考虑附体输入约束的高速多体船预测控制减纵摇方法
2021-08-31胡浩俊张军刘志林李国胜
胡浩俊,张军*,刘志林,李国胜
1 江苏大学 电气信息工程学院,江苏 镇江 212013
2 哈尔滨工程大学 智能科学与工程学院,黑龙江 哈尔滨 150001
0 引 言
高速多体船采用流线型支柱将排水体积与主体部分进行连接,具有航行阻力小、机动性和横向稳定性好等优势[1-2],是在船舶制造领域受到广泛关注的船型。然而,由于多体船侧体细长,在高速航行时比单体船更容易产生剧烈的垂向运动,使得升沉和纵摇运动幅度过大,易引起船舶失速、艏部砰击、船体结构损坏、乘员晕船等现象,对航行安全和船上设备的运行造成不利的影响[3-4],因此,应采取有效措施降低升沉和纵摇运动幅度。在船体上安装T 型翼和压浪板这两种类型的附体是减摇的重要手段之一,前者是一种有效的减摇附体,将其安装在船艏附近会有效增加船舶航行时的纵向阻尼,进而减少升沉和纵摇运动的幅度,改善耐波性[5-6],但这会导致航行阻力增大;而后者可以改善船舶运动姿态,达到减阻的目的。
将主动控制引入减摇附体控制系统中,随着多体船航态的改变自动调节T 型翼和压浪板的攻角,可以显著增加附体的恢复力和力矩,提高减纵摇效果[7]。然而,多体船的升沉和纵摇运动存在强耦合[8],并且T 型翼和压浪板有严格的位置饱和约束[1]。T 型翼以水平方向为基准在[-15°~15°]范围内转动,压浪板以水平方向为基准在[0°~15°]范围内转动。减摇附体若长期处于饱和状态,控制性能会下降,甚至导致动态失速,造成船舶倾覆。与此同时,附体减纵摇控制信号是影响减纵摇性能的基础。研究表明,采用纵摇角速度信号控制策略和升沉速度信号控制策略对纵摇角及升沉运动的减纵摇效果都更加明显[7]。实际上,传感器只能测量输出升沉和纵摇量,并且受到复杂的海浪有色干扰影响,所以需要估计升沉速度和纵摇角速度。
目前,涉及多体船减纵摇控制和状态估计的文献较少。针对多体船的升沉/纵摇耦合模型,文献[8]设计了比例微分(PD)减纵摇控制律,基于传递函数设计升沉/纵摇解耦矩阵,大幅限制了升沉和纵摇运动幅度,但是解耦矩阵鲁棒性较差,需要精确获得多体船水动力学系数。为了提高鲁棒性,Aranda 等[9]建立了从T 型翼和压浪板到升沉、纵摇运动的传递函数,设计了高阶定量反馈纵向减纵摇控制器,但是该方法设计的控制器其控制性能比较保守。为了易于实现减纵摇控制工程,Javad 等[10]提出了一种非线性最小时间控制方法,当模型运动方向改变时,控制T 型翼和压浪板的攻角转到反向最大值,但是采用这种方法的减摇附体一直处于饱和的正负约束边界,长期使用对减摇附体的寿命有严重影响。
预测控制是提高多体船减纵摇性能和解决附体约束的有效途径之一[11-12],其原因是:1) 预测模型可以有效处理升沉和纵摇的多变量耦合,不需要人为的解耦;2) 预测控制通过约束优化可有效处理减摇附体的约束,避免附体的长期饱和。本文拟提出考虑附体输入约束的多体船减纵摇控制方法:首先,建立多体船的垂向控制模型,分析升沉与纵摇运动的耦合性;其次,基于成型滤波器理论将海浪有色干扰白化处理,构建扩展的多体船状态估计模型,采用自适应卡尔曼滤波器在线估计多体船的升沉速度及纵摇速度;最后,提出考虑具有反馈校正和有约束的预测控制算法,定义系统实际状态值与预测值间的误差,获得带有时变误差校正的预测模型,通过误差反馈校正提高减纵摇控制鲁棒性,并仿真验证算法的有效性。
1 高速多体船的耦合垂向运动模型
由于多体船的船体关于纵向中截面对称,故其横向运动与垂向运动无耦合。T 型水翼和压浪板利用翼面产生的恢复力及力矩来抵消波浪的力与力矩,从而减小升沉和纵摇幅度。在海浪扰动作用下,升沉与纵摇耦合运动模型为[1]:
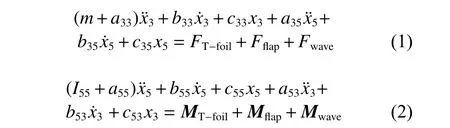
式中:m为多体船的质量;I55为 多体船关于y轴的转动惯量;a33,a55为多体船的附加质量和附加转动惯量;b33,b55为 系统的阻尼系数;c33,c55为系统的恢复力系数;a35,a53,b35,b53,c35,c53为力与力矩的耦合项系数;x3,x5分 别为升沉位移和纵摇角;x˙3,x˙5分别为升沉速度和纵摇角速度;x¨3,x¨5分别为升沉加速度和纵摇角加速度;FT-foil,MT-foil分别为T 型水翼升力和升力矩;Fflap,Mflap分别为压浪板提供的力和力矩;Fwave,Mwave分别为海浪干扰力和力矩。
从式(1)和式(2)可以看出,多体船的纵摇和升沉运动具有相互耦合特点,即a35x¨5+b35x˙5+c35x5与a53x¨3+b53x˙3+c53x3是 互 相 耦 合 的 运 动 项。为 便于控制器设计,进一步将升沉与纵摇的耦合运动学方程转化为以下状态空间的形式:

其中,
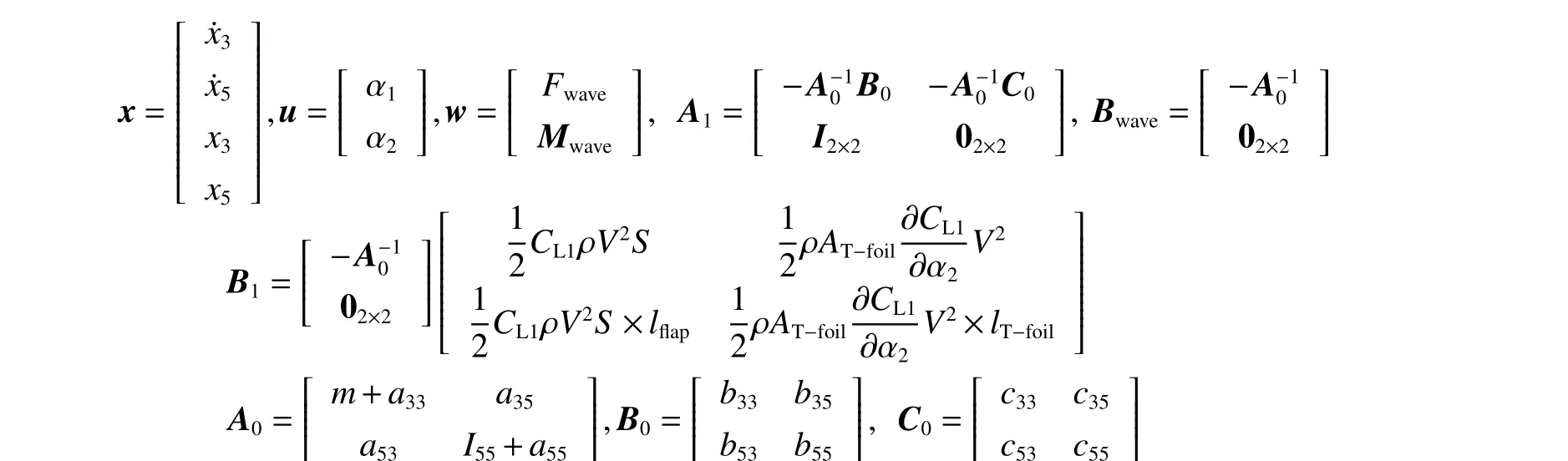
式 中: ρ为海水密度;AT-foil为 T 型 水 翼 面 积;CL为水翼的升力系数;V为流体相对T 型水翼的速度;CL1为 压浪板升力系数;S为压浪板的有效面积;α1为 压浪板攻角; α2为 T 型水翼攻角;lflap,lT-foil分别为压浪板和T 型水翼的力臂; 02×2为零矩阵;I2×2为单位矩阵。
2 高速多体船的状态估计
高速多体船的减纵摇控制目标是控制升沉/纵摇运动,降低升沉/纵摇运动幅度,并抑制参数不确定性和海浪扰动。在多体船减纵摇控制中,需要获取升沉位移、升沉速度、纵摇角、纵摇角速度4 个状态参数,而传感器只输出升沉位移和纵摇角2 个状态量,需要在线估计升沉速度和纵摇角速度。实际中,窄带随机海浪对船舶的扰动力和力矩是一种平稳随机过程,为有色噪声,若采用传统卡尔曼滤波方法进行数据滤波处理,会导致状态估计失真或者滤波发散。
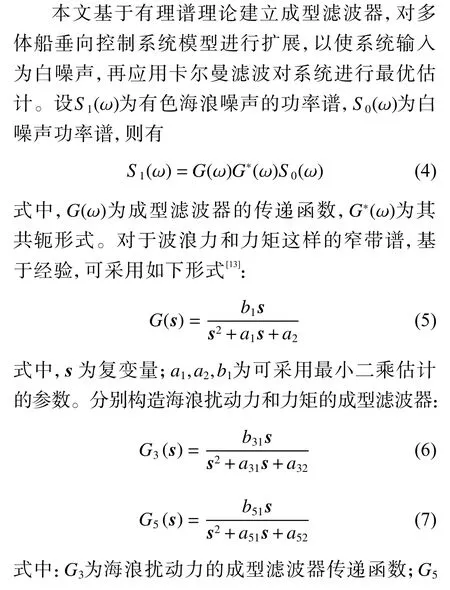
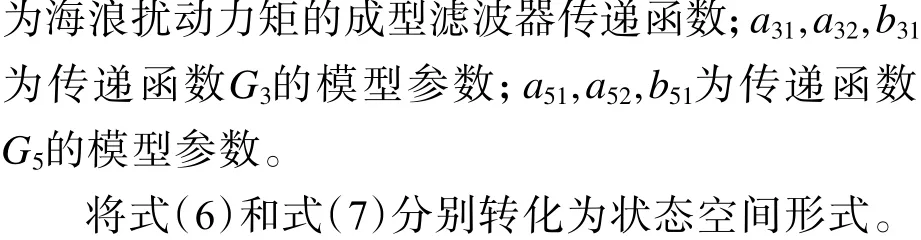
式中:m3,y3,w3,A3,B3,C3分别为海浪扰动力的状态变量、输出变量、输入白噪声、状态转移矩阵、控制矩阵、输出矩阵;m5,y5,w5,A5,B5,C5分别为海浪扰动力矩的状态变量、输出变量、输入白噪声、状态转移矩阵、控制矩阵、输出矩阵。
将以上2 个状态空间合并,得到:
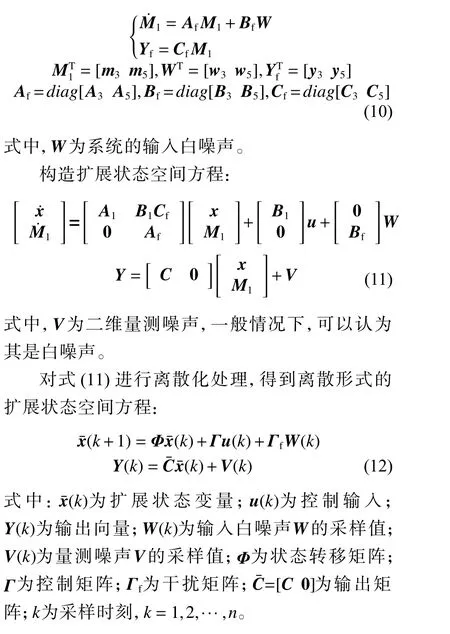
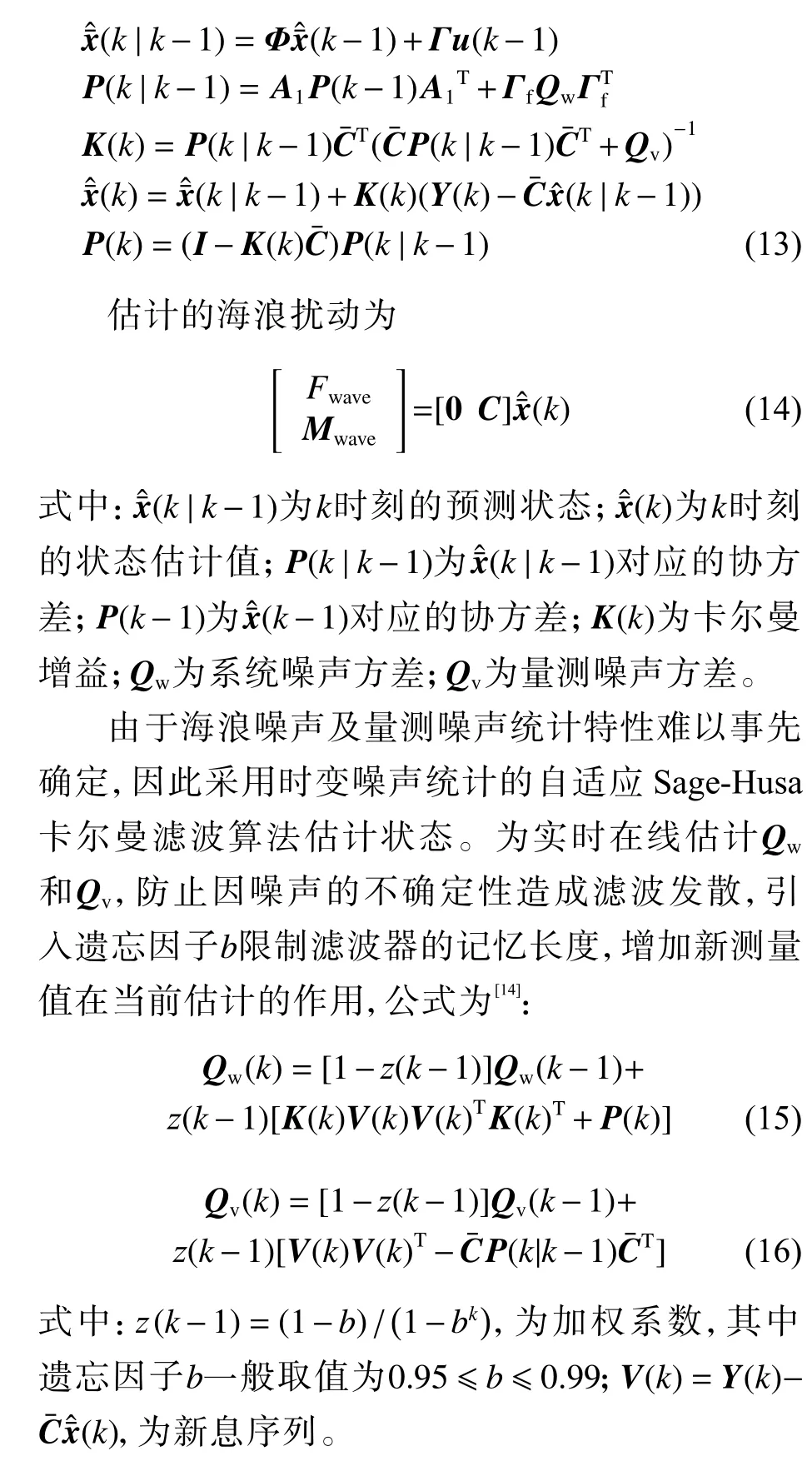
采用扩展后的离散状态空间方程式(12),可得到以下卡尔曼滤波递推式:
3 高速多体船预测控制减纵摇
高速多体船减纵摇是通过调节压浪板的攻角α1和 T 型翼的攻角 α2,使多体船的升沉位移和纵摇角达到零值附近。由于压浪板和T 型翼附体存在严格的输入攻角约束,因此采用预测控制解决输入约束。
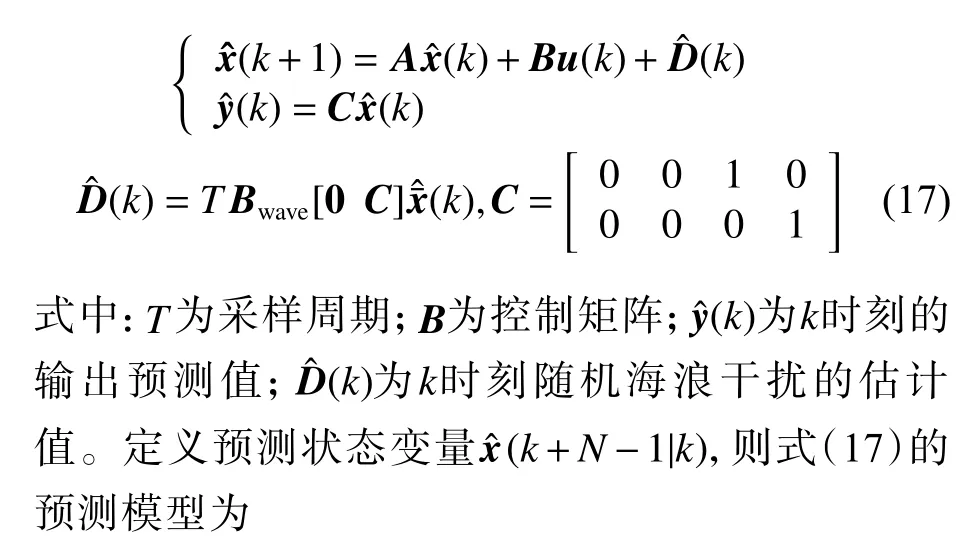
采用一阶前向欧拉法将连续状态方程式(3)转为化为离散状态方程:
由于式(18)考虑了系统存在海浪扰动,预测状态变量中存在干扰估计值Dˆ(k+N),即干扰被引入到系统的预测模型中,代入式(19)的目标函数中参与优化,保证了控制器输出在设计的性能指标下仍具有较高控制性能和强抗干扰能力。
4 误差反馈校正策略
受到高速多体船的模型参数偏差、海浪时变干扰等因素影响,多体船的模型预测状态和实际状态两者不可避免地存在误差,导致系统的控制精度和鲁棒性下降。为了减小模型参数偏差、海浪干扰等不确定因素对减纵摇性能的影响,本文提出了误差校正方法。定义k时刻的输出y(k)与预测值Cxˆ(k|k-1)之 间的误差e(k)为
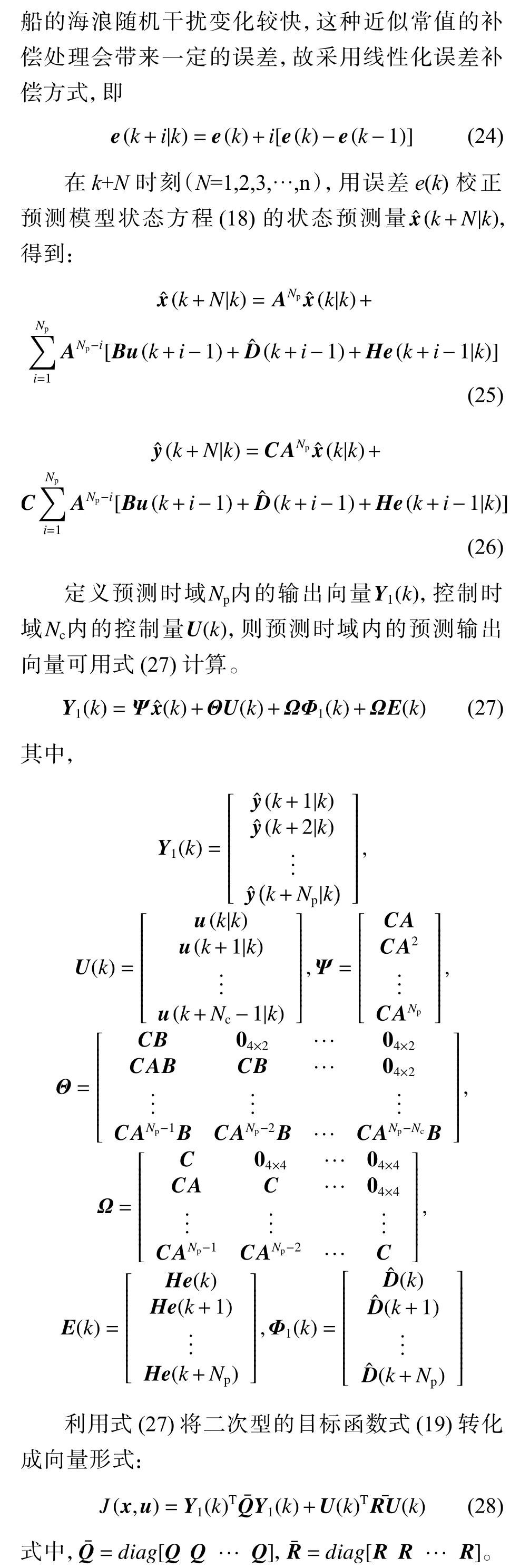
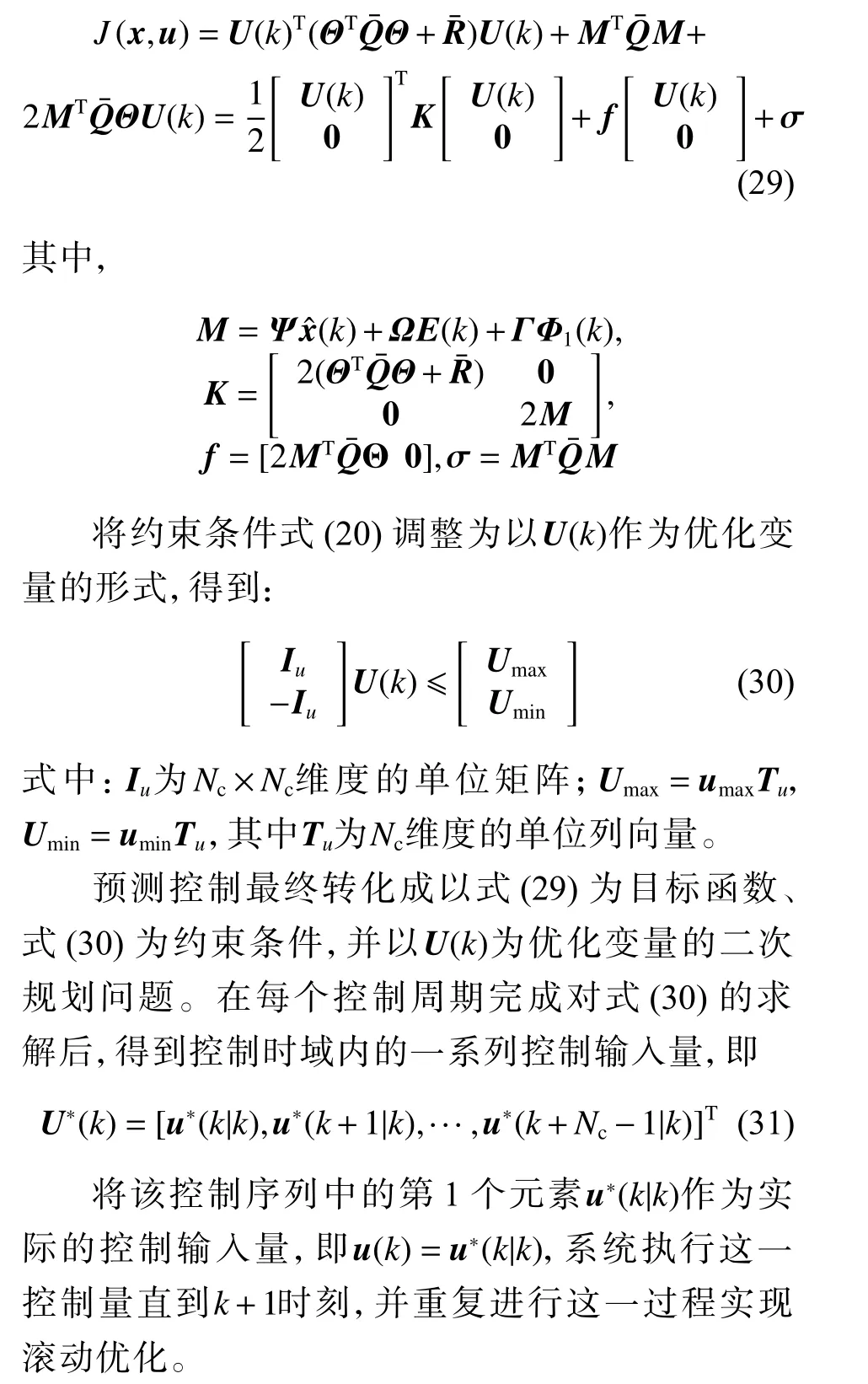
进一步转化,得到:
5 仿真分析
根据文献[3]的多体船模型来验证设计的预测控制减纵摇有效性。多体船在高速航行时受到的海况等级为4 级海况,海浪采用P-M 谱进行仿真。P-M 谱为一种重力波谱,其数学表达式相对简单,而且仅与海面上方的风速有关,方便计算,因此得到广泛应用。
1) 高速多体船的减纵摇系统量测噪声是白噪声,方差阵初值R0=diag[20.3×10-42.26×10-6];经过扩展后的系统噪声是白噪声,方差阵初值取为1。基于海浪干扰力和力矩的成型滤波器,构造扩展卡尔曼滤波器进行滤波,准确估计升沉速度和纵摇角速度,仿真结果如图1 和图2 所示。
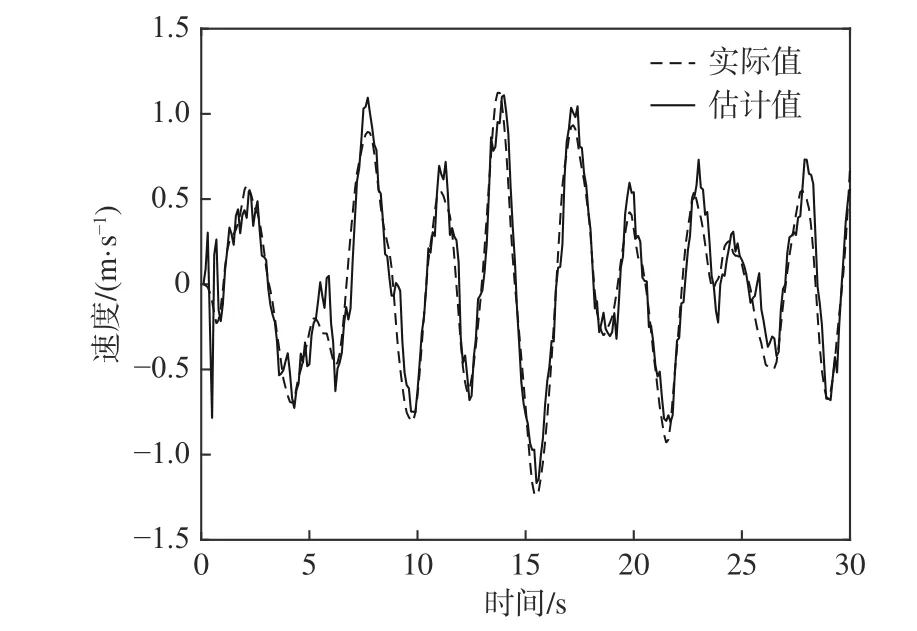
图1 升沉速度估计Fig. 1 Heave velocity estimation
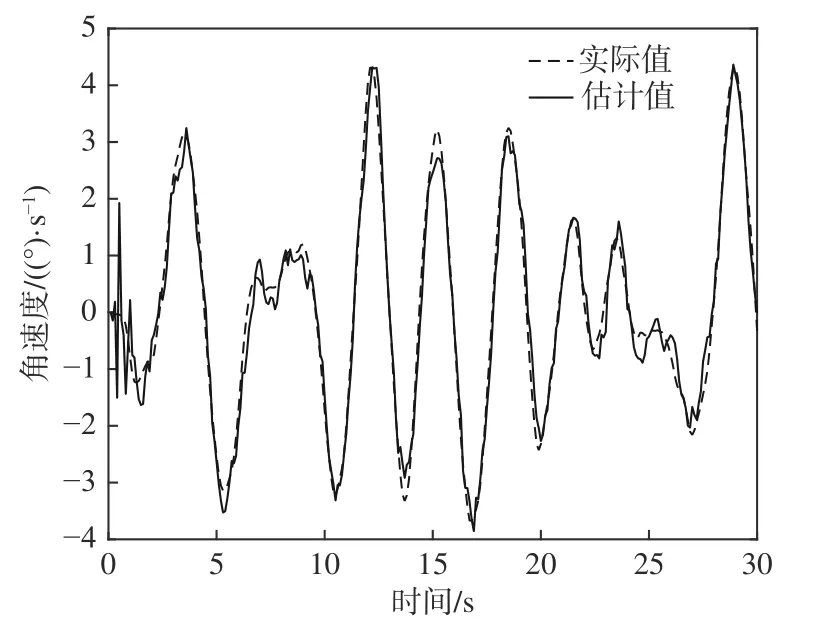
图2 纵摇角速度估计Fig. 2 Pitch angular velocity estimation
2) 针对带T 型翼和压浪板的多体船,在无控制器与预测控制(无反馈校正)情况下进行仿真,得到的升沉位移和纵摇角仿真结果如图3 和4 所示。由图可见,在采用预测控制算法后,多体船的升沉位移减少约40%,纵摇角减少约50%。T 型翼和压浪板的攻角如图5 和图6 所示,满足输入约束条件,同时避免了附件长时间处于饱和状态。
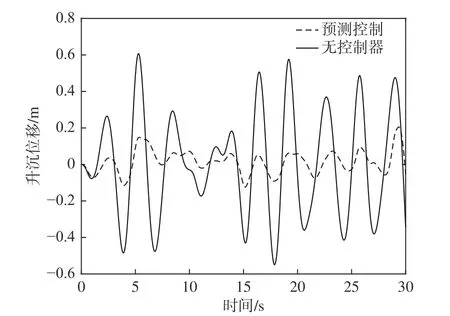
图3 预测控制和无控制器作用下升沉位移对比Fig. 3 Comparison of heave with predictive control and uncontrolled
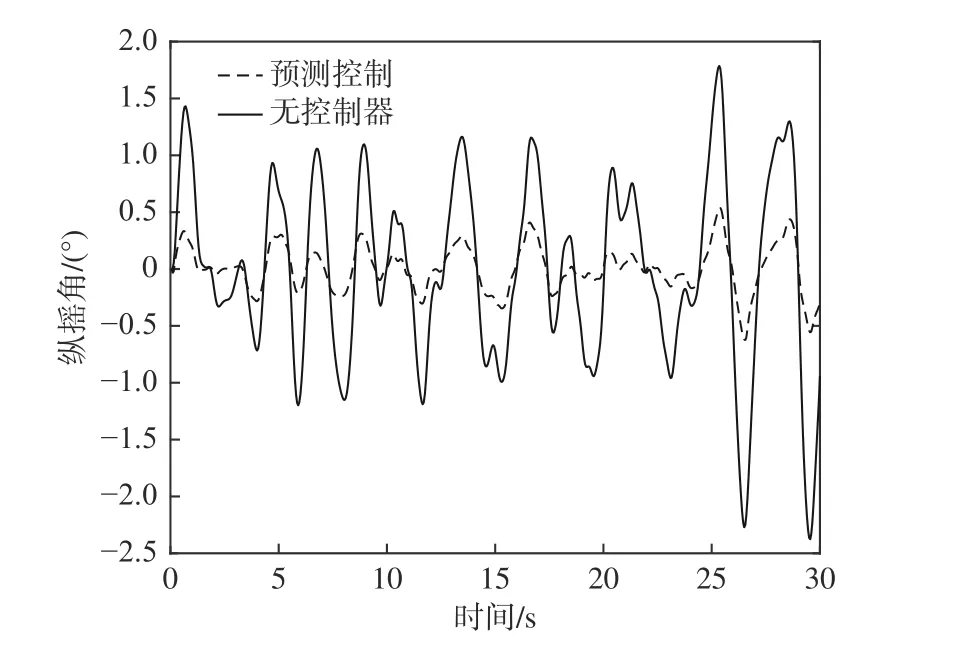
图4 预测控制和无控制器作用下纵摇角对比Fig. 4 Comparison of pitch with predictive control and uncontrolled
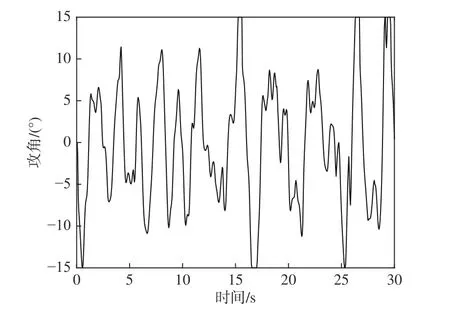
图5 T 型翼的攻角Fig. 5 Attack angle of T-foil
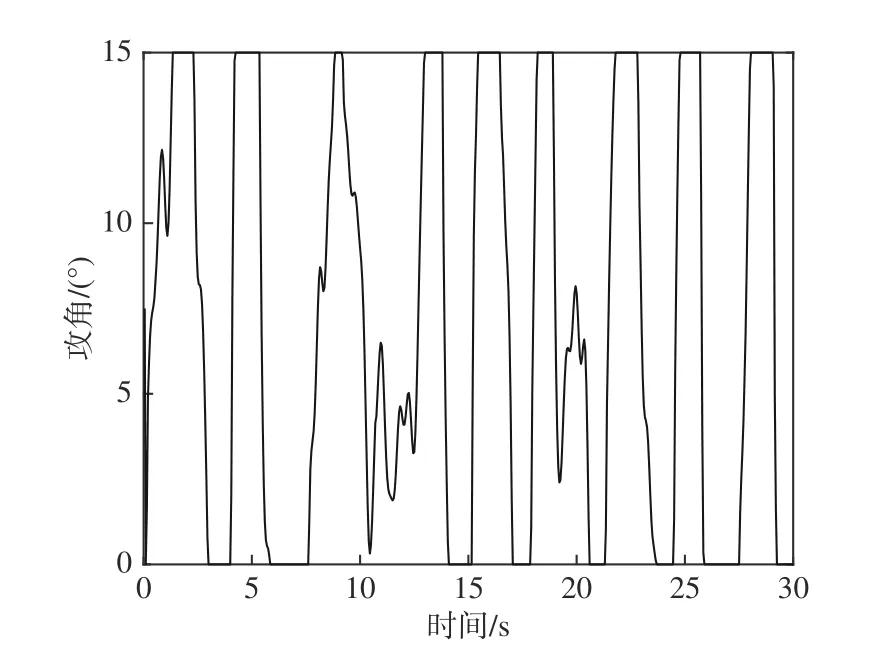
图6 压浪板的攻角Fig. 6 Attack angle of flap
3) 将本文提出的反馈校正预测控制与预测控制(无反馈校正)进行仿真比较,结果如图7 和图8 所示。由图可见,升沉位移和纵摇角进一步减少,减纵摇效果得到了有效提高。不同控制策略的标准差比较结果如表1 所示,加入反馈校正的标准差比不加入控制器和普通预测控制情况下的更小,验证了算法的有效性。
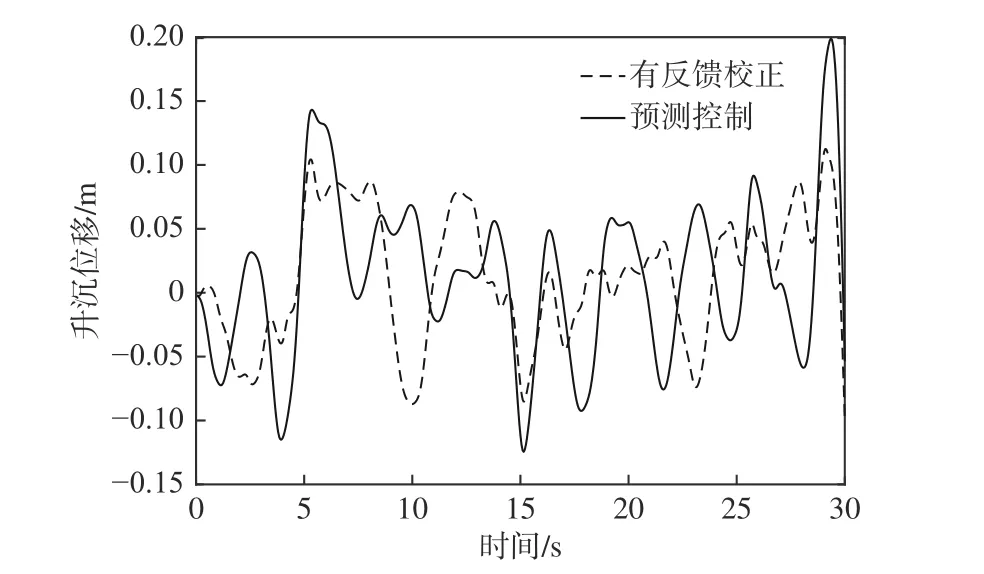
图7 有/无反馈校正的升沉位移对比Fig. 7 Comparison of heave with/without feedback correction
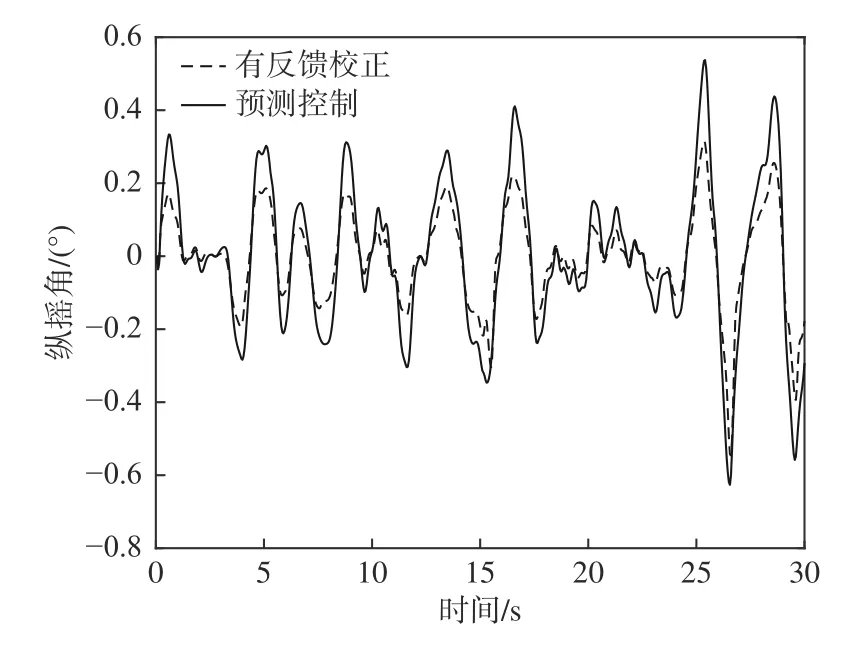
图8 有/无反馈校正的纵摇角对比Fig. 8 Comparison of pitch with/without feedback correction

表1 不同控制策略的标准差Table 1 Standard deviation of different control strategies
6 结 语
针对高速多体船在行驶过程中纵摇和升沉运动幅度过大的问题,提出了一种考虑附体输入约束的高速多体船预测减纵摇方法。建立了高速多体船的垂向耦合运动模型,基于成型滤波器理论将有色海浪干扰进行白噪化建模,设计了自适应扩展卡尔曼滤波器,在线估计多体船状态和海浪扰动。提出了考虑减摇附体约束的预测控制减纵摇策略,将线性变化反馈校正误差和估计的海浪干扰综合到预测模型中,较好地避免了附体的长期饱和问题,通过滚动优化求解提高预测控制减纵摇性能和鲁棒性。仿真结果表明,考虑反馈校正的预测减纵摇控制,有效减少了升沉和纵摇运动幅度,减摇附体输入满足约束。
