车载中心化的列车进路控制方法研究
2021-08-23马茂斐
张 勇,马茂斐,王 剑
(1.北京交通大学 电子信息工程学院, 北京 100044;2.北京交通大学 轨道交通控制与安全国家重点实验室,北京 100044;3.北京市电磁兼容与卫星导航工程技术研究中心,北京 100044)
列车运行控制系统(以下简称“列控系统”)是控制列车运行速度和间隔、保证列车安全和高效运行的重要设备。其中进路控制功能是列控系统的主要功能,目前主要通过地面计算机联锁(Computer Based Interlocking,CBI)集中控制站场信号机、道岔来实现。为精简列控系统地面设备,国内外均进行了新的进路控制方法研究。欧盟ERTMS-Regional系统取消了线路轨道电路及信号机,由地面控制中心配合轨旁对象控制器(Object Controller, OC)进行道岔控制来实现进路控制功能[1];法国ALSTOM的Urbails Fluence系统精简了CBTC,通过车载设备向OC申请轨旁设备使用权来实现进路控制功能[2];同样,文献[3]专利也以车载设备控制OC的方式提出了一种适合于车车通信的列控系统车载联锁的进路防护方法。
车载中心化的列控系统是面向我国西部地区低密度线路的新型列控系统,通过引入卫星定位、多模通信、运能动态配置、动态间隔安全控制、物联网等技术,实现车车通信、列车自主行车许可计算和列车自主进路控制。由于Urbails Fluence系统和文献[3]专利所应用的列控系统与车载中心化的列控系统在进路复杂度、进路信息获取方式等方面存在较大差异,且其中所涉及的进路控制方法难以在车载中心化的列控系统上实现,因此,为满足车载中心化的列控系统由车载设备自主实现进路控制的需求,本文基于车载设备控制轨旁控制器实现进路资源占用、释放的思想,提出一种车载中心化的列车进路控制方法,并通过典型场景建模和仿真发现了多车进路过程中潜在的“赛跑问题”,即多车进路控制过程中可能发生的死锁、活锁或者饥饿问题。
“赛跑问题”实质上是一个分布式资源联合分配问题。为避免分布式资源分配出现死锁、活锁等问题,文献[4]提出SD-RAS(Single-step Distributed Resource Allocation Systems)资源分配模型,并基于该模型阐述了一种分布式死锁预防方法ODP3(Order-based Deadlock Prevention Protocol with Parallel)。该方法基于安全路径和安全状态进行死锁预防,主要特点是允许资源申请者并行发送资源请求,且不需要请求对象之间进行消息交换。文献[5]基于ODP3算法提出ACT(Availability Check Technique)技术,通过不断检测所需资源状态来进行资源申请分配,以减少分布式资源联合分配过程中的冲突。
本文根据列车进路作业原则提出进路冲突资源分配目标函数,同时基于ODP3主协议算法、ACT技术,针对OC提出一种进路资源分配算法,并利用该算法对典型进路控制场景模型进行修正。通过对修正前后的模型进行仿真分析,验证了该算法能够有效避免多车进路过程中的“赛跑问题”,同时能够提升站内列车进路资源征用效率。
1 车载中心化的列车进路控制原理
1.1 车载中心化的列控系统结构
车载中心化的列控系统是地面设备最少化、车载功能中心化的列控系统,其系统结构见图1。
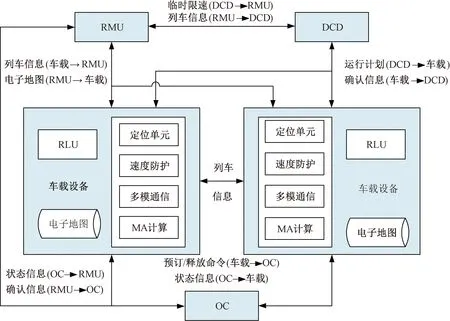
图1 车载中心化的列控系统结构
车载中心化的列控系统包括中心设备、车载设备和轨旁设备三个层次。其中,中心设备包括动态运能决策子系统(Dynamic Capacity Decision,DCD)和列控资源管理单元(Resource Management Unit,RMU)。DCD实现列车动态运营决策功能,主要负责行车计划制定、发送以及列车运行监督;RMU作为地面数据库,辅助列车进行前车识别和进路控制,支持临时限速和电子地图下载。车载设备是列控系统的核心,由列控模块、进路逻辑单元(Route Logic Unit,RLU)和电子地图数据库三部分构成。列控模块完成列车测速定位、通信、速度防护和动态间隔安全控制功能;RLU完成列车进路控制功能。轨旁设备主要包括应答器和对象控制器OC。应答器用于辅助列车定位;OC主要实现进路设备的状态采集和道岔驱动。
车载中心化的列控系统具有以下特点:
(1)全线不设置轨道电路和信号机,站间采用车车通信方式实现移动闭塞行车,站内采用虚拟闭塞方式进行列车作业。
(2)车载设备通过列车运行状态自主感知技术和列车完整性自检查技术,实现列车自主测速定位和完整性检查[6];同时车载设备还承担行车许可计算功能,能够实现列车动态间隔安全控制。
(3)沿线车站设置集中式轨旁控制器OC,完成进路设备状态采集和驱动功能。集中式OC即一个OC能够完成多个进路设备的状态采集和驱动。在沿线车站上下行咽喉区各设置一组OC,分别管辖上下行咽喉区的道岔和虚拟信号,股道虚拟信号由这两组OC共享。列车通过控制进路OC实现进路资源占用和释放来完成列车作业。
1.2 列车进路控制原理
车载中心化的列车进路控制方法主要针对低密度线路的会让站和中间站,是对地面集中联锁功能的再分配。它将进路控制逻辑转移到车载设备,设置集中式OC进行进路道岔状态采集和驱动,通过车地信息交互完成列车进路控制功能。由于车载中心化的列控系统全线不设置轨道电路和信号机,为方便列车进路控制原理描述,本文对沿线车站采用与传统信号设备相同的原则划分股道、虚拟区段,设置虚拟信号,轨旁设置集中式OC。车载中心化的列车进路控制原理如下:
(1)列车进路信息获取
列车接收到DCD发送的行车计划后,在满足进路请求时机时,通过向RMU请求站内列车位置,经过电子地图匹配,实现站内虚拟区段占用检查;同时向集中式OC请求进路相关虚拟信号、道岔状态信息,根据RLU内置的站场进路表,完成进路条件检查。
(2)列车进路资源占用
进路条件检查通过后,列车向集中式OC征用进路相关虚拟信号和道岔;在进路设备征用成功后,车载设备控制集中式OC实现道岔转换、进路锁闭、虚拟信号复示,完成进路资源占用。
(3)列车进路资源释放
列车进路建立后,列车通过列车定位单元判断进路通过情况,待列车作业完成后,车载设备输出进路资源释放命令控制集中式OC完成进路资源释放。
车载中心化的列车进路控制方法相较于传统地面集中联锁,实现了进路信息流简化。以CTCS-3级列控系统为例,CTCS-3级列控系统的进路信息流向为联锁系统—RBC—车载设备,而车载中心化的列控系统,其进路控制的信息流向为车载设备—集中式OC。简化进路信息流向可以有效减少列控系统的信息交互接口。另外,车载中心化的列车进路控制方法也可以减少地面设备,增强车载设备功能。
1.3 列车进路控制流程
本文按照列车运营场景的不同,将车载中心化的进路控制流程划分为4个阶段。
第一阶段:行车计划接收和处理。列车通过车辆段定位应答器组后,车载设备与DCD建立通信,列车在收到DCD发送的列车行车日计划后,RLU根据内置的车站进路条件表以及电子地图中线路信息,获取相应车站OC的IP、基本进路号和变通进路号。
第二阶段:列车进路触发时机确定。发车进路触发方式为时间触发;接车进路触发方式为空间触发。接车进路触发点由列车速度、接近区段长度、站间距离、最不利进路排列时间、线路最大允许速度等因素共同决定,RLU根据相关信息计算列车进路控制触发点。当满足触发条件时,列车开始进路建立。
第三阶段:列车进路建立。RLU根据RMU、OC交互信息进行进路条件检查,通过向OC发出进路控制命令进行资源征用和道岔转换,进而完成进路选排,在完成进路锁闭和虚拟信号复示后,实现列车进路建立。列车进路选排条件[7-8]见表1。

表1 列车进路选排条件
第四阶段:列车进路解锁。RLU根据列车位置判断列车进路通过情况,生成进路资源释放命令,控制集中式OC进行进路资源释放,完成进路解锁。列车进路解锁条件[7-8]见表2。

表2 列车进路解锁条件
从功能上说,车载中心化的进路控制方法与地面集中联锁均是完成进路建立、解锁和列车进路防护,但是两者间仍然存在较大差异。
(1)进路概念存在差异。在列车进路控制方法设计过程中,为避免多个OC的进路控制逻辑相互耦合,将传统意义上的通过进路划分为股道接车进路和股道发车进路,保证一条进路资源仅由一个OC管辖。
(2)进路资源规模存在差异。地面集中联锁管辖进路资源基本固定,进路状态可以罗列,进路资源规模较小;车载中心化的进路控制方法可以随进路列车运行到不同车站使用不同进路资源,进路状态几乎不可罗列,进路资源规模较大。

图2 南山口站上行咽喉
(3)进路建立、解锁存在差异。相比于传统联锁进路建立、解锁流程,车载中心化的列车进路控制方法在进路选排阶段增加了资源征用流程;由于不存在站内轨道电路,故在进路锁闭阶段不存在区段锁闭,在进路解锁阶段不存在区段故障解锁;除此之外,在信号开放阶段,虚拟信号开放主体为RLU,OC只进行虚拟信号复示,虚拟信号不指示行车,仅进行进路防护。
(4)功能实现方式存在差异。地面集中联锁集中控制多条进路,利用布尔逻辑和时序逻辑来保障站内资源安全使用和释放[3];车载中心化的进路控制方法相当于进路列车都能够独立进行进路防护,能够利用持续的车地信息交互实现进路资源的申请和释放。
2 进路控制场景Petri网建模
2.1 有色Petri网
有色Petri网作为一种高级Petri网模型,通过对库所和令牌加以颜色类型标定,对弧和变迁加以条件约束,对多车线性执行进路过程中的并发性、异步性和不确定性行为具有较强的动态分析能力[9];除此之外,有色Petri网有着良好的建模仿真工具CPN Tools,可以方便地对模型进行仿真和验证。因此本文将有色Petri网作为列车进路控制场景分析的主要工具。
有色Petri为一个7元组,形式化定义为[10]
Σ=(P,T;F,C,I-,I+,M0)
式中:(P,T;F)为有向网,称为Σ的基网;P为基网库所集,表征模型可能的存在状态;T为基网变迁集,规定了模型中颜色的所有活动规则;F为基网有向弧集合;C为基网颜色集,可以包含一个或者多个Token;I-、I+分别为P×T上的负、正函数,使得对所有的(p,t)∈P×T;M0为基网Σ初始标识,表征基网Σ的初始状态。
2.2 进路资源征用模型建立
2.2.1 站场拓扑结构描述
以青藏铁路南山口站上行咽喉为例,其站场平面见图2(a)。将站内虚拟信号、虚拟区段、道岔抽象为数据节点,以双向链表形式建立拓扑结构,见图2(b)。AVT1、AVT2数据节点分别为虚拟接近、离去区段;VT数据节点为虚拟区段;VS数据节点为虚拟信号;SW数据节点为站内道岔。
2.2.2 集中式OC进路处理流程
在车载中心化的列控系统中,车地通信采用的是全IP通信方式[11]。进路控制信息包通过全IP通信方式到达OC的物理消息缓冲队列,OC进行相应的安全通信协议解析和控制命令执行。假设在集中式OC的一个处理周期(本文采用150 ms)内,有多个列车的进路控制信息包通过全IP通信方式串行到达集中式OC的消息缓冲队列,OC将这些进路控制信息包从消息缓冲队列中取出,并行完成Subset-037和ALE安全通信协议解析。OC的串行征用流程是将信息包按照解析完成的先后顺序串行置入控制命令缓冲队列,然后串行执行进路控制命令,见图3(a);而OC的并行征用流程是并行解析完进路信息包后,并行执行进路控制命令,见图3(b)。

图3 进路控制信息处理流程
OC串行征用方式在同一时刻仅仅能执行一列列车的进路控制命令,平行进路列车作业和不冲突列车进路作业不能够同时执行,将影响站内列车作业效率;除此之外,OC串行征用方式只能按照进路控制命令解析完成的先后顺序执行进路控制命令,无法保证高优先级列车优先完成站内列车作业。因此在车载中心化的列控系统中,集中式OC采用并行征用方式。
2.2.3 典型场景建模
基于OC并行征用流程,考虑如下典型场景:列车1(192.10.0.1)和列车2(192.10.0.2)当前位置见图2。列车1需从当前位置运行至ⅡG停车,其选择进路集合为{VS_S,VS_SⅡ;SW2_4,SW6_8,SW10;AVT1,VT2,VT2_8,VT8_10,ⅡG};列车2需从当前位置运行至AVT2,其选择进路集合为{VS_X1,VS_D2;SW10,SW6_8,SW2_4;1 G,VT8_10,VT2_8,VT6,AVT2}。假定列车1和列车2选择的进路集合中的虚拟区段均空闲,由于虚拟区段不存在征用情况,因此列车1需要征用进路资源为{VS_S,VS_SⅡ;SW2_4,SW6_8,SW10},列车2需要征用进路资源为{VS_X1,VS_D2;SW10,SW6_8,SW2_4}。基于该典型进路控制场景,建立从列车进路资源征用命令发出到OC完成进路设备征用过程的有色Petri网模型,见图4。图4中CPN模型含义见表3。
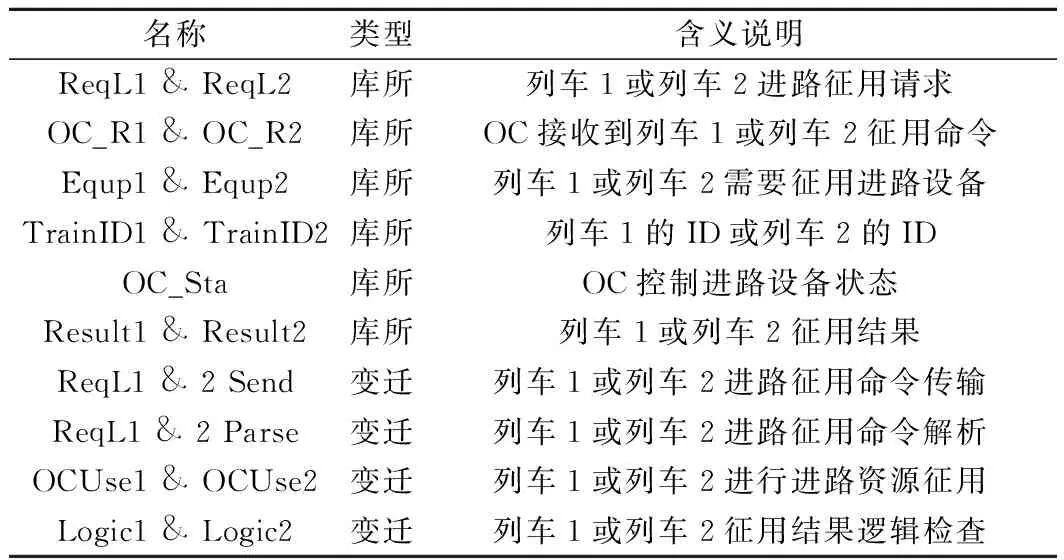
表3 进路资源征用CPN模型含义说明
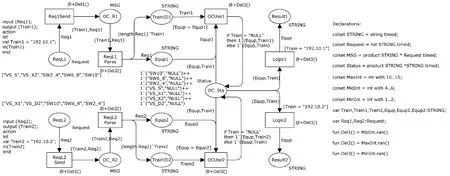
图4 进路资源征用CPN模型
在进路资源征用CPN模型中,进路资源征用命令用颜色集Msg中Token表示,进路设备状态用颜色集Status中Token表示。进路资源征用命令由列车1和列车2发出,经过全IP通信方式传输给集中式OC,OC并行解析列车1和列车2的进路控制信息包,获取相应的进路资源征用命令,根据资源征用命令并行征用列车1和列车2的进路相关设备。
简单认为在进路建立和进路解锁过程中,进路列车与集中式OC进行周期性的车地信息交互。参考CBTC系统中LTE的相关性能指标,设置进路列车与集中式OC车地信息交互周期为300 ms[12-13]。因此进路资源征用模型的信息传输和延时模拟以10 ms作为一个时间单位,通过设置车地通信时间函数Del1()模拟车地通信延时;设置解析执行函数Del2()模拟征用命令解析和征用时间;设置征用检查函数Del3()模拟征用命令检查时间。
2.3 仿真分析
在进路资源征用CPN模型中,若Result1库所出现5个Token,分别为1-"VS_S"、1-"VS_S2"、1-"SW2_4"、1-"SW6_8"、1-"SW10",则表明列车1征用成功,反之则表明列车1征用失败;列车2征用成功与否判断方式与列车1类似。对双车资源征用CPN模型进行1000次仿真,仿真结果见表4。

表4 CPN模型1000次仿真结果
在CPN模型中,库所中OC_Sta包含的Token数目能够满足列车1或列车2的进路需求,但是不能同时满足两列车进路需求。在理想状态下,列车1或者列车2必定只能有一个征用进路资源成功。由表4可以看出,进路资源征用模型仿真出现两列车均未征用成功的情况。其主要原因在于列车1与列车2的进路控制过程是线性的,而OC无条件接受列车进路资源征用命令,列车1和列车2在征用进路资源时发生冲突,从而导致双车进路征用均失败。由此认为多车进路控制过程存在“赛跑问题”。
在车载中心化的进路控制方案中,集中式OC始终坚持一个原则,任意一个进路设备至多只能被一列车征用,不能分配给多列车,而且后续进路控制流程都建立在进路资源征用成功的基础上。因此“赛跑问题”只会在进路资源征用阶段出现,故本文将从进路资源征用阶段入手去解决多车进路控制过程中的“赛跑问题”。
3 进路资源分配算法
3.1 进路冲突资源分配目标函数
3.1.1 列车作业原则
本节主要目的是解决车载中心化的多车进路控制过程中的“赛跑问题”,因此不考虑车站进路元素的权重和列车正晚点情况。简单假定站内进路相关元素权重相同且OC进行进路资源分配时不会导致进路列车出现晚点情况。为满足车站列车作业的需求,基于一条进路至多存在一列车的根本原则,从保障列车作业完成、进站效率和进路优先级方面,总结出列车作业原则为
①长进路作业保障原则:杜绝长进路作业出现的饥饿问题。
②进路效率最优原则:当前列车作业有利于后续列车作业的进路排列,即列车作业尽量减少对站内列车的影响[14]。
③短进路作业优先原则:优先实现短进路列车作业。
④接车作业优先原则:优先实现接车进路列车作业。
⑤客车作业优先原则:在线路客货车混跑情况下,优先实现客车作业。
⑥高速列车优先原则:在线路高低速列车混跑情况下,优先实现高速列车站内作业。
3.1.2 进路资源形式化定义
定义2 OC征用资源集Gu_route:Gu_route={Gu_vs,Gu_sw},其中Gu_vs为征用信号集,Gu_sw为道岔集。
定义3 OC临时资源集Gt_route:包括ΔT时间内纳入OC处理的进路请求资源集,即Gt_route=∪Ri。
定义4 进路可用资源集Ga_route:Ga_route∩Gu_route=∅且Ga_route⊆Gt_route。


定义7 进路冲突资源集Gd_route:Gd_route⊆Gt_route,Gd_route内任意两个进路请求资源集Ri和Rj存在冲突。
定义8 进路价值函数:主要表征进路冲突集中进路请求资源集Ri的征用优先级;若进路冲突资源集Gd_route={R1,…,Ri,…,Rk},对于任意Rj∈Gd_route,则Rj进路价值函数Value(Rj)为
λ×V(Rj)+w×type(Rj)
(1)
式中:各变量含义见表5。
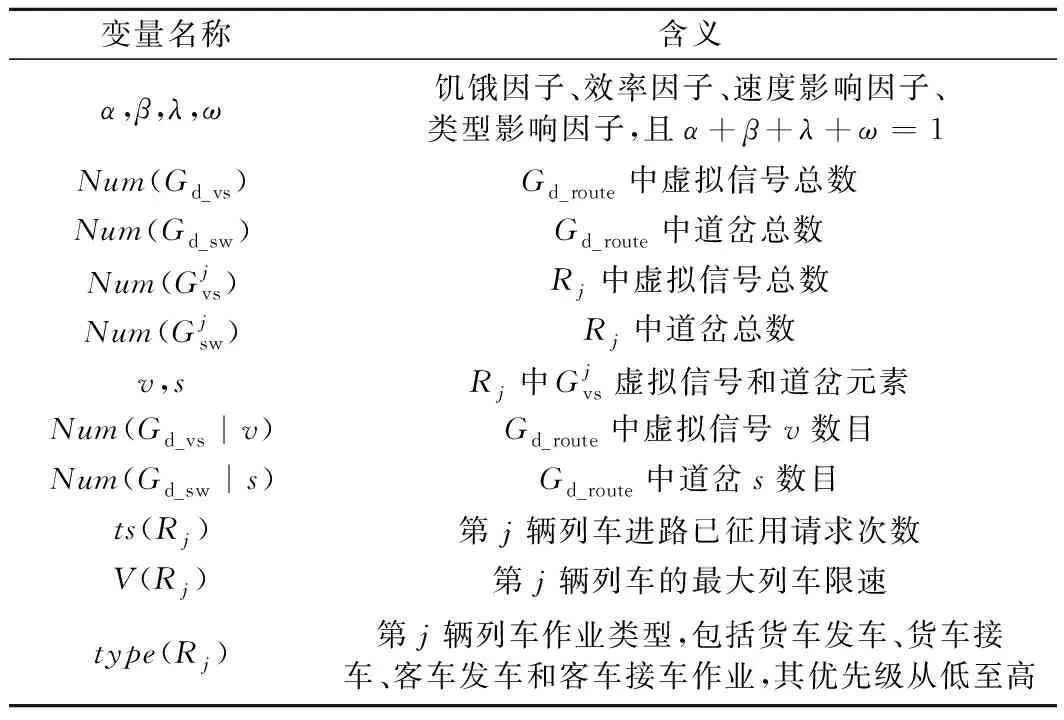
表5 进路价值函数变量含义
价值函数Value(Rj)与α×ts(Rj)成正比,若列车进行长进路作业,随着列车征用请求次数增加,相应价值函数会持续增大,符合长进路作业保障原则。
ΔT时间内,Num(Gd_vs)、Num(Gd_sw)数目一定,Rj的价值函数Value(Rj)与进路请求集中虚拟信号v、道岔s在Gd_route中重复数目成反比,即当前Gd_route中需要征用v、s重复数目越多,则说明Rj征用作业对当前站内列车作业影响程度越大,可以保证进路效率最优原则。

同理,Value(Rj)与λ×V(Rj)、w×type(Rj)成正比,在一定程度上可以保证高速列车作业优先、接车进路作业优先和客车作业优先原则。
因此,集中式OC可以依照进路价值函数值大小对Gd_route中Ri进行进路冲突资源分配,即进路价值函数可以作为进路冲突资源分配目标函数。
3.2 进路资源分配算法
根据车载中心化的列车进路资源特点,参考ODP3主协议算法和ACT技术,利用进路冲突资源分配目标函数,针对OC提出一种进路资源分配算法,其主要思想为:集中式OC将多车进路控制过程中的进路资源征用命令转化为进路资源请求集的进路可用判断、进路冲突判断和价值函数计算,从而避免多车进路控制过程中“赛跑问题”的发生。
进路可用判断即利用ACT思想,OC在进行征用之前,检测进路请求资源集中进路元素的征用情况,若进路征用资源满足征用条件,则将其置入Ga_route;若进路征用资源不满足征用条件,则OC取消征用命令并反馈给相关进路列车。
进路冲突判断即判断Ga_route中进路请求资源集中征用的进路资源是否存在冲突。对于不存在冲突的进路请求资源集,OC可以执行其征用命令而不会导致进路征用过程中的“赛跑问题”;对于存在进路冲突的进路请求资源集,如果同时执行征用命令,可能导致多车均征用失败,因此将其置入Gd_route中。
对于Gd_route中进路请求资源集,可以利用进路请求资源集的进路价值函数实现进路冲突资源分配。
对图3中的OC并行征用流程引入资源分配算法后,其征用流程见图5。
参考ODP3主协议算法,针对集中式OC的进路资源分配算法伪代码如下。
IN:Gu_route、Ga_route、Gt_route、Gd_route、Ri
OUT:征用顺序1-同时征用;2-冲突优先征用;3-拒绝征用

图5 基于资源分配算法的OC并行征用流程
1:Ga_route→∅ &Gt_route→∅ &Gd_route→∅/*将进路可用资源集、进路临时资源集、进路冲突资源集置空*/
2:while(True)do
3:InputRi→Gt_route/*输入进路请求资源集并赋值给进路临时资源集*/
4:forRi,Ri∈Gt_route/*遍历ΔT时间临时资源集*/
5: ifRi∩Gu_route≠∅ /*进路可用判断*/
6: returnRi=3 /*进路可用不满足,拒绝征用*/

图6 基于进路资源分配算法的进路资源征用CPN模型
7: elseRi→Ga_route/*进路请求资源集可用,将Ri置入进路可用资源集*/
8: endif
9:endfor
10:forRi,Ri∈Ga_route/*遍历进路可用资源集*/
11: ifRi∩(R1∪…∪Ri-1∪Ri+1…∪RN)=∅/*进路冲突判断*/
12: returnRi=1 /*进路请求不冲突,可以同时征用*/
13: elseRi→Gd_route/*进路请求资源集冲突,则将Ri置入进路冲突资源集*/
14: endif
15:endfor
16:ifGd_route≠∅ /*若进路冲突资源集合不为空*/
17:forRj,Rj∈Gd_route,calc(Value(Rj))/*计算进路价值函数*/
18:returnRj=2,Value(Rj)>Value(Rk),Rk=3,k≠j,Rk∈Gd_route/*价值函数最大的进路请求集进行冲突优先征用,其他进路请求拒绝征用*/
19:endif
20:endwhile
需要注意的是,该进路资源分配算法只适用于多车竞争一个集中式OC管辖的进路资源场景。对于传统通过进路出现资源竞争情况,可以将通过进路划分为股道接车进路和股道发车进路,再对两条进路分别利用进路资源分配算法进行冲突资源分配即可。因此,本文提出的进路资源分配算法可以应用于低密度线路中间站、会让站的任意进路控制场景。
4 算法仿真分析
4.1 进路资源征用模型修正
对图4建立的进路资源征用CPN模型,引入基于集中式OC的进路资源分配算法进行模型修正。修正后模型见图6。
图6中虚线框内引入变迁、库所和相应的弧来模拟基于OC的进路资源分配算法。由于模型中初始Token设置可以直接进行进路请求资源集的可用性检查,因此本文主要模拟进路冲突判断和进路冲突资源分配过程。
通过引入库所CJ1和CJ2来模拟OC临时资源集Gt_route和存储ΔT时间内OC接收到的进路请求资源集。引入变迁ConflictJudge,配合库所Conflict、CJ1、CJ2和相应的弧,利用Token优先级[15]实现进路资源冲突判断。若两车不存在进路冲突,则库所Conflict、Equp1、Equp2可以触发变迁NoConflict1、NoConflict2实现两车同时征用;若两车存在进路冲突,则库所Conflict、Equp1、Equp2触发变迁ResourceAllocate进行进路价值函数Value(R1)和Value(R2)计算,通过变迁Resource Allocate到库所RA1和RA2的弧函数实现冲突资源分配。其他的库所、变迁含义与修正前的模型保持一致。除此之外,在进路资源分配算法修正进路资源征用CPN模型中,变迁ConflictJudge和Resource Allocate引入算法时间函数Del4()模拟进路资源分配时间。
4.2 仿真结果分析
对进路资源分配算法修正前后模型进行1 000次仿真,统计模型列车进路资源征用成功频数、两车均未征用成功频数和对应的时间戳。征用成功时间戳统计的是征用成功相应库所Result中Token的最大时间戳,征用失败时间戳统计的是库所Result1和Result2中Token的最大时间戳。利用Matlab对所得数据进行仿真,其仿真结果见图7。
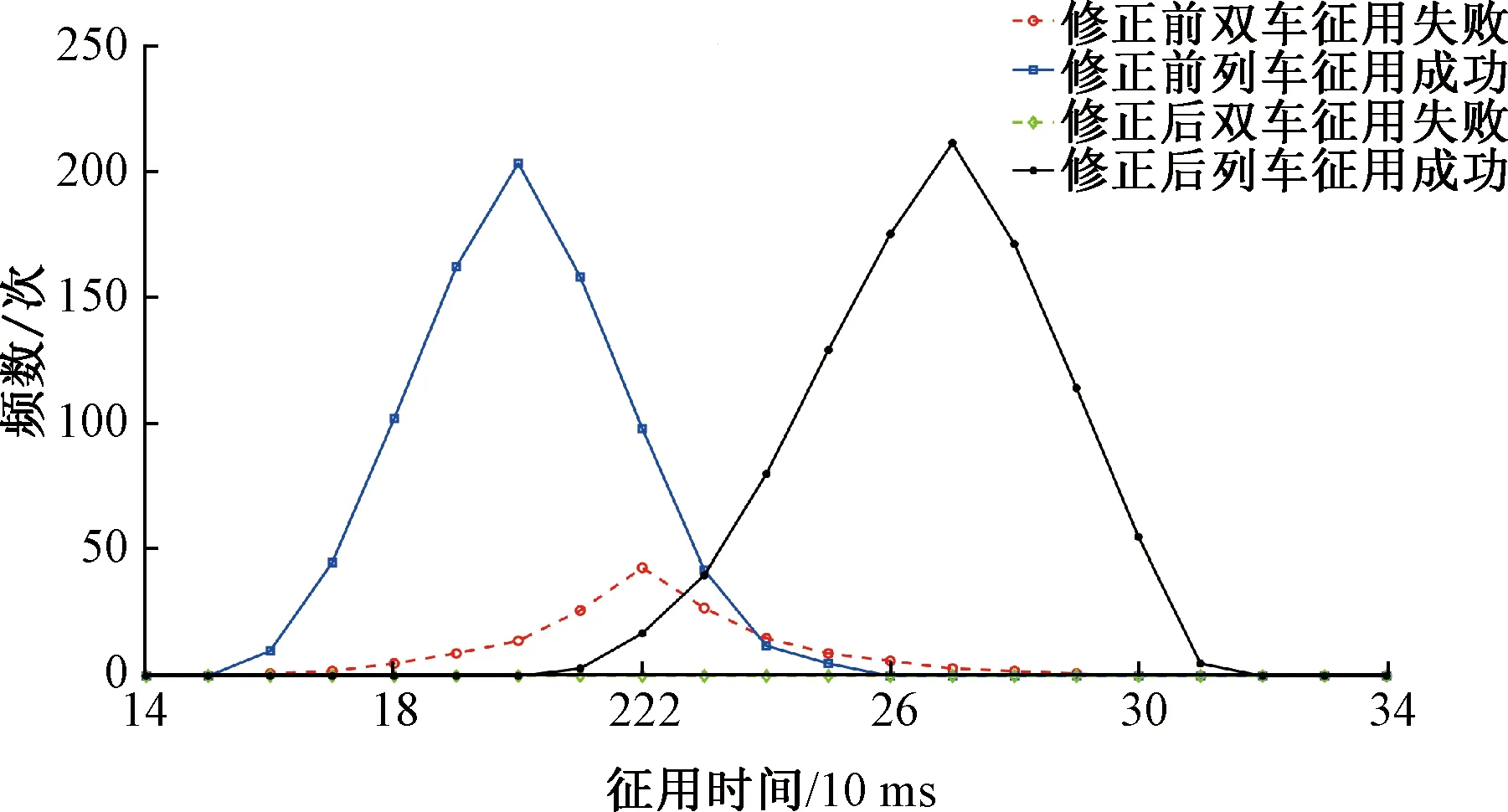
图7 模型仿真结果
由图7可以看出,基于进路资源分配算法的进路资源征用CPN模型,1 000次仿真均没有双车征用失败情况,说明经修正后的模型可以有效避免多车进路控制过程中可能出现的“赛跑问题”。统计模型修正前后的征用成功率和征用耗时数据,其结果见表6。
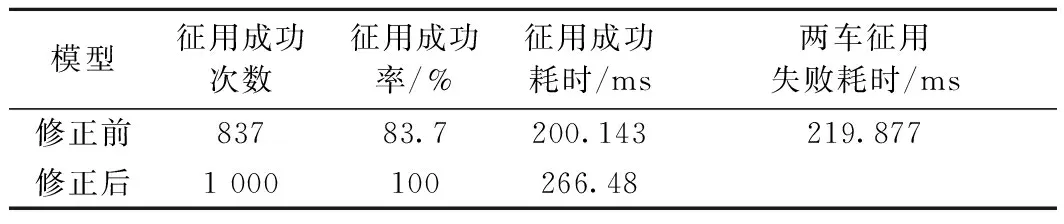
表6 模型仿真结果统计
从表6可以看出,模型修正后征用成功耗时相对于模型修正前要大,因此仅仅单纯考虑列车征用成功率是存在局限的。
在车载中心化的进路控制过程中,若列车出现进路资源征用失败情况,需要重新进行变通进路条件检查,在变通进路的虚拟区段占用检查和虚拟信号、道岔征用状态检查通过后,继续进行进路征用。进路列车进行变通进路检查除了需要占用大量的车地通信资源外,也影响站内列车作业效率。因此分析该典型场景除列车征用成功率之外还需要其他性能指标,如资源征用效率[16]RU。
RU描述的是OC临时资源集Gt_route中进路请求资源集完成进路资源征用的有效时间在完成进路征用总时间中所占的比例,即

(2)
式中:Time(i)为进路请求集Ri征用有效时间;Makespan为Gt_route中进路请求集征用总时间;Num(Gsw)、Num(Gvs)分别为列车作业道岔请求总数、虚拟信号请求总数。
为方便比较两个模型结果,简单规定若出现“赛跑问题”后需要重新进行变通进路选择条件检查,假设前次征用命令结束到再次征用命令发送的平均耗时为t;进路资源征用率RU计算时需要考虑基本进路、变通进路资源申请数目及进路资源重复数目,本文假定变通进路与基本进路资源申请数目均为N,进路资源重复数目为K;同时以征用成功耗时近似替代进路请求资源集的有效征用时间,将进路资源征用模型“赛跑问题”出现频率近似为模型“赛跑问题”的出现概率。
根据修正前后模型仿真结果和“赛跑问题”出现概率计算性能指标,见表7。

表7 进路资源分配算法应用前后模型性能指标
前次征用命令结束到再次征用命令发送需经过进路选择条件检查,因此需要进路列车与RMU、OC进行车地信息交互,本文设置的车地通信周期为300 ms,则t的取值范围为t>300 ms。当t>300 ms时,进路资源征用模型的征用平均时间大于修正的进路资源征用模型征用平均时间;同时进路资源征用模型的资源征用效率小于修正的进路资源征用模型资源征用效率。因此,通过模型仿真分析,认为该进路资源分配算法可以有效避免车载中心化的多车进路过程中的“赛跑问题”,并能够提升车载进路控制方案下的进路资源征用效率。
当然,实际多车进路控制过程中“赛跑问题”出现概率与站场进路资源竞争程度正相关,取决于较短时间内列车征用进路资源冲突数量。当站内列车作业数量较为频繁,进路资源竞争程度增大时,采用集中式OC进路资源分配算法更能体现其优越性。
5 结论
本文针对车载中心化的列控系统进行了车载中心化的进路控制方法研究,主要包括以下方面:
(1)针对车载中心化的列控系统由车载设备自主实现进路控制的需求,利用车载设备控制OC方式提出一种车载中心化的列车进路控制方法。
(2)利用有色Petri网建立进路资源征用模型,通过模型仿真分析发现多车进路控制过程中潜在的“赛跑问题”。
(3)针对集中式OC提出一种进路资源分配算法来避免多车进路控制过程中的“赛跑问题”,通过仿真分析验证其有效性,同时能够提升车载中心化的进路控制方案下列车进路资源征用效率,保证站内列车作业按照优先级顺序执行。
本文对列车进路控制方面的研究,可为下一代列控系统中联锁上车方案相关规范的制定提供一定支撑。在下一步工作中,将进行调车进路控制方法设计和进路控制性能指标评估;在低密度线路实现完备的车载进路控制方法后,会尝试将列车进路控制方法应用于CTCS标准等级线路。