多视场低磁星敏感器及其在磁测卫星中的应用*
2021-08-12许域菲孔祥龙孙朔冬
许域菲,张 祎,孔祥龙,孙朔冬,赵 强
(1.上海卫星工程研究所·上海·201109;2.上海航天控制技术研究所·上海·201109)
0 引 言
近年来,地磁导航技术取得了快速发展,其综合优势日益突出。利用地磁导航技术可以实现自主式的卫星导航和控制,从而减少地面设备的工作量,缓解因国土资源限制而造成的地面测控站布点的困难,降低了为保障卫星运行所需提供的地面支持的费用;利用地磁导航技术还可以及时确定卫星的空间位置,提高卫星测量数据的利用率,降低卫星运行对地面站的依赖作用,提高卫星的生存能力,使卫星在地面跟踪测量被迫中断时仍可保持飞行任务的连续性。
地磁导航技术具有无源性,与有源制导和其他导航方式相比,地磁制导与导航有着无可比拟的优势。应用地磁制导技术的飞行器抗干扰能力强,突防能力取得了很大程度的提升。地磁导航技术在航空航天等诸多领域中发挥了重要的作用,逐渐成为了研究的热点[1-8]。
为了满足上述对地磁导航技术的需求,需要建立全阶次、精确的地球磁场模型。地球磁场模型的高阶部分通常可以通过航空、航海以及地面站测磁实现,但是这些测磁方法无法实现对地球低阶磁场的测量。卫星具备不受地面疆域限制、飞行速度快且可以覆盖全球的优点,应用卫星进行全球磁场测量所需携带的仪器满足对测量一致性的要求,这些优势均很好地满足了地球低阶磁场测量的需求。因此,地磁场测量卫星已成为实现地磁导航的重要技术手段。
除了地磁导航,地磁场测量卫星还在如下几个科学与民生领域中发挥着重要作用:
(1)满足地球物理和空间物理科学研究的需求:地磁场测量卫星能够为地球物理和空间物理科学研究提供大量高分辨率的科学数据,满足科学研究的需求;
(2)满足矿产资源磁力勘探的需求。在矿产详查勘探中,对磁异常作定量解释可用来追索和圈定磁性矿体。利用卫星测量地磁场可以在很短的时间内取得整个地球磁场的资料,建立全球范围内的地磁场模型,从而快速摸清全球矿产资源分布;
(3)满足地震监测的需求。感应磁效应理论认为,在地震孕育过程中,由于地下力学、热力学和其他物理化学的作用,震源区及相关断裂带的电导率会发生局部异常。对不同地区所进行的地震研究表明,这种效应可能为地震监测提供前兆信息。此外,地磁太阳日变化的某些特征的异常表现也可以作为地震监测的指标。
国外自1979年起就已开始进行地球磁场测量卫星的研究工作,目前已经发射的卫星主要包括Magsat卫星、Ørsted-1卫星、Ørsted-2卫星、Champ卫星。目前,国际地球磁场测量卫星水平最先进的是欧空局的Swarm计划。国外针对地球空间磁场目标特性的研究已经有了大量成果,对地球磁场内源场和外源场的研究都较为深刻,并对这些磁场的磁场源进行了建模研究,对相关外源磁场的分离原理和技术也获得了大量的科研和工程基础。基于这些基础,国外发射了多颗磁场测量卫星进行地球空间磁场的测量,得到了高精度的地球磁场测量数据,并由反演得到了高精度的地球磁场模型。我国目前已发射的与磁场探测相关的卫星主要包括TC-1卫星、TC-2卫星、风云气象卫星,以及电磁监测试验卫星。相比国外,我国在地磁测量卫星技术方面还比较薄弱[2-3]。
综上所述,开展地球磁场测量卫星的研制非常重要。然而,由于高精度地磁场卫星系统载荷任务的特殊性,卫星在搭载地磁场仪测量地球磁场时,要求卫星平台对地磁场仪的剩磁干扰尽可能小,从而提高测量的精度[9-11]。因此,地磁测量卫星对姿态测量精度和测量仪器的剩磁精度均提出了极高的要求,卫星平台必须具备超高磁洁净度特性。本文从这一需求出发,研究高精度、低剩磁星敏感器的研制,提高测量精度,降低剩磁,满足地磁测量卫星的应用需求。
1 高精度地磁场测量卫星
地球磁场测量卫星,如图1所示,是指搭载高精度磁力测量载荷(如矢量磁力仪、标量磁力仪和电场测量仪等设备)的卫星,其与卫星自身的姿态测量设备(如星敏感器)进行结构、温度场的统一设计与标定,以符合测量一致性的要求。卫星在轨获得飞行高度处的所有磁场数据,通过磁源分离方法去除外源电离层、磁层磁场数据,并利用剩余的内源地核、地壳磁场数据进行参数估计,最终得到全球磁场球谐函数模型。将由卫星测量的地球磁场低阶数据与由航空、航海以及地面站测量的高阶数据进行融合,可以得到精确的全球磁场模型,满足了我军对地磁导航、数字化战场建设等高精度地磁场测绘的需求。

图1 地磁场测量卫星Fig.1 The geomagnetic measurement satellite
从地磁场测量任务的特点出发,卫星平台需满足以下要求:
(1)平台低剩磁需求。卫星在搭载地磁场仪测量地球磁场时,要求卫星平台对地磁场仪的剩磁干扰尽可能小,从而提高测量精度。因此,卫星平台必须具备超高磁洁净度特性[4];
(2)平台小型化、轻量化的需求。由于地磁场测量卫星的有效载荷质量较小,发射质量也较小。为了降低成本,通常采用一箭多星的方式将卫星发射入轨。这便要求卫星平台具备小型化、轻量化的特点,以满足系统的任务需求。
在卫星地磁测量中,磁强计负责测量近地磁场的磁强度和地磁方位角,星敏感器负责敏感恒星位置,确定卫星自身姿态和经纬度,将星敏输出和磁强计输出精确转换到地理坐标系下构成一对数据,并在地球测绘结束后将数据形成地磁数据库,对外提供相应经纬度的地磁强度、磁偏角和磁倾角等参数。航天、航空、航海、军事等飞行器在应用磁罗盘测得地磁方位角之后,将地磁方位角信息与地磁数据库中的当地磁偏角信息匹对,便可以确定其地理方位和航行路线。因此,更加精确地建立地磁数据库对地磁导航和制导有着关键的作用,可提高地磁导航的精确性、隐蔽性,且误差不随时间积累。
2 多视场低剩磁星敏感器设计
甚低磁高精度星敏感器主要为星上计算机提供精度高且稳定可靠的姿态信息[12-15],其采用三头设计,可以降低光轴方向的测量误差,使得输出的三轴姿态信息保持精度在数量级上的一致性,且其动态性、数据更新率等技术指标均有着显著的优势;同时,为了满足卫星的磁测任务,星敏感器与磁测载荷距离较近,为0.5m。因此,需要重点考虑甚低磁设计,以满足剩磁指标要求。
2.1 三视场结构设计
无论是多个单视场星敏感器同时工作、互为备份,还是如法国EADS Sodern公司制造的名为HYDRA的多视场星敏感器,它们有一个共同点,即具有多个观测视场。因此,对多视场星敏感器的安装结构进行优化,提高姿态测量精度,具有重要的意义。为了进一步提高三视场星敏感器的测量精度,充分利用三个视场的恒星信息,需要合理设计三个视场之间的安装结构,并且通过理论分析和仿真实验,寻求最佳布局结构,使系统测量精度达到最高,实现结构布局的优化。
假设三视场星敏感器前视投影的成像如图2所示。
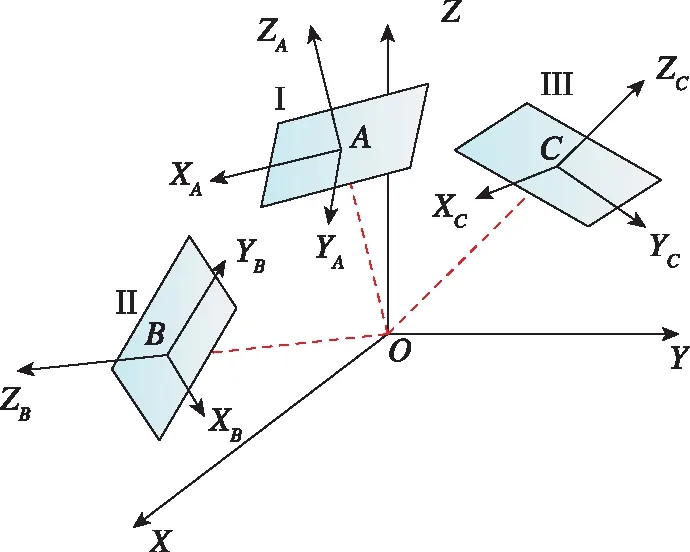
图2 三视场星敏感器前视投影成像示意图Fig.2 Imaging schematic diagram of the forward projection of a three fields-of-view star sensor
图2中,O-XYZ为航天器本体坐标系,A-XAYAZA、B-XBYBZB及C-XCYCZC为星敏感器三个视场的测量坐标系,分别表示为I系、II系和III系。令I系与星敏感器坐标系一致并以此作为基准,当OA、OB、OC之间的夹角确定时,便可以获得视场II到I的转换矩阵R12,以及III到I的转换矩阵R13。
对于多视场星敏感器而言,视场的相对位置会影响观测矢量的夹角,从而影响系统测量的精度。根据初步分析可知,当各视轴相互垂直时,多视场星敏感器的姿态测量精度最高,后续将对最佳安装角进行分析。
2.2 降剩磁设计
为了实现系统对星敏提出的剩磁指标的要求(0.02A·m2),需对三头星敏感器的结构做进一步的分体优化设计,如图3所示。可将结构设计分为光学头部、电子学箱和连接线缆三部分。需重点对光学头部进行精细化降剩磁设计,包括对光学头部材料进行磁源梳理和剩磁筛选,对感应磁场进行磁源分析,以及完成线路板的优化设计,严格控制光学头部和电子学箱的剩磁指标;可将数据处理部分置于电子学箱并放在卫星本体上,远离磁场测量载荷;光学部分与电子学箱之间采用低电压差分信号(Low Voltage Differential Signal,LVDS)进行数据通信,电缆则采用双绞线方式,以降低剩磁的影响。
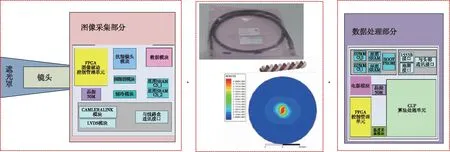
图3 分体式结构优化设计Fig.3 Improved design of separated structure
(1)光学头部磁源分析
铁磁性材料可产生磁场,磁源包括光学组件、探测器、元器件(管脚)、结构件、紧固件、接插件等;电流回路或脉冲电流变化可产生感应磁场,磁源包括电源模块、PCB板上各模块间的电路走线。
(2)光学头部降剩磁措施
①对硬件设计中所有元器件的材料进行磁筛选,杜绝铁磁性材料的使用,按照表1进行材料的选择。
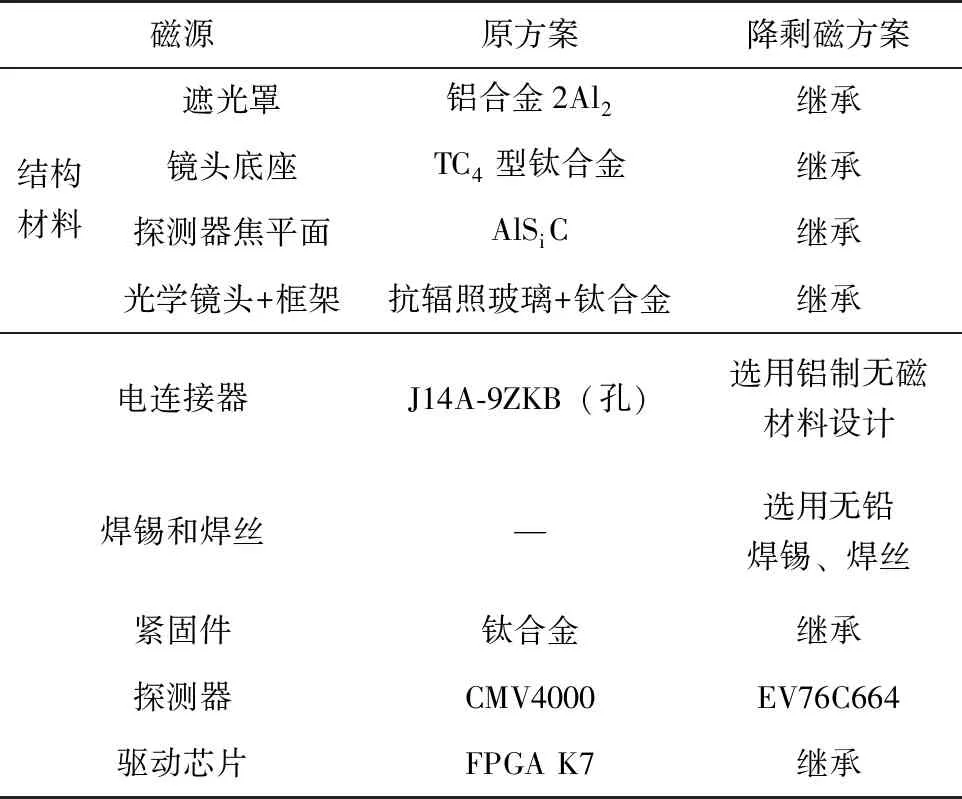
表1 材料的选择Tab.1 Material choice
②对电源模块和PCB板上各模块间的电路进行精细化设计,以降低感应磁场。其中,电源模块是星敏头部电源驱动的核心,是感应磁场最大的来源;PCB板是星敏头部电流回路最为集中的部位,是感应磁场的重要来源。
电源模块:通过对电源模块进行分散化设计、选用线性电源转换芯片,可最大程度地降低由电源模块产生的感应磁场。针对光学头部电路设计中的电磁干扰滤波器(Electromagnetic Interferen-ce,EMI)、DC-DC模块和扼流圈等元器件,在进行精细化设计时,需改用缓存低压差线性稳压器(Low Dropout Regulator,LDO),去掉与制冷功能相关的DC-DC和电感,同时将DC-DC电源模块分散化,并采用封装方式。
PCB板电路设计:针对PCB板内和板间电路走线进行设计,通过减小环路面积、提高走线脉冲电流频率、对临近电流采用同频率反向对称布局等措施,最大程度地降低由电流产生的感应磁场。为了减小由XM器件PCB板上的恒流产生的磁感强度,提出了反向电流补偿法,以减小其对磁场测量计带来的干扰。本节在带状线上对称布置了反向恒流带状线,以补偿远端磁感强度的计算结果。构建的2条走线模型如图4(a)所示,10条走线模型如图4(b)所示。所用带状线的规格相同,宽度为1mm,厚度为0.2mm。
(a)2条带状线
2.3 高精度姿态确定方法
三视场星敏感器一般采用异步工作模式,三探头星敏感器只输出一个探头的姿态数据,数据更新率可提高为原来的3倍。该模式适当降低了三探头星敏感器的姿态精度,其目的是提高数据更新率。由于该模式把获取一幅星图的时间平均划分成了三份,且三个探头分别采用了不同的控制器进行控制,同时电路设计、工艺等影响因素造成了时间延时的不一致,采用该模式很难实现三个探头之间均匀的曝光时刻。
本文提出了一种特殊的三探头星敏感器的姿态确定方法:将三个探头分别进行曝光,并且实时保存曝光时刻。数据处理单元在接收到三个探头星图数据的同时也能接收到三个探头的曝光时刻。这样,数据处理单元可利用时间信息对三个探头的星图进行融合,从而为三探头星敏感器提供了高精度的姿态信息,具体过程如下:
三个单位矢量Xn、Yn、Zn构成一个相互正交的坐标系,其中,Yn和Zn的模分别为|Yn|=1和|Zn|=1。新坐标系记作Fn,空间飞行器的体坐标系为Fb,空间参考坐标系为Fr。Xn、Yn、Zn是测得的三个矢量,它们与Fb和Fr坐标系的描述为
其中,Ub、Vb、Ur、Vr、Wb、Wr分别为Xn、Yn、Zn在坐标系Fb和Fr中的坐标列阵(方向余弦)。
由于三个单位矢量Xn、Yn、Zn相互正交,因此有
Cnb为Fn与Fb间的姿态矩阵(方向余弦矩阵),Cnr为Fn与Fr间的姿态矩阵(方向余弦矩阵)。综合上式有

如果Fb为飞行器体坐标系,Fr=Fo为轨道坐标系,针对由x-y-z旋转顺序定义的滚动角φ、俯仰角θ、偏航角ψ皆为小角的情况,Fb与Fo间的姿态矩阵Cbo为
因此,利用上式可求出滚动角φ、俯仰角θ及偏航角ψ。需要说明的是,由于滚动角φ、俯仰角θ及偏航角ψ均约定为小角度,也常以Δφ、Δθ、Δψ表示,称之为滚动、俯仰、偏航偏差角。
采用上述方法可实现三头甚低剩磁高精度星敏感器的精确姿态确定。
3 仿真与测试
为了验证所设计的星敏感器的精度和降磁的有效性,对星敏头部电流回路最集中的部位(即感应磁场的重要来源——PCB板),开展了仿真和测试,得到了如图5所示的磁感强度的仿真测试结果。
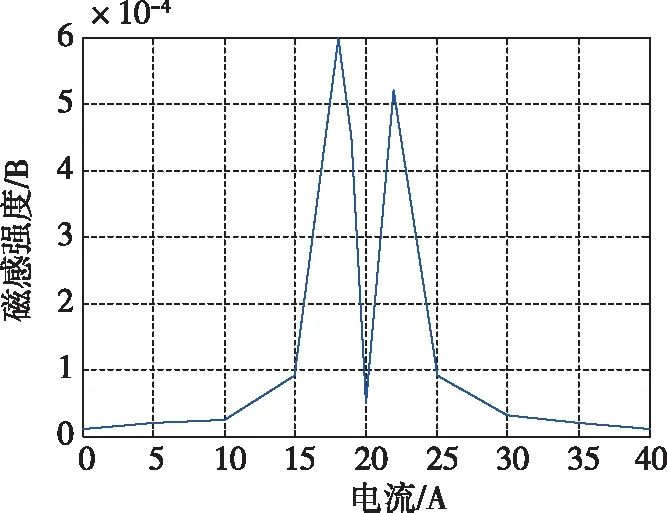
(a)line1电流方向相同
图5的仿真结果表明,采用反向带线补偿后,远端磁场可下降至少一个数量级。当带状线电流一致时,带状线远端中心区域的磁感强度最高,两边略低;而当采用一半电流进行反向补偿后,带状线远端中心区域的磁感强度最小,可降低一个数量级。由于补偿效果减弱,其外延会呈现增高态势,但整体小于不补偿的情况。
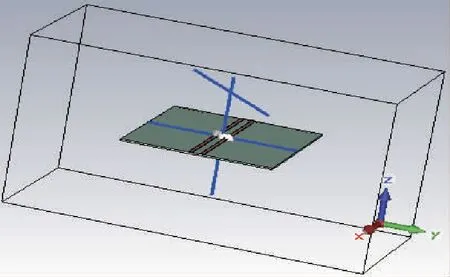
在上述基础上,建立三头星敏感器的磁场分析模型,进行磁场仿真,并进行磁场计算,沿坐标轴正向的磁场衰减如图6所示。
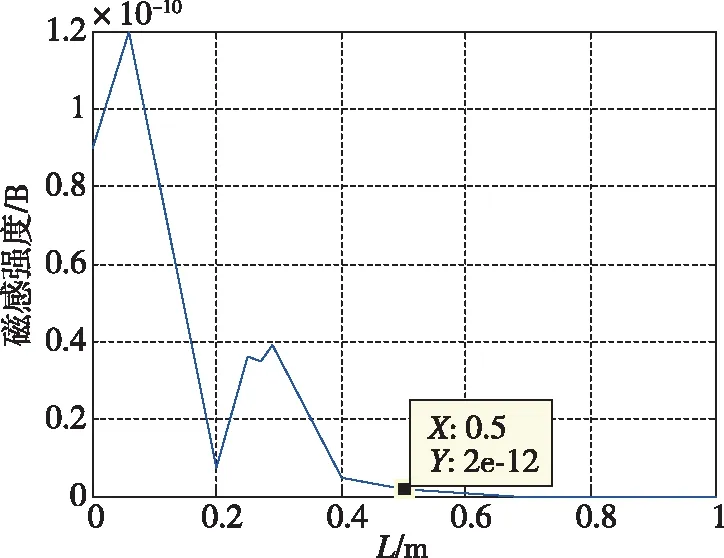
图6 星敏感器磁场在空间中的衰减Fig.6 Attenuation of magnetic field of star sensor in space
通过仿真分析可知,经过降磁方案设计,沿坐标轴方向至0.5m处,由星敏感器产生的磁场衰减为2×10-12T。通过计算,星敏剩磁矩可以降至0.02×10-3(A·m2),满足系统指标要求。
最后,对星敏感器测量精度进行仿真,得到姿态相应图如图7所示。
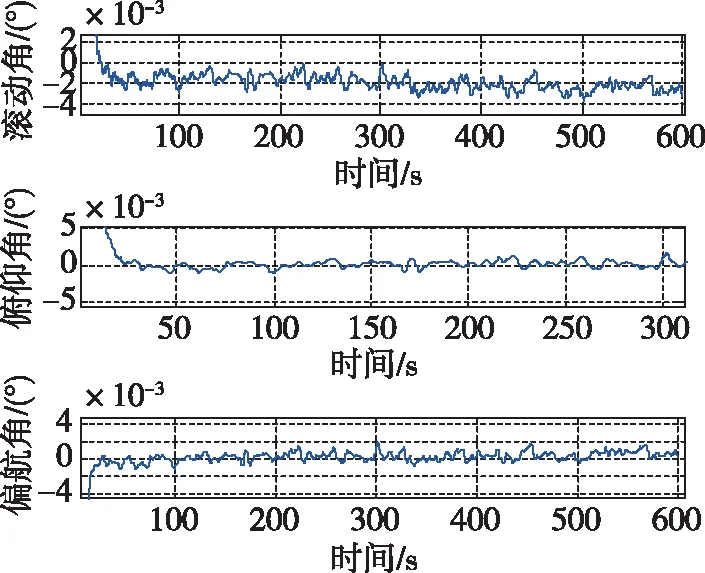
图7 三轴欧拉角曲线Fig.7 Curve of Euler angle along three-axis
图7的仿真结果表明,改进的星敏感器能够取得10-3度(即角秒量级)的测角精度,能够为高精度地磁探测卫星提供高精度的测量精度,满足总体指标要求。
4 结 论
本文提出了低剩磁、高精度的星敏感器改进设计方法。通过多视场结构设计,降低光轴方向的测量误差,继而进行了分体优化设计。对光学头部进行了精细化降剩磁设计,严格控制了光学头部和电子学箱的剩磁指标,同时采用高精度的姿态确定算法提高了姿态确定精度。本文提出的方法能够提高测姿精度,降低剩磁对地磁场探测的影响,对地磁场测量卫星的应用具有较大的意义。
