浮式风机半潜式平台动力响应研究
2021-09-25张洪建许波峰
张洪建,蔡 新,3,许波峰
(1.河海大学 力学与材料学院,江苏 南京 211100;2.江苏省风电机组结构工程研究中心,江苏 南京210098;3.沿海开发与保护协同创新中心,江苏 南京 210098;4.河海大学 能源与电气学院,江苏 南京211100)
0 引言
海上风能近年来逐渐受到世界各国的重视。浮式风机与传统固定式风机相比,安装成本低,成为开发深海风能的首选形式。半潜式风机因其建造成本低、抗风浪能力强等优点,成为了我国浮式风机的主要发展方向。
Yang Yang[1]讨论了一种新型多体浮式平台在有无风浪耦合作用下的运动差异与疲劳载荷。黄致谦[2]设计了一种新型浮式风机半潜平台,该平台基于流体力学软件(AQWA),并结合有限元方法进行数值仿真。范增辉[3]研究了风浪半潜式平台关键部位弯矩的影响,研究表明,相比于塔根底部,横撑处更易发生破坏。半潜式平台吃水较浅,平台重心较高,主要通过系泊系统维持稳定。
本文在OC4-DeepCwind半潜式风机的基础上,设计了一种具有倾斜立柱的半潜式平台。基于势流理论,本文探究半潜式风机在实际海洋环境中的运动特性,并对半潜式平台结构及系泊系统参数进行了分析优化。
1 风机模型的建立
基于ANSYS建立数值模型,利用AQWA对导入的风机模型进行水动力分析,从而对半潜式浮式风机的动力响应进行数值模拟。
1.1 风力机参数
风机主体采用NREL 5 MW风力机,参数见表1。浮式平台选用OC4-DeepCwind平台(以下简称原平台),相关参数见表2[4]。本文设计的一种具有倾斜侧柱的新型平台(简称新平台)参数见表3。
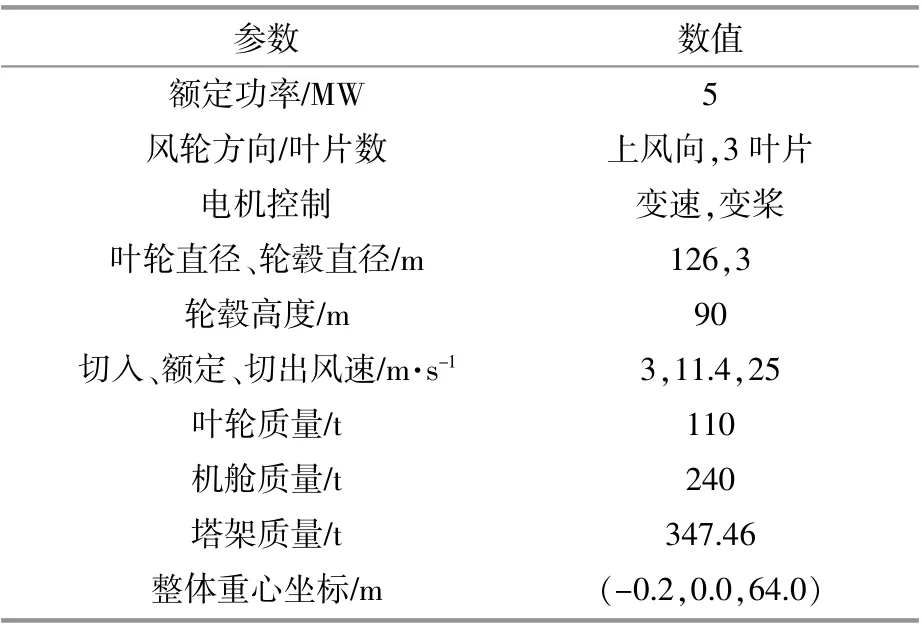
表1 NREL 5 MW风力机参数Table 1 Parameters of NREL 5 MW wind turbine
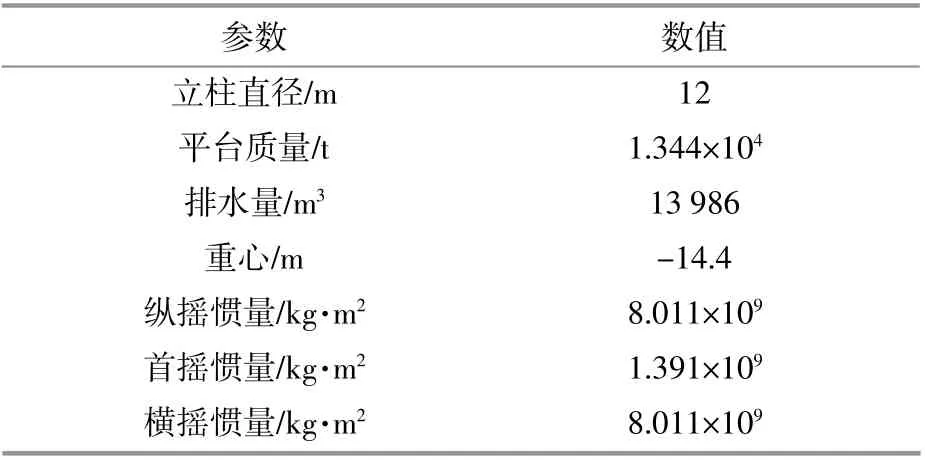
续表2
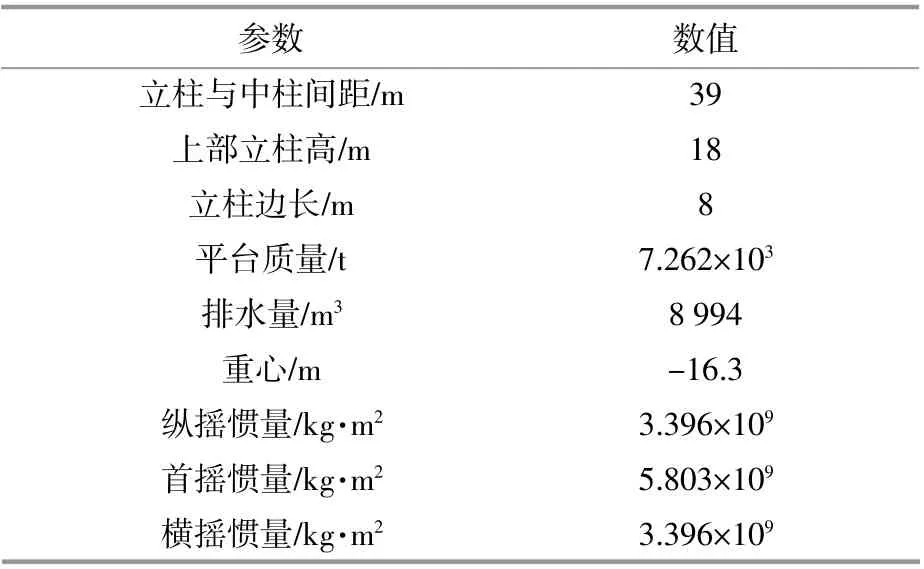
表3 新平台参数Table 3 Parameters of new platform
1.2 浮式平台设计
提高浮式平台稳定性常用的方法为增大平台质量、立柱间距和水线面积[5]。增大质量会造成制造与安装成本的增加,直接增加立柱间距将增大支撑部件应力与疲劳载荷,增大水线面积会导致平台垂荡周期减小[5]。本文设计的新平台每个立柱上部直立、下部向外倾斜,使新平台惯性矩明显提高,同时支撑构件载荷不会过大。新平台立柱底部将原平台的附加质量块简化为相同半径的垂荡板,大幅降低制造成本,使平台质量降低了47%,排水体积下降了35.7%。为验证新平台的可行性及合理性,将新平台与原平台进行对比分析。将塔顶上部结构简化为集中质量,两平台模型如图1所示。
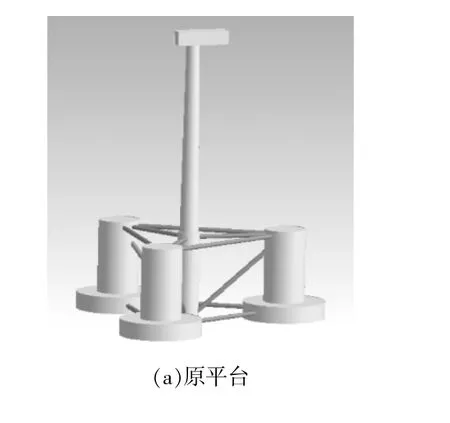

图1 浮式风机模型Fig.1 Model of floating wind turbine
2 环境载荷
浮式风机在海洋环境中会受到多种载荷作用,为简化计算,本文主要考虑风、浪、流3种载荷。
2.1 风载荷
自然界中,湍流风的风速和风向随时间不断变化。浮式风机所受的风载荷F为[6]

式中:S为结构的投影面积;Ch,CS分别为高度和形状系数,取值分别为1.2和0.5[6];P为风压。

式中:v为风速。
2.2 波浪载荷
本文研究对象为半潜式平台,属于大尺度结构物,其对波浪的影响不可忽略。因此,本文采用势流理论以求解波浪载荷方程[7]。在势流理论中,结构物周围流场总的速度势为

式中:ϕI为入射波速度势;ϕD为绕射波速度势;ϕR为辐射波速度势。

式中:g为重力加速度;A为波浪幅值;ω为波浪频率;θ为浪向角;k为波数;e为常数。
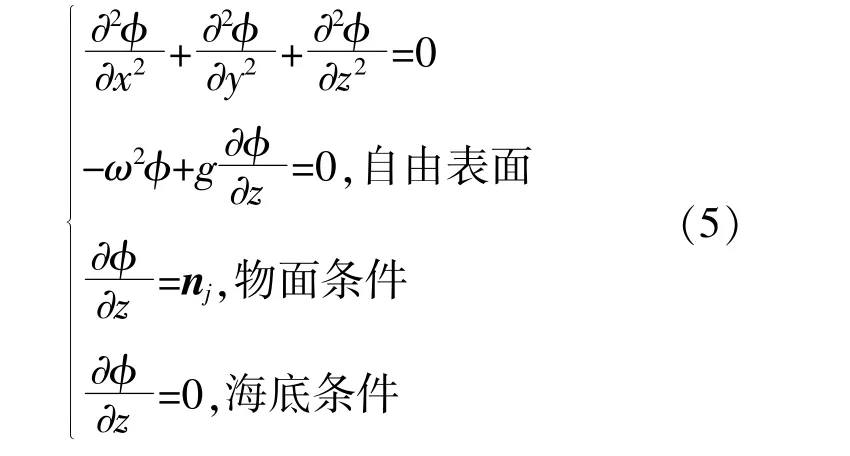
各个速度势须满足Laplace方程和边界条件。式 中:nj为 物 面 外 法 向 单 位 矢 量,j=1,2,3,4,5,6。
基于上述过程得出了各速度势和总速度势,通过Bernoulli方程,求出物体表面的压力,再沿浮体湿表面积分可求出作用在结构物上的波浪力与力矩。
2.3 流载荷
本文设计水深为200 m,流载荷f为

式中:CD和 ρ分别为拖曳力系数和海水密度,文中CD取值为1;A为结构沿海流方向的投影面积;v为相对流速。
2.4 工况选择
结构最不利的条件即为风、波和流载荷沿x轴同向施加在平台上。本文选择北太平洋实测海况作为研究工况,其环境参数见表4。
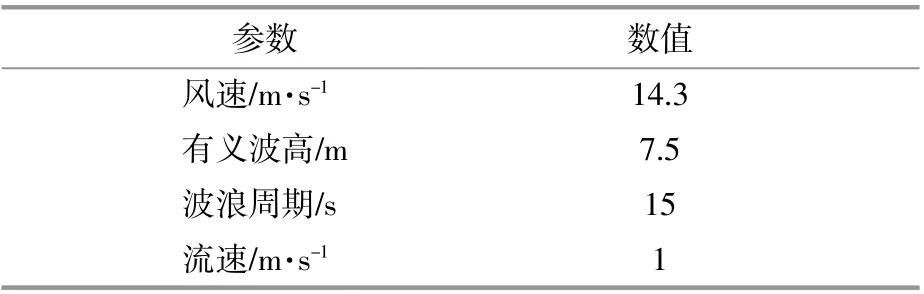
表4 环境参数Table 4 Environment parameters
2.5 计算结果验证
为验证本文模拟结果的可靠性,将本文谱密度的计算结果与文献[8]中的试验数据和FAST数值模拟结果进行对比。图2为本文谱密度的计算结果与试验结果和FAST模拟结果的对比曲线图。由图2可知:本文与文献[8]中3个自由度的谱密度变化趋势基本相同;相较于FAST模拟结果,纵荡与垂荡的谱密度更加接近试验值。但由于试验尺度效应以及FAST有很多线性化假设,谱密度的具体数值仍然存在差异。根据上述验证,认为本研究计算结果具备可靠性。
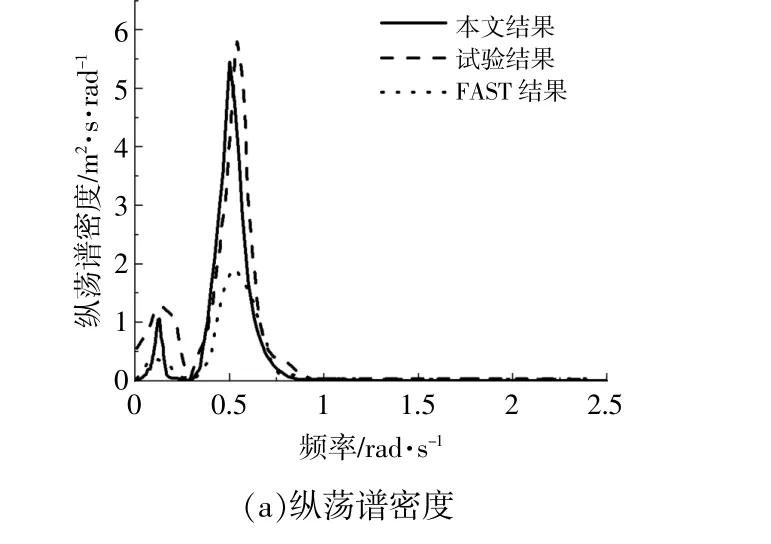
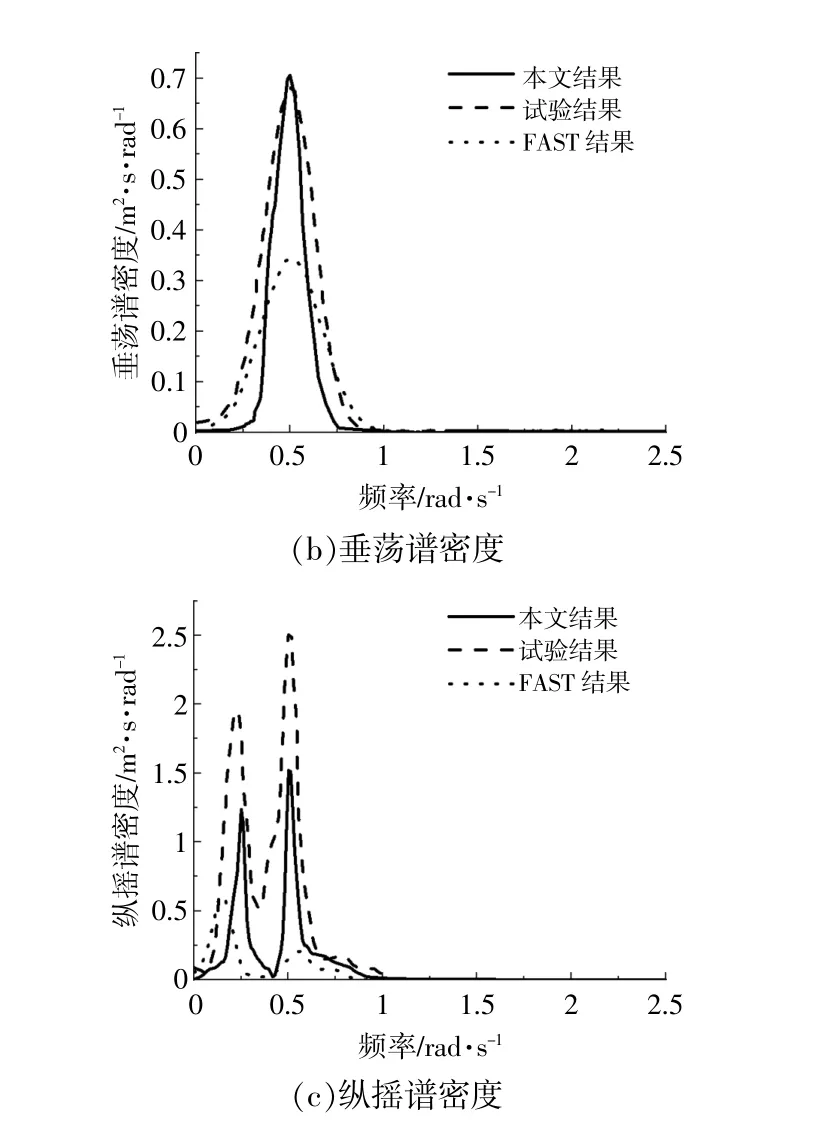
图2 谱密度计算结果比较Fig.2 Comparison of PSD calculation results
3 频域与时域分析
3.1 频域分析
平台纵荡、垂荡及纵摇对浮式风机的稳定性与安全性的影响相对更大。故本文主要从这3个自由度对平台运动进行分析以及优化。图3为新平台与原平台的3个自由度的RAO变化趋势。
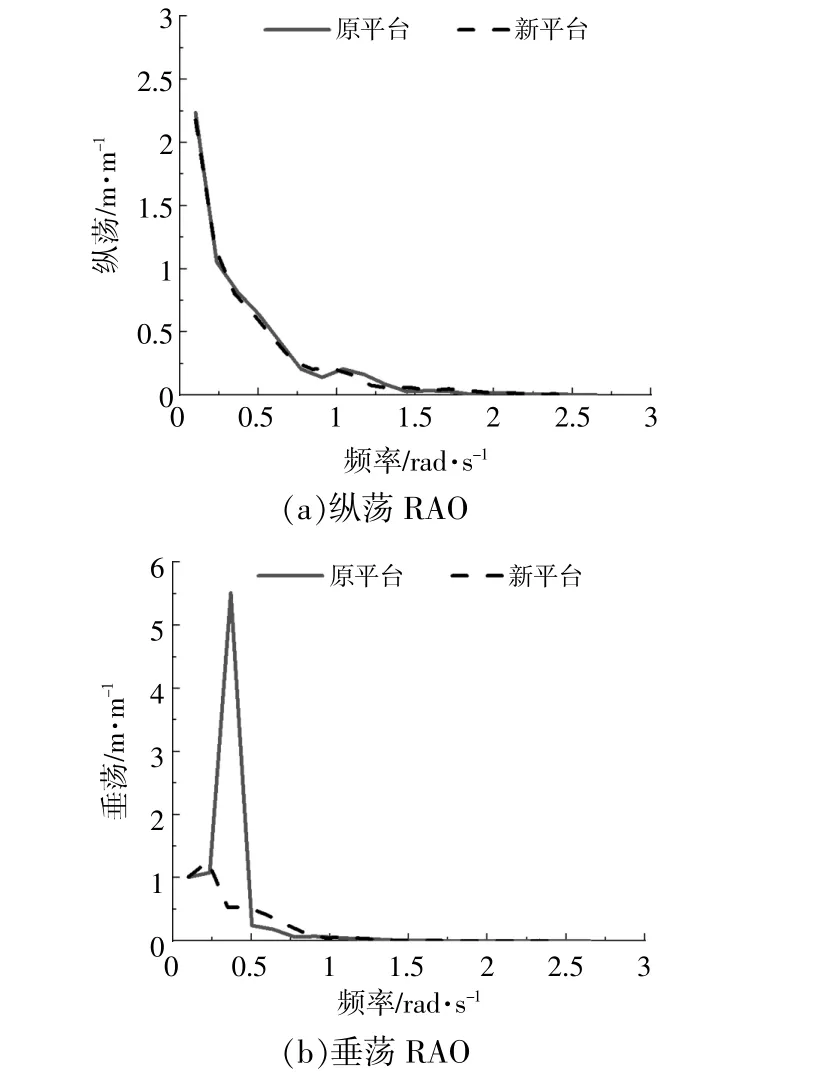
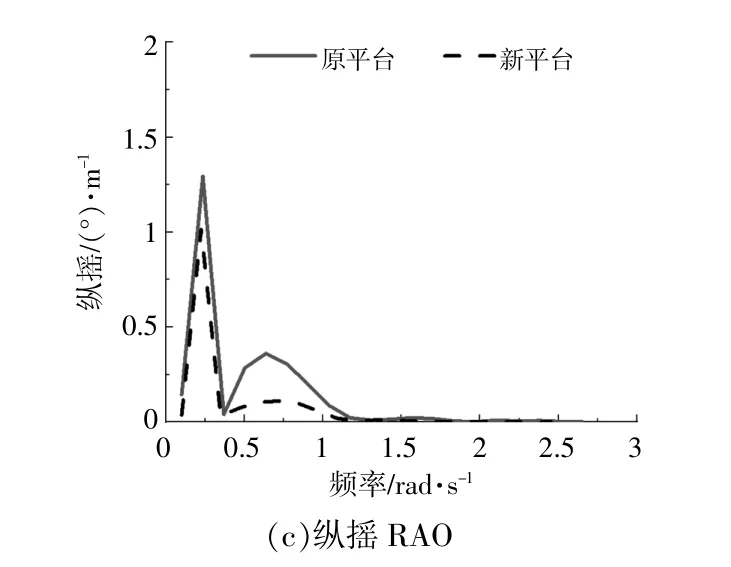
图3 新平台与原平台RAO比较Fig.3 Comparison between the new platform and the original platform RAO
由图3可知:纵荡RAO随频率的增加而减小;垂荡RAO随频率先增加后减小,最后趋于0;新平台各自由度运动响应均有降低,纵荡峰值减少了2.5%,垂荡峰值降低了77.2%,纵摇峰值减少了18.3%。
为防止结构与波浪发生共振,平台固有周期应远离一般波浪周期[9]。一般波浪周期集中在1~30 s内,而对应的能量峰值周期为10 s左右,其波浪谱密度如图4所示。
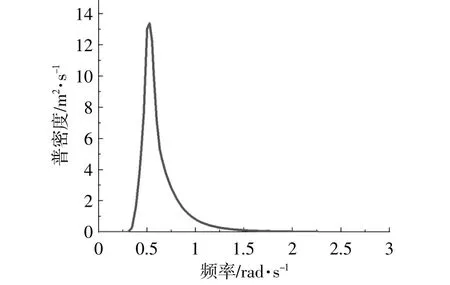
图4 波浪谱密度Fig.4 Wave spectra density
原平台和新平台垂荡固有周期分别为16.9 s与27.8 s。新平台垂荡固有周期远大于原平台,可以更有效地预防结构共振的发生。
将波频处两种平台载荷分布云图进行比较(图5)。
由图5可知:两种平台接近水面处载荷相对较大,说明波浪载荷对浮式平台造成很大影响;新平台最大载荷为44.5 kN/m2,原平台最大载荷为63.2 kN/m2,新平台缩小立柱横截面积明显降低环境载荷对平台的影响;新平台最大载荷仅在单根立柱处分布,而原平台立柱与中柱均有最大载荷分布,这是由于原平台各个立柱之间距离较近,相互间水动力影响较强。
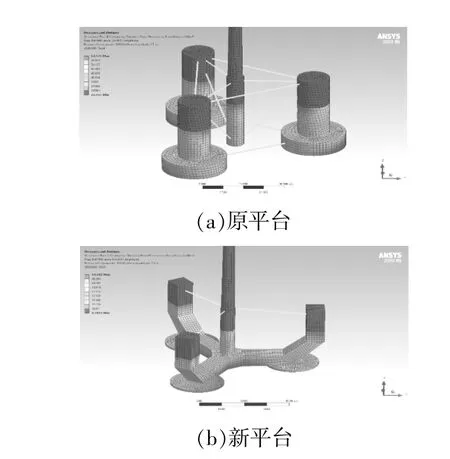
图5 两种平台载荷分布Fig.5 Load distribution of two platforms
3.2 时域分析
本节重点研究纵荡、垂荡与纵摇运动响应,设定时间为1 000 s,风、浪、流载荷均沿x轴作用于风机。图6为两种浮式平台运动响应时域曲线。
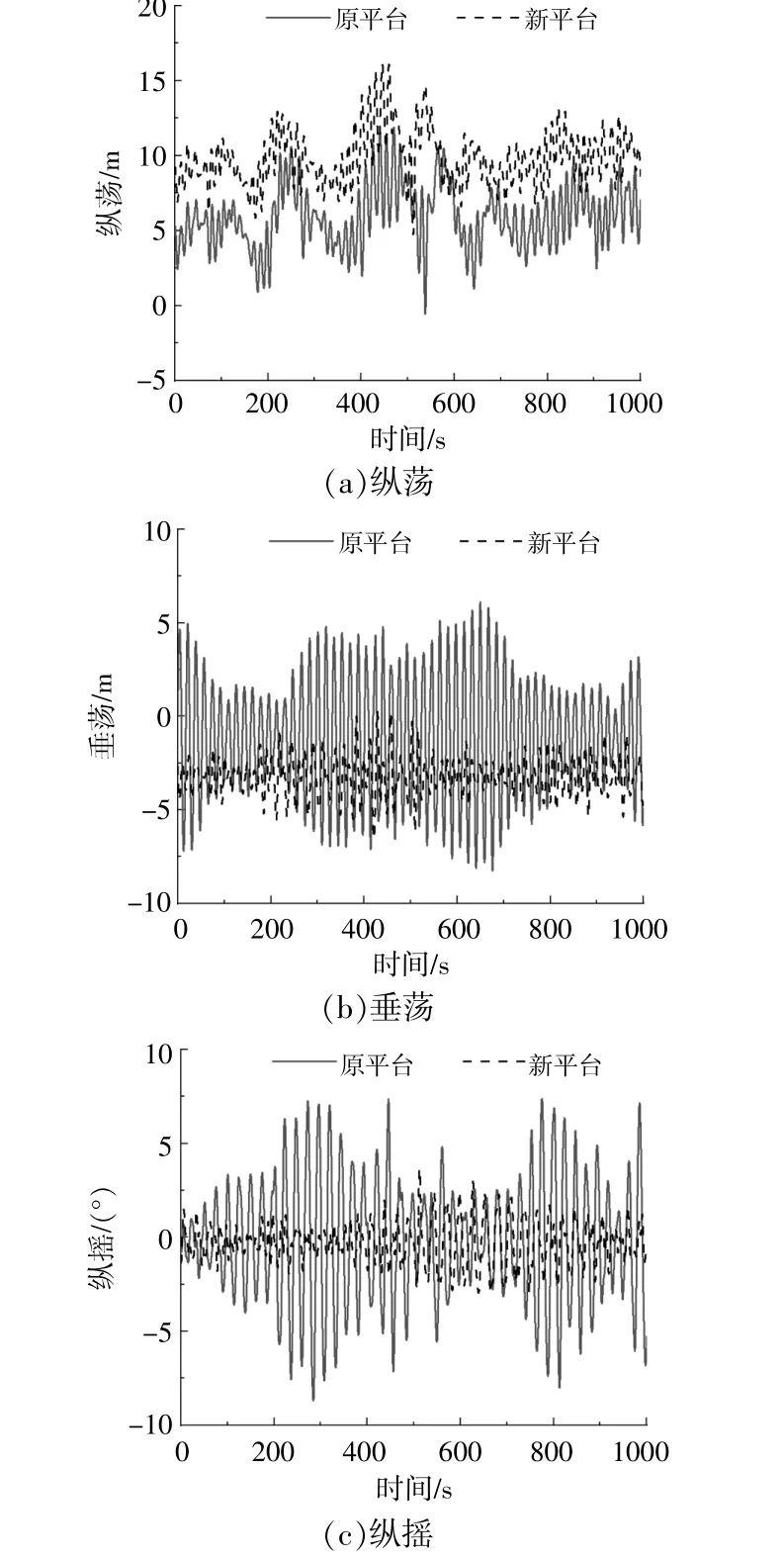
图6 平台时域运动响应Fig.6 Time domain of platform motion response
表5为两种浮式平台运动响应幅值与平均值。
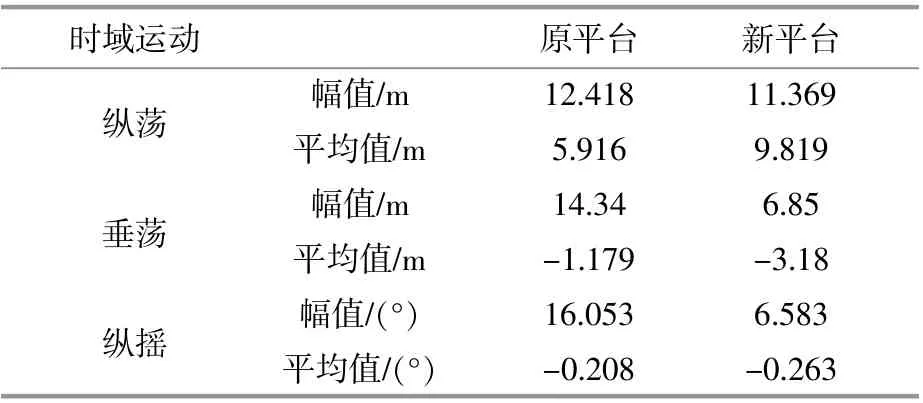
表5 平台时域运动响应Table 5 Time domain of platform response
根据图6与表5可知,新平台纵荡、垂荡与纵摇幅值较原平台分别降低了8.44%,52.23%和59%,垂荡与纵摇运动响应大幅下降。垂荡运动响应减小使新平台避免过多竖向运动而造成的疲劳损伤;纵摇运动响应降低减少平台多余的俯仰运动,保证了风机的发电效率。
4 系泊系统优化
由前文可知,新平台纵荡略大于原平台,纵荡过大会导致电缆受到较大载荷而断裂。因此,须要对新平台系泊系统进行优化。缆索数量、导缆孔高度和锚点坐标对浮式风机运动响应具有显著影响。原系泊系统参数见表6。
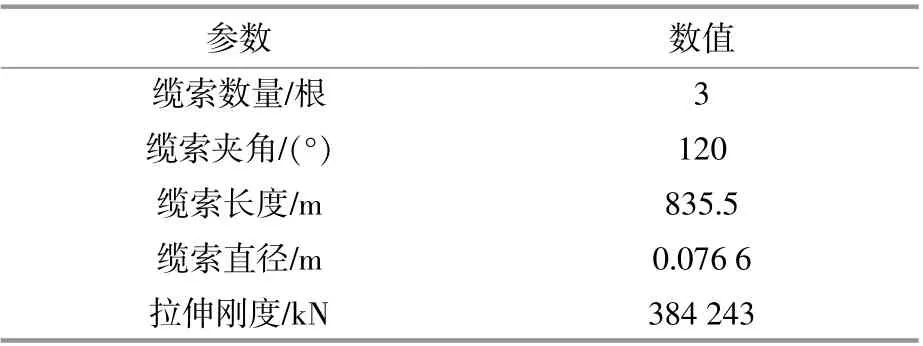
表6 原系泊系统参数Table 6 Mooring system parameters
4.1 缆索数量优化
设置3组缆索布置形式进行对照,分别为3根缆索、6根缆索(3组,组间缆索夹角为30°)以及9根缆索(3组,组间缆索夹角为15°),具体布置形式如图7所示。
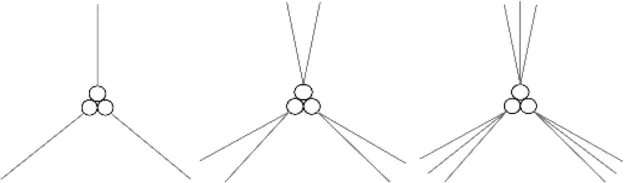
图7 不同缆索数量布置形式Fig.7 Forms of different cable quantities
图8为不同缆索数量的新型浮式风机运动响应时域曲线,表7为不同缆索数量的新型浮式风机运动响应统计。
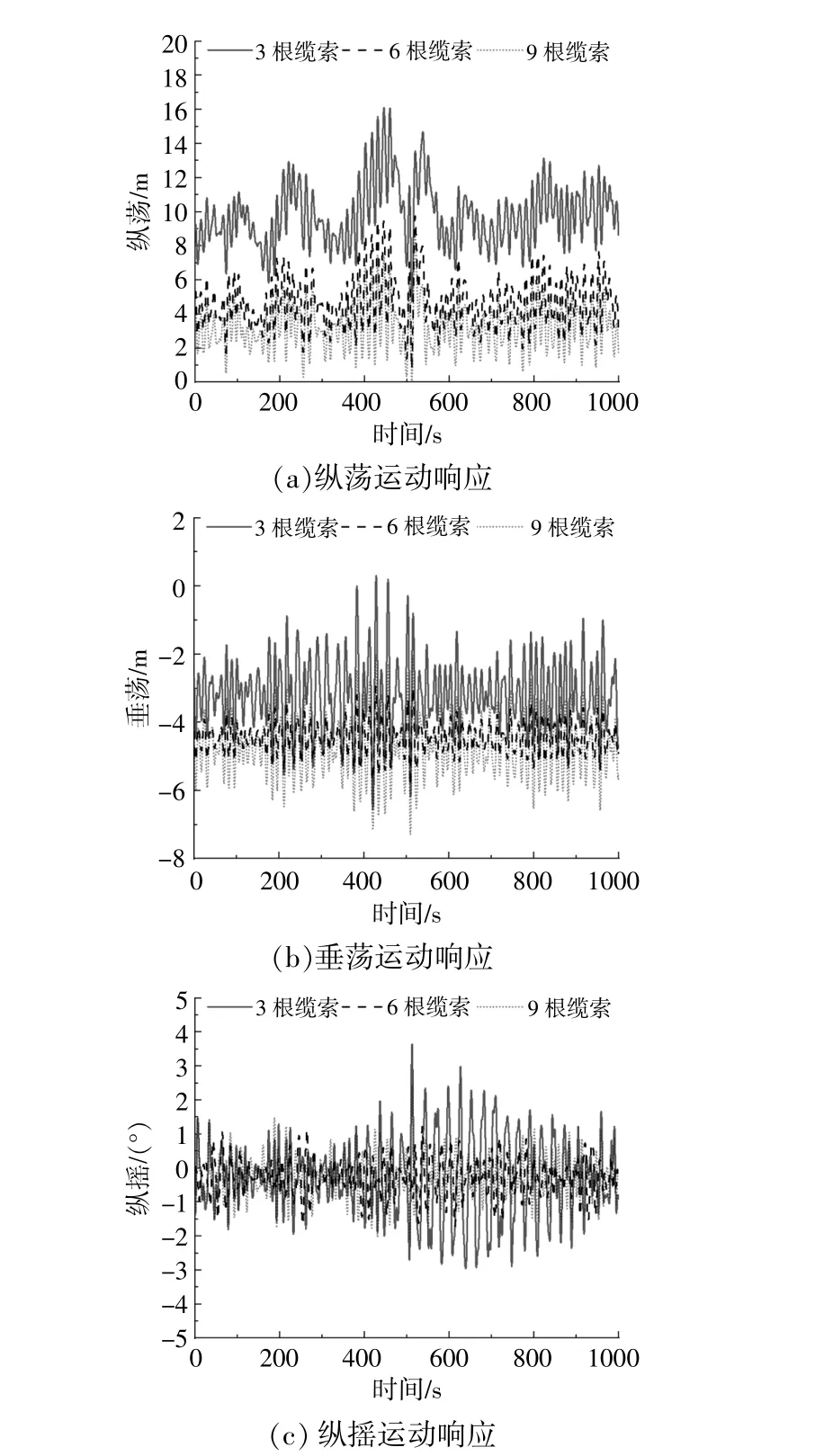
图8 不同缆索数量时域运动响应Fig.8 Time-domain motion response of different cable quantities
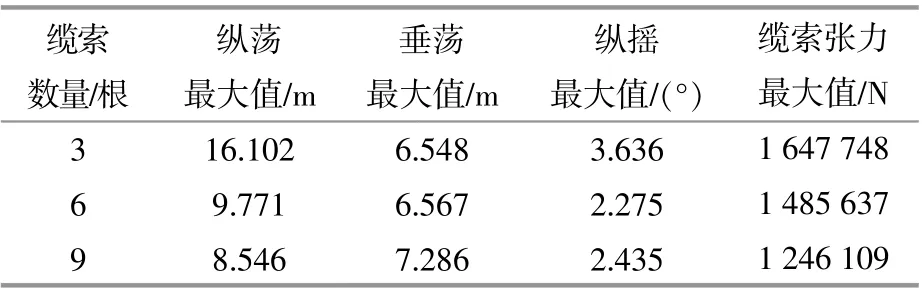
表7 不同缆索数量计算结果Table 7 Calculation results of different cable quantities
由图8和表7可知:6根缆索相较于3根缆索的纵荡、垂荡、纵摇以及最大缆索张力分别下降了39.5%,10.8%,66.5%和4.14%;9根缆索明显降低缆索张力,但相比于6根缆索纵荡优化并不明显,且垂荡与纵摇最大值反而增加。考虑到实际工程中安全性及经济性要求,选择在系泊系统中设置6根缆索。
4.2 导缆孔高度优化
利用响应面算法对导缆孔高度进行参数优化,优化结果与原系泊系统对比结果见表8。
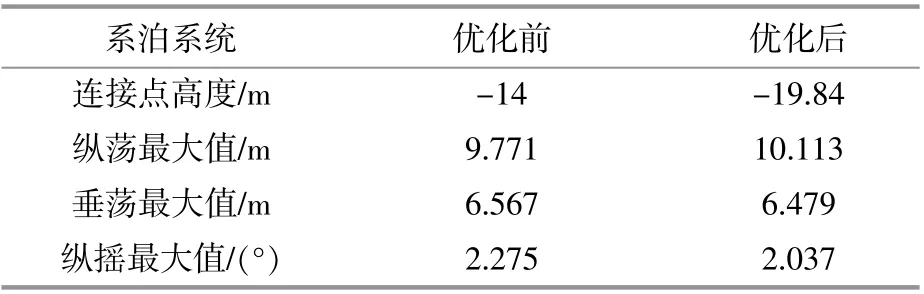
表8 不同连接点高度计算结果Table 8 Calculation results of height of different connection points
由表8可知:导缆孔高度优化后的系泊系统的垂荡、纵摇和缆索张力最大值分别降低了1.3%,10.5%和5.7%,而纵荡最大值小幅增加;导缆孔高度对纵摇的影响最为明显,对纵荡、垂荡以及缆索张力影响较小。
4.3 锚点位置优化
基于响应面算法对锚点坐标进行参数优化,优化前后的锚点坐标见表9。同时,将优化后的结果与原系泊系统进行比较(表10)。
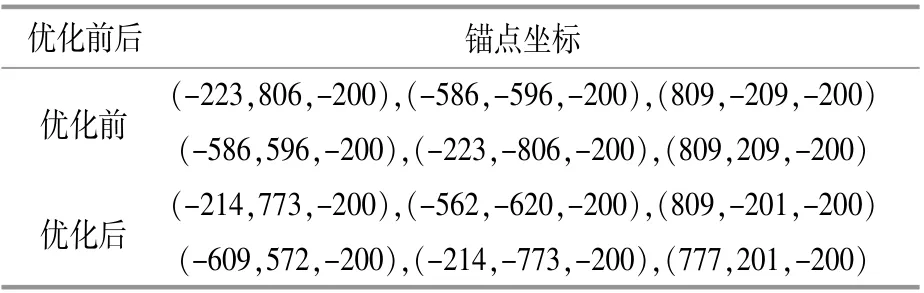
表9 优化前后锚点坐标Table 9 Coordinate of fixed points before and after optimization

表10 不同锚点位置计算结果Table 10 Calculation results of different fixed points
由表10可知,锚点坐标优化后纵荡、垂荡与缆索张力最大值分别下降了27.9%,4.6%和13.8%,而纵摇最大值小幅增加。缆索锚点坐标主要影响纵荡以及缆索张力。
4.4 系泊系统优化
根据上述得到的最优缆索数量、最优导缆孔高度与最优锚点坐标,提出一种优化的系泊系统,新平台模型如图9所示。
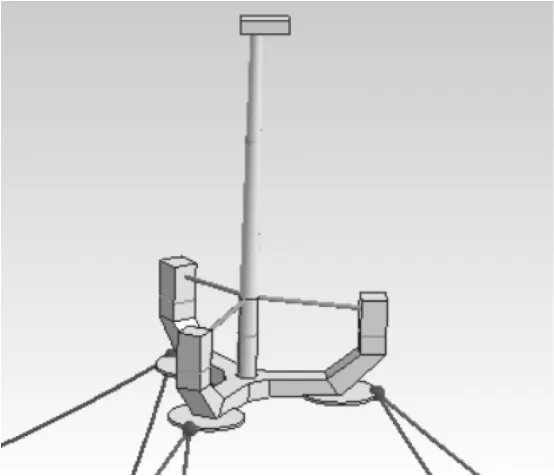
图9 系泊系统优化后的新平台模型Fig.9 New platform model after mooring system optimization
优化系泊系统后的新平台与未优化系泊系统的原平台的对比结果见表11。由表11可知,系泊系统优化后的新平台与原平台相比,纵荡、垂荡、纵摇最大值以及缆索张力最大值分别下降了48.7%,5.5%,38.3%和26.2%。采用优化系泊系统的新平台的运动响应和最大缆索张力均有明显改善。
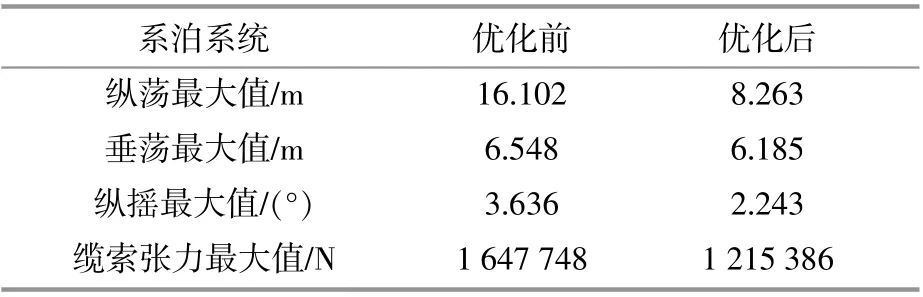
表11 系泊系统优化后的新平台计算结果Table 11 Calculation results of new platform after mooring system optimization
5 结论
本文在OC4-DeepCwind平台基础上,设计一种具有倾斜立柱的新型浮式风机半潜式平台,并进行了可靠性验证。基于势流理论,对两种平台进行了频域与时域分析,对其系泊系统进行了优化,得到以下结论。
①新平台纵荡、垂荡以及纵摇RAO峰值与原平台相比均有下降,分别降低了2.5%,77.2%和18.3%,新平台具有更好的防垂荡与抗倾覆能力。新平台的垂荡固有周期增大了64.5%,能够更大程度防止共振发生。新平台波频处的最大表面压力降低了29.6%,明显降低了波浪载荷对平台的影响。
②新平台纵荡、垂荡与纵摇幅值分别降低了8.44%,52.23%和59%,运动响应均较原平台更加稳定。新平台也保证了在极端工况下良好的稳定性。
③分别对缆索数量、导缆孔高度与锚点位置进行优化,可以得知导缆孔高度主要影响平台纵摇,锚点位置主要控制平台纵荡与系泊张力,6根缆索更能兼顾安全性与经济性。优化系泊系统后的新平台,其运动响应与缆索张力明显降低,纵荡、垂荡、纵摇最大值以及缆索张力最大值分别下降 了48.7%,5.5%,38.3%和26.2%。
