基于整车十自由度模型的商用车驾驶室半主动悬置系统研究
2021-10-11钟绍华张艺腾
桂 航,钟绍华,张艺腾
(武汉理工大学 汽车工程学院,武汉 430070)
商用车广泛运用于物流运输和工程作业,具有工作时间长,操作复杂等特点,因此保证车辆的乘坐舒适性,是提高作业效率和保证安全的重要措施。商用车驾驶室悬置是车辆主要的隔振系统,其性能优劣直接影响驾驶员的乘坐舒适性,故对驾驶室悬置系统进行研究具有突出意义。
早期的驾驶室用橡胶块与车架直接联结,但是橡胶块并不能起到很好的隔振效果。为了改善车辆的乘坐舒适性,在驾驶室和车架之间增加悬置系统,采用螺旋弹簧和减振器来隔振,使车辆的乘坐舒适性得到较大地改善。为进一步降低车身垂直振动的加速度,人们采用刚度更低、固有频率小的气囊弹簧来替代钢制螺旋弹簧;为了抑制车身的侧倾,采用横向稳定杆来增加车身的侧向稳定性,这些改进使车辆的乘坐舒适性得到进一步的提升。以上悬置系统的刚度和阻尼都是固定不变的,因而这种悬置被称为被动悬置。
商用车的使用环境复杂,行驶工况多变,客观上要求悬置系统的刚度和阻尼能根据车辆的行驶工况进行实时调节,从而使悬置系统始终保持最佳减振状态。为了实现刚度可变,人们采用空气弹簧来代替原有弹簧,以空气为动力来源灵活调整弹簧刚度;为了实现阻尼可变,人们采用磁流变阻尼器来代替原有阻尼器,使阻尼力可进行无极调节。改进后的悬置系统对于行驶工况具有一定的适应能力,通过主动控制实现刚度、阻尼均可调节的悬置称为主动悬置,刚度或阻尼之一可调节的悬置称为半主动悬置。
国内外学者在悬置系统上做了大量的工作。闫鑫[1]通过实车平顺性试验采集数据,在ADAMS中建立悬置系统的多体动力学模型,为悬置系统隔振参数的正向设计提供了理论依据。周才[2]针对悬置系统中的减振器刚度和阻尼进行优化,得到了更符合结构的参数。李彬等[3]设计DOE(design of experiment)试验优化了悬置的刚度和阻尼,改善了驾驶室的隔振特性。Güvenc等[4]的研究表明半主动悬置相比被动悬置能有效抑制振动。Ekberg等[5]针对商用车半主动悬置系统进行LQR(linear quadratic regulator)控制分析,得到可提升整车平顺性的结论。刘巧斌[6]对液压悬置与半主动悬置进行对比研究,从隔振率积分角度对比分析,得出半主动悬置隔振率更好的结论。
本文以某型号重型卡车驾驶室悬置系统为研究对象,根据其整车十自由度简化模型建立MATLAB/Simulink仿真模型。再基于PID(proportional-integral-derivative)算法和模糊自适应PID(fuzzy adaptive PID)算法设计最优控制器以控制其阻尼力,将其改进为半主动悬置。以降低驾驶室质心处垂向、侧倾和俯仰加速度响应为目标,对驾驶室悬置系统的平顺性进行仿真研究与试验验证。
1 驾驶室悬置系统建模
过往研究一般采用悬置1/4模型或者驾驶室悬置作为隔离体来进行单独研究,激励为试验数据或者扫频输入。对于可控元件组成闭环控制系统的半主动悬置而言,它需要实时根据整车加速度响应、车辆外界输入等信号调整阻尼器参数,单独研究存在无法顾及其他减振机构、响应滞后等问题。研究半主动悬置控制算法需要一个精准度更高、能全面反映车辆姿态的模型。
1.1 路面输入模型
本文选取的车辆为重型商用车,通过查阅文献以及实际调研,该车一般行驶在高速路面以及城市郊区路面,故选用B级路面作为本文的模拟仿真路面。根据GB 7031-86《车辆振动输入—路面平度表示方法标准》文件与文献[7],本文采用滤波白噪声法来建立路面输入模型,其公式为

式中:n00为下截止空间频率,n00=0.11 m-1;u为车辆的车速;q(t)为随机路面高程位移;n0为参考空间频率,n0=0.1 m-1;Gq(n0) 为路面不平度系数,B级路面为Gq(n0)=64×10-6m3;W(t) 为均值为0的高斯白噪声。
1.2 半主动悬置动力学模型
根据以往研究,建立的模型所含自由度越多,越能反映整车的真实姿态,但同时也会使模型的建立和求解变得复杂。由于整车驾驶室存在结构复杂、构件过多等不利因素,为了便于驾驶室半主动悬置的模拟仿真分析,本文将建立一个包含车架和驾驶室垂直、侧倾和俯仰方向振动的十自由度整车模型。该模型综合考虑轮胎、悬架对悬置系统的影响,精准度较高。
笔者对以下系统进行适当简化。假设:①驾驶室和车架均为有质量、无弹性的刚体;②车轮系统为由弹簧kti和质量mi组成的无阻尼、有弹性的单自由度系统,其中i为悬挂点编号;③悬架系统为由弹簧kbi和阻尼cbi组成的有弹性、无质量的被动减振系统;④悬置系统为由弹簧kci、阻尼cci和作动力fi组成的有弹性、无质量的半主动减振系统。完成以上假设后,根据x指向车辆行驶方向,y垂直地面向上,z为整车侧向的坐标系,建立如图1所示的整车数学模型。

图1 整车悬置系统十自由度模型Fig.1 Ten degrees of freedom model of vehicle suspension system
4个车轮输入随机路面振动qi,得到车架的z5,z6,z73个自由度以及驾驶室的z8,z9,z103个自由度。令车架姿态Zb=[z5z6z7]T,驾驶室姿态Zc=[z8z9z10]T。基于牛顿第二运动定律,可以得到如下系统动力学方程:
(1)悬挂部分

以矩阵状态表达

(2)车架部分


以矩阵状态表达
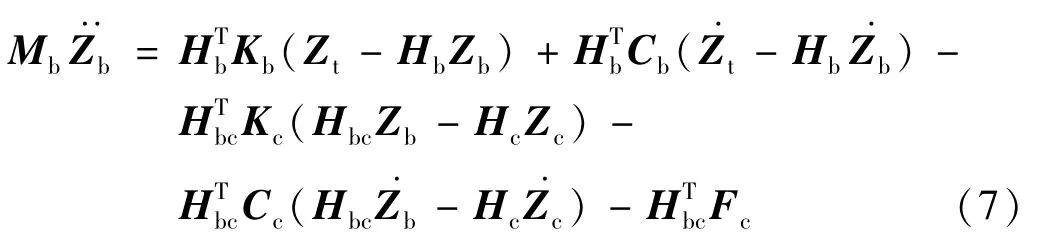
(3)驾驶室部分
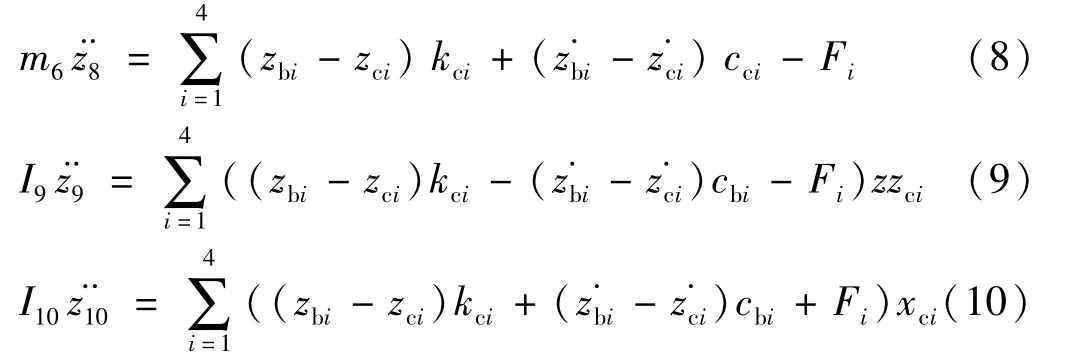
以矩阵状态表达

式中:Mt=diag(m1,m2,m3,m4);Mb=diag(m5,I6,I7);Mc=diag(m6,I9,I10);Q=[q1q2q3q4]T;Zt=[z1z2z3z4]T;Kt=diag(kt1,kt2,kt3,kt4);Kb=diag(kb1,kb2,kb3,kb4);Kc=diag(kc1,kc2,kc3,kc4);Cb=diag(cb1,cb2,cb3,cb4);Cc=diag(cc1,cc2,cc3,cc4);Fc=[F1F2F3F4]T。

式中:(xbi,ybi,zzbi) 为车架悬挂点坐标;(xci,yci,zzci) 为驾驶室悬置点坐标(i=1,2,3,4);(xc,yc,zzc) 为驾驶室质心坐标。
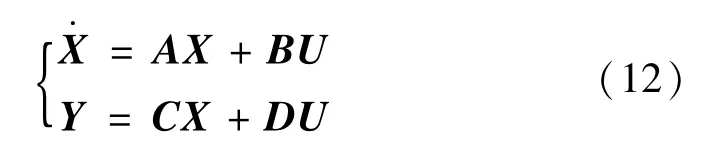
式中,A,B,C,D均是数学矩阵,分别为20×20的系统矩阵、20×8的控制矩阵、6×20的观测矩阵以及6×8的传递矩阵。
2 控制器设计研究
为优化整车的平顺性,需要一个主动控制器来控制悬置系统在不同工况下阻尼力的大小。主动控制器通过输入一个已知系统变量,内部运算后计算出最佳控制力,再将其输入至驾驶室悬置系统中抑制驾驶室振动,从而提升乘坐舒适性,原理框图如图2所示。一个效果良好的主动控制器应当有合理的逻辑力控制以及匹配系统的控制算法。

图2 半主动悬置系统原理框图Fig.2 Functional block diagram of semi-active suspension system
2.1 最优控制力
本文的优化目标是使驾驶室质心处的振动加速度响应尽可能的小,为了达到这个目的需要主动控制器提供合适的力来进行驾驶室姿态调整。可根据系统输出的垂直、侧倾和俯仰3个方向的速度和加速度来设计垂直、侧倾和俯仰三向的控制器,原理框图如图3所示。
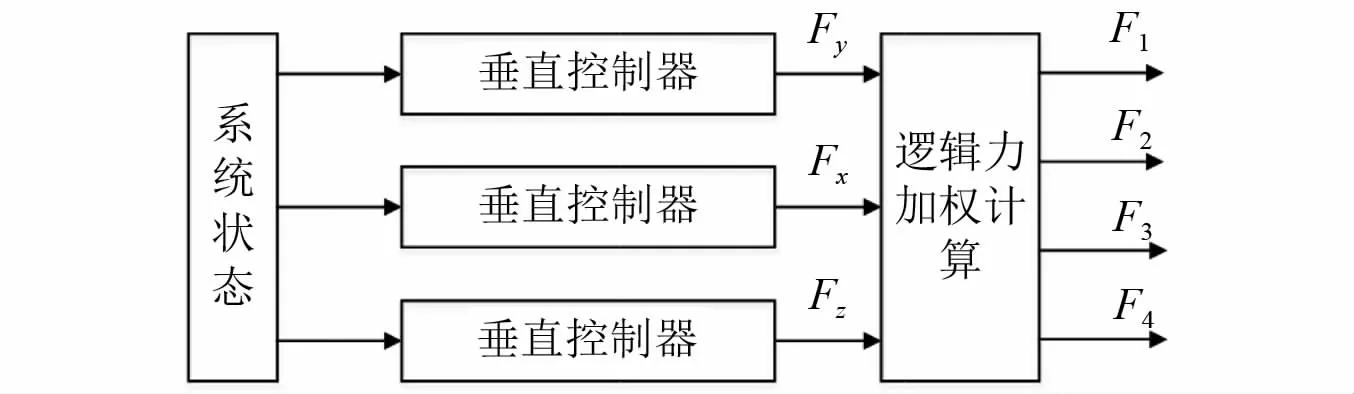
图3 最优控制力原理框图Fig.3 Principle block diagram of optimal control force
驾驶室发生垂向振动时,4个阻尼器提供与垂直方向相反的阻尼力,即垂直控制器输入驾驶室质心处的垂向速度与加速度,计算得到控制力Fy;驾驶室发生侧向振动时,左侧两阻尼器与右侧两阻尼器提供与振动方向相反的阻尼力,即侧倾控制器输入驾驶室质心处的侧倾角速度与侧倾角加速度,经计算得到控制力Fx;驾驶室发生俯仰振动时,前端两阻尼器与后端两阻尼器提供与振动方向相反的阻尼力,即阻尼器俯仰控制器输入驾驶室质心处的俯仰角速度与俯仰角加速度,经计算得到控制力Fz,如图4所示。

图4 驾驶室垂直、侧倾、俯仰振动分析Fig.4 Vertical,roll,and pitch vibration analysis of the cab
3个控制器的控制力进行逻辑力加权计算后得到每个悬置点的最优控制力。4个悬置点的最优控制力可用Fi=aiFy+biFx+ciFz(i=1,2,3,4)来表达,其中ai,bi,ci均为加权系数。假设4个阻尼器的性能相同,即a1=a2=a3=a4,b1=b2=b3=b4,c1=c2=c3=c4。 令Fyxz=[FyFxFz]T故可写出Fc=HdFyxz,加权矩阵
2.2 控制器设计
2.2.1 Smith-PID控制器设计
PID控制器是一种结构简单、参数明确、鲁棒性优秀、耐用性好的线性控制器,它可以通过对比理论值与实际值的偏差情况来计算最优控制力,从而减小偏差,增强系统的稳定性。在驾驶室半主动悬置中,控制规律可用式(13)表示

由于在半主动悬置系统中存在滞后现象,单纯的采用PID控制可能会影响控制效果。为了解决此问题可在PID控制器中加入一个Smith控制器来补偿被控制对象里的纯滞后部分。整个Smith-PID控制器如图5所示。 图中:X(s)为系统输入量;Gp(s)为修正的受控对象模型;F(s)为输出的控制力。

图5 Smith-PID控制器原理框图Fig.5 Schematic diagram of Smith-PID controller
一般来说,改变PID控制器的3个参数可以改变系统的响应曲线。单纯形法是一种常见的寻优算法,相比于其他算法具有不计算梯度、直接搜索的特性,因此算法轻便,精度高。假定系统输入的是阶跃曲线,以驾驶室质心的垂直、侧倾、俯仰3个方向加速度均方根值最低为优化目标,在MATLAB工具箱中使用单纯形寻优[8]即可得到最优的PID参数值。
2.2.2 模糊自适应PID控制器设计
在实际工作中,PID控制器虽然有着结构简单、鲁棒性好等优点,但也存在参数一旦整定就无法修改的缺点,这在一定程度上限制了PID控制器的发挥。由于PID控制器的3个参数在实际应用中有着强非线性的特征,很难建立其精确的数学模型。有学者提出采用神经网络[9]以及模糊控制[10]来设计半主动悬置控制器。相比于神经网络,采用模糊控制的模糊自适应PID控制器具有控制对象不需要建立精确的数学模型的特点,它将PID控制器与模糊控制器进行融合,可实现PID控制器参数实时整定。其原理框图如图6所示。
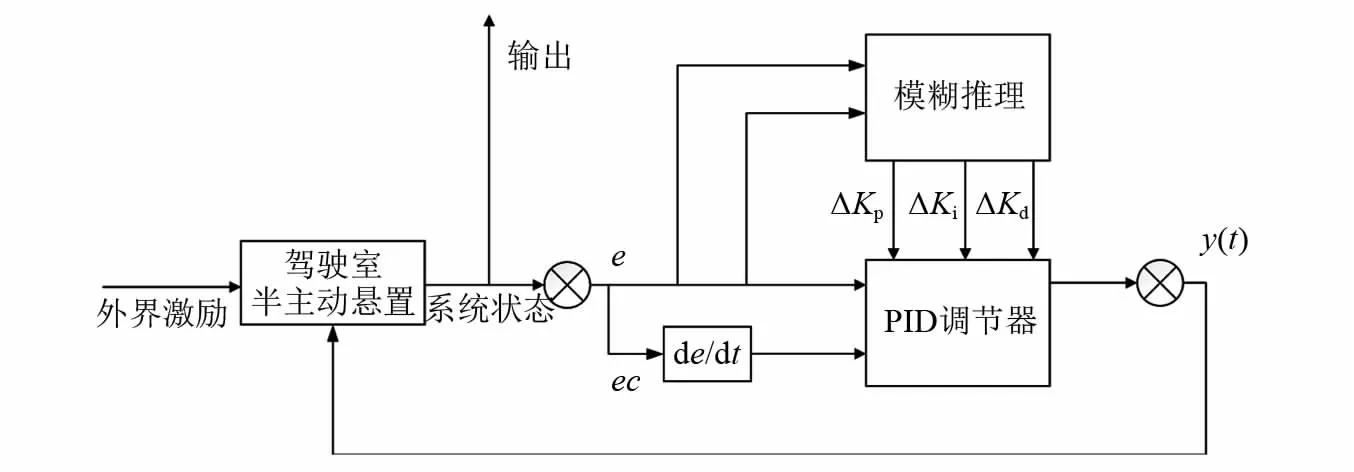
图6 模糊自适应PID控制器原理框图Fig.6 Functional block diagram of fuzzy adaptive PID controller
由于3个控制器设计方法类似,本文以垂直方向的模糊自适应PID控制器设计方法进行论述。笔者参照模糊控制理论[11],并基于PID控制的实际经验[12],选取驾驶室质心垂直方向速度与加速度为误差(e)和误差变化率(ec)输入,ΔKp,ΔKi,ΔKd为经过模糊计算后的输出。其中误差和3个输出的论域为[-4,4],误差变化率的论域为[-3,3],隶属函数采用高斯型,模糊子集用{NB,NM,NS,O,PS,PM,PB}变量表示,建立如下的模糊控制规则

式中:An,Bn,Cn,Dn,En分别为e,ec,Kp,Ki,Kd的模糊集合,n=1,2,3,…。模糊控制规则由专家经验和实际情况确定,在本次设计中,当e较大时,无论ec的大小,均应输出反向较大的力使e有减小的趋势。当e较小,但ec较大时,输出较大的力抑制ec,当ec较小时,应输出较小但与ec方向相反的力,以使e稳定在较小值附近。以此类推,根据如上原则设计3个输出的控制规则。以ΔKp控制规则为例,如表1所示。

表1 ΔK p控制规则Tab.1ΔK p control rules
隶属函数由μA(x)表示,解模糊使用重心法,如以下公式

式中:μA(x)为输入变量x对应的隶属度;z为解模糊后的输出。
3 仿真计算与对比
为了验证所设计包含的Smith-PID控制器和模糊自适应PID控制器的半主动悬置相对于被动悬置的性能差异,笔者基于某款已完成相关数据测试的整车系统[13],运用数学软件对控制器性能优劣进行模拟仿真和计算。仿真所要用到的数据如表2与表3所示。

表2 整车系统参数Tab.2 Vehicle system parameters

表3 几何参数Tab.3 Geometrical parameters m
3.1 控制器作动力对比
以驾驶室右前悬置在u=60 km/h情况下的控制力F1为例,如图7所示。图7(a)为Smith-PID控制器的作动力变化情况,图7(b)为模糊自适应PID控制器的作动力变化情况。从图中可看出,采用PID控制器的作动力在-400~400 N内,而采用模糊自适应PID控制器的作动力在-600~400 N内。由于采用模糊自适应PID控制器的半主动悬置相对于采用PID控制器的半主动悬置控制效果更优秀,对振动抑制能力更明显,所需要的能量更多,所以控制力相对较大。

图7 控制器作动力对比Fig.7 Comparison of controller power
同时也可看出,PID控制器的作动力变化频率较大,系统较为粗糙,稳定性有待改善;而模糊自适应PID控制器的作动力变化平缓,在波峰处圆滑过渡,控制精度更高。
3.2 控制器效果对比
为了综合验证不同控制器的效果,分别将车速设为30 km/h,40 km/h,50 km/h,60 km/h,70 km/h,80 km/h,90 km/h,得到不同速度下不同控制器的驾驶室质心处垂直、侧倾、俯仰加速度响应。
以u=60 km/h为例,驾驶室质心处垂直、侧倾、俯仰加速度响应对比如图8~图10所示。由图可知,相较于被动悬置系统,半主动悬置系统对驾驶室的三向加速度有一定的优化,且两种控制器控制效果不同。

图8 垂向加速度对比Fig.8 Comparison of vertical acceleration

图9 侧倾角加速度对比Fig.9 Comparison of roll angle acceleration
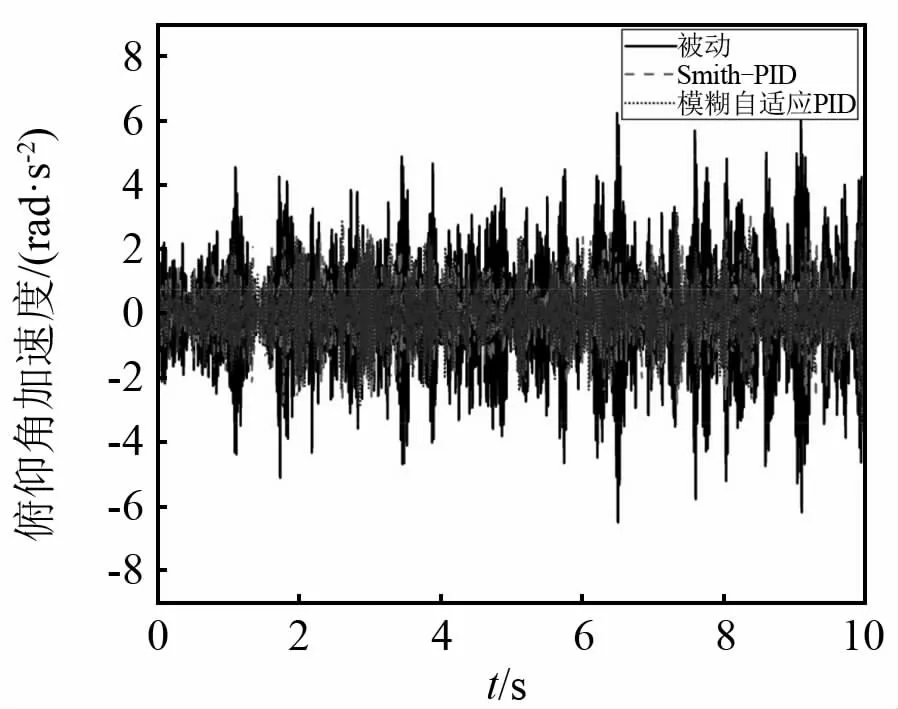
图10 俯仰角加速度对比Fig.10 Comparison of pitch acceleration
具体各速度下的驾驶室性能表现如表4、表5和表6所示。Smith-PID控制器的优化效果对于垂向方向振动抑制不明显,但对于驾驶室的侧倾和俯仰角加速度响应有表现出较好的优化效果。而模糊自适应PID控制器对于整个驾驶室三向振动均有十分显著的优化效果,对垂向加速度和侧倾、俯仰角加速度均有较大的抑制,其在驾驶室质心处垂向加速度均方根值平均降低15.9%,侧倾角加速度均方根值和俯仰角加速度均方根值平均降低了25.1%和58.1%,控制效果优于被动和Smith-PID控制器的悬置系统。
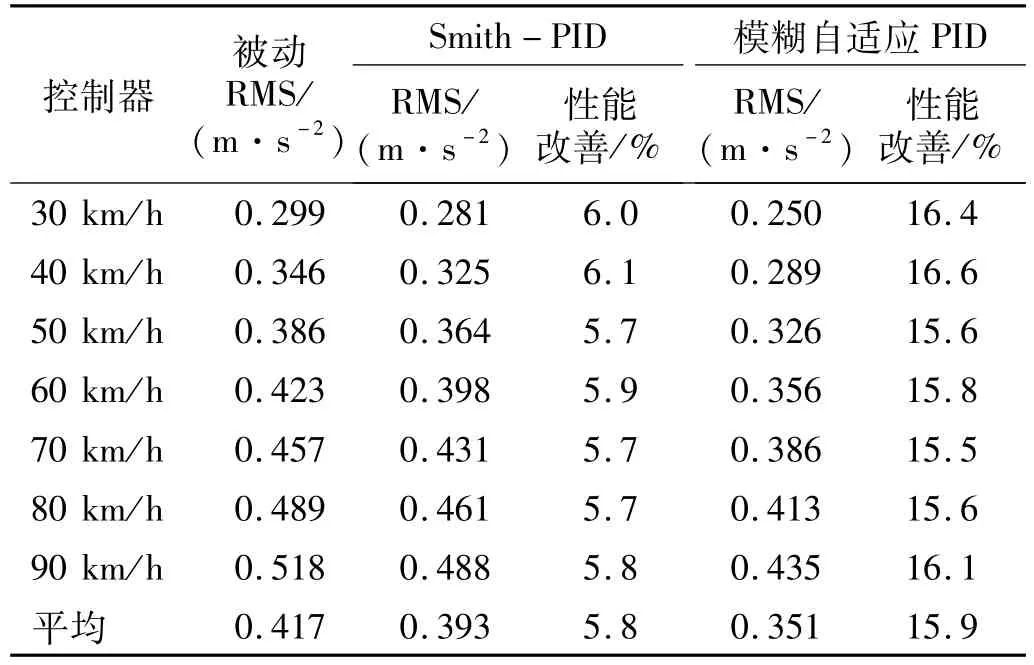
表4 驾驶室垂向加速度均方根值Tab.4 RMS value of cab vertical acceleration
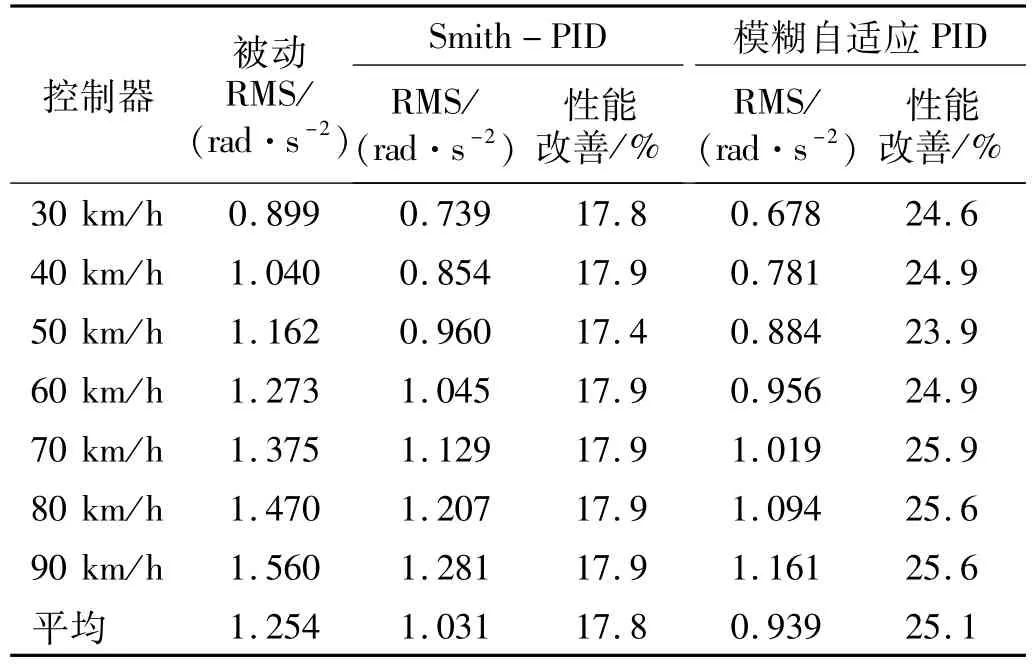
表5 驾驶室侧倾角加速度均方根值Tab.5 RMS value of cab roll angle acceleration

表6 驾驶室俯仰角加速度均方根值Tab.6 RMS value of cab pitch angular acceleration
4 试 验
为了进一步探究本文设计的半主动悬置的有效性,笔者根据GB/T 4970—2009《汽车平顺性试验方法》中的商用车平顺性试验方法对某型号重型商用车驾驶室悬置系统进行了路面试验。试验所需的设备有LMS数据采集仪与后处理软件、8个单向加速度传感器、3个三向加速度传感器以及线束若干。设备安装如图11、图12所示。

图11 前、后悬置安装位置Fig.11 Front and rear suspension positions

图12 驾驶室内安装位置Fig.12 Installation position in the cab
根据要求设置试验参数,测试驾驶室在40 km/h,50 km/h,60 km/h,70 km/h时3个方向的加速度均方根值,并使用1/3倍频程的导出数据计算总加权加速度均方根值,结果如表7所示。以60 km/h为例,被动与半主动驾驶室悬置系统试验数据的脚部地板处PSD曲线对比如图13所示,PSD曲线峰值对比如表8所示。

表7 驾驶室总加权加速度均方根值Tab.7 RMS value of cab total weighted acceleration
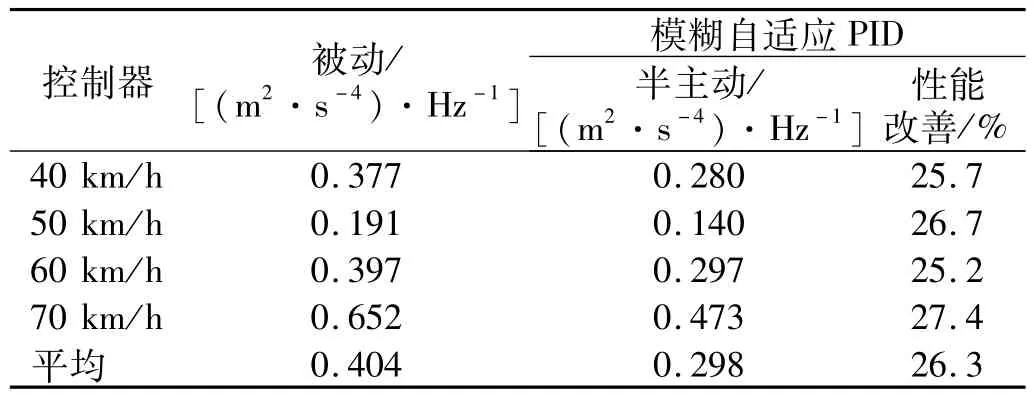
表8 驾驶室脚部地板处PSD曲线峰值Tab.8 Peak value of PSD curve at the foot floor of the cab

图13 PSD曲线对比Fig.13 PSD curve comparison
根据试验数据,采用模糊自适应PID控制器的半主动悬置系统可以有效的降低驾驶室座椅处的加速度响应。驾驶室总加权加速度均方根在40~70 km/h内模糊自适应PID控制器的半主动悬置相对于被动悬置平均降低了25.6%,脚部地板处PSD曲线的峰值平均降低了26.3%。
5 结 论
(1)基于某款重型商用车的驾驶室,将系统简化为轮胎—主悬架—驾驶室悬置十自由度振动模型。该模型相比于驾驶室悬置单独模型综合考虑轮胎、悬架对悬置系统的影响,可更为精确的研究控制系统。建立了基于状态方程以及输出方程形式的动力学方程,以优化驾驶室质心处垂向、侧倾和俯仰加速度响应为目标,探寻不同控制方法的优劣。
(2)考虑到系统的滞后特性,使用Smith-PID控制器加入重型商用车悬置系统中改进为半主动悬置。为解决PID控制器参数一旦整定就无法修改的问题,使用模糊控制对PID参数进行实时调节。仿真结果表明,采用Smith-PID控制器和模糊自适应PID控制器的半主动驾驶室悬置均能显著抑制驾驶室质心处垂向、侧倾和俯仰加速度响应,可以有效提高驾驶员的乘坐舒适性。
(3)两种算法相比而言,模糊自适应PID比Smith-PID表现更好。其在控制驾驶室振动响应方面更优越、控制力曲线更平滑、PSD曲线峰值抑制效果更好。以上结论均在路面试验得到了验证,证实了仿真的正确性。
