嫦娥五号探测器自主着陆视觉避障方法与评价
2021-10-19华宝成朱飞虎
王 立,刘 洋,华宝成,李 涛,朱飞虎
(北京控制工程研究所,北京 100190)
0 引 言
探月工程是中国中长期规划十六项重大专项之一,分“绕、落、回”三步来实施。继嫦娥三号首次着陆月球、嫦娥四号首次着陆月背之后[1],嫦娥五号首次实现了月面取样返回。2020年12月1日23时11分,嫦娥五号探测器成功着陆在月球正面西经51.8°、北纬43.1°附近的预选着陆区,并传回着陆影像图。已有的月球影像数据表明,月球表面遍布岩石和陨石坑,为着陆器安全软着陆带来较大风险。着陆器只有具有自主障碍识别和规避能力,才能保证软着陆安全可靠。
在此之前美国的Mars2020着陆火星,主要采用火星MRO HiRISE相机影像在地面分析障碍,生成安全目标地图(STM)作为先验信息,在EDL阶段利用器上的着陆视觉系统LVS(Lander vision system)进行位置估计来确定机动方向和落点位置[2-3]。而嫦娥五号自主着陆避障系统由光学相机和激光雷达组成,避障过程采用两级接力避障的模式,分别采用光学粗避障和激光精避障识别地形粗糙程度,确定最终安全着陆区。相比之下中国的嫦娥五号具有更好的自主性和检测精度。本文对两级避障的结果进行分析。
1 两级避障算法说明
粗避障阶段和精避障阶段采用接力避障的方式配合完成嫦娥五号的月球软着陆。粗避障阶段在1 km高度利用可见光相机进行较大范围和较大障碍的粗检测,剔除直接威胁着陆安全的大障碍,给出粗避障安全点选择结果;着陆器降落过程中进行水平方向机动,至粗避障安全点上方100 m处悬停,激光三维精避障利用激光扫描对天体表面进行精确三维障碍检测,获得并提出较小尺寸的障碍,最大限度地保证着陆安全。
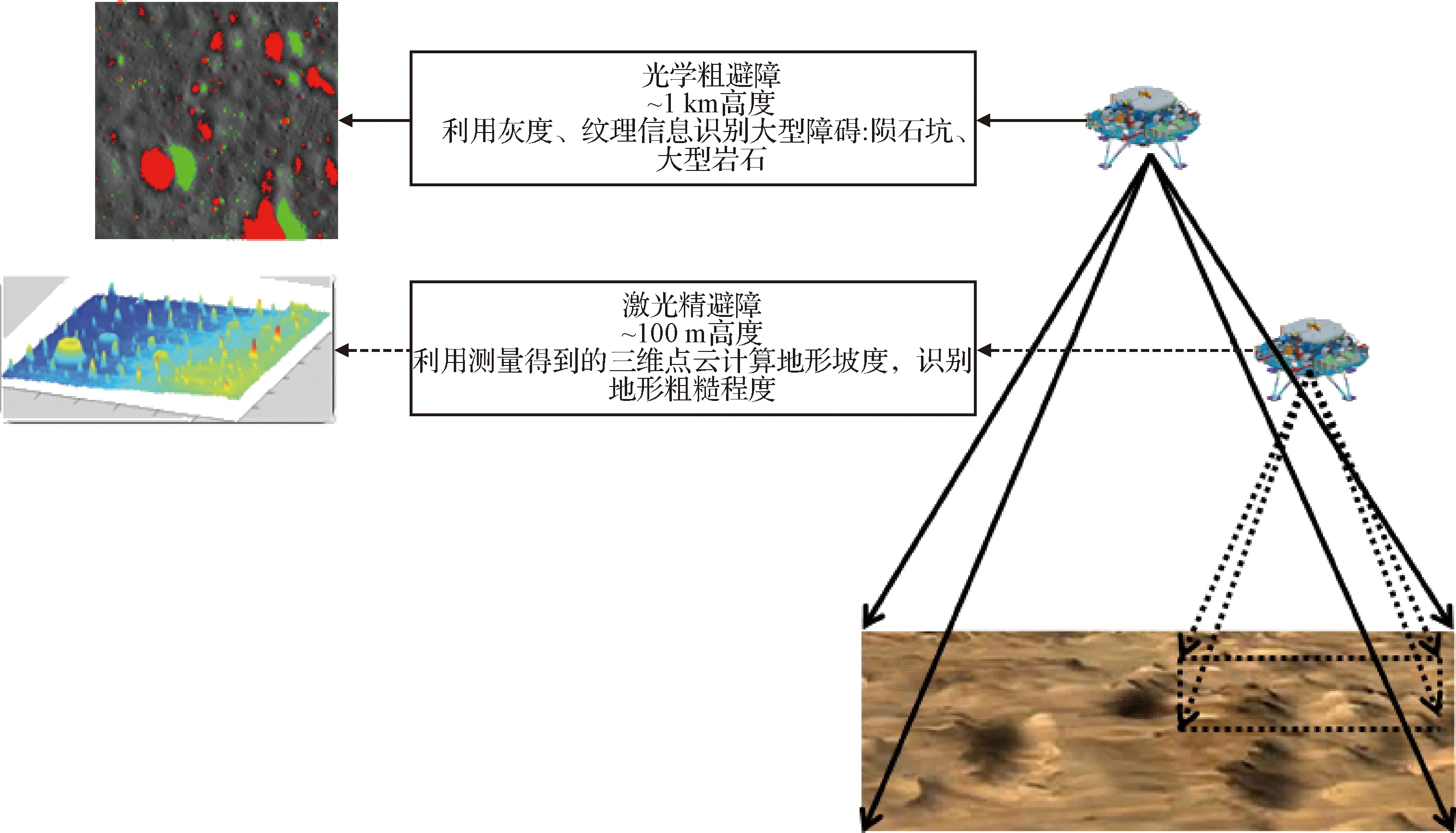
图1 两级避障示意图Fig.1 Schematic diagram of two-phase hazard avoidance
1.1 光学粗避障
在一定的光照条件下,地形起伏在图像中会以明暗变化的方式呈现出来,图像中较黑暗的区域通常都集中分布于陨石坑内的背光面、陡峭斜坡的背光面、陡峭斜坡的背光面或岩石的阴影;而图像中比较明亮的区域则通常是障碍物反射阳光比较强烈的迎光面。因此在较高高度上采用光学相机进行自主避障时,以识别过亮或过暗区域、结合区域纹理信息分析可检测障碍并选择最终着陆点[4-11]。
1)图像阈值分割及形态学处理
常见的阈值分割方法有K均值聚类、最大熵阈值等,基于图像的灰度分布获得表征障碍的过亮、过暗区域,目前该类算法已经成熟。
(1)
式中:H表示所有障碍像素,I表示当前像素,Tlight表示过亮阈值,Tdark表示过暗阈值,‖表示或运算。
仅根据阈值划分出的障碍区域有很多连通域内像素点数很少的小孤立连通域,同时障碍区域其边缘分布着许多细小间隙,不利于后续着陆安全区的选取。因此,首先去掉连通域内像素个数过小的孤立连通域,接着利用结构元素对边缘图像进行形态学闭运算处理,即对分割出来的障碍区进行膨胀,并求取每个障碍区域的质心。
2)基于Delaunay三角剖分的备选着陆点选取
对地形做完障碍与非障碍区的分割之后,接着从非障碍区中选择适合着陆的安全区。在地外星体探测任务的着陆避障阶段可用于障碍检测分析的时间及硬件资源十分有限,不可能逐像素地判断当前区域是否安全。为了提高计算的准确性和实时性,合理有效地利用测量数据筛选着陆点十分重要。上节中已经对阈值分割的结果过滤掉过小的连通域并对分割的障碍区进行了膨胀。已知障碍区域的形状,于非障碍区选择较好的着陆区。
点集的三角剖分对数值分析和图形学来说都是重要的预处理技术,而不规则三角网能够用较少的时间和空间分割复杂的地形。其中Delaunay三角网[12]可完整表达空间目标的形状、尺寸以及目标之间自由空间的形状和尺寸,在地形分析和着陆点的选取中有很好的适用性。
根据Delaunay三角剖分的特征,可对膨胀后的障碍标注图进行三角剖分:利用障碍区域的质心,以质心为端点进行Delaunay三角剖分;而在三角形中,外接圆圆心距离各个顶点的位置相同,可认为该点为距离周围障碍最远的点。因此可以三角剖分的结果为依据、以每个三角形的外接圆的圆心作为初步筛选所得的候选着陆点。如图2所示。
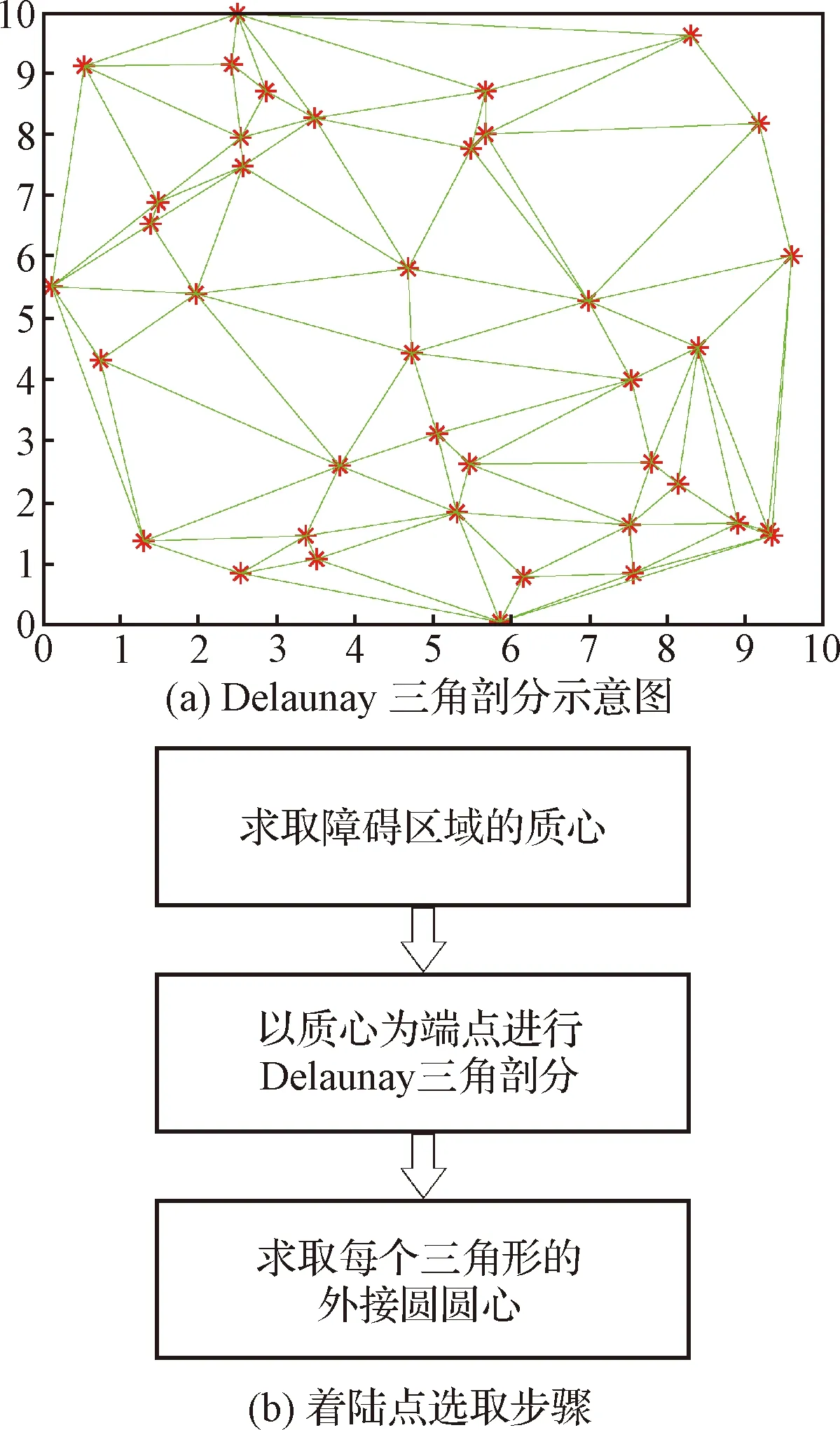
图2 Delaunay三角剖分示意图&基于Delaunay三角剖分的备选着陆点选取步骤Fig.2 Delaunay triangulation schemram & Selection steps of alternative landing points based on Delaunay triangulation
3)备选着陆区的筛选及最终着陆区的确定
上一步已经通过Delaunay三角剖分、求解每个三角形外接圆圆心的方式筛选出备选着陆圆的圆心,候选着陆区从该点为中心向外拓展半径r的区域中选取。由三角形的性质可知:圆心会尽可能远离障碍区域质心,但在搜索过程中随着半径的增大,会不可避免地圈入较小的障碍像素,故而令备选着陆区中包含的2·r+1的区域中细小的障碍像素点数少于所选区域像素的0.005%,即:
NBlockHazard<(2·r+1)2·0.005
(2)
式中:NBlockHazard表示障碍像素数目。
如果当前半径条件下,该区域的灰度状况满足式(2),则令r⟸r+2,重复式(2),直到找到当前圆心所在的最大着陆圆并记录当前半径值。从而得到备选着陆圆。
最后综合考量候选着陆区的纹理特性、区域大小、区域中心距离图像中心远近程度、以及着陆区中障碍所占的比重,据此给定区域的最终安全系数P为:
(3)

最后依据最终安全系数P对着陆区域进行排序,选择值最大的区域作为最终的着陆区。
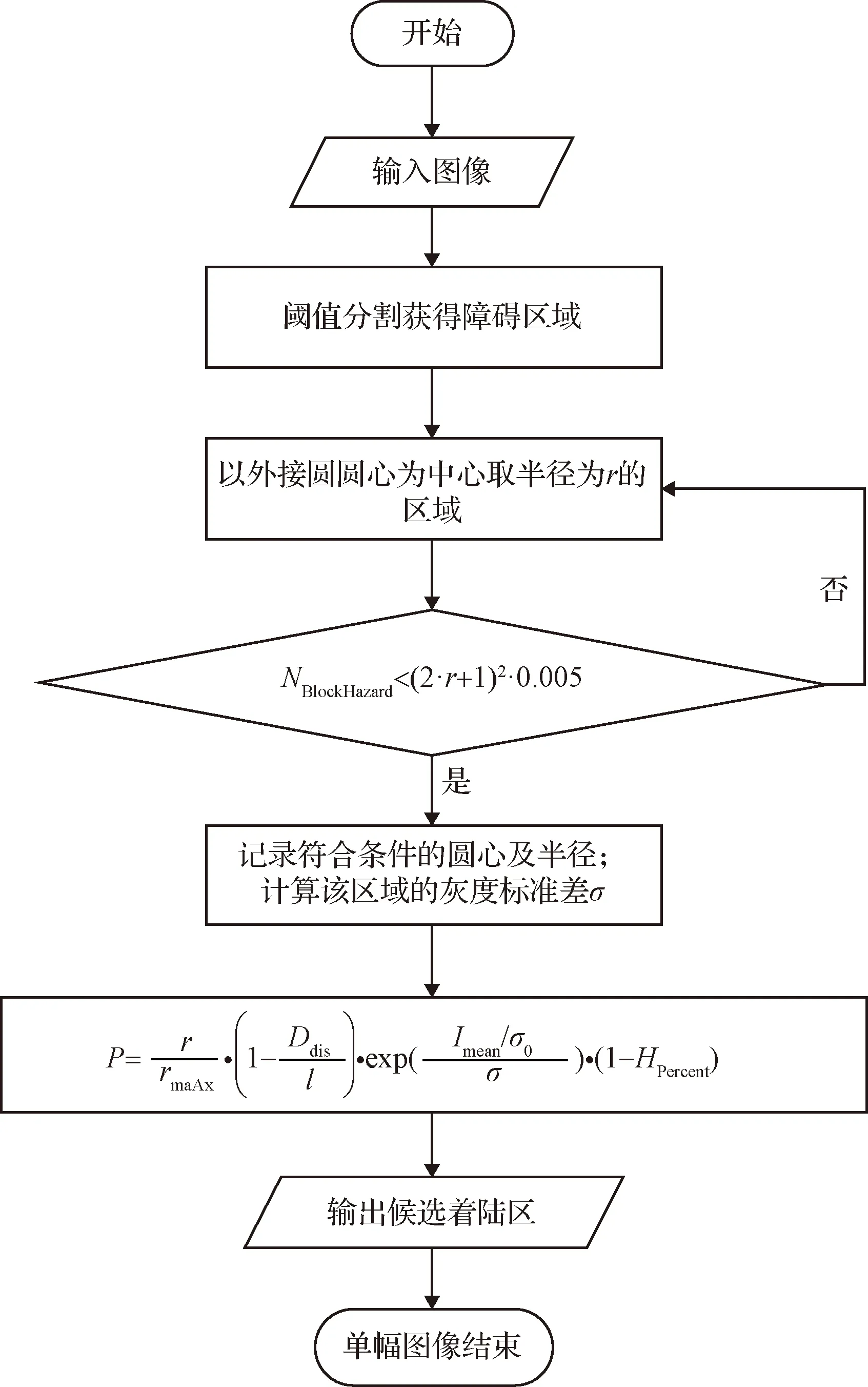
图3 光学图像落点选择算法流程图Fig.3 Flow chart of landing point selection algorithm of optical image
1.2 激光三维精避障
在较低高度进行精避障需要识别分布广泛的岩石、小陨坑、斜坡等障碍。激光雷达(Light detection and ranging sensor, LDAR)根据激光脉冲往返飞行时间或激光相位差实现测距,并借助扫描装置或泛化光学器件快速测量LIDAR到表面多个采样点的距离,从而获取目标表面的三维立体图像,可以方便、可靠地实现障碍检测。
1)坡度检测
在精避障过程中,对于候选区域首先进行坡度检测,判断坡度是否满足着陆条件;继而利用高程起伏检测岩石、陨坑等障碍。目前坡度拟合算法较为成熟,如最小二乘法、特征值法[13];本文提出一种基于DEM数据的坡度拟合方法[14],适用于地外星体着陆,计算实时性高,对于较小坡度检测的具有较好的精度和鲁棒性。
2)粗糙度分析
在坡度检测完成之后,选择坡度符合着陆条件的区域做进一步的分析。计算敏感器测量值与拟合平面之间的差值作为粗糙度,以此为依据对地形进行判断。由于测量噪声的存在,直接设定阈值来检测粗糙度障碍时检测阈值通常会设定得略低于障碍容限,以确保获得更高的检测率,但同时会增加虚警率,从而损失掉原本可用的安全区。利用概率的方法代替阈值,可以在考虑敏感器误差的基础上更加精确地评价着陆区域的安全概率[15]。
基于激光雷达的测量结果,可认为像素点之间相互独立,敏感器的噪声也是相互独立的。这一系列的假设可以使得模型符合贝叶斯理论的使用条件,便于数学计算。令U为着陆器下所有独立像素的集合,D(x,y)为测量到的高程值,S(x,y)为真实高程值,安全着陆就可以表示为:
(4)
定义粗糙度R为三维点到拟合平面的距离。在坡度检测对噪声不敏感的情况下,测量到的粗糙度误差就主要来自激光雷达测量到的高程数据。认为测量的高程误差正比于粗糙度误差:
[D(x,y)-S(x,y)]∝[RD(x,y)-RS(x,y)]
(5)
据此可以针对每个像素粗糙度,将安全概率描述为:
P(D(x,y)|S(x,y))=P(RD(x,y)|RS(x,y))
(6)
着陆安全即为高度在容限T以下,可表征为:
(7)
认为高度噪声服从零均值的正态分布,其标准差为σ。把高斯表达式代入安全概率方程,最终的安全概率可以表示为:
(8)
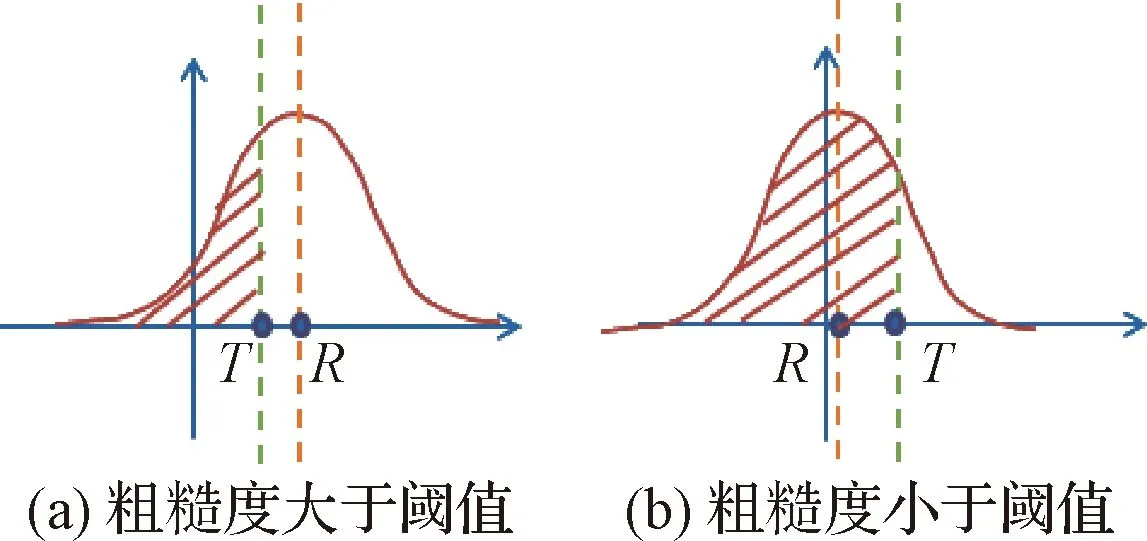
图4 概率模型示意图Fig.4 Probabilistic model schematic diagram
2 嫦娥五号着陆避障在轨情况
如果不进行着陆避障,飞行器以当前状态继续往前飞直至着陆,落点位置如图5中十字所示,即为标称落点。考虑到燃料消耗等问题,最终粗避障候选着陆点将在以标称落点为中心的5°范围内查找。
基于在轨数据,成像结果及粗避障至着陆段飞行轨迹在图像上的投影如图5中实线所示。
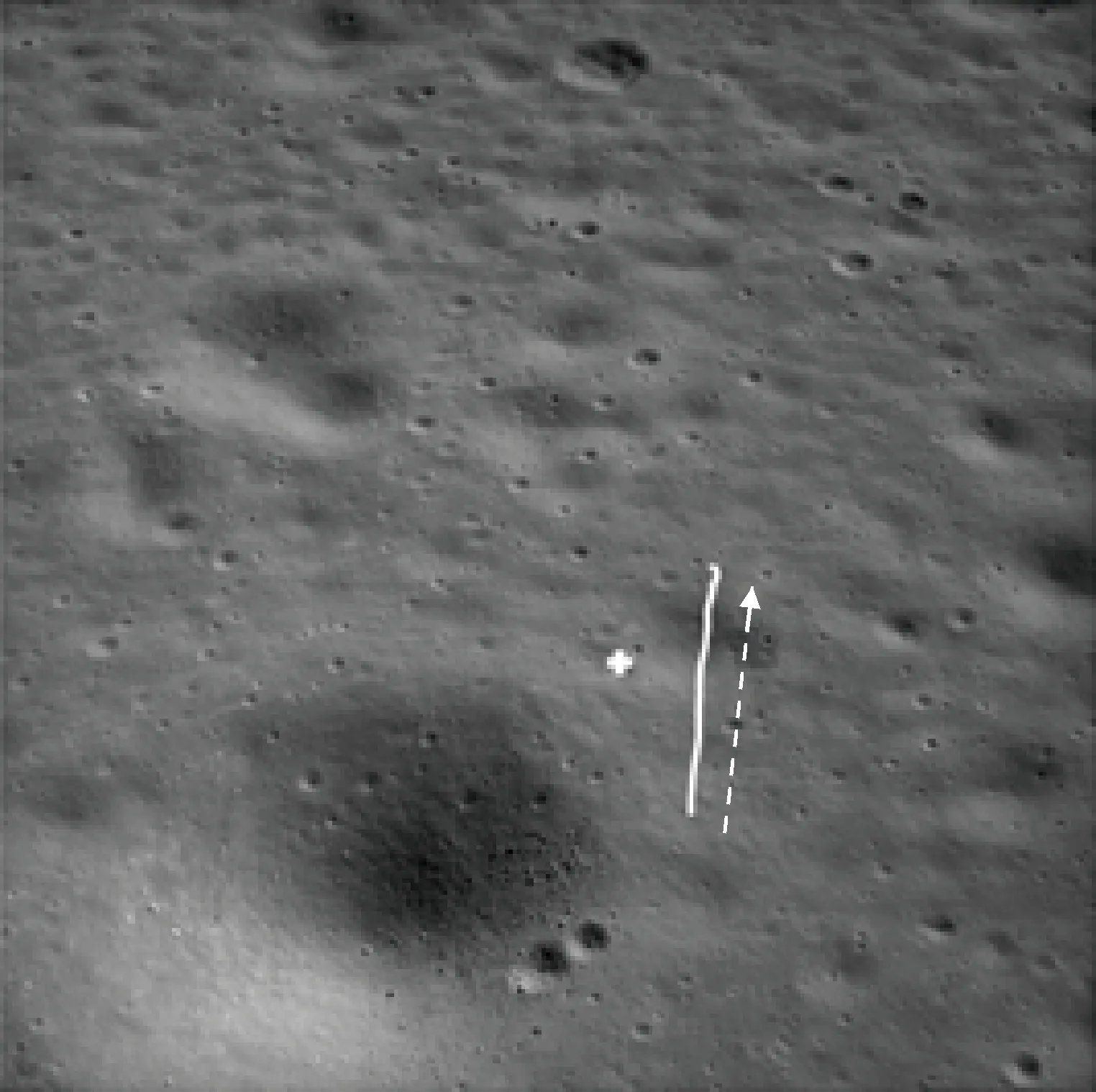
图5 粗避障成像结果及飞行轨迹Fig.5 Coarse hazard avoidance imaging results and flight trajectory
2.1 光学粗避障
对图像进行阈值分割,标注由于过大的起伏引起图像过亮、过暗的区域;剔除图像中连通域过小的障碍区,并对障碍区进行形态学上的膨胀处理,得到最终障碍标记的二值图,如图6所示。

图6 障碍标记结果Fig.6 Hazards marking results
求取每个障碍区域质心,以质心为顶点生成Delaunay三角形,初始着陆候选点为各三角形的外接圆圆心,如图7中小圆圈标识。
在一定区域内的外接圆圆心中选择最终的着陆安全点,最终结果如方框中十字所示。
经过光学粗避障,着陆区内障碍占比为0.44%,整图的障碍占比为5.37%,相比于标称落点,最终安全区的安全概率评价值提高了45%。由此可知经过避障处理之后,着陆区的障碍比例显著减少,进一步证明光学粗避障合理有效。
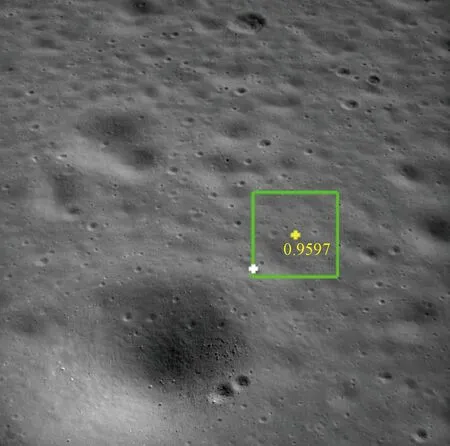
图8 最终着陆区示意Fig.8 Final landing area

表1 粗避障结果统计Table1 Coarse hazard avoidance results
2.2 激光精避障
经过对三维点云数据的解算,精避障安全点位置如图中方框中十字所示。
如图9所示,经过激光精避障,着陆点避开了四个显著陨坑,选择了距离陨坑较远且靠近图像中心的位置作为着陆点。精避障安全点在激光坐标系内的三维坐标为(-6.04, 1.68, 98.99),图10中陨石坑的位置及深度、直径等信息见表2:
图10 陨石坑标记Fig.10 Craters marking
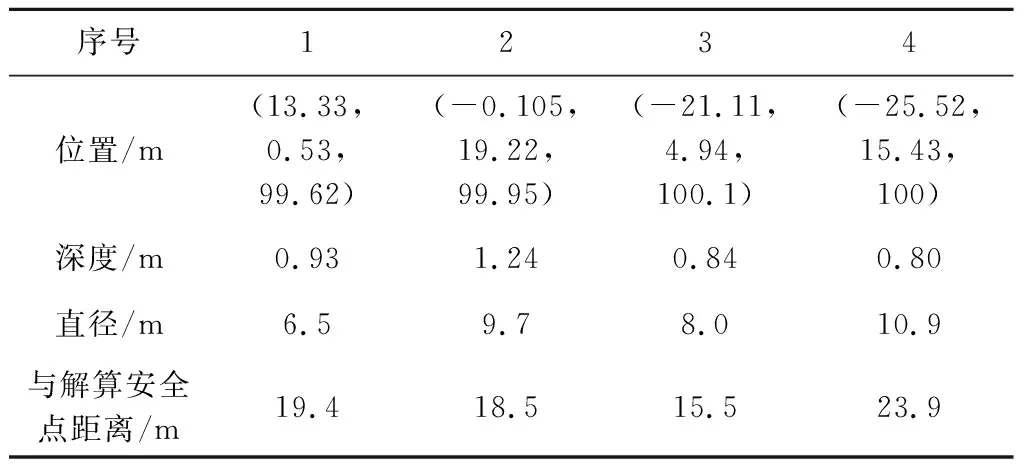
表2 精避障视场内陨坑分布情况Table 2 Craters distribution in Lidar FOV
最终激光精避障的情况如表3所示。

表3 精避障情况统计Table 3 Statistics of precise hazard avoidance results
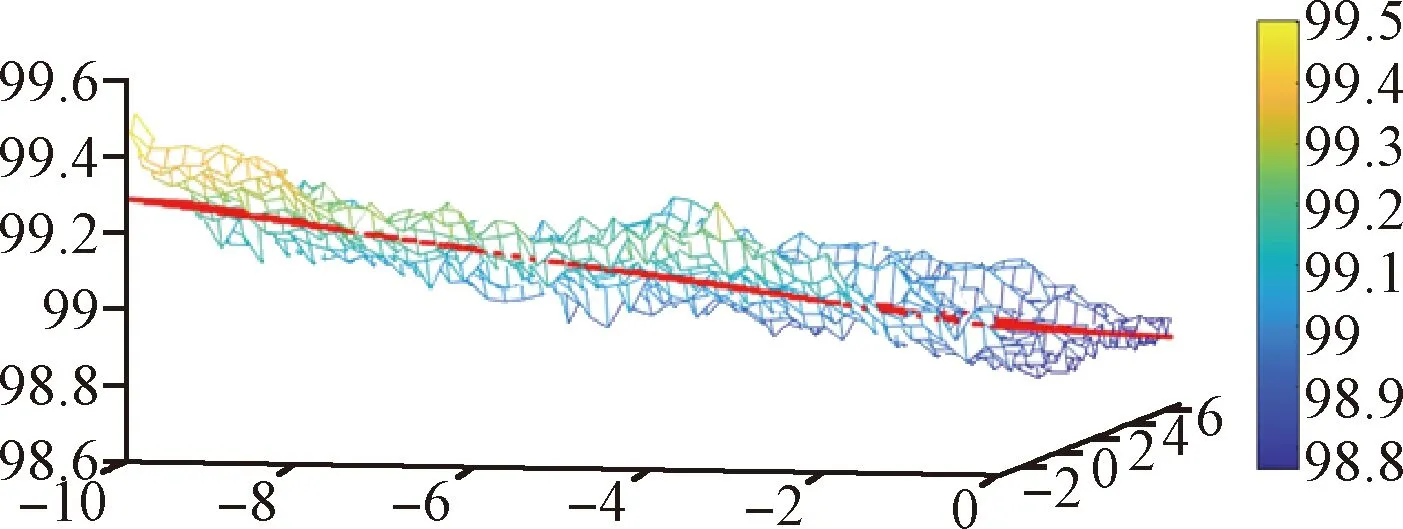
图11 着陆点局部及坡度拟合示意图(中间为拟合平面)Fig.11 Schematic diagram of the local and slope fitting of the landing point
最终两级避障安全点位置间隔约为6.7 m,落点位置与精避障安全点间隔小于1 m。精避障安全区和光学图像粗避障安全区之间的对比如图12所示。
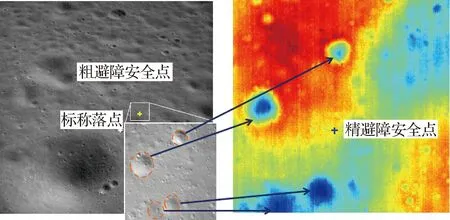
图12 两级避障结果对比Fig.12 Comparison of two-phase hazard avoidance results
由上述分析可知,两级避障均合理有效。
3 结 论
嫦娥五号着陆月面是中国自主着陆避障系统第三次在轨应用,包括光学粗避障和激光三维精避障,对嫦娥五号在轨着陆避障结果进行了分析。利用两级避障时分别获得的图像数据,计算安全区的位置及安全评价系数,并对两级避障进行相关性分析。结果证明嫦娥五号的光学粗避障避开了大型障碍、选择了图像中合适的着陆区;后续的激光三维精避障在粗避障的基础上有效地避开落点附近的四个小型陨坑,两级避障均合理有效,保障了嫦娥五号最终成功落月。
