基于自编码器的接触网定位器底座开口销缺失识别算法研究
2021-08-20于博轩
于博轩
(中车工业研究院有限公司,北京 100070)
1 引言
作为一种大运量、经济型交通工具,铁路在我国的经济生活中占有重要的地位,为我国经济社会发展做出了巨大贡献。2019年我国铁路营业里程超过13.9万 km,其中电气化里程10.0万km,电气化率为71.9%。电气化铁路的快速发展对接触网检测提出了更高要求。
电器化铁路接触网由接触悬挂、定位装置、支持装置、支柱等部分组成,是电气化铁路的重要组成部分。其中,接触网定位装置由定位管、定位器、定位线夹及其连接零件组成,用于将接触网悬挂定位在设计的空间范围内,使其满足受电弓取流的几何要求。接触网的露天架设,导致接触网定位装置在外部环境以及自身寿命的影响下出现部件松动、断裂、小部件缺失等问题,而一旦定位器底座开口销缺失,将带来重大安全隐患,因此,如何及时发现定位器底座开口销缺失是急需解决的技术难题。
2 接触网悬挂状态检测系统
接触网悬挂状态检测系统是一种包含了图像处理技术、动态拍摄技术、激光摄像技术、数据库技术的成像检测系统。该系统搭载于接触网作业车或专用车辆上,随车辆行驶过程自动识别接触网支持装置并通过图像抓拍技术获得接触网悬挂状态图像,所拍摄的图像能够有效呈现接触网支持装置、附加悬挂、接触悬挂及吊柱座区域零部件的技术状态。数据处理分析模块采用图像稳定技术对高清相机采集的图片进行处理,得到高分辨率图像。该高分辨率的图像一方面可以分辨出悬挂装置出现的松动、脱落、断裂等故障,另一方面可以提供公里标、杆号、站区等综合信息用于定位。
本文采用的接触网悬挂状态检测系统硬件结构由刚性接触网成像模块(包括定位点刚性悬挂成像模块、刚性悬挂高位吊柱座成像模块、连续视频录像模块)、柔性接触网成像模块(包括定位装置及支持装置成像模块、附加悬挂成像模块、杆号成像模块、接触悬挂成像模块)、嵌入式触发控制模块、时空同步定位模块、支吊柱/定位点识别模块、补偿光源模块、车地传输模块、显示与操作模块、数据处理分析模块等组成,如图 1所示。
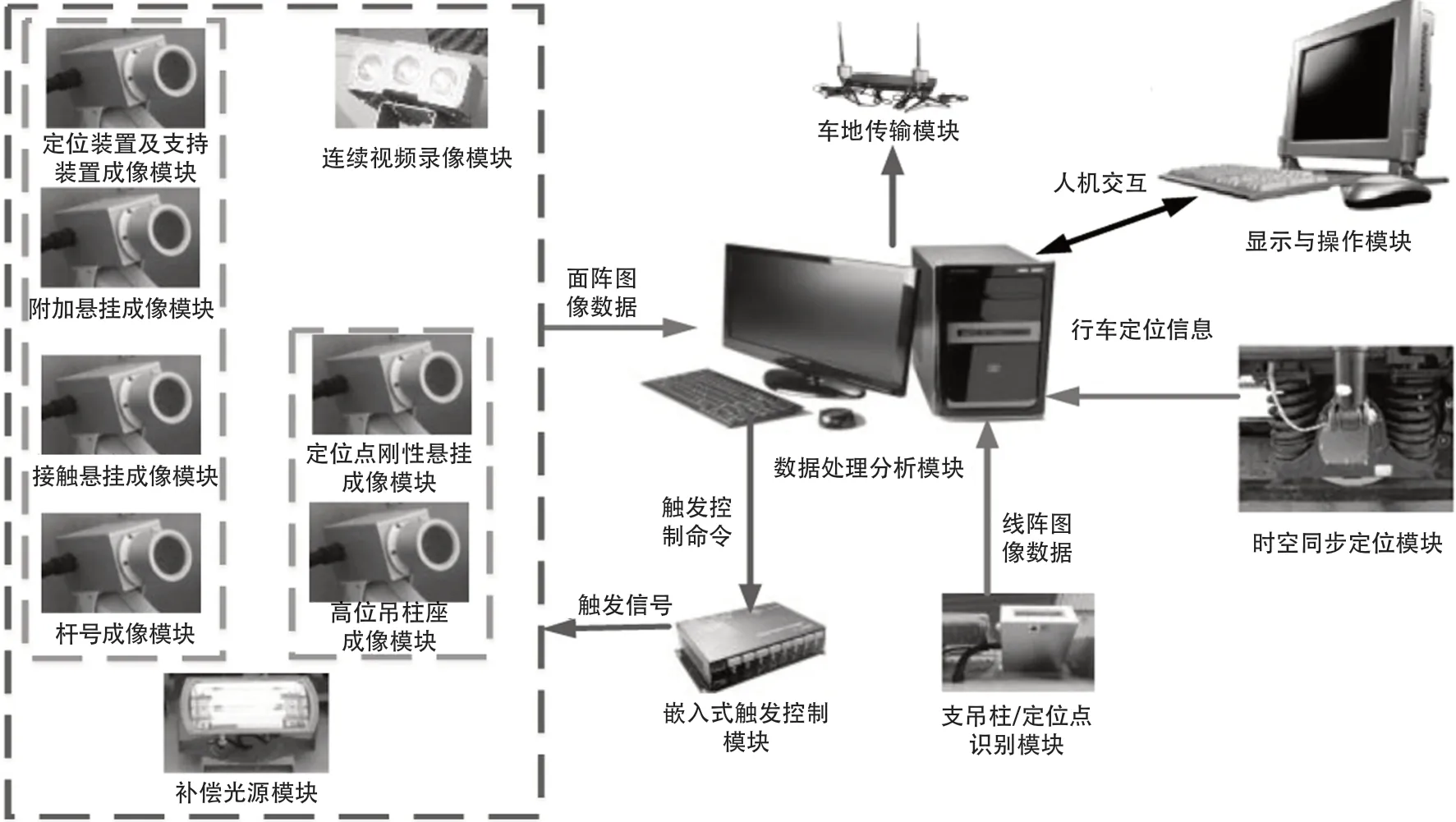
图1 接触网检测系统构成
3 定位器底座区域定位算法
在每张接触网检测图像中,接触网定位器底座区域图像只占到接触网检测图像中2 900万像素图像的很小一块面积,为准确定位并获得定位器底座区域图像数据,提高定位器底座开口销缺失检测效率,本文采用归一化互相关模板匹配(NCC)算法,该算法既支持线阵连续图像数据,也支持面阵图像数据。
NCC算法是一种基于统计学且取值范围在[-1,1]之间的算法,常被用来比较2幅图像的相似程度,也就是图像的相关性。对图像来说,每个像素点都可以看作是1个样本数据子集,这样整幅图像就构成了1个样本数据合集。如果该合集中的1个子集与另外1个样本数据中的某个子集出现匹配的情况,则它的NCC值为1,表示相似度极高,反之,如果NCC的值为-1,则表示完全不相关。基于该理论,NCC算法可以表示如下:
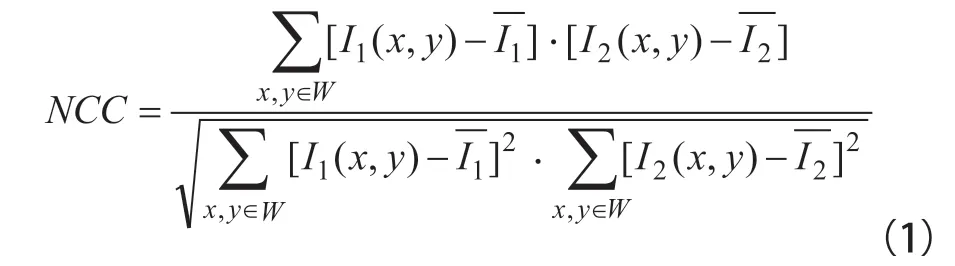
式(1)中,W为在待匹配像素位置构建的邻域窗口;I1(x,y)为模板图像像素值;I2(x,y)为搜索子图像素值。
NCC算法优点是抗白噪声干扰能力强,且在灰度变化及几何畸变不大的情况下精度很高,计算结果有固定的范围[-1,1],方便设置检测阈值。
4 定位器底座开口销区域特征提取
采用NCC算法定位出定位器底座区域后,本文通过递进式的销钉区域识别和开口销识别实现开口销缺失的智能判别,首先从定位器底座图像中识别出销钉目标,再根据销钉区域图像识别开口销是否缺失。为使不同场景下的开口销缺失识别效果最优化,需要事先通过自编码器(AE)进行定位器开口销区域数据采集,采集不同场景、不同光照、不同尺寸条件下的定位器底座图像、开口销图像和销钉图像。其中,不同场景指白天和野外,不同光照指图像曝光偏暗、图像过曝等,不同尺寸涵盖接触网检测常见的1 600万像素、2 000万像素、2 900万像素图像。本文最终目的是智能识别开口销是否缺失,对于开口销销钉状态图像采集需要尽量满足多样性,如果采集的销钉状态图像多样性过少,识别正确率会降低。因此,销钉状态图像需要涵盖销钉掰开的不同程度、销钉的不同朝向、销钉的不同新旧程度等。
自编码器是一类在半监督学习和非监督学习中使用的人工神经网络,其功能是通过将输入信息作为学习目标,对输入信息进行表征学习。令输入层向量为x,通过自编码器后的输出层向量为x',但输出层向量x'和自身输入层向量x之间仍然存在一定的差异。自编码器也是一种有损压缩,可通过损失函数最小来实现x'近似于x的值。基本的自编码器是一种包含数据输入层、隐藏层、输出层3层的神经网络模型。自编码器包含编码过程和解码过程,从输入层到隐藏层为编码过程,从隐藏层到输出层为解码过程。自编码器就是将原始数据进行编码,降低维度,发现数据之间规律的过程。3层自编码神经网络的模型如图2所示。
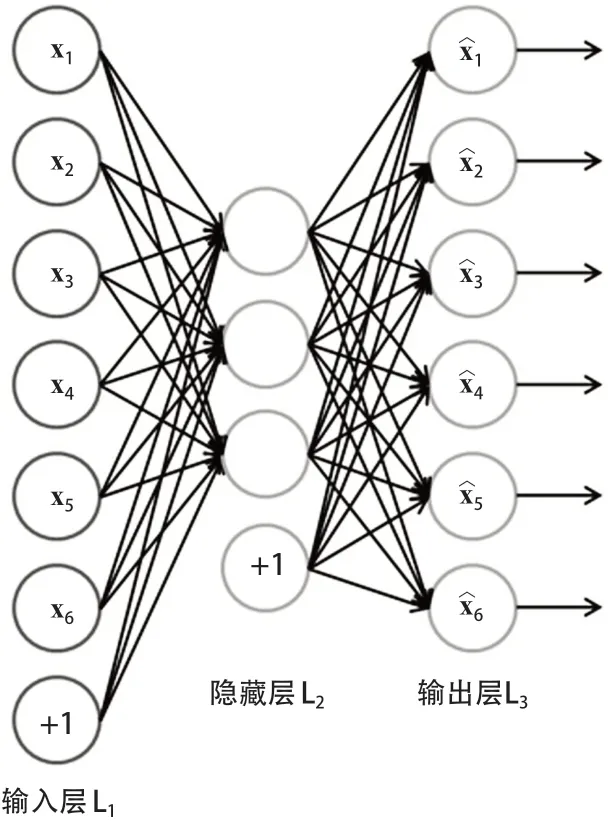
图2 3层自编码神经网络模型
自编码器特征提取算法包括2个过程,输入层—隐藏层h的编码过程,如式(2)所示:

式(2)中,δe为编码函数,W1,b1为编码的权重和偏置。
隐藏层—输出层的解码过程,如式(3)所示:

式(3)中,δd为解码函数,W2、b2为解码的权重和偏置。
编码、解码之间的压缩损失JE( W,b)是:

式(4)中, W、b为整个自编码器网络的权重和偏置,r表示训练集中的样本序号,m表示训练集的样本总数。
由于开口销状态各异,且采集图像背景复杂多变,实践中发现采用灰度梯度直方图特征(HOG)、局部二值模式特征(LBP)等传统方法提取图像特征的识别效果不够理想。因此,采用自编码器自动提取图像特征,使用BP神经网络算法进行训练,使其输入值等于输出值,对输入的定位装置底座区域图像进行降维处理。实际网络中,网络输入层L1为图像数据,考虑到开口销销钉的尺寸特点,输入层L1采用70×70的神经元数量,隐藏层L2神经元数量设置为 1 000,输出层神经元数量和输入层L1一样也为70×70。
具体做法是,首先收集5~10万各种场景下不同形态的开口销样本图像,并缩放图像尺寸为70×70;然后采用开口销样本图像训练自编码器网络;最后输入待识别的定位装置底座区域图像至训练好的自编码器,提取隐藏层的1 000维数据作为开口销特征,送入支持向量机(SVM)进行开口销缺失识别。
5 定位器底座开口销缺失识别
定位器底座开口销缺失识别可通过支持向量机SVM实现。对于已经得到了的带标签的训练数据(即其 中为自编码器提取的1 000维特征,yi为开口销是否缺失类别标签,i= 1~M),现在需要1个超平面将这些特征数据分为正常开口销和开口销缺失2类,假设该超平面函数为为M维向量的转置,b为实数),当 0 时,x位于超平面上,的点对应yi= +1的数据点,的点对应yi= -1的数据点,为此设:
根据支持向量机(SVM)的推导过程,可得到如下模型公式:
式(6)对于线性可分的任务通常有较好的效果,但是用于开口销缺失分类的特征数据较为复杂,该线性模型已经不能适应。因此,根据支持向量机(SVM)理论,将输入数据映射到高维空间,使其在该空间中尽量线性可分,故上述模型的约束条件可写为:

式(7)中,φ是输入数据映射到高维空间的映射函数。
该模型直接求解非常困难,目前基本都是通过优化其对偶问题来求解,其对偶问题可通过拉格朗日乘子和对偶定理进行推导,这里不做详细阐述。在其对偶模型中,涉及到的向量内积计算为另一输入数据映射至高纬空间的向量,j= 1~M),而映射后的特征空间维数通常很高,甚至是无穷维,因此直接计算是非常困难的。为解决这个问题,可通过引入核函数,将高维空间内积转化为求原始空间中核函数值的方式求解,即:

式(8)中, 是引入的核函数。本文采用的是高斯核函数,其具有如下形式:

式(9)中, 为高斯核函数的宽度参数。上述推导的理论目标不允许任何数据分错,要求所有点都在分类间隔外,这通常都会导致严重的过拟合问题。为防止过拟合,增强模型泛化能力,可以引入松弛变量,进而模型可写为:
引入松弛变量后,其物理意义在于训练时可通过参数C来控制分类间隔,允许部分点分错,这样就可以在训练时很大程度地抑制过拟合,提升模型的泛化能力,以适应新的分类数据。对于新输入的定位器底座图像,即可先输入训练好的自编码器网络提取降维图像特征,再将降维图像特征送入支持向量机(SVM)进行分类,识别是否存在开口销缺失异常。实际应用时,可先采用上述方法识别定位器底座开口销图像中的销钉区域,再在销钉区域判定开口销是否缺失。
6 试验分析
为检验本文提出的定位器底座开口销缺失识别方法的有效性,在现场设置3处平腕臂底座横向开口销缺失和8处斜腕臂底座纵向开口销缺失,采用本文提出的开口销缺失识别方法进行开口销缺失在线识别,识别效果如图2、图3所示,识别结果如表1所示。
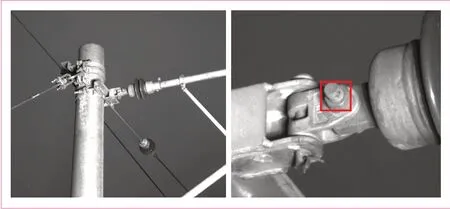
图2 平腕臂底座横向开口销缺失
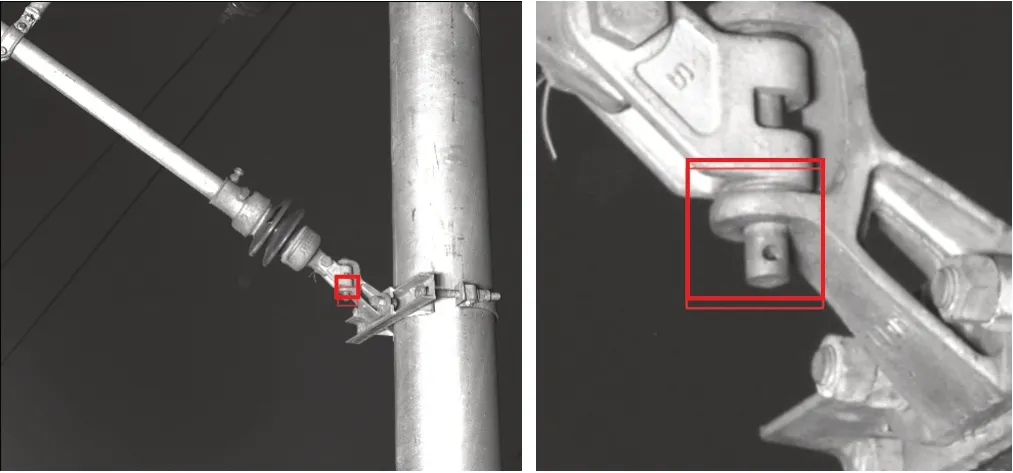
图3 斜腕臂底座纵向开口销缺失
由表1可知,现场设置的10处平腕臂底座横向开口销缺失均实现了正确识别,11处斜腕臂底座纵向开口销缺失中有1处未识别,其原因在于部件边缘污垢较多造成区域特征难以与背景图像区分。
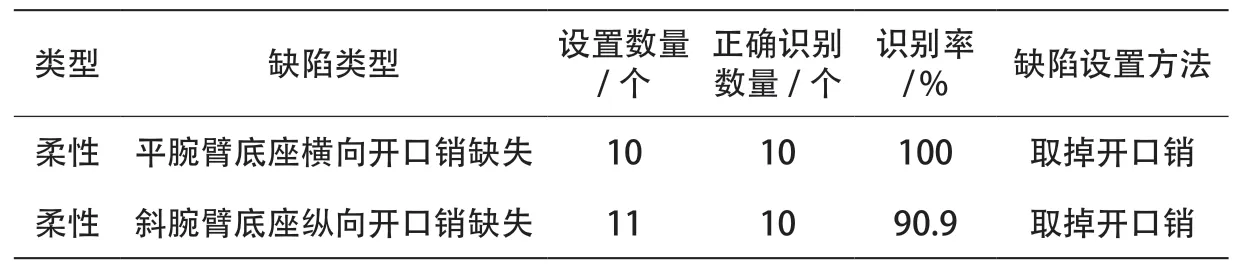
表1 开口销缺失识别结果统计
7 结语
为高效准确地对接触网定位器底座开口销缺失进行识别,针对开口销形态小、分布广的特点,采用归一化互相关模板匹配(NCC)算法进行定位器底座区域定位,同时采用无监督学习的自编码器(AE)提取图像的降维特征,再通过支持向量机(SVM)对开口销进行识别分类,有效解决了开口销缺失识别问题。现场试验结果表明,本文提出的算法能够对复杂线路环境图像中的定位器底座开口销缺失进行准确识别和有效检出,检出率高,具有较高的技术推广价值。