基于ICP算法的无人方程式赛车路径规划
2021-10-16邱子威张友兵毕栋
邱子威,张友兵,毕栋
(湖北汽车工业学院 汽车工程师学院,湖北 十堰442002)
无人驾驶方程式大赛要求赛车具有良好的定位、感知、规划及控制能力,路径规划起关键作用。目前路径规划算法分为全局路径规划和局部路径规划。全局路径规划算法包括A*算法[1]、遗传算法[2]、蚁群算法[3]等,局部路径规划算法包括人工势场法[4]、智能水滴算法[5]、神经网络算法[6]等。迭代最近点(iterative closest point,ICP)算法应用广泛,但对2个点云初始位置要求较高,且要求2个待配准点云存在包含关系[7]。鉴于此,国内外学者提出了基于正交因子模型等改进ICP算法。路径规划方法的选择与行驶场景有关,无人方程式赛车传感器识别锥桶为坐标点集,传统ICP算法对点集坐标路径规划略有不足,通过狭窄通道时无法找到可行路径易陷入局部极小点。改进ICP算法不必对处理的点集进行分割和特征提取,收敛性较好,且计算量小很多。文中基于ICP提出适合无人方程式赛车的路径规划算法,根据已知赛道信息和当前信息规划出赛车可行驶的全局路径。
1 赛道分析
以8字环绕项目为例,提出路径规划方法。赛道由2个同心圆成8字形排列,圆心之间距离为18.25 m,内圆直径为15.25 m,外圆直径为21.25 m。在内圈内侧和外圈外侧布置16个交通锥标,两圆切点处使用高锥桶作为切点处的标识,赛道内外圈之间是3m的赛道,赛车出入于两圆相切的3m宽赛道,如图1所示。ICP算法即给定有部分重叠的参考点集和当前点集,根据2组点集中点的对应关系,求点集之间的变换关系[8],如图2所示。8字环绕赛道点云数据重叠率较高,采用ICP算法可快速计算出可行驶轨迹,系统复杂度低。
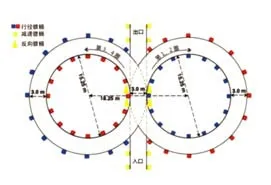
图1 赛道示意图
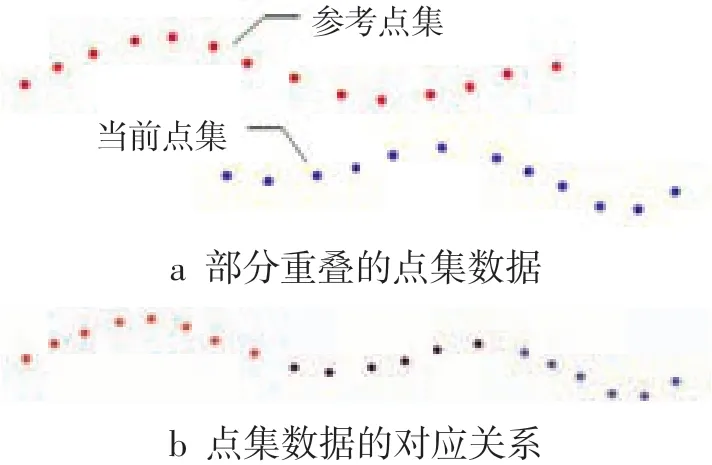
图2 信息点集数据
2 点集变换参数求解
在同一坐标系下,将某个当前点集B变换到参考点集A,假设需要点集在x方向平移Δx,y方向平移Δy,点集整体旋转Δφ。旋转矩阵R为

平移向量T为

则参考点集A与当前点集B变换关系为

算法流程如图3所示。
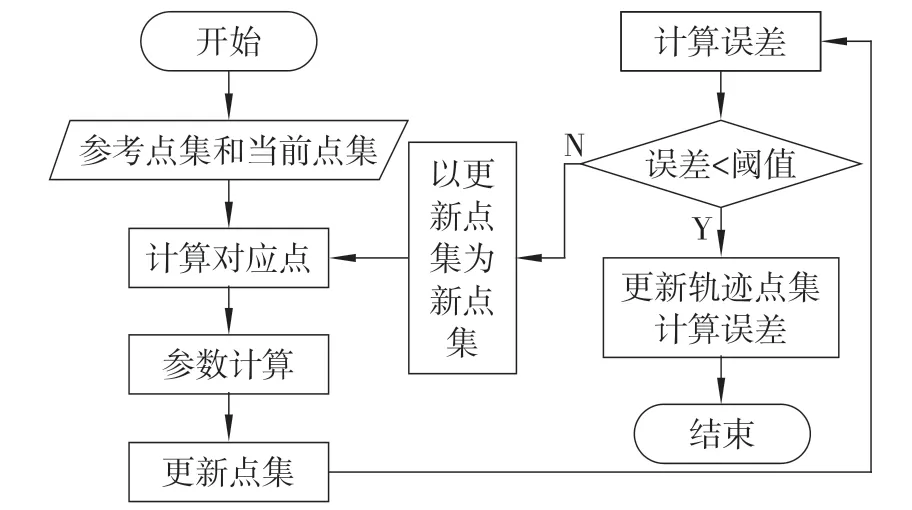
图3 ICP算法流程图
给定A和B,以8字环绕左侧入口第1个坐标点为原点,寻找公共重合部分点集{ai}和{bi},进行中心位置配准,求出{ai}和{bi}的中心点Ca和Cb:

设置对应点距离和函数为

新目标函数为
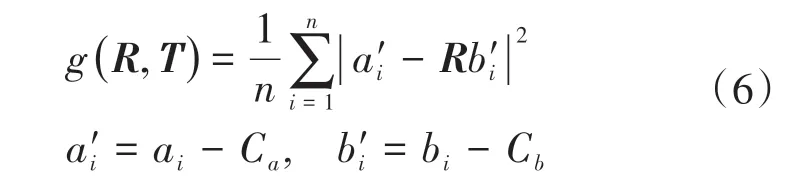
可以看出式(6)中已经将平移向量T滤除,需要求解的未知量只有R。将式(1)代入式(6)得:式中:、分别为a'i在x、y方向的分量;分别为的x、y的分量;'、分别为{ai}、{bi}(i=1,2,…,n)中每个点到点集中心的差值;Δφ为2组点集间的旋转角度。、、和为定值,不会随R的变化而改变,要使目标函数g(R,T)的值最小,只要让式(8)取最大即可。
两边对Δφ求导可得:
通过Δφ可求得R,{ai}和{bi}的T由式(10)求得:


将最新变换出的矩阵C与目标点云进行计算,损失函数为对应点距离平均和:

当迭代得到的损失值大于设定的最小阈值即L大于Lmin时,则以更新的点集C为新点集,重复进行迭代计算。反之将R和T代入轨迹点集:

式中:P'为更新后的轨迹点集;Q为标准正确轨迹点集;σ为轨迹均方根误差。
3 仿真验证
以赛道入口2个高锥桶中点为原点,得到8字环绕全部锥桶坐标点集,将该点集作为参考点集。无人方程式赛车传感器有效识别最远为20m,有效识别最大角度为92°,根据原点坐标得到当前可识别锥桶。参考轨迹点集选取8字环绕项目赛道中间位置,如图4所示。
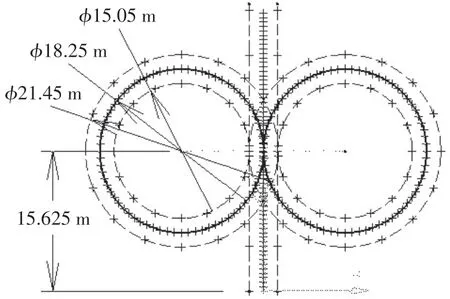
图4 赛道参考点集
将参考点集、参考轨迹点集和当前点集导入MATLAB仿真环境中,根据所有坐标点集与左侧入口第1个坐标点距离得到参考点集与当前点集重合部分,将重合部分进行ICP迭代计算得到旋转矩阵和平移向量,最后将其代入参考轨迹点集,输出当前轨迹点集结束计算。图5为模拟的8字环绕赛道,当前点集与目标点集有一定的角度和位移偏差,该赛道能较好地验证算法的有效性。由图6可知,该算法能较好地规划出行驶路径,保证赛车行驶路径基本处于赛道中间位置,3次测试的轨迹均方根误差分别为0.1251 m、0.1423 m、0.1361 m,平均值为0.1345 m,误差较小,而且路径连续光滑,符合汽车运动学规律。
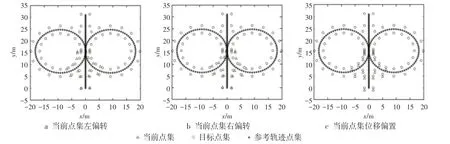
图5 赛道模拟
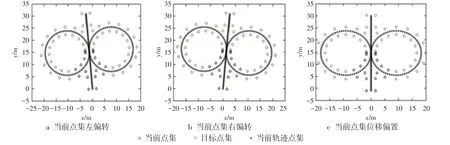
图6 路径规划效果图
4 结论
以8字环绕赛道为例,提出了适合无人方程式赛车的路径规划方法。在赛道信息已知条件下,该方法可规划出连续光滑,基本处于赛道中间的可行驶轨迹,使赛车可以安全可靠地通过赛道,该方法可拓展应用到直线加速项目中。在较好的初值情况下,可得到较好的算法收敛性,但实际应用中可能会出现较小的角度偏差,导致在远端位置赛车碰到锥桶,后续将继续研究。
