基于立体匹配技术的X射线分层成像方法研究
2021-10-13田婷,陈平,刘宾
田 婷,陈 平,刘 宾
(中北大学信息探测与处理山西省重点实验室,山西 太原 030051)
0 引言
X射线成像具有穿透物体并能看到物体内部结构,成像分辨率高等优点,已广泛应用于机场、车站等安检行业[1]。但由于其透视图像是二维的,无法区分不同层次的结构信息,也不能对各物体进行定位,会存在极大的安全隐患[2],因此,对如何进一步提高各个深度层目标物的结构信息已经成为了研究的必要问题。
目前,用于安检的三维成像技术有计算机断层成像(CT)技术和计算机层析成像(CL)技术。传统的CT技术需要对目标物进行全方位扫描和重建[3-4],因此需要较大的计算量和成像时间,极大地限制了其在工业在线检测等领域的应用。针对该问题,有研究者对欠采样数据的算法进行了研究,Jiang、Liu、Cai等[5-7]提出了一系列正则化的重建算法,这些算法虽然可以降低成像时间,但是对于板状物体进行扫描时,成像质量较差。金鑫等[8]提出双能静态CT系统,虽然得到较为高分辨率的图像,但是该技术探测器结构复杂,成本较高,因此推广使用较为不便。CL技术虽然可以解决板状结构成像差等问题,但是射线源和探测物1次相反运动只能获得1个深度的结构,想要获得不同深度信息需要物体多次相对运动,增加了成像时间。当被检测物存在遮挡时,CT和CL技术都无法实现被检测物体不同层的快速成像,都不利于X射线安检等简单场合的实时检测。而对于简单场合的快速成像安检系统,不需要高精度、全方位的三维成像,只需消除二维图像中多层物体的盲点,可以快速、高效地对各层物体进行有效区分,准确识别即可。
针对上述问题,本文结合双目立体视觉技术和视差原理[9-12],提出了一种可以实时获取三维信息的X射线图像分层技术,其仅通过2个视角的投影图获得物体不同深度的结构信息,快速有效地实现了对物体的不同层准确识别。与CT技术相比,虽然该方法得到的三维信息是不完全或近似的,但是其不需要对物体进行多角度扫描,在一定程度上提高了物体识别准确率,成像时间短,对于快速安检具有重要的参考意义。
1 成像原理
人们的视觉效果本质上是三维的,在看同一物体时,由于瞳距会造成两眼所看到的图像是不同的,经过大脑的融合,就会对各物体产生了立体感,可以看到现实场景中不同深度的物体,这就是双目立体视觉的基本原理,即通过2张略有差异的二维图像得到三维图像。基于此技术,该成像系统参考单能X射线技术,由辐射源和探测器阵列组成,不同之处在于,单视点成像基于1组探测器阵列获得投影图像,而双视角则需要用2组探测器阵列,通过物体移动获得2个不同角度的投影图像。
2 成像方法
立体成像一般包括5个过程:图像采集、探测器标定、特征提取、立体匹配和三维重建。由于射线图像可以看到被检测物体的各个深度信息,其灰度值是不同深度层物体叠加的,而可见光图像只是遮挡关系,其灰度值只是表面信息,因此射线图像特征提取和匹配成了研究的重点和难点,本文对其进行深入研究,通过对各环节问题的解决获得了高精度的图像分层成像。
2.1 二维投影图像的产生
射线源发射出的X射线通过双缝准直器,产生具有一定夹角的2条扇束形射线,物体通过传送带运送,依次在左右探测器成像,获得2个不同角度的透视图,图像的成像系统如图1所示。

图1 成像系统
2.2 基于改进类间方差的特征提取
特征提取是为了找到图像的匹配点,不同的匹配方法选取的特征是不同的。通常图像的特征选取分为点特征、区域特征和轮廓特征。本文根据射线成像特征,选取图像的区域特征,对图像进行块匹配。区域特征选取采用改进最大类间方差法(Ostu法),该方法通过对阈值范围进行确定,解决了极值不唯一时最佳阈值会因初始条件变化而变化等问题,具体实现过程如下所述。
根据图像的灰度值,选取一个初始阈值,初步将图像分为2部分,其具体公式为
(1)
m和n分别为图像的行数和列数;N为总像素数;f(x,y)为各点的灰度值。
用阈值T0将图像分为背景M1和目标M22部分,M1中的像素灰度值在[0,T0]之间,M2中的像素灰度值在[T0+1,S-1]之间。背景与目标的概率和均值分别为:
(2)
(3)
(4)
(5)
w0和w1分别为M1和M2的概率;u0和u1分别为M1和M2均值。可根据均值和概率计算类方差,其公式为
(6)

用上述方法,先对最外层的图像与背景区域直接相邻的区域,选取一个最佳的阈值将图像分为2部分,将最外层的图像变为与背景相同的灰度值从原图上剥去,再对次外层的图像重新选取合适的阈值,对投影图不断重复上述过程,将阈值进行迭代更新,直到所有的图像都分割完。将第1次的分割结果与第2次的分割结果进行相减得到最外层图像的分割结果,以此类推。
分割后的图像在重叠的部分会有空缺,先判断空缺部位是否有值再对其采用闭运算进行填充。先对最外层的物体采用逐行进行判断,如果该行空缺部分的值与后分割物体该行的所对应像素和的值小于一个阈值时,则判断该行空缺部分有值,否则为空缺。依次对分割物体进行此操作,其具体公式为
(7)
j、j+n分别为某行中的j列、j+n列;xK1为K次分割中第1次分割的物体的像素值。
执行完上述操作后采用闭运算对分割物体进行填充,并依次对每个分割物体进行该操作。闭运算是一个先膨胀后腐蚀的过程,其具体公式为
M·N=(M⊕N)!N
(8)
M和N分别为分割后的图像和重叠部分的图像;⊕表示膨胀过程;!表示腐蚀过程。
图像的膨胀过程可以用公式表示,采用半径为20像素点的圆盘,扫描投影图中的每个像素,用该圆盘的值与其所覆盖的图像的值进行“或”运算,进而得到膨胀的图像L,其公式为
L=M⊕N={x,y|(N)xy∩M≠∅}
(9)
x,y为图像对象灰度值;L表示膨胀操作得到的图像。
图像的腐蚀过程可以用公式表示,在得到扩大的图像后,用预设的圆盘继续扫描扩大图像中的每个像素,然后用该结构与覆盖图像的值进行“与”运算,腐蚀可以缩小目标区域并消除无意义的区域,其公式为
L!N={x,y|(N)xy⊆L}
(10)
通过闭运算得到的图像,可以将相邻图像的缝隙部分连接起来,填充了空洞,也可以丰富图像的边界,很好地弥补了重叠部分的空缺现象,保持与分割图像形态基本相同。
2.3 基于属性相似的立体匹配
立体匹配是立体成像中关键的一步,是为了根据2个不同图之间的关系来计算视差。对于上述分割好的图像,建立1个图像的属性集,具体公式为
Ek={EA,EB,EC}
(11)
EA,EB,EC分别为分割图像的面积、边缘的长度和重心坐标。
左投影图的属性集为{Ei,k},右投影图的属性集为{Ej,k},其中i为左投影图中分割物体序号,j为右投影图中分割物体对应序号,这样就可以通过下式进行计算
(12)
通过对分割后图像的属性集中各个属性进行比较,设置合适的阈值T,当Pi,j最小且Pi,j 由于物体是平行移动,图像的纵坐标相同,根据左、右投影图像中各个匹配好的图像,将相应匹配好的2幅图像中的重心横坐标进行相减,就可以得到物体的绝对视差,则相关公式为 (13) ux,uy为重心坐标;r为图像点集。 Dk=uL,x,k-uR,x,k (14) Dk为视差值;uL,x,k、uR,x,k分别为左、右投影图中第k个匹配好的物体的重心横坐标。 通过公式根据已求视差可以还原物体的结构信息,对物体进行分层显示。立体成像几何示意如图2所示。 图2 立体成像几何示意图 图2中,点O为X射线源,射线源到重建物点M所在平面的距离为Z,物点M所在平面到探测器的距离为D,点M的运动距离为B,点M在2幅投影中的坐标为(x1,y1)和(x2,y2)。由于物体在传送带平行移动,其y坐标相同,所以2个角度投影图像中对应的横坐标x1,x2为对应视差(Dk),根据三角形相似原理可以求得物点M(X,Y,Z)与投影坐标之间的关系,则物点M的三维坐标计算公式为: (15) (16) (17) 在求得三维点坐标后,可根据三维点坐标对被检测物体分层成像。 为了验证本文方法的有效性和准确性,使用YXLON FF20 CT系统获取2个不同角度的投影图,射线源到载物台的距离为450 mm,射线源到探测器的距离为780.577 mm,载物台移动的距离48 mm,实验中电压、电流等参数如表1所示。 表1 实验条件 通过表1实验条件获取的2个不同角度的投影数据如图3所示。 图3 不同角度的投影图 对投影图进行分割提取特征,使用传统的最大类间差和本文的方法做对比,左右投影图像的分割结果如图4所示。 图4 分割结果 图4为左右投影图的分割结果,其中,图4a和图4b为传统的Ostu分割结果,图4c和图4d为本文方法的分割结果。从分割结果可以明显看到,本文的方法对物体的分割更准确,分割的精度得到了提高。 用本文方法对物体分割后,对分割后物体左、右投影图空缺部位填充,结果如图5所示。 图5 填充图 图像分层立体显示对比如图6所示。图6a为经过传统分割方法,通过匹配求视差后的图像的立体显示效果,图6b为用本文方法后对图像的立体显示。 图6 图像分层立体显示对比 通过对比图4中的分割结果,发现传统的分割方法会存在目标物体分割不准确的情况,这样就会导致最后显示的分层物体形状有所差异。从图4中可看出本文的分割方法更准确,可以对分层物体进行准确的分辨。 为量化表示重建结果的好坏,根据先验情况已知目标物的分布情况,可绘制各层真值图像,使用结构相似性(structural similarity index measure,SSIM)对目标物的各层重建结果进行定量评价。 (18) μm,σm为各层重建图像的均值和方差;μture,σture为各层物体真值图像均值和方差;σm,ture为2幅图像之间的协方差;c1,c2为常数。其中SSIM的取值范围为[0,1],值越接近1时,说明重建质量越好,2幅图像越相似。实验评价结果如表2所示。 表2 目标物各层重建结果的SSIM评价结果 经过对比传统方法和本文方法对各层重建结果的SSIM,可以看出本文方法提高了目标物各层重建图像质量,对多层目标物的重建得到了很好的展示效果,真实反映了被检测物体各层的形状。 本文针对安检领域中多层物体重叠,无法有效地区分各层物体等问题,提出了一种图像分层成像方法,可以快速地获取图像的三维信息。该方法根据物体的运动获得不同角度下的2个投影图,对投影图依据灰度信息由外向内进行分割匹配,根据匹配好的结果获取视差,生成具有深度信息的透视图像,经实验验证,该方法有效地实现了目标物不同深度层的重建,消除了图像中大部分物体重叠现象。本文的方法在一定程度上反映了被检测物体的形状及本质,相比单视角有很大的优势。2.4 基于重心坐标的视差计算
2.5 图像分层成像

3 实验设计与分析
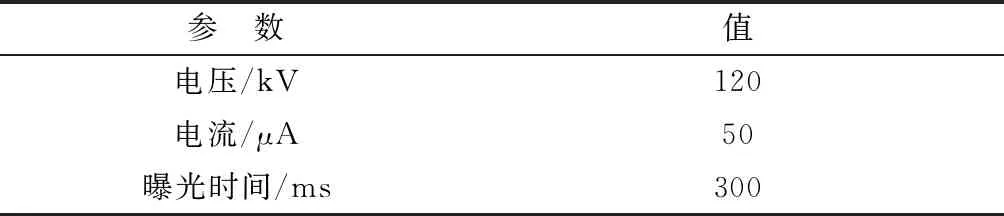





4 结束语