光伏并网系统的谐波谐振评估与安全防控
2021-09-07张思源张建南张玄哲李志前
张思源,张建南,马 桢,张玄哲,冯 勇,李志前
(国网河南省电力公司驻马店供电公司,河南 驻马店 463000)
电力系统的谐波谐振通常在高电压电流的巨大能量交换背景下发生,可能会导致电气设备的损坏或误动,对电力系统的稳定运行造成冲击,因此对谐波谐振的风险防控是必不可少的[1]。新型能源以及各灵敏度较高的交流输配电系统接入电网后,其运行方式的复杂性会导致电气设备指标实时变化,进一步引起电力网络的谐波导纳矩阵频繁改变,从而影响电网的谐波谐振特性。由此可见,对电网中谐波谐振的参数安全域分析十分必要[1-2]。
在光伏网络中,为获得光伏逆变器主导参数安全域,可利用传统模态分析法建立谐波节点导纳矩阵并观测其特征值是否趋近于零,将所求导纳矩阵中的特征值进行逐点分析。但此方法最终效果取决于所选逐点步长及涵盖区域大小,为保证分析结果的精确性,需要大量选取样本点从而延长了计算时间。随着电网规模扩大和光伏逆变器主导参数变量的增加,逐点法计算耗时冗长的问题亟待解决。针对这些问题,为避免特征值计算,根据谐波导纳矩阵中各元素估计特征值的分布范围求解光伏并网系统谐波谐振安全域逐渐成为热点。目前光伏并网主要集中在光伏阵列的网络拓扑结构及控制策略的探究,围绕降低光伏并网系统的输出谐波含量、光伏发电的最大功率点跟踪(Maximum Power Point Tracking,简称MPPT)技术、谐波劣化影响因子等方面展开,而对于光伏电站并网后,谐波源主导控制器参数对输出电能质量的影响则鲜有探索。本文在建立光伏谐波源等效模型的基础上,基于Gerschgorin圆盘定理求解状态矩阵的最优相似变换模型,从而构建出光伏逆变器参数的安全域。
1 谐振模态分析
1.1 新型模态分析法
本文采用频域模态分析方法,考虑光伏并网过程中谐波源的输入导纳,对整个拓扑网络进行了模态分析,着重考虑了引起谐振模式的品质因数Q,Q因子和模态阻抗的大小一样重要。运用奈奎斯特图(见图1)计算谐振频率和品质因数,更能直观地反映出状态矩阵的盖尔圆圆心是否处于基于圆盘定理构建的参数稳定域内。

图1 奈奎斯特阻抗图
可以按照图1所示的示意图在奈奎斯特图中绘制Zm(见图2),该方法被称为“圆拟合”方法。模态阻抗Zm是网络中导纳的线性组合,可能有多个谐振频率。在所研究的谐振频率ωr附近的频率范围内,Zm的正交性可用于将系统简化为二阶系统。

图2 RLC电路图
因此,Zm可以推导为

(1)
其中,Q等于ωr/2α,在谐振频率ωr稳定的状态下其变化取决于R值的改变。因此,Zm(ωr)的值也可能受到Q的影响。然后,通过用jw代替S,Zm的虚部与实部之比,也是tanγ,可以导出如下公式:
(2)

1.2 谐振模态灵敏度
谐振灵敏度揭示了电力系统各参数波动对谐振模态的影响因素,对于电力系统拓扑结构设计、参数优化等方面起到了不可或缺的作用。为分析电力系统各参数对谐振频率及幅值这类重要谐振指标的影响程度,提出一种谐振模态灵敏度分析方法。该分析方法以复导纳矩阵为依据,针对谐振频率及幅值两个主要谐振指标,来分析各电网中各参数对其产生的影响。利用该方法,可克服实数矩阵维数过高、计算时间冗长的缺点,而且也可解决实数矩阵中两个不同模态会产生重复谐振信息的问题。
对于谐振模态灵敏度指标的定义:设P为并网系统局部参数,α%为扰动系数。令系统局部参数为p(1+α%)和p(1-α%),由此求出光伏并网系统首次谐振的频率与幅值,分别用Z(1+α%)、Z(1-α%)、f(1+α%)、f(1-α%)表示。
谐振模态灵敏度指标定义如下:
(3)
(4)
式中SZm——谐振幅值灵敏度;Sfm——谐振频率灵敏度,二者物理意义为当系统参数完全改变时,光伏系统发生谐振时幅值与频率的变化量。
光伏网络中的各部分参数对光伏谐波源的谐振有不同的敏感度,可通过调整谐振点位置来规避光伏系统的低次和高次特征谐波。
2 光伏谐波源等效模型
2.1 光伏谐波源拓扑结构
光伏并网系统中,光伏作为谐波源是系统的核心部分,可基于单相光伏逆变系统展开对谐波谐振造成电能质量畸变问题的探究。单项光伏并网逆变器结构图如图3所示。图3中,Cf为滤波器中电容参数;RLf为计及滤波电感Lf的等效输入电阻;Rg为计及滤波电感Lg的等效输入电阻;iL为单项逆变桥中的输出电流;icf为电容电流;ig为光伏逆变器并网输出电流;usabc为电网输入端电压。

图3 单项光伏并网逆变器结构图
2.2 光伏逆变器等效输出阻抗建模
光伏逆变器双环等效控制框图如图4所示。经双环控制便于获取电网电流的控制策略,使得弱电网控制系统存在大电感馈线阻抗的情况下也能保持稳定,同时可采用增大光伏并网系统阻尼的方式抑制谐振[3-4]。图4中控制变量上标“*”为参照信号,Gc(S)*Ginv、G(S)分别为内、外环补偿器传递函数。为方便后续计算,取内环控制器Gc(S)中的比例增益kPC的值为1。

图4 光伏逆变器双环等效控制框图
为精简模态分析计算流程,本文基于单相光伏并网逆变器进行建模,经光伏逆变器向电网中输入电流,可将逆变系统视为如图5所示的诺顿等效电路[5-7]:
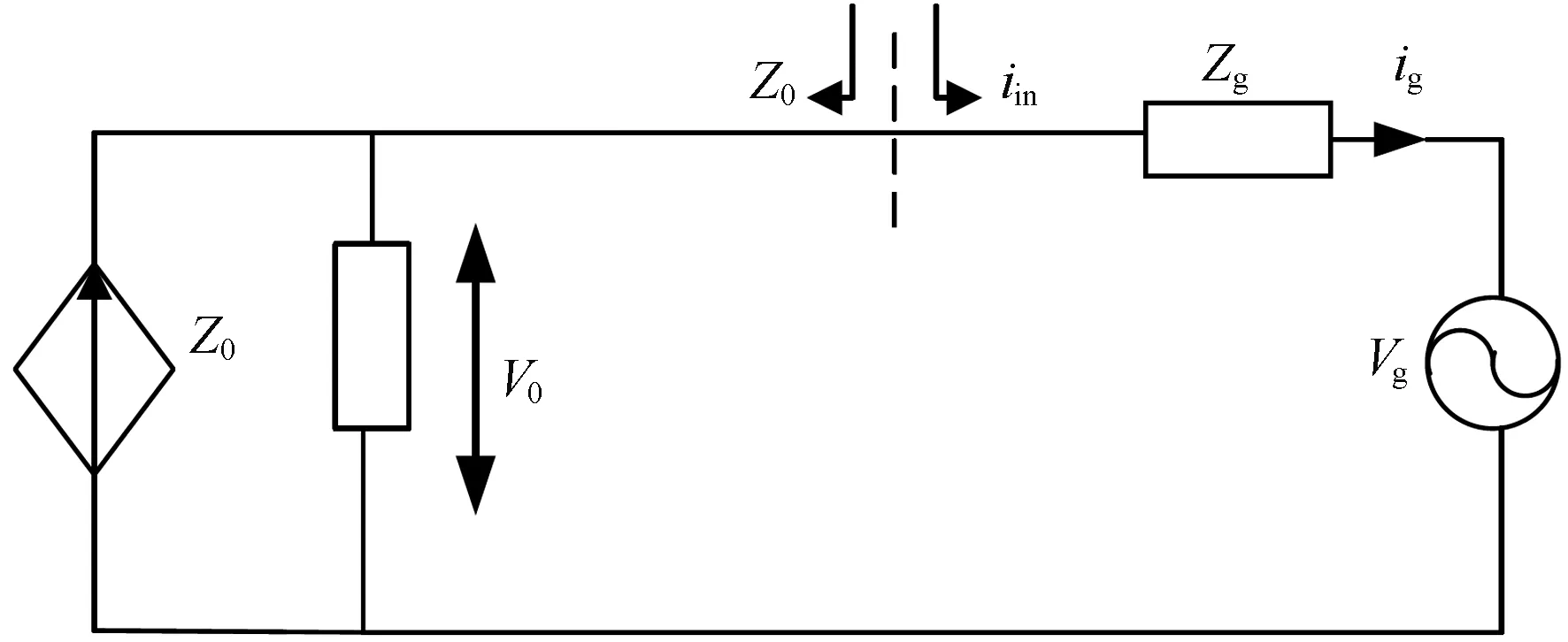
图5 逆变器诺顿等效电路
单项逆变器诺顿等效电路控制图如图6所示。
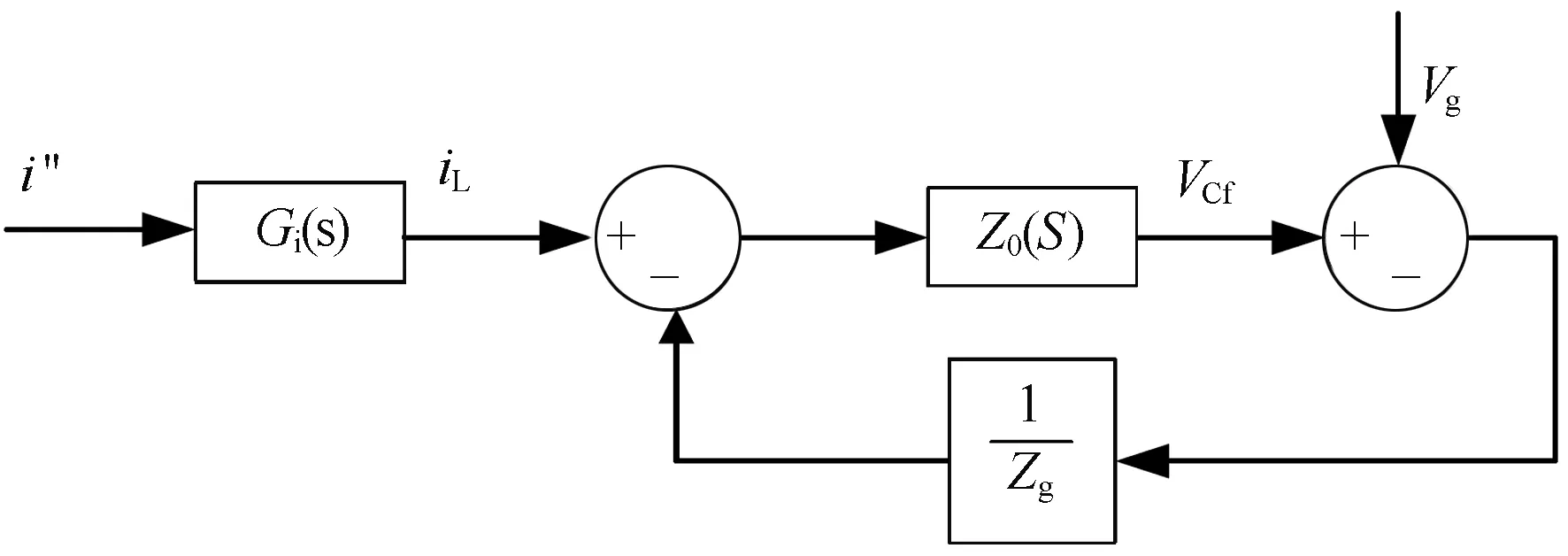
图6 单项逆变器诺顿等效电路控制图
基于逆变器控制拓扑图及光伏逆变器诺顿电路控制图,推导出并网逆变器等效输出阻抗表达式:
(5)
进一步可得:
(6)
其中,ZCf=1/(sCf),ZLf=RLf+sLf。
为了减小谐波干扰问题并简化等效模型,本文对光伏逆变器外环补偿器采用PI控制方式:
G(S)=Kp+KI/S
(7)
光伏逆变桥臂的开关频率远高于10次谐振频率,可将每个逆变器桥臂的开关周期都视作均值,逆变器桥臂的PWM信号增益表达式:
(8)
式中Vdc——直流母线电压;Vcm——载波幅值。
2.3 光伏逆变器谐振现象
电网阻抗曲线与光伏逆变系统等效阻抗的幅频特性曲线会存在部分交集,光伏并网的等效阻抗之和在此交集中为最小值,并且并网电流幅值剧增,此时便会导致光伏网络中谐波谐振现象的产生[8-10],阻抗交集即为谐振频率点。光伏谐波源在谐振振幅较低处有助于消除或抑制谐振现象的产生[4],此时谐振点(即阻抗交集处)处于10次谐波频率以上的位置。因此,可以通过改变PWM信号增益,提高控制环的应用数量,改善控制器的补偿方式来优化光伏逆变器的等效输出阻抗[12]。
3 Gerschgorin圆盘定理及降低安全域保守性措施
3.1 圆盘定理
设有状态矩阵A,A=(aij)∈Cn×n,则根据所有特征值构成的复平面圆域:
(9)
对于第i个圆盘,aii,Ri代表圆心和半径,|aii|为圆心到复平面原点O的距离,λi为特征值,矩阵A的n个特征值都在它的n个盖尔圆圆盘的并集之中,此定理为基础圆盘定理[1]。
如果状态矩阵元素为关于控制参数的函数,可在圆盘定理的基础上优化李雅普诺夫约束得到光伏控制器参数的稳定域。具体而言,基于圆盘定理构建参数安全域需要以如下2个稳定条件为基准:
稳定条件1:基础矩阵A的盖尔圆心均位于负虚轴,即:
Re(aii<0,i=1,2,…,n)
(10)
式中 Re——对状态矩阵取实部;aii——状态矩阵A的盖尔圆圆心;Re(aii)——对第i个盖尔圆心取实部;n——矩阵维数。
稳定条件2:基础矩阵A的盖尔圆心到虚轴的距离大于所处位置的盖尔圆半径,即

0,i=1,2,…,n
(11)
式中Ri——第i个盖尔圆半径;aij——状态矩阵A的非对角元素。
满足式(10)、式(11)两约束交集得到的区域为初始安全域,两约束取等号时形成初始安全域边界。在实际光伏并网系统中由于网络本身拓扑结构及参数的缘故,在状态矩阵A的对角元素实部中可能会出现正数值,无法满足稳定条件(1)的要求。因此,将对角元素实部出现正数值的状态矩阵采取最优相似变换来扩展稳定域,减小初始稳定域的保守性[2]。
3.2 减小稳定域保守性优化方法
为改善所用方法的保守性,以状态矩阵A为例,选取一组正实数m1,m2,…,mn,设对角矩阵V=diag(m1,m2,…,mn),则存在:
Q=V-1AV
(12)
状态矩阵A与扩展矩阵Q有相同的特征值。经相似变换后,状态矩阵A的特征值λi存在于复平面区域中:
(13)
式中aii,Ri——圆心和半径;|aii|——圆心到复平面原点O的距离。
由式(13)可知:选取不同组的正实数m对状态矩阵采取相似变换,并未改变矩阵特征值及相应盖尔圆圆心,但会通过灵活缩放盖尔圆大小改变圆盘稳定范围。缩放后的圆盘圆心到复平面原点的最短距离表示为
(14)
若Δlimin≤0,则原点O在对应的圆盘i内;若Δlimin≤0,则原点O未在对应的圆盘i内。
因此,若每个盖尔圆盘均满足Δlimin>0这一条件成立,则原点O独立于所有圆盘并集之外,即状态矩阵A必然不存在零特征值,意味着A必为非奇异矩阵[2]。
选取一组正实数m1,m2,…,mn进行状态矩阵的最优相似变换,建立最优规划模型。
(1)优化变量。最优化模型变量即为m1,m2,…,mn。
(2)优化目标。扩展矩阵Q1的第1个圆盘到虚轴距离Δl1尽可能大。将光伏逆变器中的PI控制参数组合代入状态矩阵A进行最优相似变换,得到基于优化变量m1,m2,…,mn的含参扩展矩阵Q1,令其第一个盖尔圆的Δl1最大化,即为目标函数:
S=max Δl1
(15)
限制扩展矩阵Q1的圆盘半径小于相应盖尔圆心到虚轴的距离,方可保证所有盖尔圆边界处于复平面虚轴左侧。优化模型的约束条件表示为
(16)
对初始状态矩阵A所采用的最优相似变换规划模型均为线性,可通过调用Matlab软件中Fimicon等函数取得优化模型中m1,m2,…,mn最优解,同理求出剩余n-1个最优解并对状态矩阵进行最优相似变换,进而求得其余n-1个安全区域,将这些安全区域取交集得到最终的最优控制器参数稳定域。
4 算例验证
以河南省驻马店区域电网为实例,基于圆盘定理求解最优相似变换矩阵模型构建出光伏逆变器的参数稳定域,算例中以一台150 MW的光伏电站作为谐波源,其中光伏并网系统中各参数如表1所示,系统网络拓扑结构如图7所示。

表1 光伏系统各参数

图7 光伏网络拓扑图
首先选取初始参数组合KI=27.12,KP=2.63。假设对角阵为V=diag(m1,m2,…,m20),根据式(14)、式(15)的最优化模型求出此时各βi的最优解。以此为基准,在KP,KI为变量的情况下,得到含参对角矩阵V1,V2,…,V20;进而求出含参扩展矩阵:Q1,Q2,…,Q20。光伏逆变器系统的含参元素均出现在第17,18,19行的对角元素中,为使KP,KI参数满足式(10),式(11)约束条件,则有:
(17)
根据约束的交集得到光伏逆变器控制参数的安全域(见图8),即为图8中的阴影区域,虚线与横纵坐标轴所围区域即为对基础矩阵A采用逐点法运算得到的PI参数安全域。从图8中可以看出,扩展稳定域被包含在逐点法所形成的稳定域内,证实了所用方法的正确性。因此,本文基于扩展圆盘定理所求安全域更为精确。
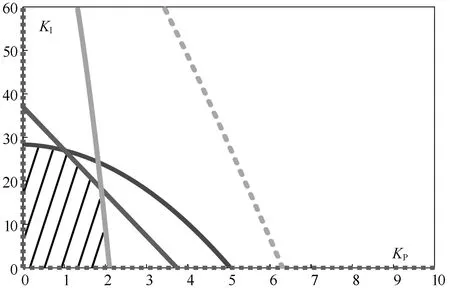
图8 KP和KI参数的稳定域
本文方法和逐点计算法耗时性进行比较。所用计算机为Windows10系统,所用软件为Matlab 2019b。假设基于扩展圆盘定理所用计算方法为方法1,逐点法为方法2,将二者构建安全域消耗时间进行对比,如表2所示。

表2 计算耗时对比
由表2可知:方法1耗时较方法2显著减少,大大提升了计算效率;方法1所构建的安全域较方法2更为精准,利用方法1可以迅速拟合出真实的安全域边界。
5 结语
本文基于光伏并网系统构建了光伏逆变器控制参数PI的安全域并对其保守性进行了优化。首先阐释了基于盖尔圆圆盘定理的主导控制器参数稳定域构建原理,以此为基准运用Fimicon函数求得最优对角矩阵并对初始状态矩阵进行最优相似变换,最后根据此优化模型构建了基于控制器参数KP,KI的安全域。采用了河南某一地区的光伏并网系统拓扑结构,通过本文方法与传统的逐点法在构建安全域范围和耗时方面进行对比,证实了本文方法在准确性和计算效率方面的优越性。
依据本文方法建立的KP、KI参数安全域可以有效而直观地反映出光伏谐波源中不同控制器参数间的契合性,便于调度人员就参数匹配状况进行评估和调控,从而针对潜在的谐振风险采取合理的预防措施。本文采用的算例模型为规模较小的新能源系统,同样适用于较大规模的光伏并网系统,后续将运用本文所提出的稳定域构建方法对更大规模光伏电网进行谐振评估和安全防控,证明本文方法在构建稳定域方面的精确性以及计算效率的优越性。
