多基地声呐发射时序优化设计技术
2021-10-13陈立纲李向阳
陈立纲 李向阳
(1.海装驻杭州地区军事代表室,杭州,310023;2.海装驻上海地区军事代表局,上海,200120)
在复杂多变的海洋环境下,利用多个探测节点构成水下分布式多基地声呐系统,是当前反潜战研究的一个重要内容。多基地探测网络由多个声源节点和多个接收节点组成,为充分发挥多基地声呐系统的探潜效能,针对优化节点位置、组网策略等方面已经开展了大量的研究工作[1-4]。
常用的多基地声呐节点位置部署及阵形优化主要采用两类静态配置方法:一类是以多基地声呐探测区域覆盖最大为原则,如卡西尼卵形线多基地声呐配置方法、优势区探测方法等[5-7];另一类则考虑利用时序、波形等要素,基于探测性能或者系统跟踪性能等最大化的声呐配置方法[8-14]。文献[7]中,为了评估当前参数设置下探测系统的性能,构建了一个完备的异构多基地声呐探测系统效能评估模型;依据评估模型对声呐参数以及探测系统阵位参数进行优化,但并未针对时序优化进行研究。文献[10]中,作者给出了基于跟踪性能最优的时序控制方法,但对于运动目标建模过程阐述较为简单,且未对提出方法的有效性进行验证。国内外针对多基地声呐发射时序的研究较为缺乏,且缺少系统性的理论阐述及实验验证结果。
目前的多基地声呐系统采用顺序或者随机选取声源节点发射的时序设计方法,区域警戒的效率不高。本文结合目标运动建模,并利用贝叶斯准则获得警戒区域实时的水下目标存在概率分布,以此通过优化设计声源节点的发射时序,实现区域警戒范围最大化,提升多基地声呐系统的协同探测效能。
1 目标存在概率建模
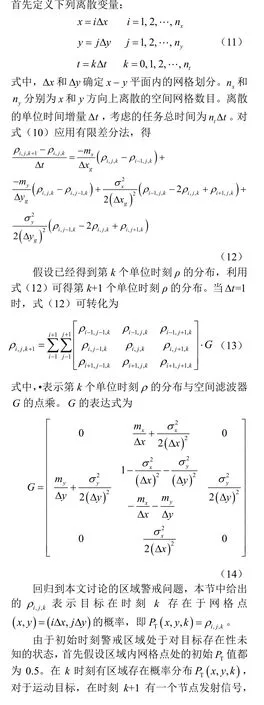
定义“目标存在概率”PT(x,y),表示在(x,y)处存在目标的概率,(x,y)为警戒区域的某个位置。PT(x,y) =0.5,表示不清楚(x,y)处是否存在水下目标;PT(x,y)=0,表明在(x,y)处确定没有水下目标。利用贝叶斯理论,定义目标存在后验概率为

式(1)为主动声呐在执行一次周期探测后警戒区域的目标存在概率。其中,ND表示没有检测到目标, NT表示没有目标存在,T表示目标存在。
通常我们以Pd和Pfa为目标检测概率和虚警概率[15,16],基于表1,式(1)可表述为

表1 检测矩阵

假设目标强度服从瑞利分布,目标检测概率dP可简化为[16]

在噪声背景下,多基地声呐探测信噪比SNR为

式中,DT表示检测阈,SL表示声源级,TS表示目标强度,DI表示指向性指数,TLST和TLTR分别表示多基地声源-目标以及目标-接收节点之间的传播损失,NL表示噪声级。
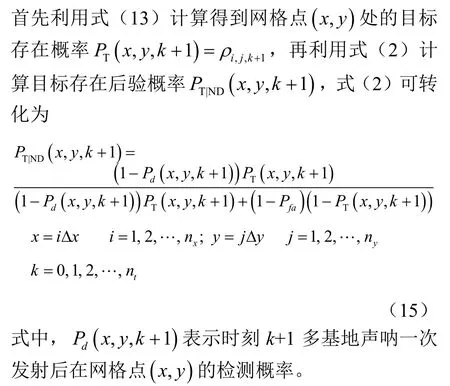
假定已知区域初始PT分布,一旦有声源发射信号,即利用式(2)中的贝叶斯公式对目标存在后验概率PT|ND进行更新。
2 水下运动目标建模
式(1)中考虑的是目标静止条件下的区域某位置存在概率 PT(x, y)的更新规则,本文借鉴文献[17]中的运动目标建模思想,基于Fokker-Planck(FP)方程推导空间滤波器,也称作 FP滤波器,研究在运动条件下的目标存在概率更新规则。
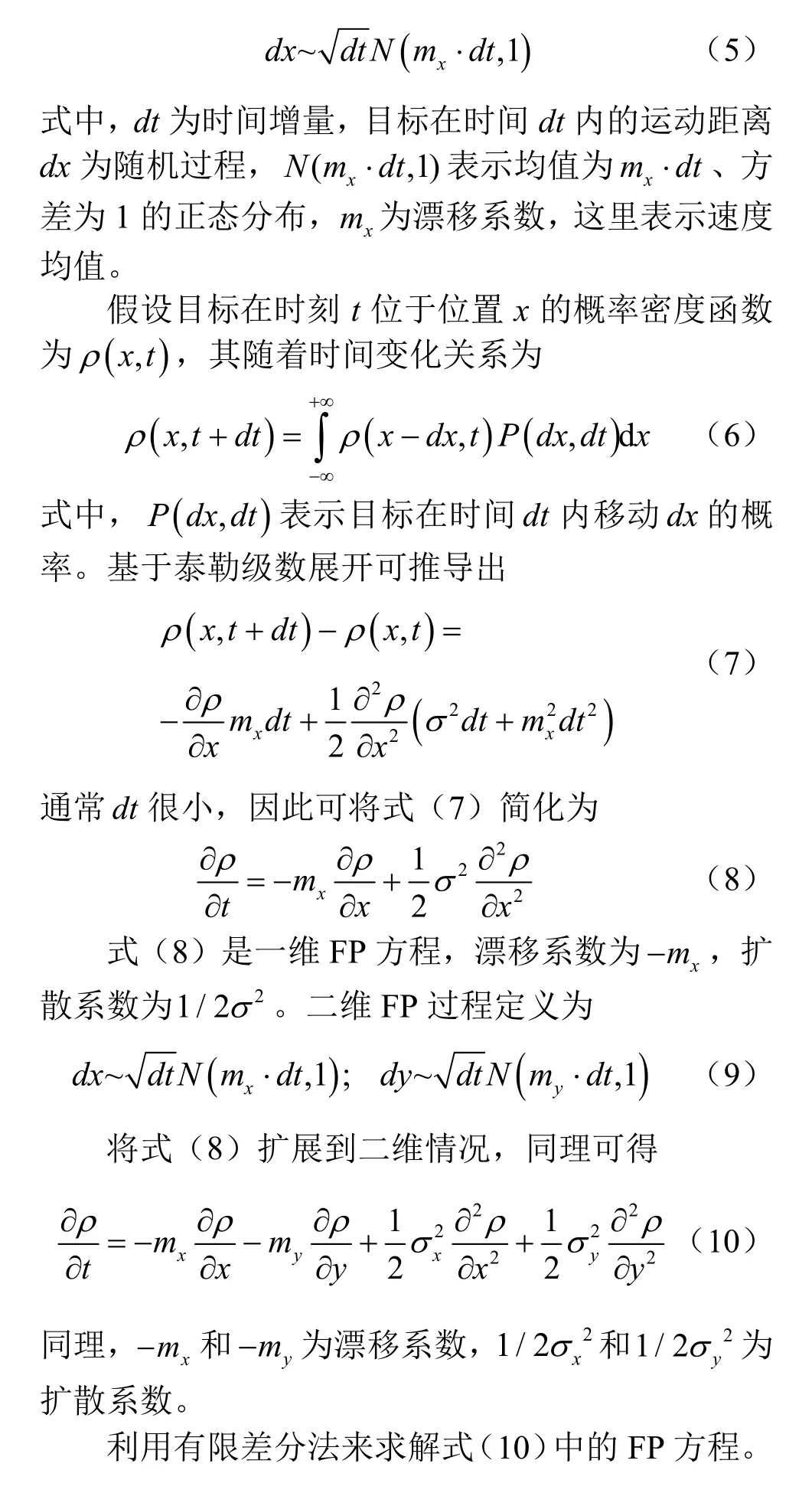
我们利用FP方程和布朗运动对目标漂移和扩散过程进行建模,首先针对一维情况,此时目标运动建模为维纳过程,定义为
3 时序控制问题建模与优化

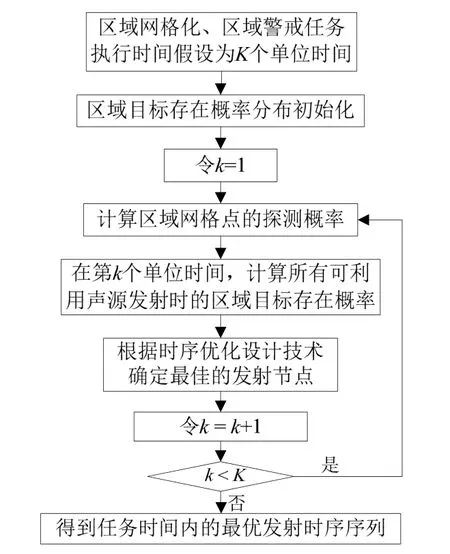
图1 时序优化设计技术流程图
4 仿真分析
考虑如图2所示(红色菱形表示声源,蓝色方格表示接收节点)的多基地声呐水下区域警戒网,包含9个发射声源,28个接收节点,节点等效作用距离为5 km。图2选取的水下警戒区域大小为50 km×50 km,对其进行离散化,得到网格个数为100×100。假设仿真实验中的单位时刻为Δt=1 s。本文目标运动建模为二维维纳过程,其均值和协方差为:mx=my=4 m/s,σx=σy=4 m/s。时刻t=0声源首次发射,每两次发射之间的时间间隔为480 s,这里假定警戒任务的执行时间为 60个发射间隔,即在任务时间内声源发射60次。每个发射时刻选择能够实现区域覆盖率最大的发射节点。
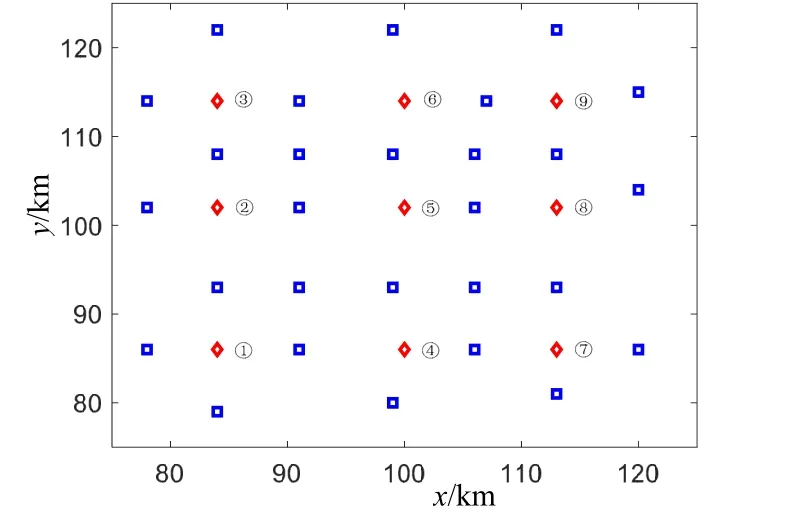
图2 水下区域警戒场景示意图
根据提出的时序设计技术,优化得到发射声源序列示意图如图3(a),顺序时序设计如图3(b),随机时序设计如图3(c)所示。图3中横轴表示时间,纵轴表示可选择的声源的序号,对应于图2中的声源标号。考虑的警戒区域网格内的初始 PT值都为0.5,深蓝色区域表示PT接近0,区域边缘深红色区域表示PT接近0.5。

图3 不同时序设计方法下的声源发射时序示意图
图4(a)表示初始状态下区域 PT分布,图 4(b)、(c)、(d)分别表示针对优化时序设计、顺序选择时序以及随机选择时序设计方法,在任务结束时刻的区域 PT分布。图 4(b)、(c)、(d)中,从深红色到深蓝色的梯度表示存在目标可能从警戒区域外移动进入已经警戒过的区域的不确定性,从而对应的边缘区域的 PT值会增大。这里假设的目标运动模型对应的漂移系数的影响使得目标存在概率朝右上方移动,同时扩散系数带来可扰动性,为了阻止这一效应,发射时序优化设计策略能够选择最佳的发射源发射顺序,从而降低区域的整体PT值,提高区域的覆盖率。
对比分析图 4(b)与图 4(c)、(d)可看出,在相同的警戒时间内,优化时序相较于顺序选择以及随机选择声源发射时序而言,能更有效的“照亮”区域,降低警戒区域目标存在的不确定性,提高区域的覆盖率。
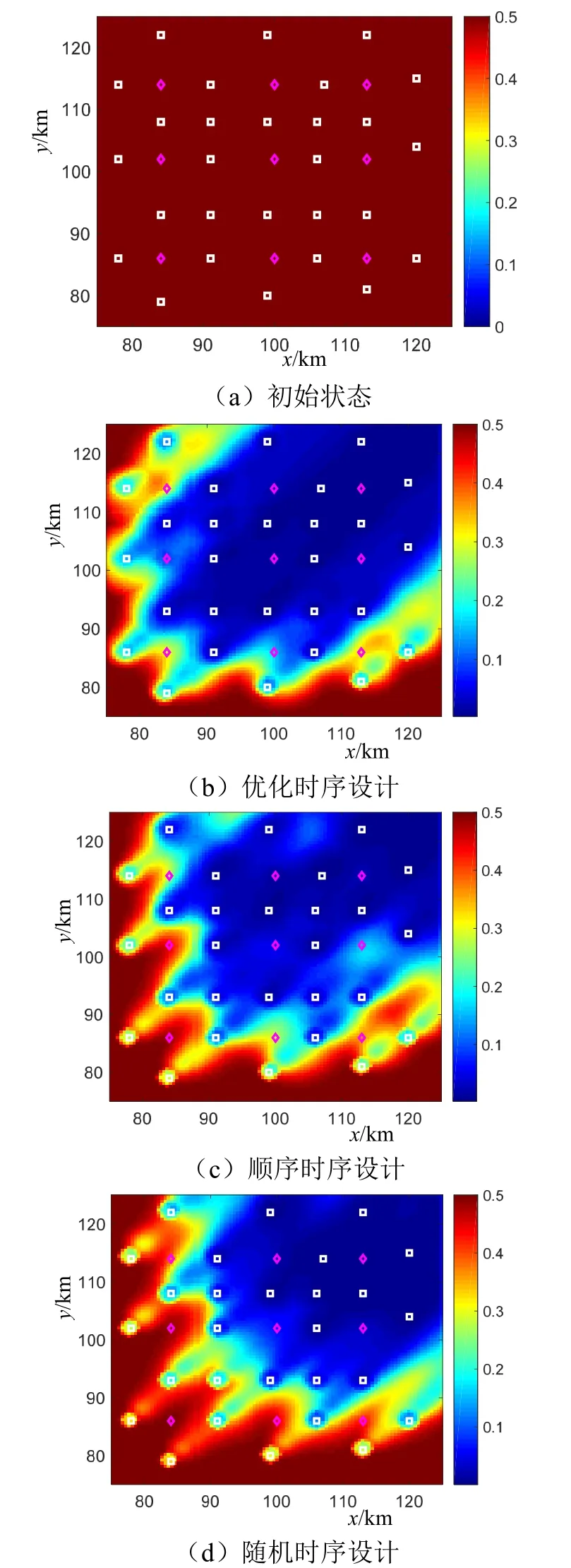
图4 区域PT分布图
将发射时序优化设计技术与顺序时序设计以及随机时序设计这两种方法作对比,得到的警戒区域的覆盖率随发射次数变化的对比曲线如图5所示。从图5中可以看出,发射时序优化设计技术相比于顺序发射以及随机发射时序设计方法,覆盖率能提升 20%~50%左右,且能更快更稳定地“照亮”区域,降低警戒区域目标存在的不确定性,实现对区域更有效的警戒。
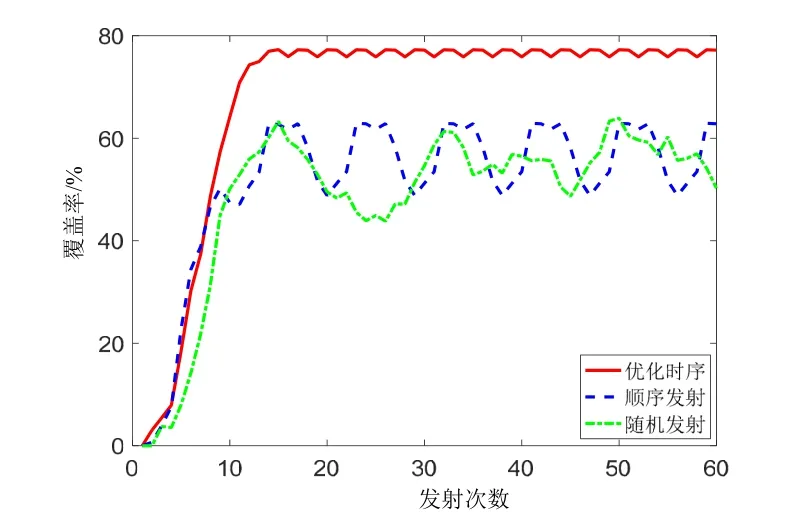
图5 三种发射时序设计方法得到的覆盖率变化关系曲线
5 结论
本文提出了一种面向水下区域警戒的多基地声呐发射时序优化设计技术,建立了基于目标存在概率的多基地声呐时序优化问题数学模型。仿真结果表明,该技术通过优化多基地声呐网中声源节点的发射时序,能够较好提升警戒区域的覆盖率,达到更快速高效地执行水下区域警戒任务的目的。
