双腿康复机器人设计
2021-10-12姚威威邢丽坤
姚威威,邢丽坤
(安徽理工大学 电气与信息工程学院,安徽 淮南 232001)
如今在所有的医疗器械当中,康复医疗器械占有很大一部分,不管是从国外的研究情况还是从国内的市场来看,康复医疗器械都发展很好.截止到2019年,我国共有6 000多个康复理疗机构,其中用于肢体残疾治愈训练的机构不到1/3.我国残疾人共有8 612万人,其中下肢残疾1 356万人,仅有16.4万的下肢残疾患者有过康复训练[1].所以,治愈配备供给之间有很大缺口.
未来的康复医疗器械必定向着智能化、自动化、人性化的方向发展.现在的医疗康复器械行业呈“百家争鸣”的状态,但是真正能够做到人性化的发展是少之又少.随着互联网行业的发展,康复医疗器械已逐渐向互联网方向靠近,这也正是医疗康复器械技术障碍.为了向未来方向发展和占据未来医疗康复器械的市场,此次设计增加了与互联网挂钩的想法,让康复机器人根据患者的状态来设定康复训练的具体计划[2].
康复机器人是一种康复病人、帮助病人恢复正常人生活状态的一种机器人[3].与传统的医疗康复机器人相比,本设计的双腿康复机器人有很多自身的优点,在所有功能都能实现的状况下,设计一款体积小、造价低、性能高的康复机器人,用来康复病人的同时利用互联网技术将病人的实时状态康复数据上传,在线供医生参考,同时医生可以在线指导康复训练,极大缓解了中国社会医护人员数量不足的状况.
1 系统设计
此次设计主要针对下肢瘫痪患者的康复训练.目前已有的康复机器人只存在于康复机构且价格昂贵、体积大[4].本文所设计的多功能康复机器人是一种小型适合家用的机器人,具有更加智能化特点,以下是具体模块介绍,设计流程如图1所示.

图1 系统设计框图
(1)机械结构设计
先进行机器腿部设计,模拟人体腿部结构.用单片机做控制核心,用六自由度舵机模拟膝盖、脚踝、跨关节,用延展材料模拟人体腿部躯干.再设置腰部机械结构,设计一个腰部护板保护人体安全,前面加一个弹性材质的防护带.最后进行整体框架的机械结构设计,主要用来保证整个机器的安全性、稳固性.
(2)硬件设计
硬件方面主要包括几个电路设计.自动升降系统是利用推拉杆辅助人体的坐起,单片机向继电器发送指令控制推拉杆的伸缩来完成机器腿部的自动升降,该装置方便病人由坐姿状态变为站立状态,其框架起到保护病人的作用,病人在康复训练中不会摔倒,从而更好地帮助病人康复训练.在膝关节处安装压力传感器,人的膝盖接触到传感器且压力值达到阈值时压力传感器会向继电器发送信号带动舵机运动.在这种模式下,机械腿通过压力传感器感应到病人的抬腿动作从而执行科学的康复动作组训练.此功能将人的被动康复训练转变成主动训练,达到病人自主式行走的锻炼方式,可以增强其康复信心[5].训练时将肌电贴片贴在皮肤表面启动数据监测功能,通过显示屏幕可以显示病人的双腿运动次数,同时肌电传感器实时监测病人大脑给腿部肌肉传输的脉冲电信号,再通过路由器和Wi-Fi模块将传感器检测到的脉冲信号传给远程云端医生监控平台,医生根据传输来的数据实时制定新的康复计划,以此保证专业康复训练.
(3)软件设计
本次设计围绕STM32单片机为核心,显示屏用1602,电路图采用画图软件Proteus,继电器相当于控制开关,舵机控制板控制舵机.
2 机械结构
2.1 腿部机械关节设计
该结构需要实现人体腿部的自动抬升和弯曲,因此机器人的腿部设计与人体腿部构造相同,利用舵机模仿人体腿部的关节,舵机的旋转模仿人腿部关节的弯曲,但人体关节可以空间多角度旋转,舵机只能在一个位置进行旋转,因此用六个舵机,分别分布在人体的大胯、膝盖和脚踝三个位置.
之后,通过一定强度的连杆两两连接舵机,其中一个舵机的转动会带动连杆的转动,当所有舵机都通电后,每个舵机都固定到原始状态,只要将调好的动作组下载到舵机的驱动板中,在开启电源后舵机会自行实施已调好的动作组,这些动作组的执行会带动舵机之间的连接杆,通过这样的结构和运动状态,机器人腿部运动就可以模仿人走路的状态.为了可以更好地帮助人体腿部运动,在机器人腿部加上固定装置,将人腿绑在连接杆上,这样人腿就会随舵机的运动而运动.此装置结合人体腿部的构造,加上合适的驱动原件设计一套六自由度双足机器人,此机器人能够有效实现人行走状态的部分功能,只要将机器人模仿人类走路的动作组下载到舵机的驱动板上,然后机器人开始执行这些动作.通过这样的机械设计和逻辑顺序动作组就可以实现人腿部的抬升和伸屈等动作,腿部结构图如图2所示.
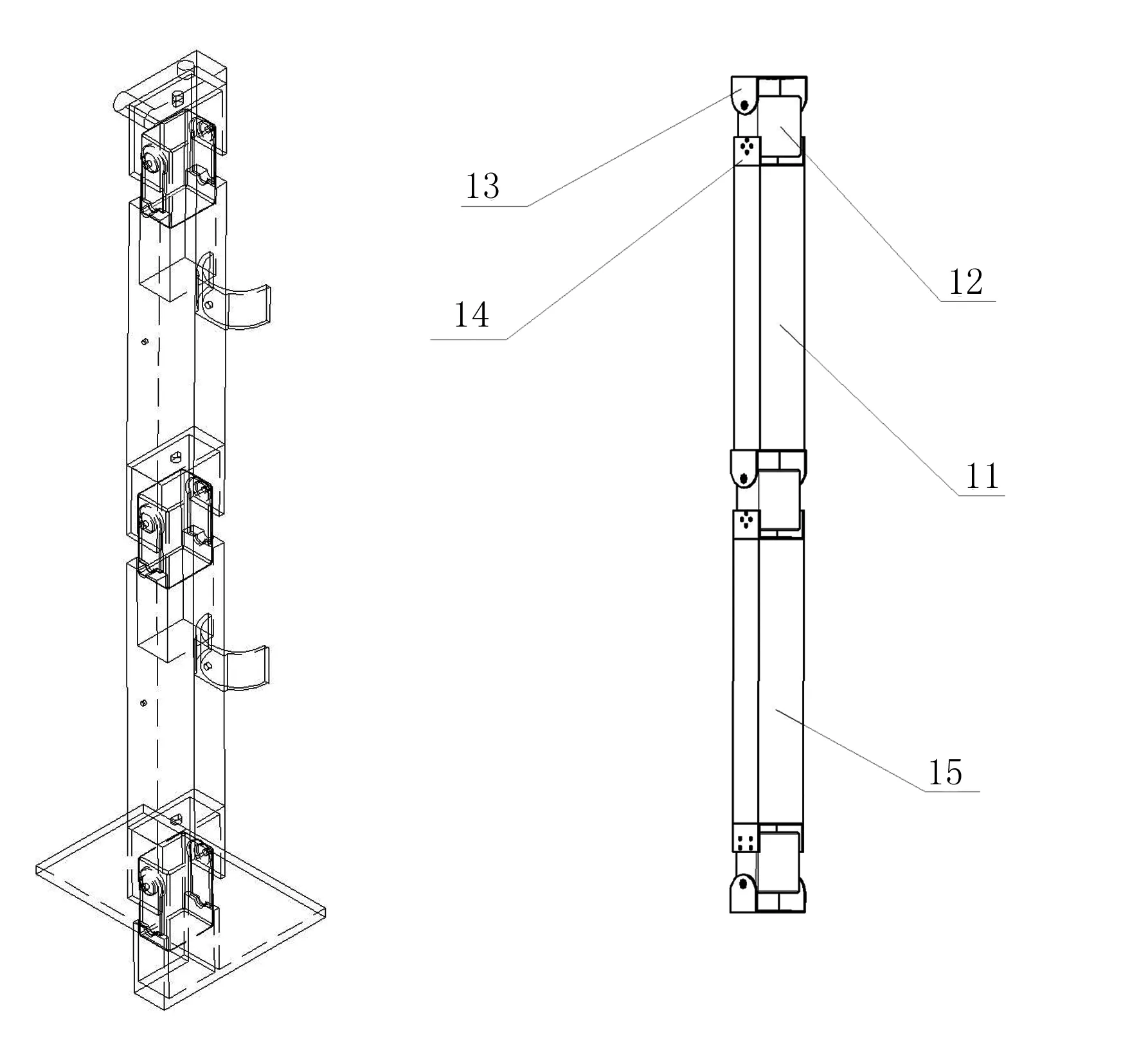
11:上肢机械腿;12:LDX-218双轴舵机;13:LDX-218双轴舵机上支架;14:LDX-218双轴舵机下支架;15:下肢机械腿图2 腿部结构图
将其与木质连杆连接,舵机运动时通过下支架带动模拟的大腿躯干运动.舵机模拟人体腿部关节,提前在舵机控制板上设置好转角速度以及转角幅度,六个舵机都在控制板上进行功能指令后进行运动以达到模拟人腿自由行走的姿态.此设计中用木条模拟人腿大腿部位.
2.2 机器人腰部机械设计
在设计身体稳定装置时考虑病人的实际情况,采用安全带将病人的腰部和背部缚住,将这些安全带的一端固定在一个靠背装置上,通过启动推拉杆升降可将人体抬起来.另外,双腿无力的病人需要在外人的搀扶下将双腿绑在机器人双腿的两侧,在这种情况下需要控制病人的平衡,为了更加容易地把病人稳住,在此装置上增加一个座位装置,这样病人会更加容易控制平衡,对外人来说,只需要帮助病人扶到这个座位装置,通过上述起身装置将人体慢慢升起来.这个座位装置就是固定在底座,机器结构如图3所示.
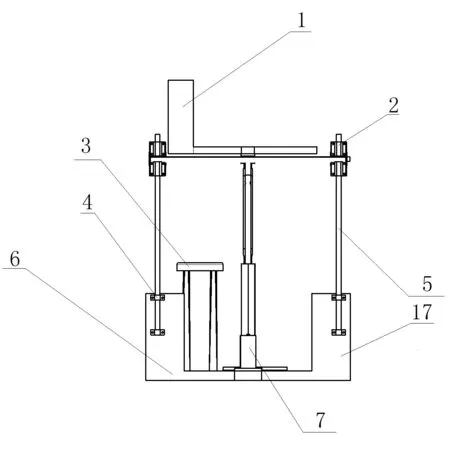
1:背靠靠板;2:光轴自锁滑块;3:辅助座椅;4:立式轴承光杆座;5:光轴滑杆;6:底座;7:电动推拉杆;11:上肢机械腿;12:LDX-218双轴舵机;13:LDX-218双轴舵机上支架;14:LDX-218双轴舵机下支架;15:下肢机械腿;16:推拉杆地板;17:底座固定板
3 硬件设计
3.1 压力传感器的使用设计
本次设计所用的压力传感器HX711AD具有灵敏度高、稳定性好等特点[6].具体工作原理和流程是先设置一个较小的压力值(阈值),压力值会在1602屏幕上显示出来,当病人的腿部向前屈伸碰到压力传感器时,触碰的力量达到阈值会启动压力传感器,此时压力传感器会向单片机发出指令,单片机再发送给继电器一个信号,继电器通电,此时压力传感器的电路部分工作结束.继电器会向控制舵机的单片机发出指令带动舵机控制板控制舵机按照设置角度运动.压力传感器的工作流程如图4所示.
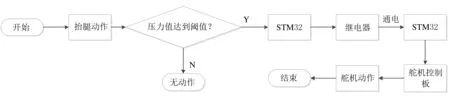
图4 压力传感器工作图
3.2 肌电传感器的使用设计
此次设计采用的肌电传感器是基于大数据平台(青莲云)的一款集检测与反馈于一体的传感器,肌电传感器的原理是通过贴在腿部皮肤表面的敏感贴片检测到大脑向腿部肌肉传输的脉冲电信号,将采集到的肌电信号发送给肌电传感器,经过AD8221信号进行放大后传给单片机,单片机与Wi-Fi模块相连将数据传向云端.在另一端医生可以用手机连接云端数据平台看到患者的数据,依据数据对患者的病情做出相应的判断,肌电传感器工作流程如图5所示.
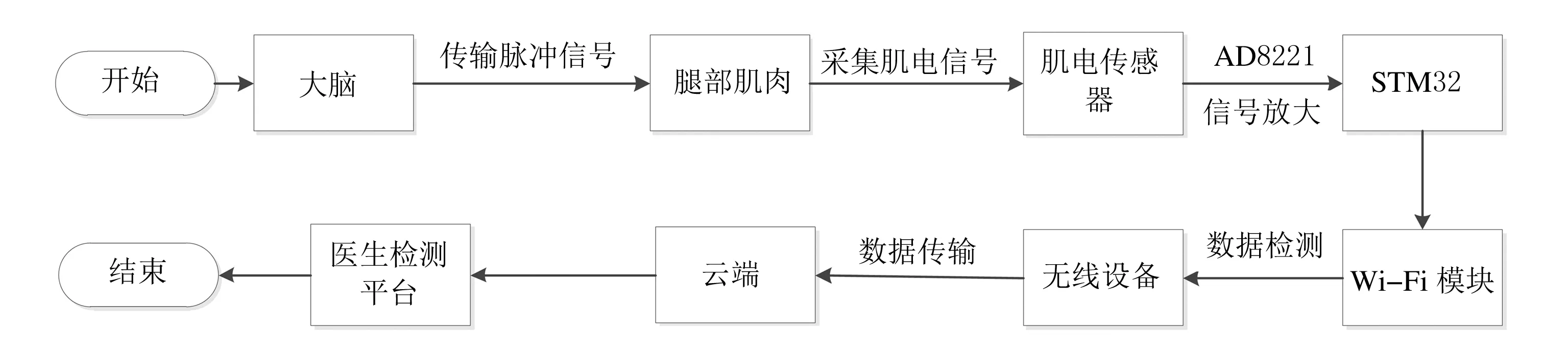
图5 肌电传感器工作流程图
肌电传感器的功能是数据监测,在人反复康复腿部的训练过程中可以对康复的训练次数进行计数和肌肉康复状态的实时监控,先给病人一个科学的康复训练次数指标,然后通过肌电传感器实时监测病人肌肉的状态数据,其更加标准和科学,通过数据监测显示该病人的实时训练状态,这样就会给病人一个科学康复训练方法,此数据能够显示病人的康复指标,在一定程度上给病人一种信心和精神鼓励,提高其康复训练效率.
4 软件设计
单片机上电,进入初始化状态,按下按键1单片机向STM32发送串口命令,舵机执行命令进行低速旋转,再按一下按键1,舵机停止.按键2的功能与按键1相似,只是按键2执行的是高速旋转.按键3向继电器发送指令,继电器上电后系统停止运动的同时蜂鸣器发出警报起到报警作用,整个软件设计流程如图6所示.
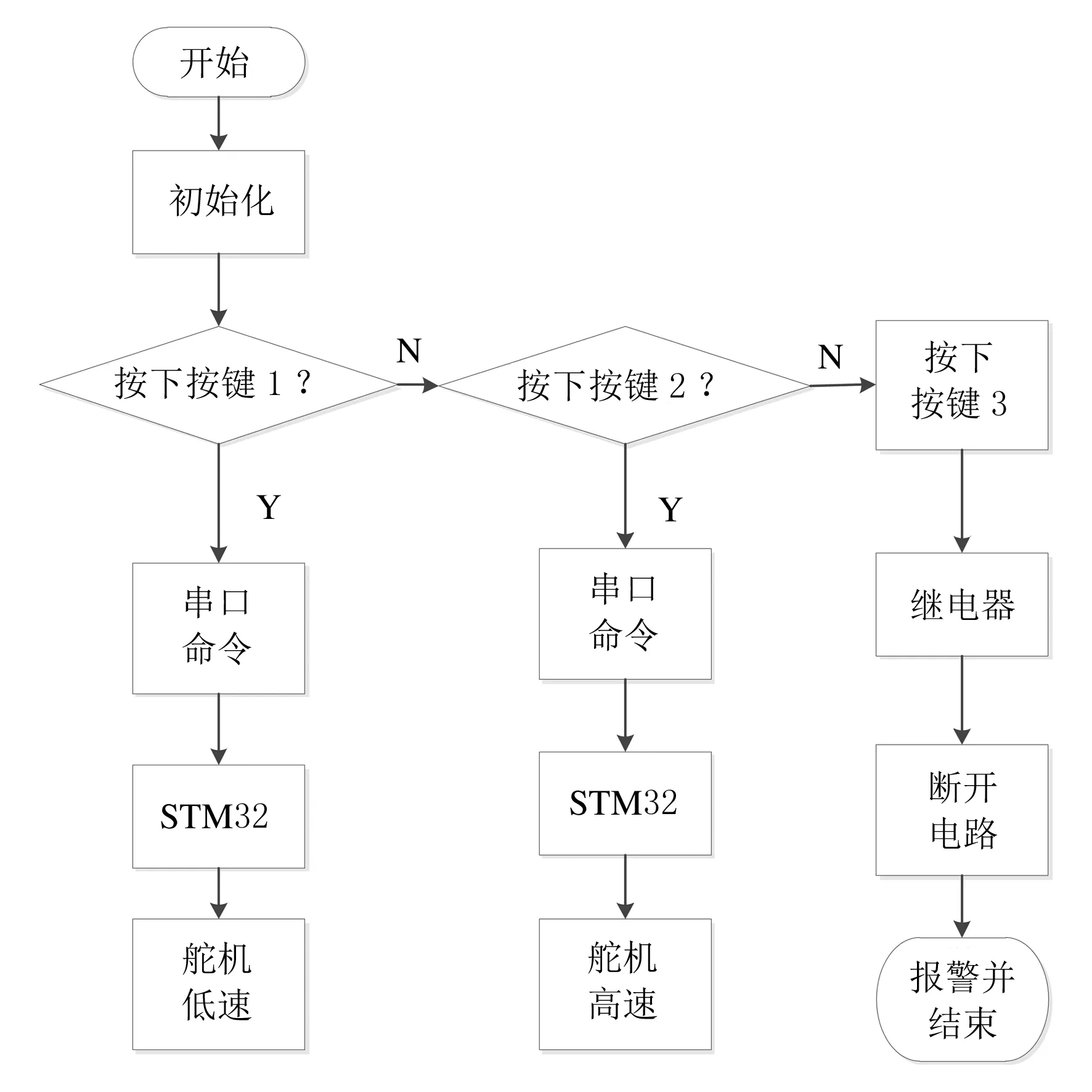
图6 流程图
根据压力传感器流程图来编写压力传感器程序,因为压力传感器的作用是判定患者腿部运动的极限距离或者患者运动的最大力度,所以根据患者的实际情况编写压力传感器的阀值,同时根据患者康复时间的长短来改变压力传感器的阀值,并且这个压力传感器整个流程为一个闭环控制系统,在人腿运动的力度未达到阀值时,机器人没有动作,如果人腿的运动超过了设定值,机器人开始进行康复训练[7].
此程序的编写主要就是压力传感器检测,主控芯片为单片机.首先在程序中定义按键端口和继电器端口,并且定义相应的字符变量.然后初始化压力传感器的程序,程序中赋压力传感器初值.当压力传感器感应到外界压力时电阻会发生变化,此时电流也会发生变化,产生一个电平给继电器,继电器接到信号就会动作,接继电器的端口电平就会发生变化,根据所编写的程序,单片机会发一个指令给蜂鸣器,蜂鸣器就会报警告诉瞬时压力值超过所设定的压力初值,这就是压力传感器控制的具体工作流程,软件程序就是根据此流程来编写,工作过程如图7所示.

图7 压力传感器流程图
按照设计标准制作得到康复机器人原型机如图8所示.
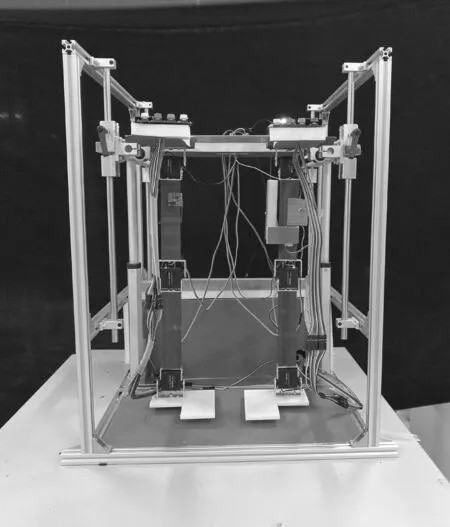
图8 机器人原型机图
5 结论
双腿康复机器人通过仿真试验、实物调试,得到以下结论:①机器人有3种速度可以选择,供不同情况患者和不同阶段接受康复训练的人选择;②通过数据平台,可以实现医生和患者线上实时交流,医生可以及时掌握患者训练数据并制定新的训练计划反馈给患者;③机器体积较小,适合小型机构和家庭使用,缓解了家庭陪护人员的压力;④在膝盖处安装压力传感器,将被动运动转为主动运动,增加患者康复信心.