基于时间栅格法和最优搜索的电网巡检机器人避障路径规划方法
2021-10-13张晓晔谢志文
张晓晔,谢志文,吴 晖
(1.广东电网公司电力科学研究院,广东 广州510030;2.南方电网电力科技股份有限公司,广东 广州510030;3.武汉大学,湖北 武汉430072)
0 引言
电力系统数据量日益增多,极大地增加了电能的输送任务,传统的人工电网巡检面临着更大的危险[1-2]。采取机器人代替人工进行电网巡检,不仅可以保障工作人员的健康,而且可以提高巡检效率,创造更高价值的经济效益[3-4]。巡检机器人必须进行路径规划,即在有障碍物的未知环境下,规划一条能够避开所有障碍物的最佳运行路径,这具有十分重要的意义[5-6]。
任彦等[7]通过对势场蚁群法进行改进,以改进的算法为基础研究避障路径规划方法,主要在虚拟牵引力中引入蚁群算法,利用势场合力进行蚂蚁路径搜索,防止受到误导信息影响陷入局部最优问题,具备较强的全局搜索性能。江超等[8]以未知环境为基础,展开移动机器人面对静态和动态障碍物的避障方法研究,对障碍物利用k-mean聚类进行聚类获取障碍物位置信息,通过最小二乘法进行障碍物的运动学模型拟合,根据运动方向和速度预测触碰情况,根据机器人大小采用相对坐标实现机器人的成功避障。
虽然上述方法都能有效实现机器人的避障及路径规划,但是存在避障能力低下和路径规划不合理的问题。而时间栅格法是一种可以有效标识动态障碍物,并建立空间动态环境信息的一种方法;最优搜索算法可在全局范围内搜索到最佳目标点。基于上述2种方法特点,本文研究了基于时间栅格法和最优搜索的电网巡检机器人避障路径规划方法,利用时间栅格法构建巡检机器人的避障环境信息,通过最优搜索和人工势场法进行全局和局部的路径规划。
1 基于时间栅格法和最优搜索的电网巡检机器人避障路径规划
1.1 构建环境信息
1.1.1 时间栅格法
电网巡检机器人通常利用传感器获取障碍物的相关信息,但是传感器信息不具有空间属性。因此,需要结合时间栅格法构建工作空间,对比机器人和障碍物的大小,根据对比结果确定时间栅格的数量和尺寸[9],获取相关环境信息。
时间栅格法的栅格值包括3种情况:当栅格值为0时,表示不存在障碍物;当栅格值为设定值时,表示存在静态障碍物;当栅格值为其他值时,表示存在1个或多个动态障碍物[10]。针对动态障碍物运动的速度和方位,机器人可通过传感器进行获取与计算,根据计算结果在工作空间内确定障碍物运动到栅格内某处的时间值,以该时间值进行动态障碍物的标识[11],根据机器人到达标识的栅格时间是否与动态障碍物相同来判断机器人与障碍物能否发生触碰状况。
为了通过最少的栅格对动态障碍物进行标识,将机器人的直径设定大于紧邻的2个障碍物之间的间距。若在某一栅格内同时出现多个障碍物,则需叠加该栅格内的时间,在路径规划过程中,以动态障碍物各自到达重叠处的时间值为依据分离栅格内叠加的时间值[12]。
1.1.2 获取障碍物运动状态
利用CAS算法,根据机器人的运动方向和速度,结合传感器获取的障碍物2个相邻时刻的位置信息,计算障碍物的方向、速度及位置等状态。获取障碍物运动状态,如图1所示。

图1 获取障碍物运动状态示意
由图1可知,在已知机器人运动速度和运行方向条件下,通过传感器可获取动态障碍物在t和t+1时刻时与机器人之间的角度,分别为θold和θmew,与机器人间距为rold和rnew,从全局视角出发,可对动态障碍物的运行速度和运动方向进行计算。
1.2 最优搜索避障路径算法
根据上述时间栅格法构建的工作空间,采用最优搜索算法对机器人进行全局避障路径规划,最优搜索算法为:
a.对紧邻机器人的时间栅格进行搜索,选出自由栅格。
b.以自由栅格中心点(x,y)为起始位置,以目标中心点为终点位置,通过评估函数计算该路径间距,即
(1)
H表示紧邻机器人的时间栅格;g表示目标位置的时间栅格。
c.将获取的各栅格H(G)值进行比较,筛选出最小值的栅格。
d.将机器人移动到最小值栅格内。
e.以目标点为基准,判断机器人是否到达该点。
f.若已到达,则任务完成,或进行后续任务;若未到达,则回到步骤c,重复操作。
1.3 电网巡检机器人避障路径规划设计
在已规划好的巡检路径中,巡检机器人可通过近红外和超声波2种传感器判断其前方、左边和右边3个方位。这2种传感器测距原理是通过设定的安全距离确保传感器有充裕的时间传输信号,根据接收的传感器信号进行障碍物位置的判定[13-14]。为了提升避障精准度,特将障碍物设为矩形,机器人通过传感器获取自身周边障碍物相关信息,保证运行安全性和避障性,机器人在避障过程中利用计数算法进行运行时间的计算,结合机器人受到的引力和斥力关系判断机器人局部极值点,若发生陷入极值点的情况,则采用人工势场法调整机器人垂直运行方向进行躲避[15]。
a.斥力势函数。
在电网巡检机器人避障过程中,障碍物势场对机器人产生斥力,障碍物(xobst,yobst)和机器人(xrobot,yrobot)之间的间距与斥力势能成反比,故斥力势函数为
(2)
r为间距;rmax为势场范围最大值;k1为加权系数。
机器人承受的斥力计算公式为
Fr=-gradEr
(3)
机器人承受斥力的角度公式为
(4)
当r越小时,则Fr越大,为了避免发生相撞,设定r0为安全距离,当r越趋近于r0时,保证Fr为允许最大值即可。
优化Fr使其能够连续,优化公式为
(5)
机器人本身大小、其运行速度以及空间内障碍物的密度决定了r0和rmax的值。
b.引力势函数。
根据定位目标点进行巡检机器人的路径规划,机器人与目标点之间会生成一种引力,该引力势能与机器人和目标点之间的间距成正比,引力势函数公式为
Eg=k2r
(6)
机器人承受的引力公式为
Fg=k2
(7)
角度公式为
(8)
c.计算合力。
合力为斥力和引力的叠加矢量,巡检机器人运动方向取值于合力方向。在x方向和y方向进行斥力和引力的分解,分别计算斥力和引力在2个方向上各自的分力,即Fr,x、Fr,y和Fg,x、Fg,y,通过各分力计算合力,即
(9)
合力方向为
(10)
为了提升电网巡检机器人避障精度,增设定位模块定位目标,机器人根据已设定目标进行动态路径规划,精简巡检路径,提升巡检效率,实现在任何环境中的定位导航功能。
2 试验结果与分析
设12 m×12 m的区域为仿真环境,其中不均匀地分布着20个长方形障碍物,巡检机器人起始位置和目标点位置坐标分别为[0,0]和[11,11],机器人步长为0.50。根据已规划的路径轨迹进行12次重复避障试验,避障结果如图2所示。
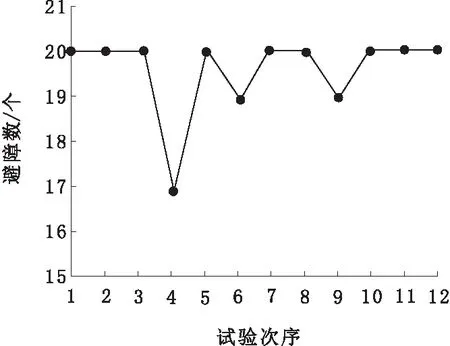
图2 机器人避障数量统计
由图2可知,巡检机器人在既定路径中避障试验过程中,其中9次避障准确率达到100%,平均避障率为97.92%,证明本文方法具有较好的避障效果。
采用人工势场法的目的是避免机器人陷入极值点,若机器人发生陷入极值点的情况会导致其无法规划出成功到达目标点的行动轨迹,巡检机器人解决陷入极值点示意如图3所示。

图3 巡检机器人解决陷入极值点示意图
由图3a可知,机器人在巡检过程中发生了陷入极值点的情况,导致机器人最终没有正确到达目的点,通过人工势场法干预后,如图3b所示,机器人成功避开陷阱,顺利到达设定目的点,这表明该方法能够有效解决路径规划中存在的局限性问题并成功规划最佳的有效路径。
在工作空间内布置1个动态障碍物,假设巡检机器人为匀速运动,当动态障碍物与机器人即将发生触碰时,机器人利用最优搜索避开障碍物,其中,虚线代表机器人及其路径,实线代表动态障碍物及其路径,试验结果如图4所示。
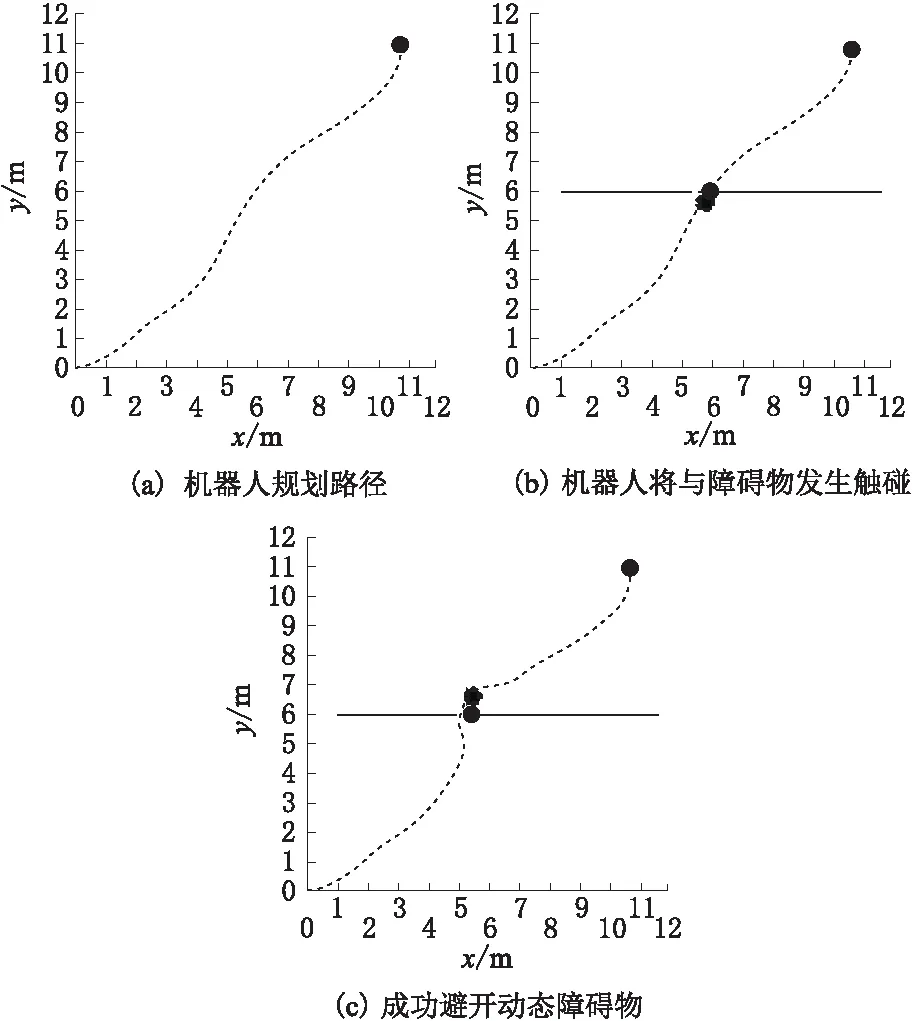
图4 巡检机器人避开动态障碍物示意
由图4可知,巡检机器人在面对动态障碍物的情况下,根据障碍物的运动方向和速度能够采取有效的躲避措施,成功实现避障目的。
采用本文方法分别与文献[7]方法和文献[8]方法进行避障有效性的对比试验,在相同工作空间和障碍物个数的情况下,分别进行了静态障碍物和动态障碍物的躲避试验,试验结果如图5所示。

图5 避障对比试验结果
由图5a可知,在面对静态障碍物时,本文方法避障效果优于文献[7]方法和文献[8]方法,在初始2个障碍物的情况下,3种方法的避障成功率几乎相同,都能达到99.90%以上。但是随着障碍物数量的增多,3种方法的避障成功率均呈下降趋势,本文方法静态障碍物平均避障成功率为98.37%,比文献[7]方法和文献[8]方法对比方法分别高8.37%和3.49%。由图5b可知,在面对动态障碍物时,3种对比方法的避障成功率随着障碍物数量增加差距逐渐拉大,随着动态障碍物的增加,均表现出波动较大的变化,本文方法动态障碍物平均避障成功率为96.12%,比文献[7]方法和文献[8]方法对比方法分别高15.03%和9.10%。结果表明,本文方法无论是在面对静态障碍物还是动态障碍物,均具备良好的避障能力。
在所有条件一致的情况下,利用3种方法进行多次巡检机器人避障路径规划试验,其中的8次路径规划耗时数据如表1所示。

表1 机器人避障路径规划耗时统计
由表1可知,本文方法在避障路径规划中耗时最高为1.80 s,最低1.40 s,平均耗时1.56 s,文献[7]方法耗时最高为3.10 s,文献[8]方法耗时最高为2.10 s,平均耗时分别比本文多1.12 s和0.20 s。
3 结束语
本文设计了一个基于时间栅格法和最优搜索的电网巡检机器人避障路径规划方法,利用时间栅格法对动态障碍物进行标识,构建巡检机器人的避障环境信息,结合最优搜索和人工势场法进行避障路径规划,该方法是一种结合局部和全局的避障算法,在进行全局路径规划过程中,可同时进行局部躲避障碍物的路径规划。基于时间栅格法和最优搜索的避障方法,一方面能够有效避免规划中算法时间和精度产生冲突,另一方面通过调整斥力势函数、引力势函数及合力的计算,提升巡检机器人适应环境的能力,继而提升机器人的避障能力和巡检效率。