基于GNSS的综合观测浮标系统初步设计
2021-10-13何志强王文浩郭冉
何志强 王文浩 郭冉
(第七一五研究所,杭州,310023)
全球导航卫星系统(Global Navigation Satellite System,GNSS)是泛指所有的卫星导航系统,包括全球的和区域的系统,如美国的 GPS、俄罗斯的Glonass、欧洲的Galileo、中国的北斗卫星导航系统,以及相关的增强系统,如美国的广域增强系统(WAAS)、欧洲的地球静止导航重叠服务(EGNOS)和日本的多功能运输卫星增强系统(MSAS)等,还涵盖在建和以后要建设的其他卫星导航系统。基于GNSS的综合观测浮标系统是以浮标为载体,在浮标上集成GNSS模块,利用GNSS卫星获取高精度位置信息,再通过相应的算法来获得水位、潮汐、波浪等参数,同时可根据需要加载测流仪、水温度、电导率、盐度、风速、风向、大气压、气温、相对湿度等传感器。
1 系统概述
GNSS浮标系统采用锚定式浮标的方式对海洋表层温盐参数、剖面流速流向参数和波浪潮位参数进行监测。其中,表层温盐参数、剖面流速流向参数分别通过温盐传感器和声学多普勒海流剖面仪(ADCP)进行监测,波浪和潮位参数通过高精度GNSS定位设备记录的运动姿态反演和修正进行监测。
GNSS浮标系统由浮标体及锚系、安防系统、数据采集传输系统、供电系统、传感器系统、GNSS定位系统和岸站数据处理系统组成。浮标体及锚系、安全防护系统提供监测设备搭载平台,供电系统为监测设备提供电力支撑,由数据采集传输系统对传感器设备的监测要素进行采集并发送至岸站接收系统进行显示和分析。GNSS浮标系统原理框图如图1所示。
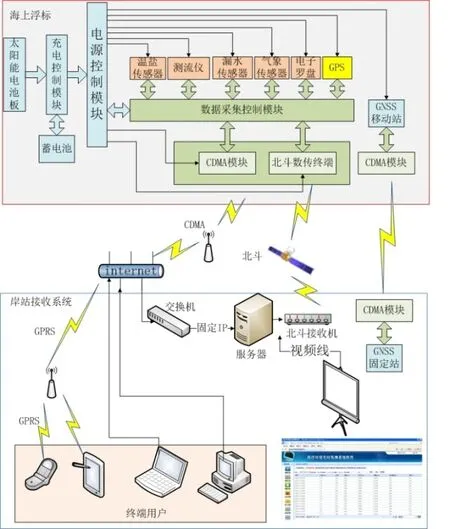
图1 GNSS浮标系统框图
本系统具有以下特点:相比传统波浪测量浮标,成本大大较低;相比传统潮位站,站点设置灵活、成本低;系统采用4G通信网络作为GNSS移动站和固定站通信网络,与卫星转输相比,时效性较高,有利于提高测量精度。
2 主要技术指标
(1)利用GNSS模块测量浮标的垂直运动和水平运动状态,进行波浪谱反演,再计算波浪的特征值数据,精度优于15%或相关性系数>0.96。
(2)利用 GNSS接收机与北斗地基增强系统测量浮标的实时高程数据,通过潮位修正获取实时潮位数据,实测潮位与天文潮潮位误差优于10 cm或相关性系数>0.96。
(3)GNSS浮标系统在以下工作环境中使用:工作水深,2~200 m; 风速,0~50 m/s;波高,0~20 m;表层流速,0~3.5 m/s; 环境温度,-20~60 ℃; 相对湿度, 0%~100%。
3 分系统设计
3.1 浮标体及锚系
3.1.1 浮标体
浮标体主要由浮体、标架、电池舱、电子舱和底座组成。电池舱集成安装在浮体中心,电子舱集成安装在标架内。浮标外观如图2。

图2 浮标外观图
浮标体主要技术规格:(1)浮体直径2.0 m,型深1.2 m(含底座),设计干舷0.3 m,静止状态吃水0.9 m(含底座);(2)浮标设计排水量1.12 t,自重1.12 t,储备浮力约0.92 t;(3)浮标自摇周期≤3 s;(4)浮标体为黄色;(5)4个水下传感器围井。
3.1.2 浮体
浮体为圆盘形结构,主要由聚脲外壳、泡沫注心、螺杆、螺母、压板、防滑垫等组成,为浮标提供浮力和稳性,搭载水下传感器(温盐传感器、ADCP)、标架、电池舱等。
浮体内部为高分子泡沫注心,选用超低吸水率、耐腐蚀的弹性泡沫材料,外表面喷涂聚脲弹性材料,使浮体具有良好的抗挤压和抗撞击能力,强度高、结构可靠,有高浮力/重量比,便于安装及维护,寿命不小于 15年。浮标体材料本体着色,浮体表面是聚脲弹性材料层,整个浮标外表面层耐海水及大气腐蚀、耐高温、耐日光照射,颜色保留持久,光泽度高。浮体强度高、结构可靠、重量轻,便于安装、维护、运输、布放。
3.1.3 标架
浮标标架由316L材料的型材和板材焊接而成,表面喷涂黄色防腐蚀漆,具有良好的耐腐蚀性和足够的结构强度。标架的作用是搭载数据传输设备、GPS、太阳能板、电子舱、避雷针、雷达反射器等,各设备安装位置考虑了互相不干涉和维护方便性。标架顶部带有起吊环,用于浮标整体的起吊。标架外形结构和顶部设备安装布置如图3。
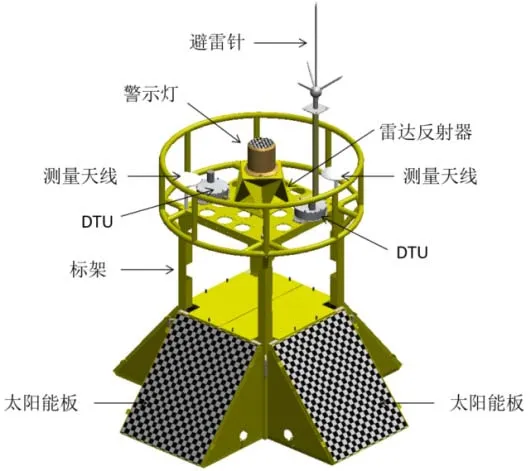
图3 标架外形结构和安装设备图
3.1.4 浮标锚系
采用单点水平悬链式锚系,主要由浮筒、锚链、锚等组成。水平锚系可以减小锚系对浮标随波性的影响,提高测波精度。整个锚链系统稳固可靠,锚系的布放便于浮标的拖曳和维护,且在灾害性天气及恶劣海况时可确保不丢标。
3.2 安防系统
安全防护系统由自动报警系统、防雷装置、航标警示灯等组成,除自动报警系统集成在岸站接收系统上外,其余集成在标架上。
(1)航标灯可视距离>3 km,黄色光,可设置发光周期和莫尔斯码;
(2)雷达反射器和避雷针安装集成在浮标标架上方,起到浮标在位识别和防雷击的作用;
(3)浮标方位超出设定范围、舱进水、监测参数值超出预设值、电池电压过低等状况下,自动报警系统自动向手机和值班电话报警;
(4)浮标传感器支架装有护栏,能够延缓过大的海流对温盐传感器的冲击。
3.3 数据采集传输系统
包括数据采集系统和数据传输系统。数据采集系统由数据采集加密板、存储器及其他元器件和结构件组成。数据传输系统由 DTU无线通信设备和GNSS卫星通信设备组成。
3.3.1 数据采集系统
数据采集系统根据一定的时序控制主机及各类传感器的加断电,采集及处理各类传感器的信号、实时数据存储于固态存储器中,将处理后的数据通过通信传输系统发送到用户的接收站,原始数据保存到存储器中,随时响应检测仪的各类检测应答信号。
数据采集系统具备以下功能:
(1)具有数据采集、处理、存储、质量控制、状态监控、传输、电源控制、故障判断、遥控功能。
(2)单套采集器配置多路数字口(RS-232 、RS-485接口),多路频率计数口,多路 12 位模拟输入通道,多路开关量输出。
(3)设大容量存储卡,可存储 5年以上的所有观测数据。
(4)按规范文件要求定时采集各个传感器的电信号并计算处理成各气象和海洋水文要素观测值,完成数据质量控制。
(5)观测数据通过加密算法形成数据文件可定时自动发送到中心接收站,并同时在系统内存储。
(6)数据文件内容包括观测时间、站位信息、观测数据、设备状态数据和浮标状态数据。
(7)采用模块化设计,可根据选配传感器的不同分别进行参数设置。
(8)具备系统检测功能,可发出各类检测命令,显示检测结果,并对系统的故障进行分析、定位和测试。
(9)浮标时钟采用北京时,可根据用户需要采用格林威治时。
(10)系统采集间隔可选择10 min、30 min、1 h、2 h、4 h工作模式,也可根据要求定制。
3.3.2 数据传输系统
GPRS/CDMA通讯模块(Data Transfer Unit,DTU)的主要功能是把浮标上的数据通过无线的方式传送回后台中心。DTU通过串口与数据采集模块连接,数据采集模块将采集的传感器数据进行打包、加密后,通过 DTU发送至岸站接收系统,实现数据实时传输。岸站接收系统可通过 DTU向浮标发送控制命令,控制浮标系统改变工作周期和电源模块通断电等。
数据传输系统具备以下功能:
(1)通讯系统采用 CDMA(或 GPRS)传输方式,可进行双向通讯,CDMA(或 GPRS)传输至固定IP地址服务器。CDMA(或 GPRS)传输方式用于将传感器监测数据和GNSS信息数据传送至岸站接收系统,GNSS传输方式用于岸基固定站和浮标移动站之间实时动态相对定位。
(2)观测数据发送间隔可设为 10 min、30 min、1 h、2 h、4 h工作模式,也可根据用户需求设置传输周期。
(3)数据自动补发功能。为保障数据传输的可靠性,浮标具有数据自动补发功能。如当前点次数据传输失败,则下一点次继续发射。工作数据存储可达5年。数据接收率大于 95%(正常情况下)。
(4)加密传输。CDMA(或 GPRS)采用RC4加密算法加密传输。
3.4 供电系统
供电系统主要由太阳能板、电池组、充电控制器和电源控制模块组成。太阳能板集成安装在标架上,电池组、充电控制器集成安装在电池舱内,电源控制模块集成安装在电子舱内。供电系统采用太阳能电池板和蓄电池组合供电的方式为浮标供电。系统对浮标提供直接输出的25 V电压,并通过供电控制模块提供12 V和5 V电压值。
供电系统配备太阳能充电控制器和电源控制模块,同时为不同用电需求的仪器设备供电。系统具备充放电过压、过流保护和短路保护功能,某一路传感器供电故障不会对其他传感器正常使用造成影响。
3.5 传感器系统
传感器系统主要包括温盐传感器和ADCP。温盐传感器和ADCP通过传感器支架固定安装在浮标浮体的传感器围井中。同时,可根据需要加装其它传感器。
3.6 GNSS定位系统
GNSS浮标系统利用GNSS定位系统进行波浪和潮位测量,GNSS定位系统包括移动站、固定站和通信系统。移动站安装在浮标上,用于测量浮标位置信息,固定站安装在岸上,与移动站配合实时动态相对定位,使移动站的定位精度达到厘米级。GNSS定位系统通信流程图如图4所示。
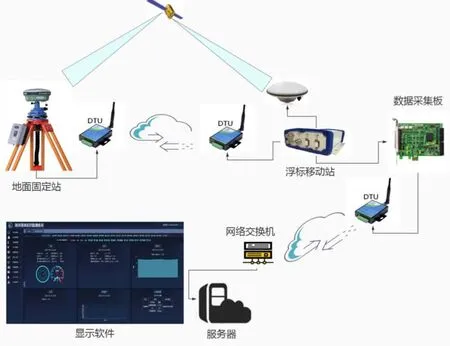
图4 GNSS定位系统数据流程图
3.6.1 移动站
移动站采用北斗高精度导航定位模块,能输出高精度的定位信息,通过 CDMA模块与固定站通讯。接收机采用双天线,可以测量航向。
3.6.2 固定站
采用北斗高精度板卡,支持全系统多频点RTK 定位和定向,可作为移动站或基站使用。其主要技术参数为:RTK平面10 mm,高程15 mm;数据更新率,20 Hz;时间精度为20 ns;速度精度,0.03 m/s。板卡与DTU连接,通过DTU与移动站进行实时通讯。
3.6.3 波浪测量算法
波浪测量是利用GNSS系统定位测量并记录浮标的运动姿态,包括水平运动姿态和垂直运动姿态,根据姿态数据反演出波浪谱,系统对波浪谱数据进行分析计算,得出波浪特征值数据,包括波高、波周期、波向等[1-2]。
由GNSS信号计算,垂向速度信号的自相关函数为
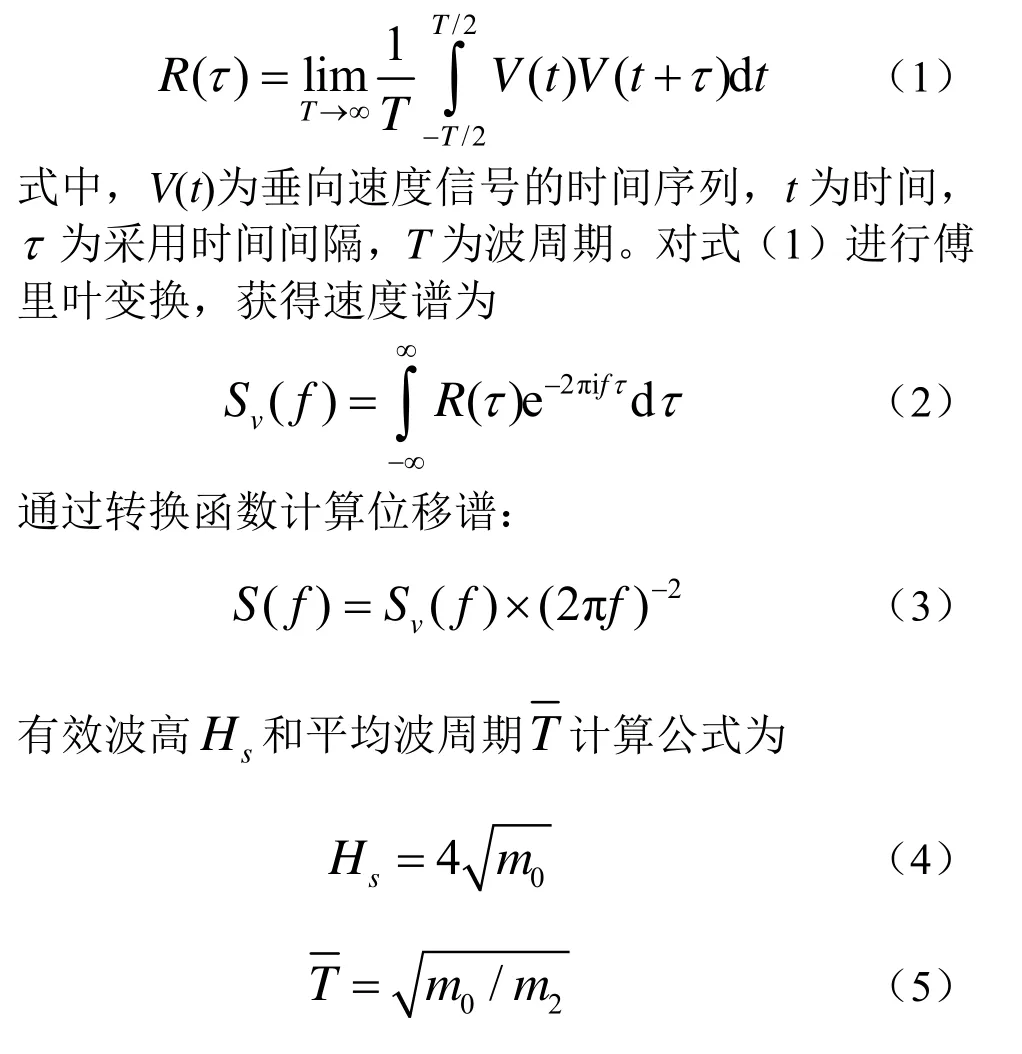
式中,m0和m2为位移谱S(f)的零阶矩和二阶矩,根据海洋波浪频段截取频率范围。
由GNSS浮标观测波面的垂直、东西及南北方向的速度数据的交叉谱可以求得方向波谱。首先定义互相关函数:

当已知方向波谱S( f,)θ和一维波谱 S( f)后,方向分布函数 D(θ,f) 就可以求得,即可以解得成分波来向。
为验证波浪数据的准确性,浮标内置了一个波浪传感器,GNSS所得波浪数据与波浪传感器数据进行对比验证。岸站接收系统接收到数据后,先对数据进行预处理,处理方法为:
(1)将高度信息进行去中心化处理得到波面位移序列X1;
(2)将X1经过高通滤波滤掉潮汐分量,保留波浪信息X2;
(3)对X2进行野点剔除:
● 对X3进行平滑平均处理得到X4;
● 求X4的自相关函数X5;
● 寻找自相关函数X5中心区域极大值,根据极大值位置差估算周期均值T;
● 求X5的频谱X6;
● 对X6积分求波面位移序列功率谱的零阶矩m0。
3.6.4 潮位测量算法
潮位测量则是采用GNSS移动站与岸基固定站测得浮标的高程值,根据所在海域的基准潮位值(85高程)对所测得高程进行校准,得出浮标所在海域的潮位值[3]。潮位测量原理如图5所示。
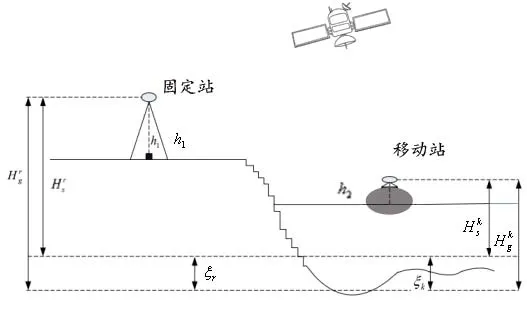
图5 GNSS潮位测量原理

3.7 岸站接收系统
岸站接收处理系统是整个浮标站的重要组成部分,其主要功能是实时、准确、可靠的接收和处理浮标数据,并具有即时报警、数据查询统计及远程控制等功能,给用户研究使用提供方便。岸站接收系统接收到浮标发送的数据后,根据波浪和潮位的测量算法进行数据处理后入库。接收系统界面图见图6。

图6 岸站接收系统界面
4 试验验证
研制的GNSS综合观测浮标系统布放于温州洞头海域进行试验验证,见图 7。将浮标布放在距离验潮站100 m左右海域。高程数据按85高程基准值进行修正后,得到原始潮位数据,与验潮站的潮位数据进行比较,如图8所示。

图7 GNSS浮标
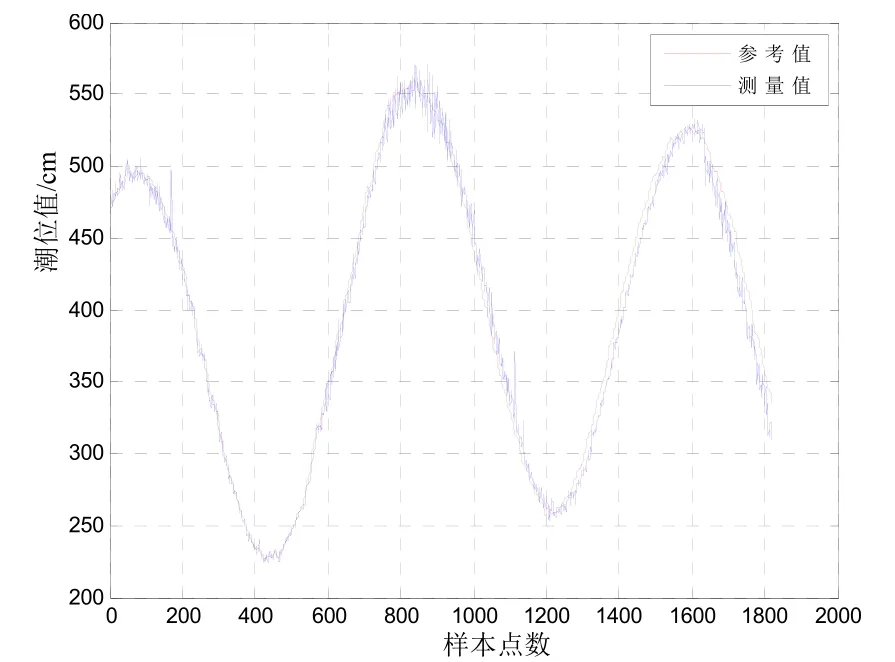
图8 原始潮位数据与验潮站数据对比
将高程数据经过低通滤波器滤掉波浪成分,保留潮位信息Y1;对Y1进行平均平滑。设计FIR数字低通滤波器时,截至频率WC和窗函数长度N是设计的关键参数,可以选择的窗函数类型有矩形窗、三角窗、汉宁窗、海明窗和布莱克曼窗;对原始信号进行小波变化后的高频部分进行阈值处理,得到干净的信号,如图9所示。经过滤波处理后,潮位绝对值误差<6 cm,相关系数r= 0.996 7。

图9 滤波后潮位数据与验潮站数据对比
5 结束语
GNSS浮标可以利用高精度的信息来反演潮位,有效降低潮位要素的观测成本,可以根据需要进行大面积的观测,弥补现在海洋观测水文资料稀缺的不足,为台风、风暴潮、海啸等恶劣天气的海洋监测预警提供便利。在无法建设验潮站的海域,GNSS综合观测浮标是一种有效的可行的替代手段,对于军事活动、远洋航运、海上捕捞、气象、潮位、波浪分析等均具有重要的研究意义和应用前景。
