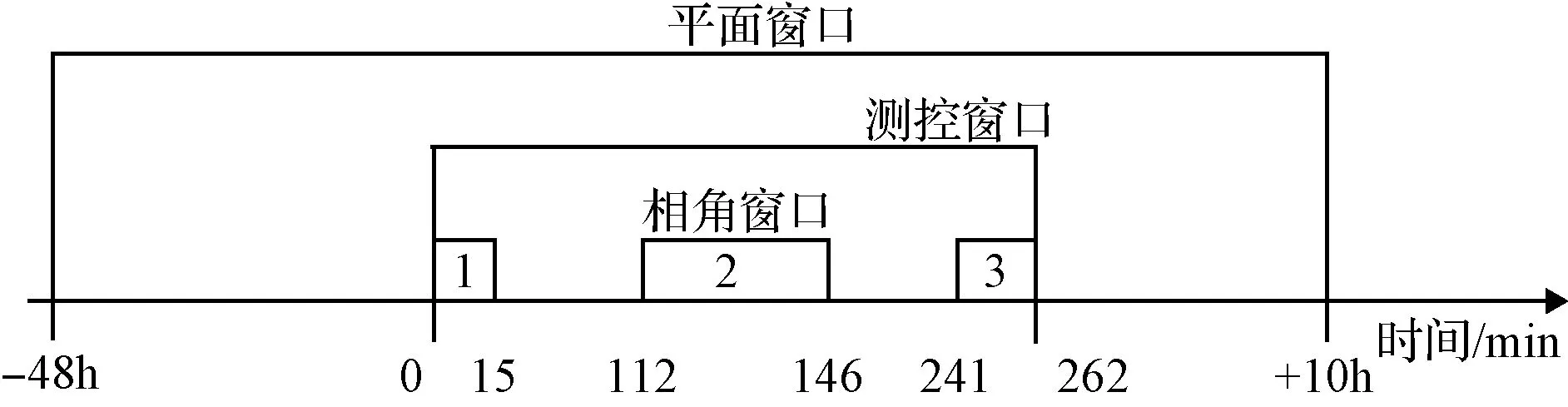
图11 月面上升窗口Fig.11 Lunar ascent window
在美国“星座”计划的设计阶段,是从平面窗口和相角窗口两方面来确定上升器的月面上升窗口[9]。但是,对于嫦娥五号任务月面上升窗口设计,考虑到实际测控条件的限制,还需要考虑增加测控窗口,从平面窗口、测控窗口、相角窗口三方面综合确定上升器的月面上升窗口[12-13]。
测控窗口是指上升器的月面发射时段,对于其中每一时刻,上升器动力上升过程中和入轨后1~4圈均具备国内站测控条件,以便对动力上升过程进行监视、入轨后定轨以及对第一次变轨进行监视。在嫦娥五号任务测控窗口设计中,为了给远程导引第一次变轨留有足够的定轨时间,选择月心对国内两深空站可见的开始时刻加上10 min作为标称发射时刻。分析表明,测控窗口时长约4 h,即测控窗口为(0 h, +4 h)。
相角窗口是指上升器的月面发射时段,在该时段内任一时刻从月面发射上升器,上升器入轨时与轨道器的相角差均位于最佳初始相角差范围之内。这里最佳初始相角差指入轨时上升器和轨道器的纬度幅角之差,满足远程导引变轨机动的所有横向速度冲量为正值,最后一个速度冲量小于10 m/s,第一个速度冲量大于30 m/s等约束条件。
图11给出了月面上升窗口的设计结果,其中0时刻为共面发射即采样点第2次过轨道面的时间。前面已提到,通过环月轨道倾角的优化设计,可以使得共面时刻等于月心对国内双站可见的开始时刻+10 min[15-16]。从图11中可见,上升器月面发射的平面窗口为(-48 h,+10 h),而测控窗口的宽度约为4 h,平面窗口完全包含测控窗口。另一方面,由于上升器入轨时的纬度幅角基本不变,而轨道器每隔2 h(一个轨道周期)左右会飞至同一纬度幅角,所以上升器入轨时和轨道器的初始相位差约每2 h重复一次,从而每隔2 h左右最佳初始相角差范围会重复一次,即每隔2 h左右有一个相角窗口。图11给出了测控窗口内具有3个相角窗口的情况。
总结上述讨论可以看出:在最佳射向计算的基础上,可以适当选择月面上升窗口,以实现轨道设计能量最优,并满足月面上升的测控条件约束和其它设计要求。
2.5 交班点设计
交班点设计的难点在于如何充分利用有限的测控资源,来保障交班点、对接点和近程段的测控条件(国内双站可见)。参见图3,在预定交班点时刻上升器飞至210 km高度、与轨返组合体轨道共面的圆轨道,位于轨返组合体前方50 km、上方10 km的位置,要求相对位置和速度控制精度满足转入自主导引控制(近程导引)的要求。以下先给出交班点相对位置和速度的分析结果,然后讨论交班点时间和纬度幅角的设计。
根据标称轨道设计,轨返组合体的理想交班点轨道参数:半长轴为1937.4 km、偏心率为0、纬度幅角为300°。基于轨返组合体、上升器分别位于200 km和210 km高度圆轨道以及二器飞行方向相距50 km的要求,采用轨道力学和运动学公式,可以计算得到上升器在交班点相对轨返组合体的理想相对位置和速度,见表2。表中‘x’、‘y’、‘z’分别对应径向、横向和法向,下标‘r’表示相对量,所用坐标系为轨道器轨道坐标系。
表2 交班点理想相对位置和速度Table 2 Nominal relative position and velocity at aim point
根据前文中采用月心对测控站可见的绝对时间作为环月轨道设计时间基准的方法,可以方便地进行交班点时刻和纬度幅角设计。参考图12(a),带箭头的直线上方的长条表示根据月心对国内站测控可见计算的绝对时间范围;交班点和对接点之间的近程导引时长约为3.5 h,为保证交班点和对接点均位于国内站测控条件下,可安排近程导引跨越三个测控弧段,每个弧段时长约84 min,相邻两个弧段之间间隔约45 min。
误差分析结果表明,上升器在交班点沿飞行方向的位置控制误差约为6 km左右,则在最大位置控制误差条件下,上升器漂移到轨返组合体前方50 km处需要8 min左右。所以,考虑一定设计余量,可将交班点安排在出弧段前10 min(从弧段开始到交班点约74 min)。图12(a)中交班点所在弧段的开始与月心对国内站测控可见绝对时间范围的开始对齐(前对齐),据此可得交班点的绝对时间。
交班点的理想纬度幅角可通过简单线性插值计算得到。参考图6,交班点时刻附近探测器轨道对国内站可见的纬度幅角范围为[u1,u2]=[69°,302°],对应的测控弧段时长约为T=84 min,交班点位于出弧段前Δt=10 min,则求解下式可得交班点的理想纬度幅角uf=274.3°。
(13)
另一方面,对接点所在双站测控弧段时长要求不小于76 min。从图12(a)可知,若采用前对齐策略,这就要求月心对国内双站测控可见的时长不小于84+45+84+45+76=334 min。但是,对于部分发射窗口,月心对国内双站测控可见的时长小于334 min,这种条件下可考虑后对齐策略,如图12(b)所示。从图中可以看出,采用后对齐策略时,交班点和对接点所在测控弧段均有部分时长为国内单站可见,分别为4 min、8 min。
图12 交班点设计示意图Fig.12 Aim point design
可以看出,应用采用月心对测控站可见的绝对时间作为环月轨道设计时间基准的方法,可以充分利用有限的国内双站测控资源,灵活设置交班点时间来满足相关设计约束。
2.6 轨道器调相轨道方案
在环月飞行和月面工作期间轨返组合体需要完成相位、轨道高度和形状的调整,从而保证在预定远程导引交班点时刻取得理想的纬度幅角、轨道高度(200 km)和形状(圆轨道)。虽然轨返组合体通过自由飞行,也能在一定时刻取得理想的纬度幅角,但无法保证在同一时刻使得轨道偏心率近似为零,而且通过自由飞行来达到理想的纬度幅角难以充分利用交班点前后的国内站测控资源。所以,轨道器调相是必要的。
为保证轨道器在预定交班点时刻到达200 km高度环月圆轨道的预定纬度幅角,需要执行至少三次变轨:第一次变轨Δv1在环月降轨机动后实施,目的是调整轨道器在预定交班点时刻的相位角;第二次变轨Δv2和第三次变轨Δv3均在月面工作期间执行,分别调整远月点高度和进行轨道圆化。另一方面,由于嫦娥五号着上组合体和轨返组合体之间通过支撑舱连接,在二组合体分离后的适当时机,需要将支撑舱从轨返组合体抛离。在分析比较的基础上,确定在轨道器调相第三次变轨后抛支撑舱。为了保证在后续飞行阶段中轨道器、上升器和支撑舱的相对距离满足安全性准则的要求而不至于发生相互碰撞,在抛支撑舱后引入一个固定速度增量大小(2 m/s)的沿速度方向的机动,用于调整轨返组合体和支撑舱之间的相位,可视为轨道器调相第四次变轨(Δv4)。轨道器调相的标称轨道方案示意图如图13所示,图中Xkm表示实施第一次变轨Δv1后轨道另一侧特殊点(近月点或远月点)的高度。
采用类似前面上升器远程导引轨道的设计方法,可以针对减小速度增量实现能量最优以及测控条件要求等实际工程约束进行优化设计,从而得到轨道器调相的标称轨道,这里不再赘述[12-13]。
图13 轨道器调相示意图Fig.13 Orbiter phasing scheme
3 轨控策略和误差分析
在前述标称轨道设计讨论的基础上,可以制定远程导引轨控策略,给出根据轨控策略进行远程导引误差分析的结果。其中,交班点误差分析结果是评估前述轨道设计合理性的重要参考。
上升器远程导引段从上升器入轨(15 km×180 km)开始,在测控系统的支持下上升器进行4次变轨,修正与目标轨道参数的偏差,在交班点时刻飞至210 km高度、与轨道器轨道共面的圆轨道上,并位于轨道器前方50 km、上方10 km的位置(交班点)。交班点轨道参数控制精度应满足转入近程导引的要求。为了在远程导引段减小各类误差因素对满足终端条件的影响,需要在每次变轨前对当次及后续的变轨统一进行实时规划。以远程导引第一次变轨规划为例,实时规划的具体方法如下所述。

类似地,可以制定其它三次变轨的轨控策略。上升器远程导引各次变轨的实时规划方案总结见表3。
表3 上升器远程导引实时规划方案Table 3 Phasing maneuver strategy for ascent module
需要注意的是,远程导引第三次变轨后二器存在一定的碰撞风险。在第三次变轨后,上升器的远月点高度从180 km左右增加到210 km,但近月点高度仍低于180 km,所以在第四次变轨将上升器轨道圆变为210 km高度之前,上升器会穿越200 km的轨道器轨道高度。在这一飞行阶段中,若二器相角差很小,则相对距离有可能小于安全距离,从而存在碰撞风险。为此,在轨控策略设计中采用以下碰撞风险规避策略。

在远程导引段,由于入轨误差、定轨误差、控制误差等的影响,实际轨道将偏离设计轨道。为了减小误差对终端条件的影响,将实际轨道维持在设计轨道附近,需要应用上述实时规划方法,在每次变轨前基于更新的定轨数据重新计算后续变轨序列,通过对后续变轨参数的调整来修正误差因素的影响。通过误差分析可以得到远程导引交班点轨道参数的误差范围。
上升器远程导引误差分析需要考虑上升器入轨时的轨道参数偏差、各次变轨前的测定轨误差和轨控误差。应用前述轨控策略,根据给定的入轨误差、定轨精度和控制精度指标进行蒙特卡洛打靶仿真分析,可以评估上升器在远程导引交班点的相对位置和速度的控制精度,分析结果见表4。其中,统计量μ表示均值,3σ表示三倍标准差,min表示最小值,max表示最大值。
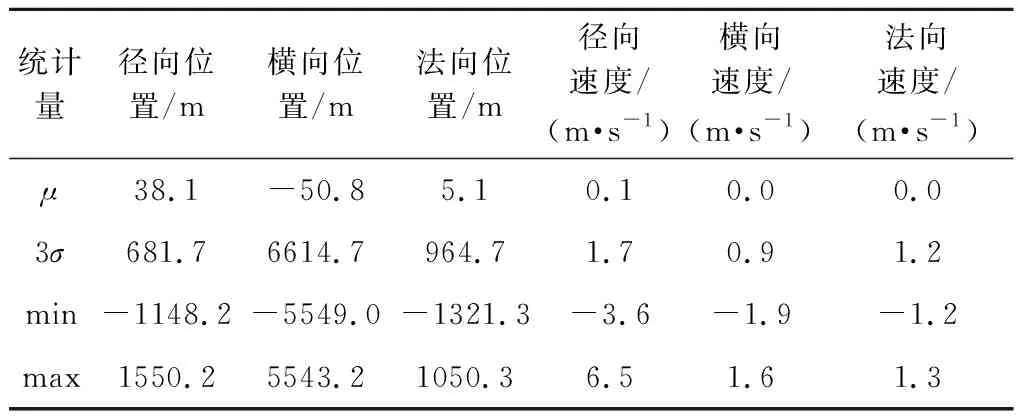
表4 交班点误差打靶分析结果Table 4 Error analysis results of aim point for ascent module
类似地,可以制定轨道器调相的轨控策略,并开展交班点误差分析,结果见表5。
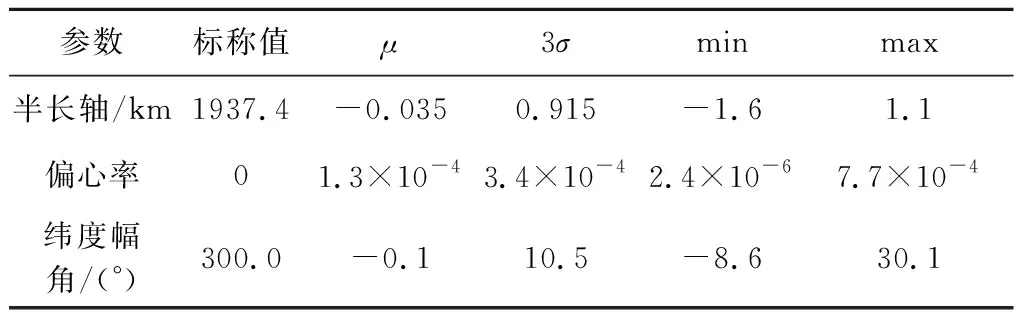
表5 轨道器调相交班点误差分析结果Table 5 Error analysis results of aim point for orbiter
采用上述交班点参数打靶仿真结果,嫦娥五号GNC团队进行了近程导引设计仿真,结果满足近程导引终端控制精度的要求,表明前述远程导引轨道方案设计和轨控策略是合理可行的。
另外,在嫦娥五号飞行试验器的拓展任务阶段,通过引入虚拟目标飞行器,采用飞行试验器的服务舱对远程导引轨道方案的正确性进行了初步在轨验证,并得到了准确的定轨精度数据[22-24]。
4 飞行试验结果
嫦娥五号探测器于2020年11月24日发射,飞行试验期间顺利完成了月球轨道交会对接,包括轨道器调相、月面起飞、上升器远程导引和近程导引等子阶段。以下给出飞行试验的相关数据,并和前述轨道设计结果进行比较。
上升器远程导引的标称轨道和实际飞行轨道比较见表6。
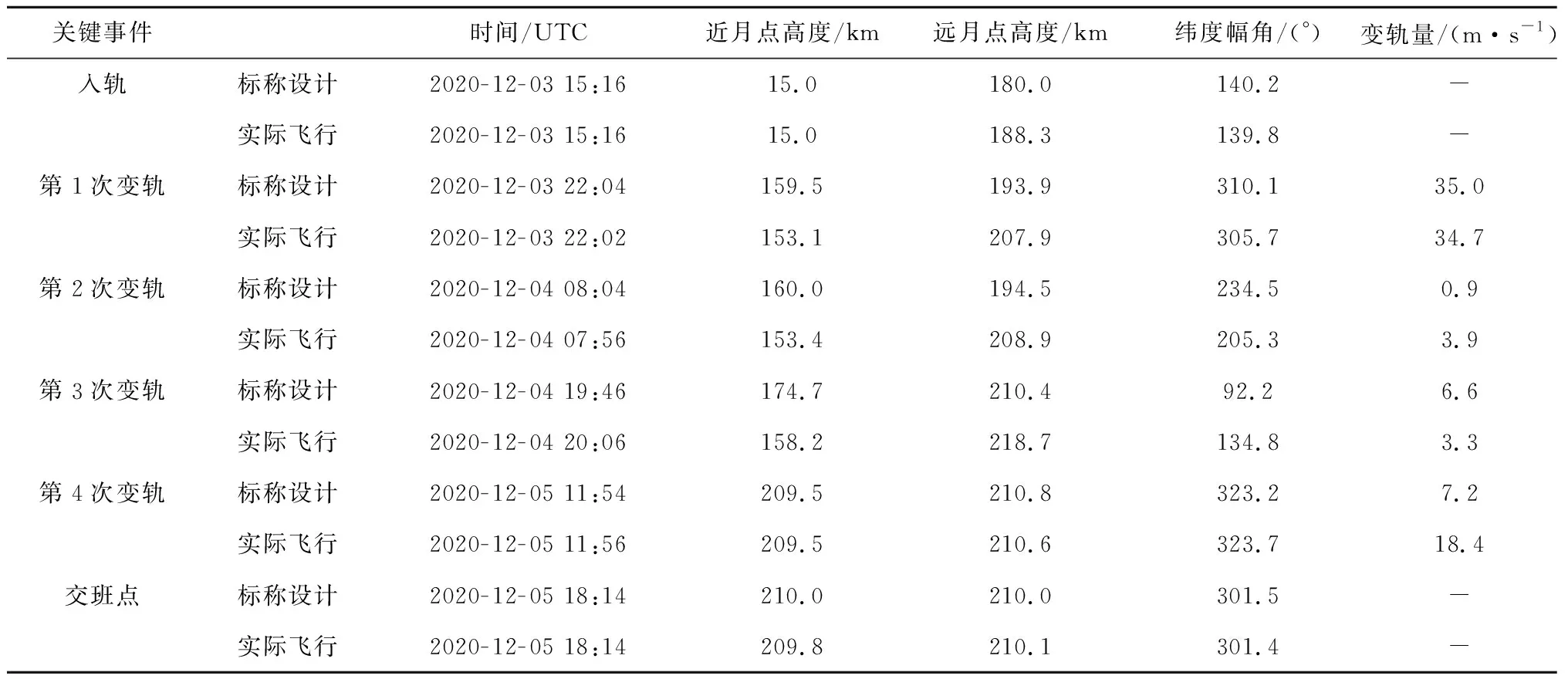
表6 远程导引实际飞行轨道(月心J2000)Table 6 Actual flight orbit of phasing stage
可以看出,由于月面上升入轨参数与标称设计很接近,远程导引实际飞行变轨策略与标称设计基本一致。不过,飞行试验中为了增加第3次变轨前同一测控弧段内的时长,增大了第3次变轨的纬度幅角;为了确保第4次变轨在测控弧段内执行,没有将第4次变轨的纬度幅角用作设计量,而是固定了该变轨纬度幅角和标称设计一致,并增加速度增量径向分量为设计量,由于径向分量的轨控效率较低,所以实际飞行中第4次变轨的速度增量大幅增加。由于上升器推进剂余量充足,这在实际飞控中是可以接受的。第2次变轨的速度增量明显大于标称设计(共面起飞)值,这是因为落月点偏差导致按预定时间起飞时上升器不在轨道器轨道面内。不过,由于落点偏差不大,平面修正速度增量并不大,远小于平面修正速度增量预算值。按预定时间起飞对保障后续测控条件和飞行时序安排很有益处,所以第2次变轨的速度增量是完全可以接受的。
另外,实际飞行中上升器远程导引和轨道器调相的交班点误差分别见表7和表8。比较表4和表5的交班点误差打靶仿真结果可以看出,上升器远程导引和轨道器调相实际飞行的交班点误差非常小,完全满足转自主控制的精度要求。

表7 上升器远程导引实际飞行的交班点误差Table 7 Flight data of aim point error for ascent module
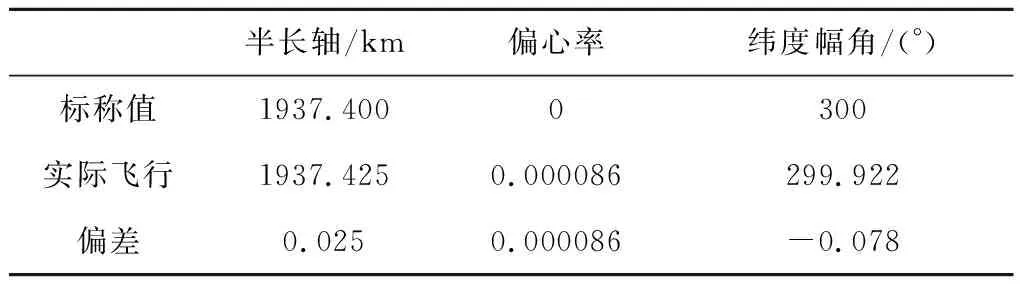
表8 轨道器调相实际飞行的交班点误差Table 8 Flight data of aim point error for orbiter
5 结 论
本文介绍了在嫦娥五号任务轨道设计阶段,根据中国月球轨道交会飞行任务的特点和工程约束进行远程导引轨道设计的情况。在调研远程导引变轨策略设计理论研究成果和成功工程经验的基础上,针对测控条件约束和速度增量最优的设计要求,进行了轨道多方案比较分析和轨道优化设计,确定了远程导引标称轨道方案。为克服月球轨道测控资源和推进剂预算受限的难点,提出了基于月心测控分析进行远程导引轨道设计(包括交班点设计)的方法,实现了对月球轨道有限测控资源的合理利用,并推导了月面发射方位角的最优性条件,得到了月面上升窗口。另外,还制定了相应的轨控策略,给出了交班点误差仿真分析结果。
飞行实践数据表明:嫦娥五号任务月球轨道交会对接远程导引轨道设计是正确合理的,实际飞行的速度增量满足推进剂预算的要求,全飞行过程测控条件良好,交班点控制精度完全满足转自主控制的要求,有力保障了交会对接和样品转移的顺利完成。
