平衡障碍康复机器人在老年下肢骨折患者术后康复中的应用效果研究
2021-08-09冯昱宁李开南贾子善
冯昱宁,李开南,贾子善
老龄化已成为全社会密切关注的热点问题之一[1]。2011-09-06,国家卫生健康委员会发布了《老年人跌倒干预技术指南》,明确指出跌倒是我国65岁以上老年人受伤、死亡的第一原因[2]。因此老年人跌倒后的及时诊治和康复,尤其是跌倒后康复训练的规范性、精准性、个性化至关重要[3]。然而,老年人跌倒的主要原因是不平衡(步态稳定性降低和平衡障碍)[4]。步高、步长、连续性等步态特征与老年人跌倒的风险密切相关,老年人为了弥补这种平衡能力的下降,常采取更加谨慎、缓慢的步行方式[5]。另一方面,随着年龄的增长,老年人的中枢控制能力下降,对比感减弱,躯干摆动变大,平衡能力、协同运动能力下降,最终导致摔倒风险增加。为了尽可能减轻老年人跌倒后对家庭、经济、社会等造成的负担,提高其生活质量,老年人平衡障碍的康复训练越来越受到重视。
针对跌倒老年人平衡障碍的康复训练,一种方法是通过单独训练患者的平衡能力,使老年人在无平衡能力状态下逐步实现静态平衡,进而实现自动态平衡,乃至他动态平衡,此种训练的评估参数主要为平衡能力参数,在患者达到平衡能力要求后可能还需要进一步对步态进行训练。另外一种方法则主要体现在下肢肌群训练方面,使患者在下肢康复的过程中逐步掌握平衡的能力和技巧,达到平衡与行走同步进行的效果,训练效率较高[6]。对于前者,我国自主研发的平衡障碍康复机器人临床成效确切,其有两方面理论运动基础:一方面着眼于生物力学或者生、物、化三者的复合应用;另一方面侧重于运动与学习反复交替的过程。人们在受到较大创伤时,如人体软组织、血管、神经等都受到各层面损伤,进而正常的运动与感觉受到了明显的限制,康复机器人可以突破传统的医治观念,使患者在其辅助下不断学习、不断运动,从而逐渐恢复机体的康复功能。本文将通过我国自主研发的平衡障碍康复训练机器人的康复方式对跌倒老年人平衡障碍患者康复进行深入研究,在多维度尽可能全面地探索影响老年人跌倒后康复训练的主要影响因素,为以后的多层面延展奠定学术基础。
1 对象与方法
1.1 研究对象 选取成都大学附属医院骨科病区于2020年4—10月收治的100例因跌倒致下肢骨折手术的老年患者为研究对象,按计算机随机分组法分为试验组50例和对照组50例。在治疗过程中5例患者因治疗费用高、随访时间长抑或突发其他疾病不能完成康复训练,视为中途脱落病例,不纳入统计分析,其中试验组脱落3例,对照组脱落2例。纳入标准:(1)因自身无外力跌倒而下肢骨折术后的患者,如股骨颈骨折、胫腓骨骨折等,且临床病历资料记录完善;(2)年龄>60岁;(3)经X线、CT检查证实下肢骨折;(4)首次发病;(5)意识清楚,认知功能正常。排除标准:(1)有神经系统或者精神系统疾病的平衡障碍患者,如脑卒中、小脑疾病、脊髓损伤、抑郁症等;(2)患有视器官、前庭器官相关疾病的平衡障碍患者,如白内障、耳石症等;(3)服用致眩晕等药物的平衡障碍患者;(4)伴有冠心病或者心血管疾病的平衡障碍患者,收缩压≥160 mm Hg(1 mm Hg=0.133 kPa)或者≤100 mm Hg;(5)伤及下肢膝关节、踝关节疾病的患者。剔除及脱落标准:(1)试验过程中发现受试对象不符合病例纳入标准;(2)未按试验进行训练,期间接受其他干预措施者;(3)因各种原因致受试者无法完成疗效评估,观察资料不完整者。该研究获得成都大学附属医院伦理委员会审批。
1.2 训练方法
1.2.1 减重步行康复训练 对照组采用减重步态训练器(采用上海康为医疗科技发展有限公司生产的RE6116减重步态训练器,设备由悬挂支架,跑步平台等组成,样机见图1)进行减重步行康复训练。(1)物理作业治疗:包括良肢位摆放、下肢肌肉收缩训练、健侧邻近大关节活动、转移训练、关节松动训练及日常生活活动能力训练等,并使用下肢压力泵避免发生下肢静脉血栓。术后第1天开始,每天在专业康复师的指导下训练90 min,每周5 d,连续8周。(2)减重步行训练:术后第2周开始,在同天物理作业治疗完成后进行,训练前先将躯干通过减重悬吊衣固定,再将减重悬吊衣固定于天轨两条轨道上,拉紧提高悬吊绳以减轻体质量对下肢的压力,嘱患者双脚站立于地面上,沿轨道方向进行步行训练,行走过程中康复治疗师给予语言和手法指导。每天30 min,每周 5 d,连续 15周[7]。

图1 减重步态训练器样机图Figure 1 Prototype of gait trainer for weight loss
1.2.2 平衡障碍康复机器人训练 试验组受试者首先进行物理作业治疗,具体内容同减重步行康复训练中的物理作业治疗,术后第1天开始,每天在专业康复师的指导下训练90 min,每周5 d,连续8周。术后第2周开始,平衡障碍康复机器人(由解放军总医院联合北京航空航天大学研发的康复辅助设备,由测试平台、姿态传感器、辅助梯、悬挂支架、平衡测试防护服组成)调整为正常生理步态的步行训练模式,康复机器人双下肢髋膝电机带动患者下肢协调运动以模拟正常生理步态行走。训练前通过减重悬吊衣固定患者躯干,根据下肢长度调节康复机器人髋膝关节之间长度,固定双足,调节康复机器人前后左右偏移角度,见图2。最后通过3D视觉反馈场景进行平衡和步行训练,每天训练30 min、每周5 d,连续15周。如果训练时出现患者身体不适或康复机器人故障,则立即启动紧急制动系统停止训练[8]。
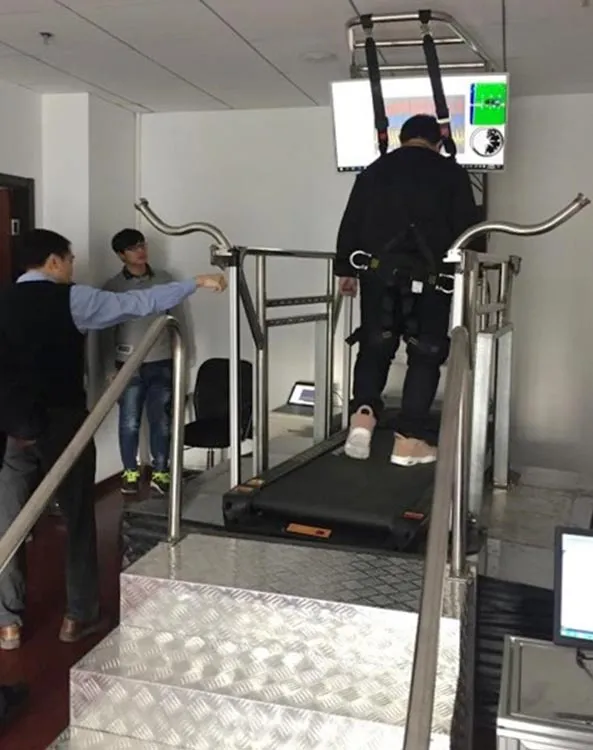
图2 平衡障碍康复机器人模拟图Figure 2 Simulation diagram of balance disorder rehabilitation-assisted robot
1.3 疗效观察 记录受试者的基本信息,包括姓名、性别、病案号、年龄、骨折部位、BMI、住院时长等。试验组和对照组患者根据上述康复训练方法,于训练第16周最后一次康复训练完成后,穿戴传感器进入同一场地,由同一位对分组不知情的康复治疗师进行数据采集,并实时将数据传入软件系统中进行算法分析:采用姿态传感器采集受试者们双足跨步平均时间(左、右)、3 m直行平均步速(左、右)、3 m直行平均步长(左、右)。《中国老年人健康指南》指出老年人双足跨步平均时间为0.38~0.55 s,3 m直行平均步速为31.17~53.59 cm/s,3 m直行平均步长为29.15~61.43 cm[9]。术后训练第8周末、第12周末、第16周末进行Berg平衡量表评分。Berg平衡量表是平衡功能评估的金标准,包括坐位站起、无支撑站立、无靠背坐位、站立位坐下、转移、闭目站立、双脚并拢站立、上肢向前伸展并向前移动、自地面拾起物品、转身向后看、转身一周等14项内容。每个项目的评分范围为0~4分,若总得分低于40分,则需要重视该受试者是否有跌倒风险[10]。
2 结果
2.1 一般资料 两组性别、年龄、BMI比较,差异无统计学意义(P>0.05);两组住院时长比较,差异有统计学意义(P<0.05),见表1。
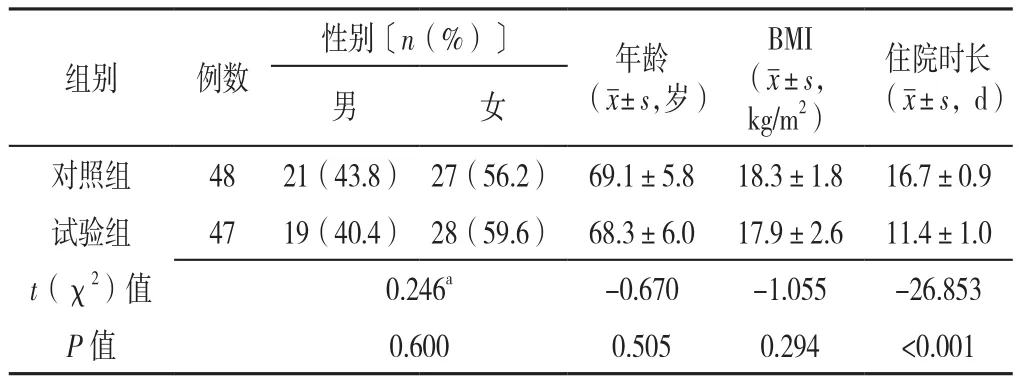
表1 两组老年下肢骨折术后患者一般资料比较Table 1 Comparison of general data between two groups of elderly patients with fall-related lower limb fractures
2.2 两组步态指标比较 试验组左右足跨步平均时间均短于对照组,差异有统计学意义(P<0.05);试验组左右足3 m直行平均步速及3 m直行平均步长均优于对照组,差异有统计学意义(P<0.05),见表2。
表2 两组老年下肢骨折患者术后训练第16周步态指标比较(±s)Table 2 Comparison of gait indices at the end of the 16th week of postoperative training between two groups of elderly patients with fall-related lower limb fractures

表2 两组老年下肢骨折患者术后训练第16周步态指标比较(±s)Table 2 Comparison of gait indices at the end of the 16th week of postoperative training between two groups of elderly patients with fall-related lower limb fractures
组别 例数 跨步平均时间(s) 3 m直行平均步速(cm/s) 3 m直行平均步长(cm)左足 右足 左足 右足 左足 右足对照组 48 0.34±0.118 0.38±0.157 16.73±5.865 15.53±5.163 9.89±4.142 9.94±4.926试验组 47 0.26±0.142 0.32±0.124 21.06±4.645 19.17±5.941 11.65±3.472 13.17±3.695 t值 -2.989 -2.064 3.984 3.191 2.294 3.804 P值 0.004 0.042 <0.001 0.002 0.027 <0.001images/BZ_101_1134_2861_1155_2891.pngimages/BZ_101_1705_2861_1726_2891.png
2.3 两组Berg平衡量表得分比较 两组训练与时间的交互作用具有统计学意义(F交互=53.116,P交互<0.001);两组间下肢运动功能恢复程度比较,差异有统计学意义(F组间=3.675,P组间=0.013);两组组内不同观察时间点的Berg评分比较,差异有统计学意义(F时间=1 364.425,P时间<0.001),见表3。
表3 两组老年下肢骨折患者术后训练不同时间点下肢运动功能Berg平衡量表评分比较(±s,分)Table 3 Comparison of Berg Balance Scale scores of lower limb motor function at the end of the 8th,12th and 16th weeks of postoperative training between two groups of elderly patients with fall-related lower limb fractures
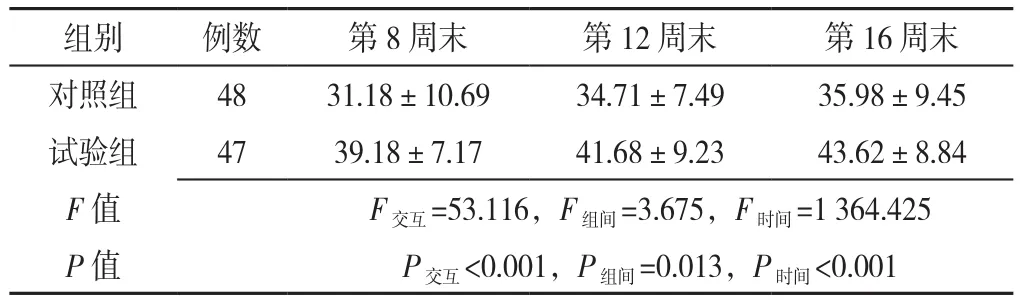
表3 两组老年下肢骨折患者术后训练不同时间点下肢运动功能Berg平衡量表评分比较(±s,分)Table 3 Comparison of Berg Balance Scale scores of lower limb motor function at the end of the 8th,12th and 16th weeks of postoperative training between two groups of elderly patients with fall-related lower limb fractures
组别 例数 第8周末 第12周末 第16周末对照组 48 31.18±10.69 34.71±7.49 35.98±9.45试验组 47 39.18±7.17 41.68±9.23 43.62±8.84 F值 F交互=53.116,F组间=3.675,F时间=1 364.425 P值 P交互<0.001,P组间=0.013,P时间<0.001
3 讨论
老年人跌倒是全世界老年人残疾和死亡的主要原因之一。随着国内外专家对老年人跌倒问题的关注。平衡康复机器人、人工智能、3D虚拟、机脑接口等前沿方式正逐步走入普通大众视野,帮助老年人更好地做好跌倒后的康复,提高其生活质量。
我国自主研发的平衡障碍康复机器人填补了下肢骨折患者术后康复的科技部分。本研究结果显示两组步态指标方面比较,试验组左右足跨步平均时间均短于对照组;试验组左右足3 m直行平均步速及3 m直行平均步长均优于对照组。一方面肯定了平衡障碍康复机器人在客观运动数据采集及大数据算法上有着快记录、高精算等优势;另一方面也显示该运动指标具有良好的特异性,值得深入研究和探讨。在两组下肢骨折老年患者术后训练第8、12、16周末进行下肢运动功能Berg评估,结果显示随着康复时间延长,下肢运动功能评分呈递增趋势;同一康复时间点,试验组下肢运动功能评分更优。两组患者术后不同康复方式的锻炼效果对比给临床工作者展示了平衡障碍康复机器人的潜力,也为平衡障碍康复机器人进一步拟定康复处方及量化评判康复标准奠定了基石。
虽然本研究中两组患者住院时长比较,差异有统计学意义,但因试验开始时,严格按照纳入标准和排除标准遴选患者,且康复锻炼与住院时长没有必然联系,所以不存在基线不一的情况。另外,因受试者的职业、生活习惯等不同,所以采集跨步平均时间、3 m直行平均步速、3 m直行平均步长时加采左右双侧的运动指标,从而减少信息偏移。运动指标术前因受试者骨折未能采集,训练后8周、12周受试者仍处于下肢运动功能恢复期,部分受试者不能较好完成数据采集的训练试验,出现两组变化值较小及结果误差较大的情况,故取训练16周末的康复训练数据,在结果准确性及误差校正性得到最大可能的保证。
本研究的不足之处和局限性:(1)本研究为回顾性研究,研究结果可能不够全面;(2)本研究样本量不大,容易产生信息偏倚;(3)受客观因素的限制,本研究只纳入了常见下肢骨折疾病,未能全面涵盖更为复杂、更为少见的下肢骨折疾病。未来有待多中心大样本研究进一步精准评估平衡障碍康复机器人对老年人跌倒引起下肢骨折术后运动功能康复的效果。
目前国外市面上平衡障碍康复机器人能一定程度上改善老年人跌倒后下肢康复过程中的活动能力,但仍需要进一步优化。随着对因跌倒导致平衡障碍的老年患者的不断研究,平衡障碍康复机器人将会被更广泛更深入地应用。如促进下肢神经恢复的途径:目前主流的观点是重塑理论及施万细胞或嗅鞘细胞支持生长理论,中和髓鞘抑制剂的抗体(如Nogo-A)也是一种很有前途的临床前治疗[11]。椎管内微刺激:将直径小于50 mm的微细穿透性微波电极手术插入腰骶膨大的腹角,通过突触外激活运动神经元,从而使运动单位接近正常秩序,并降低肌肉疲劳度,从而更好地协调髋关节、膝关节和踝关节之间的协同作用[12-13]。脑-机接口:为了提高前面提到的干预措施的可用性,应用程序的智能控制将是必要的。脑机接口包括对神经或认知过程做出反应的设备或系统,文献[14]应用脑-机接口与信息安全管理体系(ISMS)取代大脑与脊髓或末端执行肌失去的连接,并允许意志控制行走,但需要进一步的循证临床研究来确定该结论。特别值得注意的是,2016年DONATI等[15]致力于一项基于脑-机接口多阶段步态神经康复的研究,并取得了积极的研究结果。
综上,平衡障碍康复机器人对老年人跌倒后下肢骨折术后的运动功能康复效果相对于减重步行康复训练效果更好,但随着康复时间延长,下肢功能恢复能力提升较为缓慢。
作者贡献:冯昱宁负责文章的构思与设计、研究的实施与可行性分析、数据收集与整理、统计学处理、结果的分析与解释、论文撰写;李开南负责论文的修订、文章的质量控制及审校,并对文章整体负责,监督管理;贾子善负责疑难病例及北京样本中心试验开展。
本文无利益冲突。