基于粒子滤波的检测前被动声呐目标跟踪算法研究
2021-10-13刘海嫚杨鑫
刘海嫚 杨鑫
(海鹰企业集团有限责任公司,无锡,214000)
被动声呐依靠目标辐射噪声进行目标追踪,随着水下潜艇等目标的隐身性能越来越好,传感器端接收的信号信噪比逐渐降低,信号往往淹没在海洋噪声和混响中,加大了目标检测的难度。传统的目标跟踪方法多采用“先检测再跟踪(Detect Before Track,DBT)”的方式,即对目标先进行检测,检测到目标后给出目标方位,然后利用方位对目标运动状态进行估计。但在低信噪比的水下环境中,检测率会大大降低, DBT方法受到极大制约。而检测前跟踪(Track Before Detect,TBD)将“检测”和“跟踪”有效结合,不受检测结果的约束,直接处理检测的上一层甚至更原始的数据,避免了数据在处理过程中丢失[1,2]。另一方面,TBD能够联合处理多帧数据,利用相邻时间段内目标运动的连续性降低信噪比的影响,提高跟踪性能。
卡尔曼滤波(Kalman Filter, KF)[3,4]是当前应用十分广泛的跟踪滤波方法。但是该滤波器受到线性系统的制约,在实际工程中很难实施。当然,由卡尔曼滤波改进的扩展卡尔曼滤波(Extended Kalman Filter, EKF)和无痕卡尔曼滤波(Unscented Kalman Filter, UKF)突破了线性系统的制约,但是这些方法都以高斯扰动为前提,不一定符合实际跟踪条件。随着计算机技术的不断发展,另一著名的非线性滤波——粒子滤波(Particle Filter, PF)受到了国内外研究者的高度关注[5]。Merroplis等人在20世纪40年代提出的蒙特卡洛方法[6](Monte Carlo Method,MCM) 是粒子滤波算法的雏形,蒙特卡洛方法在之后被Hammersley[7]等人进行了修改,修改后的算法存在粒子退化问题。针对粒子退化问题,上世纪90年代Gordon[8]等人提出了重采样方法,该方法使得粒子退化问题得到大大改善。近年来,粒子滤波已经应用到信号处理、目标跟踪、医疗技术等诸多领域,与卡尔曼滤波及其扩展的滤波方法相比,粒子滤波不受高斯扰动的限制,应用更加广泛。
基于以上背景,本文将基于粒子滤波的检测前跟踪算法(PF-TBD)应用到被动声呐的目标跟踪中,并与KF和PF进行比较研究,分析在不同信噪比下的跟踪性能,寻找更适用于低信噪比、弱目标的跟踪算法。
1 基本理论
1.1 运动模型

1.2 KF算法
KF是利用传感器量测值对目标的预测值进行修正的过程,主要分为时间更新和观测更新两部分。以下为该算法的递推过程:

1.3 PF算法


经过多次迭代后,大部分粒子的权值会变得很小,失去了粒子多样性,削弱滤波效果。为了减小粒子退化的影响,增加了重采样环节。重采样是指重新选取一组粒子作为后验概率密度估计值的样本,其中权值大的粒子抽中的概率高,权值小的抽中的概率小。
1.4 PF-TBD算法

2 算法仿真及性能分析
本节将在两个方向上比较研究 PF-TBD与 PF及KF在不同信噪比条件下跟踪效果;不同粒子数目下PF-TBD算法的跟踪性能。物理量定义:
跟踪概率=100次仿真测试中能够稳定跟踪的次数/100
2.1 不同信噪比条件下的比较
仿真参数如下:跟踪总时长Ts=60 s,时间间隔T=1 s,粒子数目2000,粒子出生率Pb=0.05,粒子死亡率 Pd=0.05,目标活动范围角度 0~180°,目标初始方位为20°,初始方位变化速度为0.45°,其变化的范围为 0.2~2°,目标的能量初始大小为 0.5,其变化范围为0.2~1,信噪比分别设为3、6、9、12、15、18、21 dB。
从图1中可以发现,当信噪比为21 dB时,三种算法都能对目标进行跟踪。但是从30 s附近的放大图可以发现,PF-TBD算法更接近真实轨迹。随着信噪比的降低,如图1(b)所示的9 dB条件下,在初始阶段,KF算法未能跟踪到目标,直到25 s左右收敛到目标位置,并且在48 s发生较大偏离。PF基本能够跟踪上目标,但在初始20 s内误差略大。PF-TBD算法除了在最初的3 s内没能找到目标,其它时间均能准确跟踪目标,并且误差最低。当信噪比降到1.5 dB时,PF算法和KF算法均不能够跟踪到目标,而PF-TBD算法虽然在初始阶段有所跳跃,但总体完成了目标追踪的任务。通过图1可以发现,随着信噪比的降低,三种算法的跟踪性能都有下降,但是在低信噪比条件下,PF-TBD算法明显优于PF算法和KF算法。这表明PF-TBD在低信噪比下的优越性。

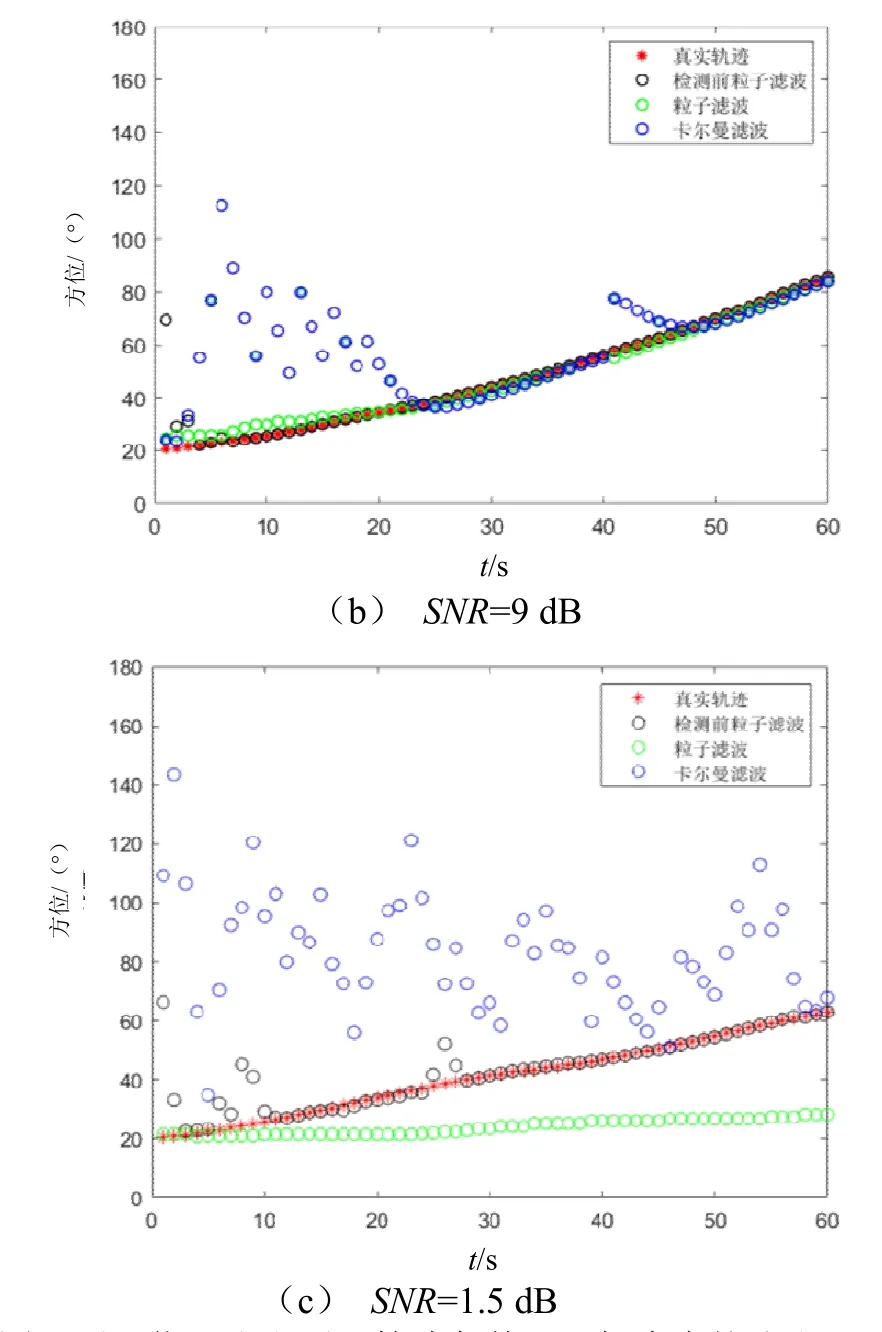
图1 不同信噪比和不同算法条件下目标真实轨迹和三种算法仿真数据的比较
为了进一步验证信噪比对三种算法跟踪性能的影响,针对不同信噪比和不同算法均进行100次仿真,其统计结果如表1所示。
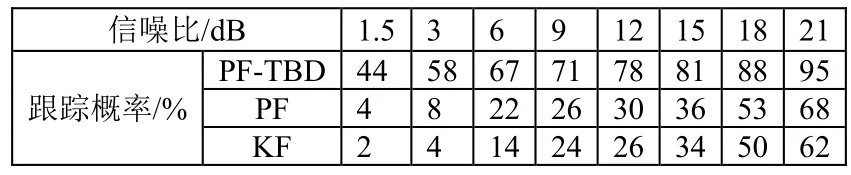
表1 不同信噪比不同算法的跟踪性能比较
分析表1的统计结果可知,随着信噪比的降低,三种算法的稳定跟踪的效率都发生不同程度的降低。当信噪比从21 dB降低到1.5 dB时, PF-TBD算法的跟踪概率由95%降低到44%,PF算法和KF算法分别由68%和62%降低到4%和2%。在信噪比为15 dB条件下,PF-TBD算法的跟踪概率分别是PF和KF的1.39和1.53倍;在信噪比1.5 dB条件下,PF-TBD的跟踪概率分别是PF和KF的11倍和 22倍。由此再次证明,随着信噪比的降低,PF-TBD算法的跟踪性能虽然有所降低,但是却远远优于其它两种算法,即PF-TBD更适用于低信噪比条件下的目标跟踪。
除此之外,本文计算了不同信噪比条件下不同算法的仿真数据和真实轨迹之间误差的方差均值,如表2所示。表中统计了能够稳定跟踪情况下仿真数据和真实轨迹之间的误差方差的均值。同样,随着信噪比的降低,三种算法的误差方差均值逐渐变大,PF-TBD算法由21 dB的0.37增加到1.5 dB的7.6,增大了20倍;PF算法则由0.38增大到10.7,增大了28.15倍;KF由0.42增加到27,共增加了62.3倍。由此可见,相比于其他算法,PF-TBD算法在低信噪比条件下更能稳定跟踪目标。
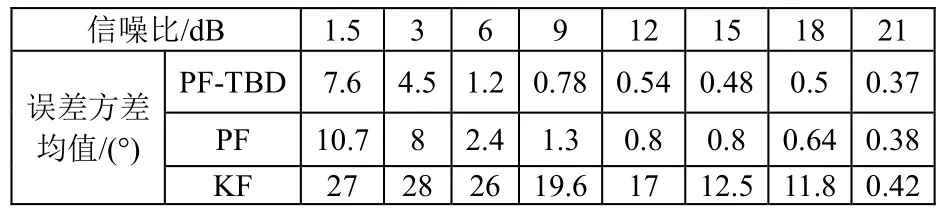
表2 不同信噪比不同算法的误差方差统计
2.2 不同粒子数目对PF-TBD算法的影响
除粒子数目外,仿真条件和上节相同。信噪比为 15 dB,粒子数目分别为 500、1000、1500、2000、4000。图2是不同粒子数目下100次仿真中三种算法的跟踪概率。从图中可以发现,随着粒子数目的增加,能够稳定跟踪的次数也随之逐渐增加。粒子数目由500增加到2000的过程中,跟踪性能提升较快,在 2000点时,跟踪概率达到82%,较500点时增加了一倍。粒子数目由2000增加到4000时,跟踪概率增长减缓,在4000点时跟踪概率为90%,共增加了8%。
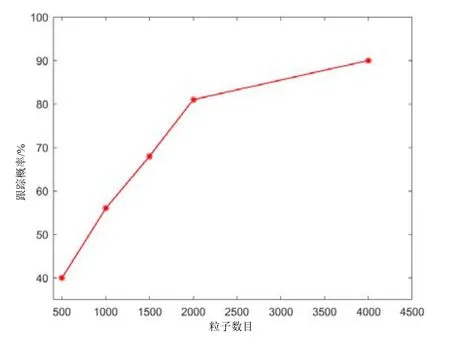
图2 不同粒子数目下100次仿真中三种算法的跟踪概率
表3是不同粒子数目下PF-TBD算法的误差方差统计。同样,当粒子数>2000时,误差的方差虽然有所减小,但很平缓。当粒子数目由500增大到2000时,误差的方差很明显降低。因此,可以得出当粒子数到达2000点时,跟踪性能趋于平缓。

表3 不同粒子数目下PF-DBT算法的误差方差统计
3 实测数据验证
本节利用某次试验采集的数据进一步验证PF-TBD算法在强干扰,弱小目标等环境下的跟踪性能。图3是进行波束形成后的方位历程图。横坐标为目标方位,纵坐标为时间。其中深蓝色且箭头指向的是利用 PF-TBD算法对目标进行跟踪结果。从图中可以看出,在强干扰、多目标条件下,算法依然能够对目标进行稳定跟踪。

图3 PF-TBD算法在实测数据下的验证结果
4 结论
随着信噪比的降低,三种算法的跟踪性能均随之降低,但是PF-DTB算法在低信噪比条件下的性能远远大于其他两种算法,分别是PF和KF的11倍和22倍,PF-DTB算法在理论上证实了其算法的优越性。随着粒子数目的提升,PF-DTB算法的跟踪性能整体呈上升趋势,在2000点以前上升明显,2000以后上升缓慢,当粒子数目为2000点时,跟踪性能趋于平缓。实测数据验证结果进一步验证了PF-DTB算法能够在强干扰、多目标等复杂情况下进行较稳定跟踪。
本论文的研究结果在理论上证明了PF-TBD算法比传统的跟踪算法更具优越性,大大提高了跟踪稳定性,提供了一种被动声呐目标跟踪研究的方向。同时,湖海试数据验证该算法具有实用价值,可以在后期优化后应用到装备中。PF-TBD算法虽然使用基于大规模水听器阵列的湖海试数据进行了较为充分的验证,但考虑到目前实测数据验证工作是基于非实时后期处理,若要保证实时性便难以在阵元数较多的场合使用,因此还需进一步研究如何降低算法复杂度,在时效性上找到一个平衡点,提升工程实际使用效能。
