车用燃料电池空压机叶轮多工况气动优化设计
2021-09-10肖军王艺达刘小民陈玉辉张治平
肖军,王艺达,刘小民,陈玉辉,张治平
(1.合肥通用机械研究院有限公司压缩机技术国家重点实验室,230031,合肥;2.西安交通大学能源与动力工程学院,710049,西安;3.珠海格力电器股份有限公司,519070,广东珠海)
燃料电池汽车是21世纪新能源汽车最具战略意义的突破口,车用燃料电池是离心压缩机应用的新领域。燃料电池离心空压机普遍具有超高转速小流量的特点,转速往往在数万转/分甚至10万转/分以上,其性能曲线十分陡峭,且动态变载的工况条件使压缩机性能剧烈变化。燃料电池离心空压机的优化设计对离心空压机和燃料电池系统的匹配十分重要,针对超高转速小流量的燃料电池离心空压机展开气动设计及其优化是值得关注的重要问题,对其展开深入研究具有重要的工程应用价值。
有关离心叶轮的优化设计已开展较多[1-10],但针对燃料电池空压机叶轮的优化设计开展较少,万玉以65 kW燃料电池系统的离心空压机为对象,探讨了叶轮参数化模型对其气动性能的影响,采用Kigring近似模型对离心空压机进行了多工况优化设计[11-12]。另一方面,国内外学者对叶轮型线气动优化的研究一般以等熵效率和压比为目标,而对于燃料电池系统,空压机过高的压比往往会造成燃料电池系统的寄生功率过大,少有以压比为约束条件的优化设计。此外,燃料电池空压机实际产品多采用两级结构,与此相应的叶轮优化设计尚未见开展。
由于流场的仿真计算耗时,通过采用代理模型,以近似计算代替流体仿真计算可极大程度降低寻优过程的计算时间。常用的近似模型包括响应面模型、BP神经网络模型、支持向量机回归模型、Kriging模型等[13-16]。响应面模型和Kriging模型对高维强非线性函数的拟合精度较差,支持向量回归机只适于单目标问题,且自由参数较多,而径向基函数神经网络模型具有最佳逼近、收敛速度快和克服局部极值的优良性能,且自由参数少[17]。
为权衡燃料电池系统在不同工况下的性能,有必要对空压机多个工况同时寻优,而目前常规的多目标优化设计方法,包括遗传算法、粒子群优化算法、模拟退火算法、蚁群算法等,普遍存在计算收敛慢、容易陷入局部最优的问题[18-21]。为此,有必要开展高效鲁棒且寻优性能优良的燃料电池离心空压机多工况优化设计方法研究。
基于上述问题,本文针对燃料电池空压机叶轮的气动优化,提出了多目标多工况带约束的优化设计方法,自主开发叶轮流场分析程序和优化设计程序,形成了从叶型参数化、流场计算、建立代理模型到智能寻优的完整优化设计链条。针对某两级燃料电池离心空压机叶轮,采用自主开发的程序,综合考虑设计及非设计工况点的需求,以效率为目标、压比为约束,对空压机叶轮展开了多工况气动优化设计,使空压机性能更符合车用条件下燃料电池动力系统的使用需求。
1 流场计算方法
基于多块结构化网格编制了有限体积流场分析程序,主方程和湍流方程的离散方法、多块网格间的数据交换具体可见文献[22-23]。考虑到目前PC机和工作站已普遍使用多核多线程处理器,程序引入OPENMP共享内存并行编译技术,通过向程序中添加少量伪代码实现了单机多线程并行计算,显著减少了流场计算的时间成本。
进口边界给定总温、总压及来流湍流度,边界内点轴向速度外插;出口边界给定平均静压或流量,速度分量采用一维特征关系外插。对于径向扩压器,当背压较大时,出口边界可能出现局部倒流区域,此时使用下式设置出口倒流区域的总温
(1)

2 叶轮优化设计方法
2.1 叶型参数化及抽样策略
一般情况下,叶片型线及子午型线由几十个或更多数目的型线点坐标给出,直接对型线点进行优化必然导致工作量过大,因而必须对初始型线进行拟合及参数化处理。本文采用具有保凸性和光滑性的Bezier曲线来描述叶轮子午型线,将优化变量空间缩小到由有限的Bezier曲线控制点张成的子空间,大大减少了设计变量的数目。
一条n阶Bezier曲线定义为
(2)
叶表型线采用3阶Bezier曲线拟合,子午型线采用4阶Bezier曲线拟合,如图1所示。机匣和轮毂子午型线的控制点各5个,叶顶和叶根表面型线的控制点各4个。优化设计时子午及叶表型线两端控制点固定,子午型线的第2、第4控制点只在直线上移动,第3控制点可在子午平面自由移动,叶表型线的第2、第3控制点只在直线上移动。按此设置,子午型线自由设计参数8个,叶表型线自由设计参数4个。设计参数的变化范围应考虑叶轮气动性能变化及几何造型对力学性能带来的影响,变化范围过小使寻优空间小、气动性能在原始值附近变化不大,变化范围过大使叶片过度扭曲,显著降低气动性能和结构可靠性。具体可通过单参数改变试算气动性能数据,确定其变化范围。
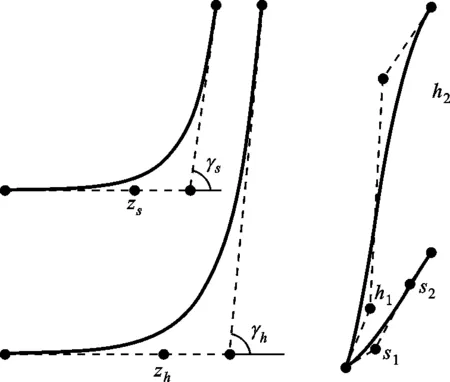
(a)子午型线(b)叶表m-t型线图1 叶轮型线控制点Fig.1 Control points of impeller profile
抽样策略应使得样本能够尽量覆盖整个寻优空间,本文采用拉丁超立方抽样[24]进行设计样本空间的生成。拉丁超立方抽样是一种分层随机抽样,将N维设计空间的每个因素分为M个概率相同的区间,从各区间随机选择一个值,每个因素的M个值和其他变量的值进行随机组合,总共抽取M个样本。该方法能够保证每一个变量范围的全覆盖,做到以较小的采样规模获得较高的采样精度。
2.2 径向基函数神经网络
离心叶轮的气动优化在寻优过程中需计算不同设计变量组合对应样本的气动性能,而通过CFD仿真进行流场计算的时间成本极高,为此需使用代理模型来近似流场仿真结果。本研究采用径向基函数(RBF)神经网络[17]建立代理模型,RBF神经网络能以任意精度逼近任意连续的非线性函数。
RBF神经网络的输出为
(3)

(4)
式中η为学习率。
2.3 多目标灰狼优化算法
灰狼算法中,按类似于灰狼的等级制度将每代群体分为α、β、δ、ω共4组,前3组代表适应度最好的3组,其余个体被划分到ω组,ω组根据前3组的信息向着目标搜索。当前最优的3个解记为α狼、β狼和δ狼,其他个体通过3只头狼的引导来围捕猎物[25]。算法过程如下
(5)
X(t+1)=(Xα(t)-A1·Dα+Xβ(t)-
A2·Dβ+Xδ(t)-A3·Dδ)/3
(6)
A=2a·r1-a;C=2r2
(7)
式中:X代表灰狼的位置;a代表收敛因子,其值随迭代次数的增加由2下降到0;r1和r2每一维均为[0,1]上的随机数。
为将灰狼算法应用于多目标优化问题,在灰狼算法中引入外部种群,用于存储非支配最优解[26]。采用领导者选择策略,从外部种群中选择捕食过程中的领导者α狼、β狼及δ狼,具体实现如图2所示。更新外部种群时,若外部种群已满,则在最拥挤组中删除个体,然后向不拥挤组中添加,若任一新添加的个体落在外部种群的超立方之外,则更新外部种群分组网格以包括该个体。
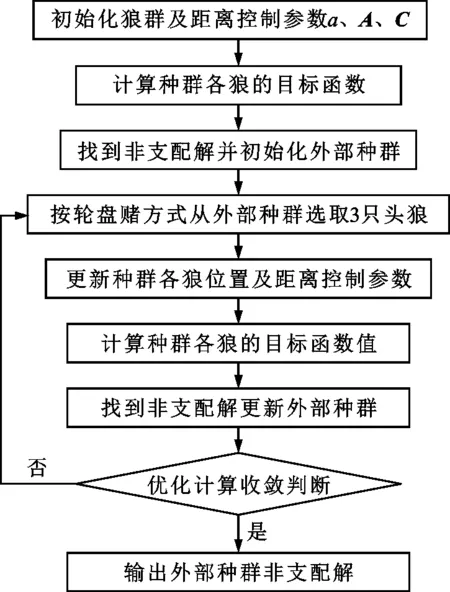
图2 多目标灰狼算法流程Fig.2 Flow chart of multi-objective grey wolf algorithm
2.4 多工况多目标优化设计
本文对设计工况和非设计工况同时进行寻优,优化目标包括等熵效率及压比,并对设计工况的压比作不等式约束。优化问题可描述为
(8)
式中:X为设计变量;ηis为等熵效率;εt为总压比;下标des和off表示设计工况和非设计工况;εd为给定设计压比。使用罚函数法将设计工况的约束优化问题转为如下的无约束优化问题
(9)
式中:φdes为目标函数;μ为惩罚系数。
离心空压机叶轮优化设计的具体流程如图3所示,优化结束后对最优解对应型线进行CFD流场计算,若目标性能与代理模型预测的结果差距较大,则将其加入样本集构建新的代理模型,进一步提高预测精度。

图3 离心空压机叶轮优化设计流程Fig.3 Optimal design of centrifugal air compressor impeller
3 优化结果及讨论
3.1 优化对象及其流场计算
以某两级燃料电池离心空压机为研究对象,开展优化设计工作。该空压机的样机结构如图4所示,为高速电机同轴直驱结构。根据设计方案,每级空压机叶轮均有8个主叶片和8个分流叶片,几何参数和设计工况性能如表1所示。

图4 两级燃料电池空压机结构示意图Fig.4 Structure diagram of the two-stage fuel-cell air compressor

表1 离心空压机样机几何及气动性能参数
压缩机两级采用相同的网格拓扑结构和参数设置。第一级叶轮及其计算网格如图5所示,计算域由14块H型网格拼接构成,网格点数为1 245 262。使用自主开发的流场分析程序(程序验证算例见文献[22-23])对空压机两级叶轮流场进行了建模和计算。计算设置对流项离散采用二阶迎风格式,湍流模型采用S-A模型,离开物面第一层网格满足y+≤5。

图5 空压机叶轮及计算网格(第一级)Fig.5 Aerodynamic profile and computational grid of air compressor (1st stage)
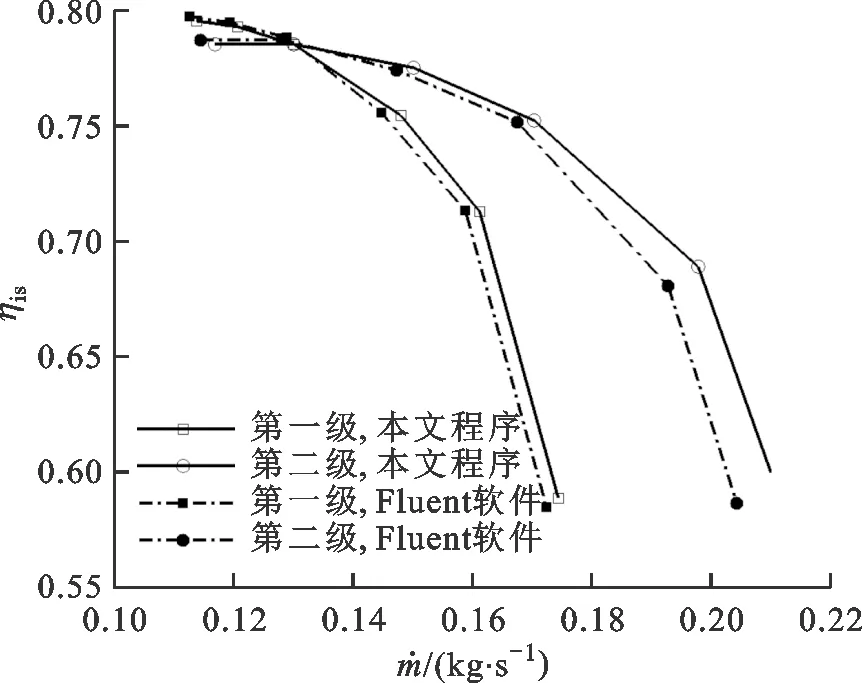
(a)等熵效率

(b)总压比图6 两级叶轮性能曲线对比Fig.6 Comparisons of performance curves
通过调节出口背压改变计算工况。根据设计参数,计算设定一级叶轮进口总温293.15 K、总压101.3 kPa,二级叶轮进口总温363.15 K、总压172 kPa。图6为计算得到的两级叶轮性能曲线对比,显见程序计算的效率和压比与主流商业软件的结果非常接近,按同样流量插值估算,两者计算的效率和压比最大误差均显著小于5%。在设计流量附近程序与软件结果的差异较小,在近堵塞工况时略偏大。数值计算的对比结果说明本文程序可用于进一步优化设计的气动性能计算。
3.2 优化设计过程分析
叶轮型线控制点的选取需要在拟合精度和数值计算成本间进行平衡。根据对叶轮流场的初步分析,叶轮出口斜流对提升压比不利,即子午型线出口倾角对气动性能有显著影响,应作为优化设计的关键设计变量,并考虑到在子午面内气体存在由轴向到径向的速度转向,曲率变化对流场影响较大,故选取机匣和轮毂子午型线第3与第5控制点构成直线的倾角γs和γh、第2控制点在第1与第3控制点构成直线的相对轴向位置zs和zh为设计变量,如图1a所示。对于叶顶和叶根表面型线,选取流向位置s1、s2、h1和h2为设计变量,如图1b所示,加上叶顶和叶根进口几何角β1s和β1h、叶片出口几何角β2,共7个设计变量,这样叶轮气动型线的设计变量为11个。根据单设计变量对气动性能影响的初步计算分析,使压比在设计值附近浮动±5%以内的水平,以确定设计变量空间的边界。对于第一级叶轮
(10)
对于第二级叶轮,β2∈[50,65],其他同上。
采用拉丁超立方抽样方法,建立叶轮型线设计变量的11因素50水平的样本空间。以第一级叶轮型线的50个样本为例,因素h1和h2形成的样本分布如图7a所示,因素zh和zs形成的样本空间如图7b所示,显见样本点在子空间各个区域的分布比较均匀。样本点在其他因素张成的子空间同样呈现了均匀分布的全覆盖状态。
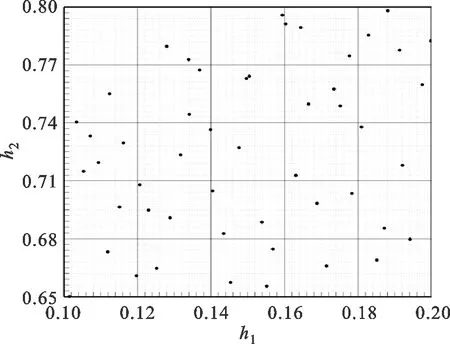
(a)h1-h2
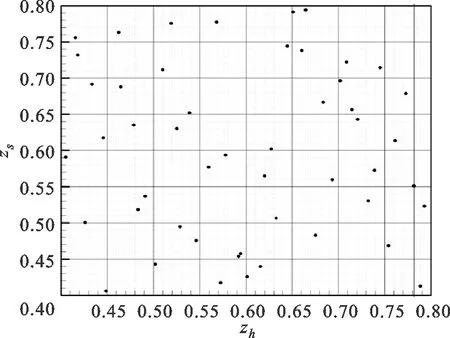
(b)zh-zs图7 50水平的样本分布(第一级叶轮型线)Fig.7 50-level sample distributions (impeller profile of 1st stage)
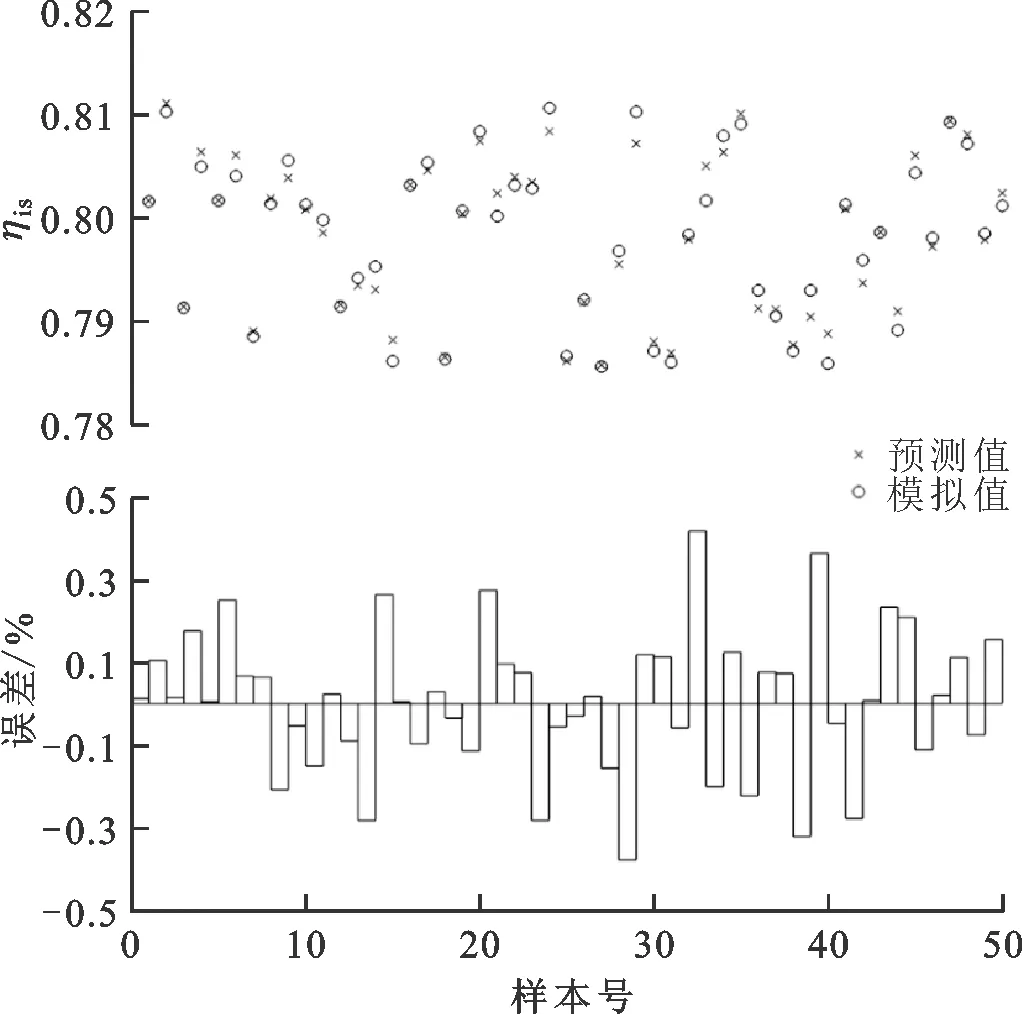
(a)第一级效率

(b)第一级压比
(c)第二级效率
(d)第二级压比图8 代理模型预测精度Fig.8 Prediction accuracy of surrogate model
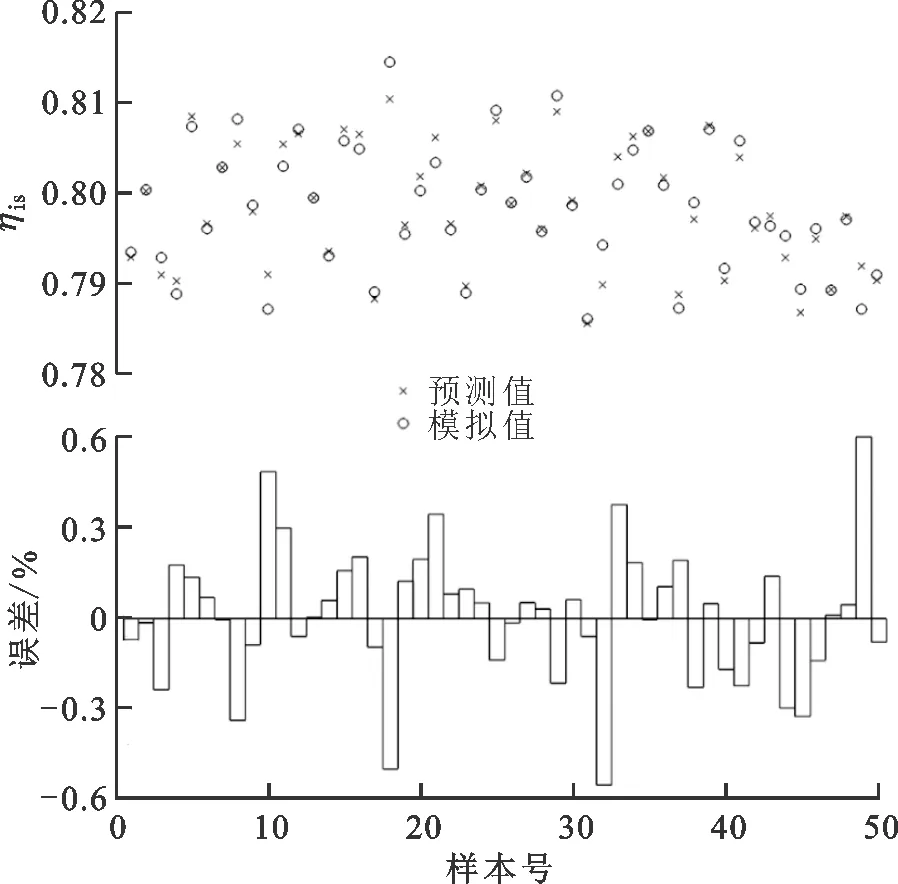
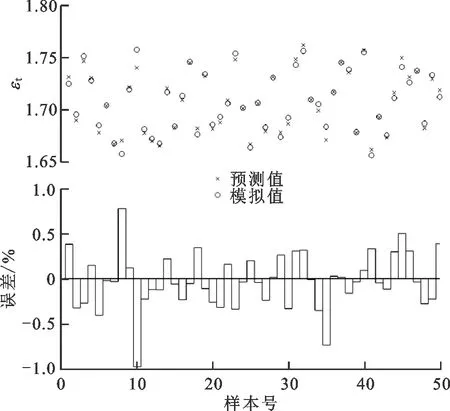
分别对两级叶轮的设计变量空间抽样,获得各50个样本点并进行CFD流场计算,获得各样本在设计工况下的效率及压比,运用2.2节所述RBF神经网络代理模型进行训练,将11个设计变量的样本值作为代理模型的输入参数,设计工况的效率和压比作为代理模型的输出参数。使用10折交叉验证法进行训练和测试,用10次训练的平均误差评估代理模型的预测精度。如图8所示,RBF神经网络建立的代理模型精度较高,第一级效率及压比、第二级效率及压比的最大误差分别为0.42%、0.84%和0.6%、0.97%,说明代理模型能够比较准确地描述设计变量与目标函数间的映射关系。
为使空压机在设计工况附近的流量范围具有较高的效率,定义设计转速、流量0.15 kg/s时对应的工况为优化设计考虑的非设计工况,并进行样本集CFD计算和代理模型训练。为确保燃料电池空压机达到排气压力,约束设计工况的压比不低于表1中设计压比。具体地,对第一级叶轮,包含约束值条件的优化问题表述如下
(11)
对于第二级叶轮设计,εt,des(X)≥1.7。设计变量X的取值范围已由式(10)给出。

(a)第一级

(b)第二级图9 多目标优化的Pareto前沿Fig.9 Pareto frontier of multi-objective optimization
采用多目标灰狼算法进行设计变量寻优,设定初始种群数为100,外部种群数为200,最大迭代次数为300。目标函数φdes、ηis,off和εt,off的离散点分布及寻优计算得到的Pareto前沿如图9所示,由图可知3个目标无法同时达到最优。对于第一级叶轮,εt,off大于1.693时,φdes和ηis,off可同时增大,当εt,off低于1.693时φdes减小。对于第二级叶轮,εt,off大于1.647时,φdes和ηis,off可同时增大,当εt,off低于1.647时φdes减小。与εt,off为1.693和1.647对应的εt,des分别为1.8和1.7,均为约束值。考虑到燃料电池空压机压比过大会导致较高的寄生功率,本文优化设计更关注空压机的效率,最终取εt,off为1.693和1.647对应的设计点为最优设计点,如图9和图10中所示。图10给出了图9中的Pareto前沿点对应的性能数据,可见在第一、第二级叶型最优设计点处,εt,des分别为约束值1.8和1.7,ηis,des分别为80.96%和80.97%。
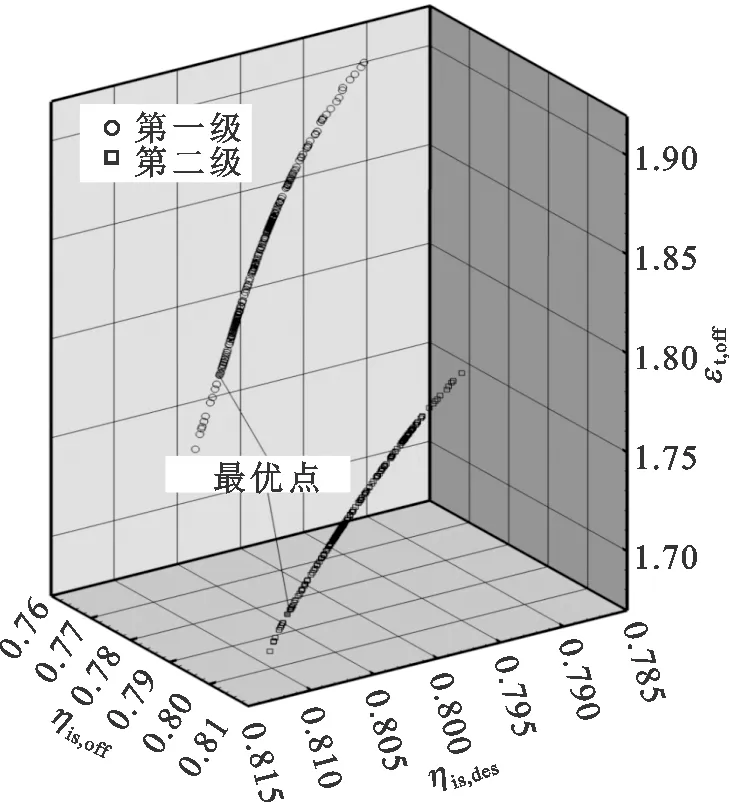
图10 Pareto前沿的性能数据Fig.10 Performance data of Pareto frontier
对最优设计点的性能数据进行CFD计算校核,与基于代理模型的优化结果比较,如表2所示。各项误差均在1%以内,表明基于代理模型的叶型优化设计结果具有较高的精度。

表2 最优点性能的精度校核
第一级叶轮的原始型线和优化型线如图11所示,优化后叶片入口角变化较小,出口几何角β2由56°减小至50.2°,后弯程度增大可改善叶轮流道出口分离,使叶轮气动效率提高。优化后子午型线出口由轻微斜流转为基本径向,轮毂出口倾角γh成90°,流道拐弯有所延迟,且转向后的流道面积更大,使流场扩压和速度变化更为平缓。第二级叶轮优化型线相对原始型线的变化规律与第一级叶轮相同,其中β2由63.5°减小至53.1°。β2减小可改善叶片吸力面的流动分离,在一定程度上提升效率,但β2减小不利于提升压比,过低的β2无法实现设计压比的约束。进口几何角β1决定了进气冲角和进气损失。γs和γh反映叶轮出口的斜流程度,对压比结果有显著影响,这两个参数与zs和zh共同决定了子午流道拐弯位置及拐弯处型线曲率,通过改变流场分布对叶轮效率和压比同时产生影响。叶表型线设计变量s1、s2、h1、h2和β1、β2一起决定了叶轮的载荷分布、扩压和损失特性。各叶型设计变量耦合影响着叶轮气动性能,其间不存在显式关联性,优化型线对气动性能的提升机制应结合流场结果进行分析。

图11 优化叶型与初始叶型对比(第一级)Fig.11 Comparison of optimized profile and initial profile (1st stage)
计算得到优化前后两级叶轮的效率曲线如图12所示,优化后各级的效率在全流量范围内都得到了显著提高,采用本文程序计算,设计流量点两级叶轮的等熵效率分别提高2.2%和2%,非设计流量点效率分别提高2.9%和2.2%,Fluent软件计算得到的效率曲线体现了相近幅度的效率提升,两种计算手段均反映出优化型线提升效率的趋势。另一方面,优化后工况范围得到拓宽,堵塞点流量增大。

(a)第一级

(b)第二级图12 优化前后各级叶轮效率曲线对比Fig.12 Comparison of efficiency curves before and after optimization
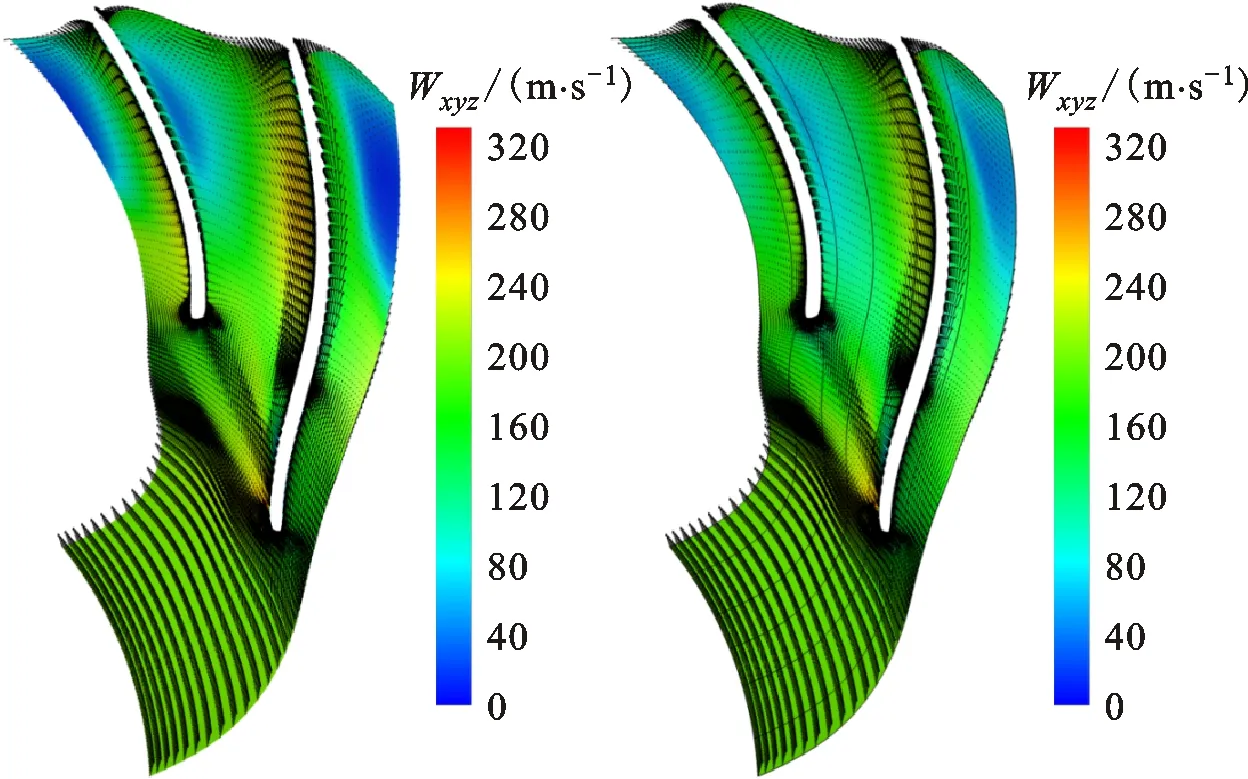
(a)优化前 (b)优化后 图13 第一级叶轮优化前后在设计点85%叶高处的相对速度分布Fig.13 Velocity distributions of 1st stage impeller before and after optimization (design point,85% blade height)

(a)优化前 (b)优化后 图14 第一级叶轮优化前后在非设计点85%叶高处的熵分布Fig.14 Entropy distributions of 1st stage impeller before and after optimization (non-design point,85% blade height)
图13所示为第一级叶轮流道在设计流量点85%叶高位置处优化前后的相对速度分布,优化前原型叶轮的流道后部有大片低速流动区域,优化后叶轮出口角减小,降低了流道扩压程度,改善了吸力面流动,使流道后部流速增大,吸力面附近低速区显著减小。图14所示为第一级叶轮流道在非设计流量点85%叶高位置处优化前后的熵分布,可见优化后流道后半部的熵增显著减小,低速流动区和熵的减小表明优化后叶轮流场得到改善,因而等熵效率提高。第二级叶轮优化前后的流场变化情况相近,此处不再赘述。
4 结 论
(1)结合参数化建模、拉丁超立方抽样、径向基函数神经网络及多目标灰狼优化算法,提出了多目标多工况带约束的智能优化设计方法,实现了某两级燃料电池空压机叶轮气动型线智能寻优的完整设计流程。
(2)拉丁超立方抽样实现了样本点在设计变量空间的均匀分布。RBF神经网络建立的代理模型能够准确描述设计变量与目标函数间的映射关系。
(3)根据寻优计算得到的Pareto前沿,获得了设计压比约束下的最优效率。优化后子午型线出口倾角增大、叶片出口角减小,叶轮通道低速流动区域减小、熵增降低。
(4)考虑设计转速下的设计流量和非设计流量工况进行两级叶轮的优化,以提升设计点附近区域的性能。多工况优化使两级叶轮在设计流量点的效率提高2.2%和2%,非设计流量点的效率提高2.9%和2.2%。
本文提出的方法和自主开发的程序可为高性能燃料电池离心空压机的优化设计提供技术支撑。