兰新高铁大风区接触网正馈线舞动在线监测系统设计
2021-08-23张友鹏赵少翔赵珊鹏岳永文张宸瑞
张友鹏,赵少翔,赵珊鹏,2,岳永文,张宸瑞
(1.兰州交通大学 自动化与电气工程学院,甘肃 兰州 730070;2.兰州交通大学 光电技术与智能控制教育部重点实验室,甘肃 兰州 730070)
兰新高铁不仅是中国首条修建在高海拔地区的高速铁路,还是世界上首条穿越大风区的客运专线。线路穿越甘肃和新疆境内的风区总长度超过500 km,其中举世闻名的十五里风区、百里风区是世界内陆风力最为强劲的地区之一[1-2]。区内自然环境极其恶劣,起风速度高,风期长,最大风速可达64 m/s,瞬时破坏性大[3]。自2014年12月兰新高铁全线开通以来,小草湖西至吐哈区间内DK1448+700、DK1453+100、DK1453+300、DK1454+600接触网正馈线舞动状况严重[4-5]。正馈线是AT供电方式接触网系统中特有的线索,在兰新高铁中由于其通过绝缘子V型悬挂在支柱的田野侧,处于挡风墙后的气流加速区域内,且没有任何补偿装置,在大风作用下极易发生跨中大幅舞动现象,见图1。现场观测发现,各档内的正馈线作波浪式振动,兼有摆动,导致连接金具磨损加剧,悬挂点线索疲劳断股、掉线,导线间安全距离不足放电,接触网跳闸等故障,接触网正馈线舞动已经成为威胁兰新高铁大风区段安全运营的重要隐患。

图1 兰新高铁百里风区接触网正馈线舞动
兰新高铁接触网正馈线的舞动是一种低频率(0.1~3 Hz)、大振幅(约为导线直径的5~300倍)的自激振动[6]。传统模式下对接触网正馈线的监测只能依赖人工巡检,工作效率低,浪费大量人力物力。因此,通过对大风区段接触网正馈线舞动在线监测系统的研究,一方面能够实时获取现场舞动数据,为大幅度舞动可能造成的危害提出预警;另一方面也为大风地区接触网正馈线舞动特性的研究提供第一手数据资料,这对保障兰新高铁乃至其他大风地区铁路的运营安全都有着极其重要的意义。
国内外学者自20世纪30年代以来开始对导线舞动机理进行大量的试验和理论探索,先后提出了多种导线舞动在线监测的方法。王少华等[7]利用计算机三维模拟技术实现了对导线起舞过程的认知和相关重要参数的获取,但难以建立全线通用的数学模型,灵活性欠佳;Ren等[8-9]提出的视频图像监测法虽较为直观,但只能定性地描述导线的舞动状态,难以获得精准的舞动信息;Mahajan等[10-11]采用导线舞动GPS定位法,通过实时接收卫星导航电文信号与载波相位信息,计算获得导线舞动幅度值。该方法虽然在舞动监测的效率上有所突破,但GPS定位系统基站的修建、维护耗资大,成本过高;张旭萍等[12]利用光纤光栅测量技术对导线舞动状况进行评估,该方法具有测量精度高、抗电磁干扰强和数据传输稳定的优点,但光纤需要与导线进行绞合,工程量过大,实际操作困难。近年来,无线传感器网络(Wireless Sensor Network,WSN)技术的迅速发展,为大风区接触网正馈线舞动监测提供了一种新思路。应用自动化、信息化的在线监测系统对风季正馈线的状态进行实时监测,可以大幅提高正常巡视和事故抢修的快速反应能力,有利于加强整个接触网系统的运营维护,提高铁路智能化管理水平。
1 在线监测系统设计思路
1.1 正馈线舞动轨迹
为了抵御风沙对列车运行的侵害,在兰新高铁沿线建设了挡风墙。但挡风墙“防车不防网”,反而对接触网正馈线周围的流场产生了严重影响,是导致正馈线舞动的主要原因。根据大量观测资料可知,在大风作用下,正馈线的舞动是一种渐进、受限的自激振动。风力较小时,正馈线在平衡位置附近做小幅摆动,随着风能的累积与空气负阻尼的影响,正馈线振幅在水平方向上逐渐减小,在竖直方向上逐渐增大。在垂直于导线轴线截面内,形成斜椭圆轨迹,并在阻尼的影响下最终逐渐趋于稳定,正馈线1阶舞动轨迹示意见图2。

图2 正馈线舞动轨迹示意图
1.2 兰新高铁接触网结构分析
兰新高铁接触网正馈线的基本结构是依靠支柱逐级承载导线,每档跨距设计为50.0 m,支柱高度为12.0 m,路基高度为2.0 m,正馈线距离路基的高度为7.2 m,挡风墙高度范围在3.5~4.0 m之间,线路整体分布极有规律。
相比于接触悬挂,正馈线的结构相对简单和独立,为了获取正馈线的舞动状态,可以选择一个档距内的正馈线作为监测对象,安装适当数量的微型监测终端,实时采集监测点的舞动信息。由于相邻支柱沿铁路线路呈线型排列,中间无障碍物遮挡,又为无线数据的传送提供了良好的条件。通过构建短距离、低功耗无线通信网络将舞动信息传输至计算机监控中心进行处理和显示。
1.3 舞动监测原理
本文选择兰新高铁接触网正馈线舞动的幅值、频率作为主要监测参量,既是基于铁路现场的客观需求,又满足了正馈线舞动理论及防舞技术研究的内在需要。一方面由于舞动发生时,铁路运维部门最直接关注的是其幅值和频率的变化;另一方面利用幅值和频率不仅可以得出舞动过程中导线张力的变化,评估正馈线的疲劳状况,还可以通过幅值和频率反映线路防舞装置的有效性,为正馈线舞动特性及防舞技术的研究提供数据支持。
舞动是振动的一种形式,在工程应用中由于加速度传感器具有可靠性高、结构小巧、抗干扰能力强、价格低廉等优点,常选用其直接获得加速度信号以实现对设备振动信号的监测。通过在兰新高铁正馈线上安装加速度传感器实时采集监测点加速度信息,2次积分后利用监测点位移信息拟合整体舞动轨迹,正馈线舞动监测点运动示意图见图3。

图3 正馈线舞动监测点运动示意图
如图3所示,当舞动发生时,监测点从原点运动到p点,变化的位移为op,在三个轴向的投影分别为Lx、Ly、Lz。op与x、y、z轴的夹角分别为Ax、Ay、Az。
则监测点移动的位移为
(1)
op与x轴的夹角
(2)
op与y轴的夹角
(3)
op与z轴的夹角
(4)
设ai、vi、si分别表示舞动监测点第i时刻的加速度、速度、位移,Δt为采样时间间隔,则有
(5)
第i时刻的相对位移为

(6)
由此,可以推导出第N时刻运动对象的位移为

(7)
根据以上算法,只需获取加速度传感器x、y、z三轴的加速度值,2次积分后便可获得对应轴向的位移量与摆动的倾角,进而拟合出监测点的运动轨迹,实现对导线舞动状态的定量分析。
2 舞动在线监测系统的设计
2.1 监测系统整体结构
基于上述设计思想,本文遵循尽量不改动或者少改动现有接触网结构的原则,提出一种分布式异构无线传感器网络的接触网正馈线舞动多点在线监测系统,系统总体设计方案见图4。

图4 舞动监测系统总体设计方案框图
系统运行时,ZigBee网络中的协调器起着基站节点的作用,首先建立起一个网状网络,监测节点作为终端设备加入网络。监控中心主机通过GPRS向协调器发送查询/控制命令,协调器再利用ZigBee网络以广播的方式向监测终端转发此命令帧。终端休眠被唤醒后,开始采集舞动加速度数据。而在反向数据传输过程中,因为协调器的网络地址不变,监测终端可以直接采用单播的方式向其转发在线监测数据。协调器收到响应数据包后,又通过GPRS把数据发送到监控中心主机进行分析处理。在整个监测网络中只有协调器与计算机监控中心连接,节省了通信开销,降低了系统开发与运行的成本,可以实现对正馈线舞动状态最直接有效的监测。
2.2 监测节点硬件设计
在监测系统中,终端节点负责采集并传输舞动监测点处x、y、z三轴的加速度分量信息。主要由传感器模块、无线传输模块、供电单元、电源监测、指示电路组成,见图5。

图5 无线加速度传感器节点框图
三轴加速度传感器采用Freescale公司生产的MMA8451,它是一款高精度、低功耗、全数字的三轴加速度传感,测量量程为±8g(g为重力加速度),分辨率为14 bit。作为数字信号输出的传感器,与传统输出模拟信号的传感器相比,无需添加额外的A/D转换电路,降低了外界干扰,提高了传感系统的电磁兼容性[13-14]。传感器内部集成有滤波器,大大简化了外围电路设计,在舞动监测时可快速做出反应。主控芯片CC2530将MMA8451测量得到的数据通过ZigBee无线网络传送到协调器。其中,为了增加无线传输距离,减小能耗,监测终端安装在接触网正馈线上,每个监测终端都配备了高增益的外部天线,加强了无线信号传输的质量与距离。
在监测节点的电源设计方面,终端节点采用3.7 V的锂离子电池供电,硬件工作电压为3.3 V,利用HT7533稳压芯片对其做降压处理。MMA8451睡眠状态时电流损耗仅为6 μA,工作时再由中断信号唤醒,大幅节省了电量,适用于监测系统野外供电条件受限的工作特点[15]。
在ZigBee网络中,协调器由于承担了较多的数据采集、转发的任务,电能消耗大。铁路部门为了接触网及列车运行安全,规定所有监测装置禁止从接触网高压导线上取电,而频繁的电池更换又比较困难,因此,安装在支柱上的基站节点采用太阳能加蓄电池的供电方式,协调器供电结构见图6。

图6 协调器供电结构图
2.3 监测节点软件设计
终端节点通电后首先进行系统初始化,令1ogicalType=ZG_DEVICETYPE_ENDDEVICE,调用函数ZD0_Start()申请加入协调器已组建的ZigBee网络中。但在终端节点成功入网之前,协调器必须与传感器节点绑定后才能获得它的PAN ID(网络标识符)[16]。终端通过调用zb_Bind_DeviceRequest()函数向ZigBee网络中的协调器节点发出绑定请求,并利用zb_AllowBindResponse()函数对配对请求结果做出响应。协调器收到绑定请求后,若网络中终端节点容量尚有空余,则执行zb_BindDevice(TRUE, clusterID, NULL)函数与终端传感器节点发生关联。绑定成功后建立绑定表,绑定表中的簇标识符(Clusted ID)值相等,属性相反,协调器正是通过Clusted ID获取传感器节点的PAN ID,之后终端节点开始工作并执行zb_sendDataReques()函数,向协调器周期性地发送舞动监测点加速度信息,终端节点软件工作流程见图7。

图7 终端节点工作流程图
ZigBee中的协调器在绑定监测终端时采用的是分布式节点地址分配机制,见下式
An=Ax+Cs(d)×(n-1)+1
(8)
式中:An为与协调器相关联的第n个终端节点的地址;Ax为协调器地址;1≤n≤Cmax,Cmax为一个协调器所能涵盖的最多终端节点的个数;Cs(d)代表在网络深度为d处协调器所拥有的地址数,其计算式为
(9)

在线路的组网方面,ZigBee是基于IEEE 802.15.4标准的低功耗、低复杂度、低成本的局域网协议。其采用直接序列扩频(Direct Sequence Spread Spectrum,DSSS)技术,是一种抗干扰性强、保密性和可靠性都很高的通信方式。由于扩频技术在正常通信时所要求的信噪比很低,即使电磁干扰很强的情况下,仍可以正常工作。
2.4 监测终端的布置设计
舞动监测终端位于接触网正馈线上,整体呈链型分布。由于监测终端采用电池供电,在传感器感知范围内,如果对终端进行均匀部署,各个节点因传感量、信息处理量和通信量的不同,将导致能耗不同。越靠近协调器节点耗能量越大,死亡时间越早,监测网络寿命随之缩短。
本文使用冗余节点的非均匀部署策略,即在靠近协调器的区域布置较多终端节点,解决离协调器远的节点因转发数据量轻,能量消耗少;离协调器近的节点因转发数据量重,能量消耗多带来的能耗不均衡问题。使网络中各区域的节点尽可能同时消耗完能量,从而使监测系统生命周期得到最大限度的延长。在一段长为L的线路上n个终端节点布置方法见图8。

图8 无线监测终端节点布置
3 监测终端的安装及系统抗干扰分析
3.1 终端结构设计
本文考虑监测系统工作特点,设计了一种结构更加合理的新型舞动监测终端,其结构组成见图9。终端整体呈椭球状,椭球的长轴与正馈线走势重合,短轴垂直于导线,相比于同体积的圆球状外形,椭球状设计对于导线的舞动状态影响相对较小。终端外壳下半球体采用具有电磁屏蔽效果的轻质金属材料,实现电磁屏蔽,保障内部电路板的正常工作不受外界强电干扰。上半球体采用材质较轻,硬度良好的有机透明材料,既可以降低整个监测终端的质量,减小对正馈线力学特性的影响,又可在不对其拆卸的情况下一定程度上观测到终端内部情况,便于运营维护。监测终端的天线在下半壳体的电磁屏蔽区域之外,又在整个上半壳体的保护区域之中,既不影响无线信号的传输,又为天线提供了防水、防尘和免剐蹭的工作环境。

图9 监测终端安装示意
在该系统中,终端节点运行在正馈线上,可运用法拉第笼的原理实现工作接地。为了平衡终端节点的工作电压与正馈线上电压差,将印刷电路板的地线与终端节点的屏蔽层连接起来,使屏蔽层、电路板和导线构成了一个等电位体,终端的地线与正馈线相接,有效避免了线上的高电压进入电路板,实现了节点与线路电压的等电位。
3.2 监测系统的抗干扰分析
兰新高铁采用单相工频交流供电制式,接触网额定电压为27.5 kV,属于高压线路环境。接触网系统在空间产生的电磁场干扰可能会导致无线传感器网络运行异常、死机等现象[19]。因此,在线监测系统必须有较强的电磁兼容性。
接触网对无线通信的干扰分为有源干扰和无源干扰。有源干扰主要是由导线及金具表面放电和绝缘子局部场强过高引起电晕放电发生。电晕放电的单个脉冲很窄,宽度在0.1 ps量级,脉冲群的持续时间约为2~3 ms。根据大量测试结果统计得出:不同电压下的电晕放电辐射频率主要集中在20~40 MHz附近,在兆赫兹以上的频率点,电晕噪声电平显著降低。接触网系统电晕对无线信号的干扰主要是对无线接收机的中波段534~1 605 kHz内的干扰。无源干扰是无线信号遇到金属导线后因电磁感应而形成的散射和屏蔽作用,其频率范围略微大于30 MHz[20]。
本文中用于监测节点间通信的ZigBee网络工作在2.4 GHz频段,无线干扰水平会随着频率的增加而急剧衰减。系统软件运行过程中,运用了Watchdog技术解决脉冲尖峰的干扰带来的“飞程序”现象,保证软件的正常运行。
4 系统测试与分析
为了测试基于WSN的接触网正馈线舞动在线监测系统的可行性与有效性,在实验室环境下搭建了试验测试平台,对监测系统处于静止和动态状况下分别作了相应的性能测试。
4.1 系统可靠性测试
基于IAR Embedded Workbench集成开发环境和Z-Stack-CC2530-2.5.1a协议栈,将程序下载到ZigBee网络的协调器和终端节点中。打开电源开关,ZigBee网络组建成功后,监测终端加入网络。协调器在5 s内完成组网,终端入网时间约为2 s,协调器节点的PAN ID为0x0000,终端节点的PAN ID为0x12C7。将终端节点正面水平静止放置在试验台上,以50 Hz的采样频率连续采集1 000组数据点,经ZigBee网络将数据转发至协调器,协调器通过串口把数据同步显示到计算机。利用Matab对监测终端静止状态下输出的加速度数据进行显示,见图10。

图10 终端节点静态加速度输出数据
MMA8451传感器正面水平静止放置时,x、y、z三个轴向的理想输出值分别为0.000 0g、0.000 0g、1.000 0g,且初始偏置误差允许范围是±0.100 0g。对1 000组静态输出数据进行分析处理,求其均值和标准差,见表1。比较后得出终端节点采集到的数据在任一轴向的初始偏置误差均在±0.050 0g以内,在允许误差范围内。
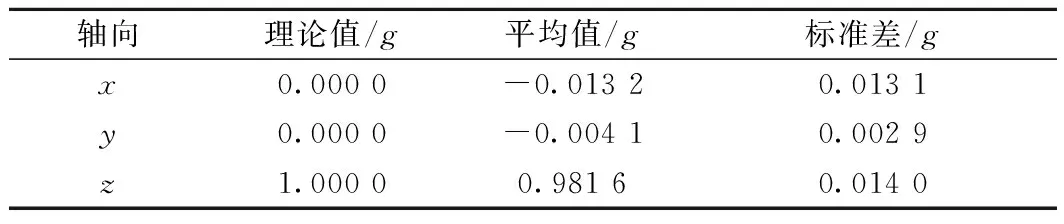
表1 MMA8451静止放置实测数据
为了进一步测试系统远距离通信性能,同时进行了无线通信丢包率和误码率的测试。通过软件设定,使用ZigBee网络的19号信道进行测试,该信道的主频率为2.445 GHz。在户外开阔环境中,协调器以查询的方式向处于同一位置的终端节点分别以1、10、20、30、50 m的距离进行通信,利用TI公司的SmartRF Studio7软件进行测试,多次试验后测试结果见表2。随着距离的增加,虽然设备的丢包率和误码率均有所增大,但通信网络仍然可以保持稳定,满足在线监测的应用需求。

表2 ZigBee通信性能测试
由表2可见,本文构建的ZigBee无线传感器网络监测系统所用传感器误差小,工作性能稳定,各项通信指标均能达到在线监测要求,可以实时精确地采集、传输加速度信号。
4.2 接触网正馈线舞动模拟测试
基于实验室环境搭建了正馈线舞动模拟试验平台。在一段导线上部署4个监测终端配合1个协调器构建舞动在线监测网络。
导线模拟兰新高铁接触网正馈线的舞动形式,以该线索中间节点的数据输出为例,连续采集1 000组数据点,在Matlab中的仿真波形见图11,经离散傅里叶变换后得到频谱图,见图12。由图12可知,模拟的舞动信号频率主要集中在1.5 Hz左右,在实际舞动频率0.1~3 Hz的范围之内,表明模拟的正馈线舞动趋势与实际相符。
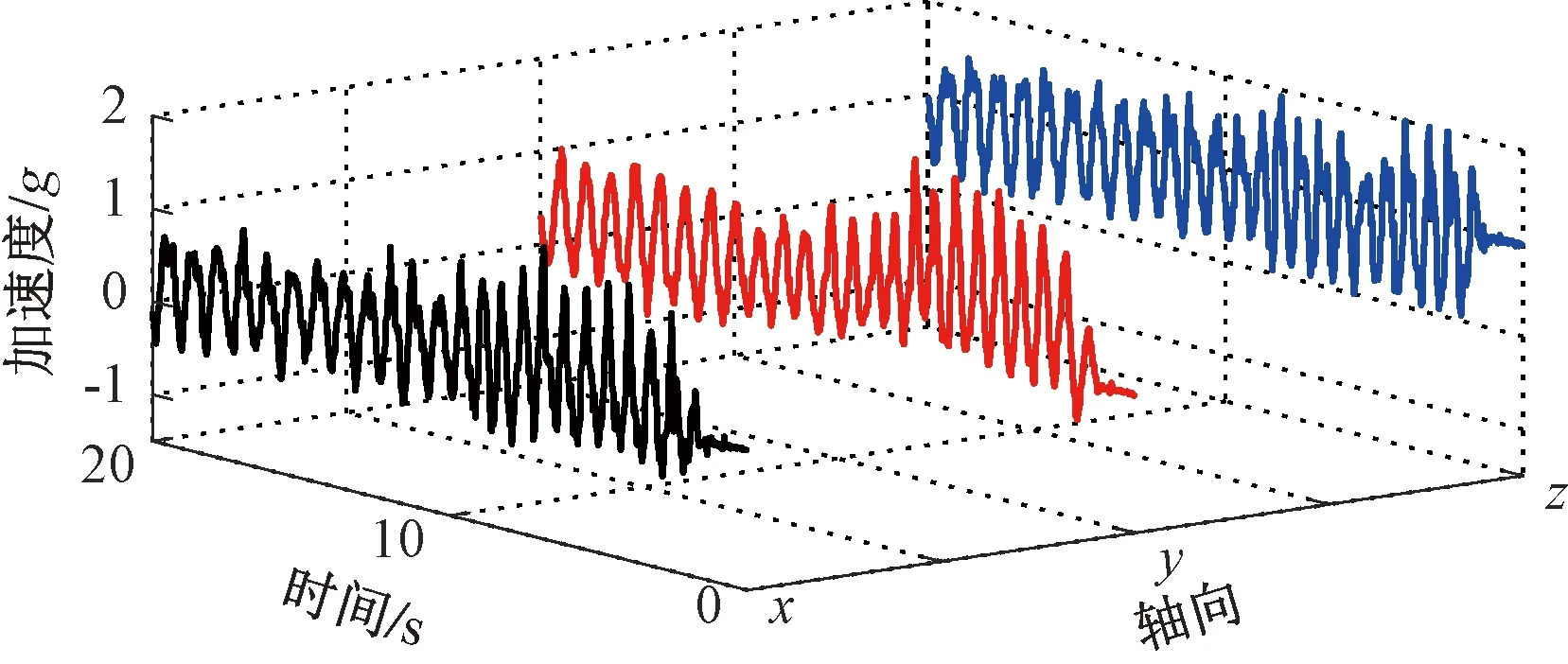
图11 终端节点加速度输出数据

图12 加速度输出数据频谱
在线监测系统工作在野外特殊环境中,测量结果不可避免地受零点漂移、高频噪声等误差的影响,即使在时域内对数据做了积分基线标定、滤波等预处理,信号中夹杂的干扰项也很难消除,且因不定积分所产生的趋势项,会使位移曲线产生较大漂移。因此,本文采用频域积分法去除误差干扰。
(1) 频域滤波
频域滤波是对时域采样信号进行离散傅里叶变换得到频谱图,根据滤波要求把需要滤除的频率部分置零后再进行离散傅里叶逆变换恢复时域信号。
设舞动信号为{x(k)}(k=0,1,2,…,N),数字滤波的频域表达式为
(10)
带通滤波器的频域响应函数为
(11)
式中:fd、fu分别为下限、上限截止频率;X(k)为x(k)的傅里叶变换;Δf为频率分辨率。
(2) 频域积分
一次积分的数值计算式为
(12)
二次积分的数值计算式为
(13)
在频率积分过程中,本文引入了积分精度控制方程来保证积分精度[21-22]。根据频域积分及校正原理,校正后的加速度au(t)、速度vu(t)、位移su(t)分别为
(14)
(15)

(16)

(17)
(18)
(19)
(20)

(21)
(22)
该算法可以对fT附近的信息进行保留,对远离fT的超低频信息进行大幅度衰减,达到了既合理保存有效信息,又兼顾考虑趋势项误差控制的目的。经大量仿真实验发现,αT取值越小,信号中低频信息衰减程度越大,趋势项误差抑制作用越明显,但如果αT取值过低,会导致输入信号幅值过衰减。所以,在进行积分精度αT取值时,应根据舞动信号中低频噪声程度及在控制趋势项误差的基础上选较大值(推荐0.92~0.99),可以充分保留信号中的有效信息。本文根据正馈线舞动信号大幅值、低频率的实际特性,αT的值选择0.95。
根据上述原理,在频域中把需要滤除的频率部分设置为零后加速度仿真波形见图13,此时信号频谱见图14。利用频域积分,对预处理后的数据二次积分得到三个轴向的位移输出波形,见图15,倾角变化输出见图16。由倾角输出可知,传感器输出的x、y、z轴的初始倾角分别为90°、90°、0°,因为重力加速度垂直向下,所以传感器倾角变化符合实际情况,舞动在线监测结果正确。

图13 频域滤波后加速度输出

图14 频域滤波后加速度频谱

图15 终端节点位移输出

图16 终端节点三轴倾角输出
根据最小二乘法原理,在垂直于正馈线轴线的截面内拟合2号节点的运动轨迹,见图17,在三维空间中运动轨迹见图18。由图17可见,正馈线在垂直于导线轴线截面内的舞动轨迹近似为斜椭圆形,与现场实际观测轨迹相符。在图18中,舞动监测点在空间中的运动轨迹与监测点x、y、z轴输出的分量结果相比,图形的整体趋势以及水平、垂直的运动幅值均有较好的重合度。因此,本文设计的兰新高铁大风区段接触网正馈线舞动在线监测系统是有效可行的。
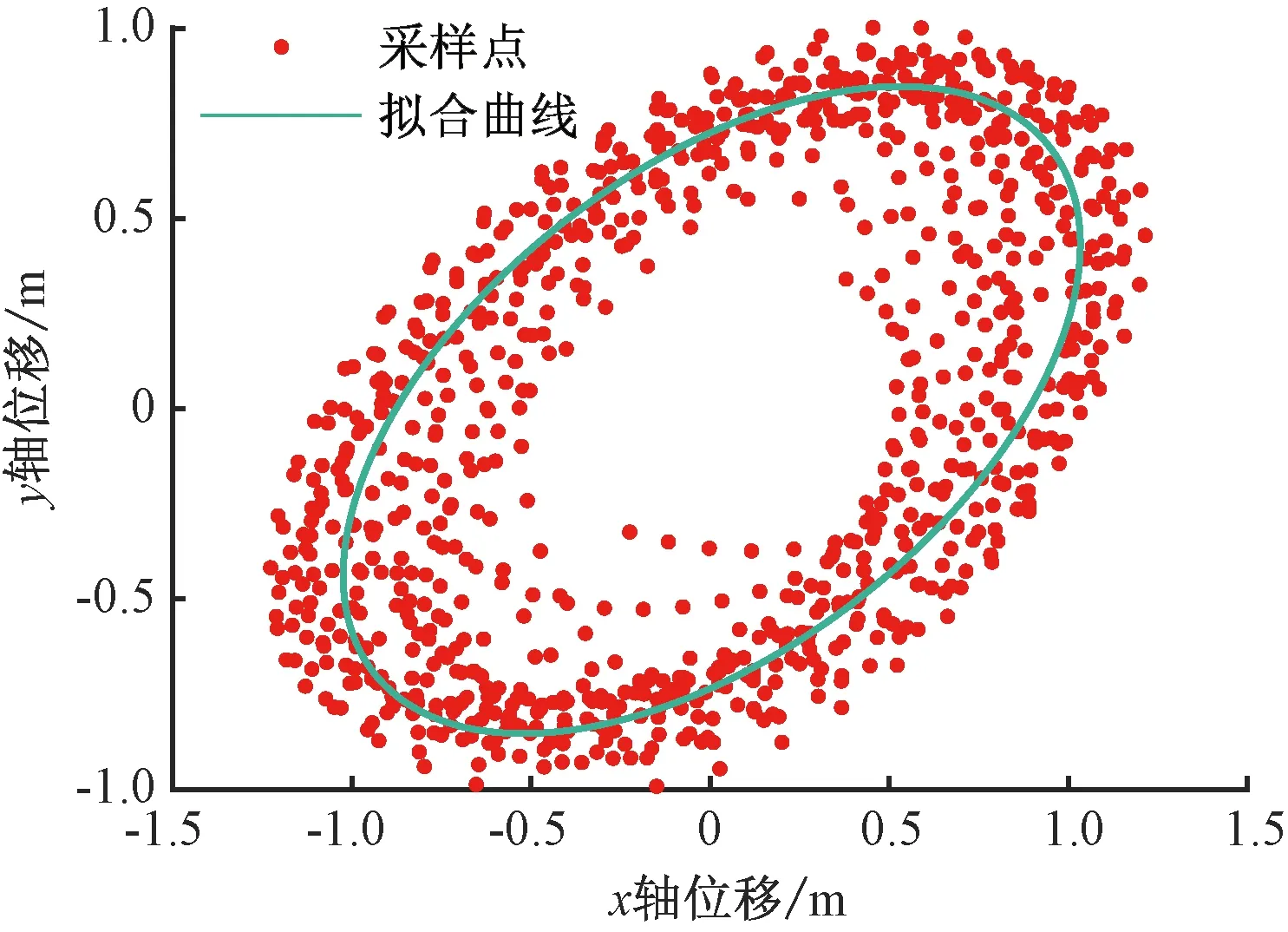
图17 最小二乘法拟合监测点椭圆运动曲线

图18 监测点三维空间舞动趋势
5 结论
本文在详细分析兰新高铁大风区接触网正馈线的结构布局以及监测需求的基础上,设计了一种基于WSN的分布式舞动在线监测系统,为正馈线状态的在线监测提供了一种新思路。
(1) 以无线射频芯片CC2530、三轴加速度传感器MMA8451为核心,通过移植Z-Stack协议栈实现了无线三轴加速度传感器网络中舞动监测终端的软、硬件设计,解决了现场应用所面临的传输方式,节点的安装、布置、供电以及定位算法等关键问题。
(2) 在实验室环境下,测得无线传感器网络通信性能工作稳定,具有较高的测量精度和较低的传输误差,可以实时准确监测导线舞动轨迹。
(3) 本系统动态性好,设备体积小,对正馈线力学特性影响低,能够满足在线监测系统长期运行在野外的需求。系统不仅可以为大风地区接触网正馈线舞动特性的研究提供数据支撑,更有助于提升电气化铁路接触网的运维水平。