基于偏振信息探究水下环境气泡群对目标成像的影响*
2021-08-05宋强孙晓兵刘晓提汝芳黄红莲王昊4
宋强 孙晓兵 刘晓 提汝芳 黄红莲 王昊4)
1) (中国科学院合肥物质科学研究院安徽光学精密机械研究所, 合肥 230031)
2) (中国科学技术大学, 合肥 230026)
3) (中国科学院通用光学定标与表征技术重点实验室, 合肥 230031)
4) (安徽大学物质科学与信息技术研究院, 合肥 230601)
5) (合肥市农业行业首席专家工作室, 合肥 230031)
水下光学成像是海底探索和目标识别的一个重要方式. 由于海浪、船舶尾流以及海洋生物游动与呼吸等原因, 存在着大量的气泡. 气泡群的光散射作用往往会使水下目标成像效果受限、难以识别, 并且一般的光学技术难以消除气泡对成像的影响. 针对上述问题, 本文先从理论上推导和仿真了入射光线在水下单气泡、气泡群中以及目标表面的光强和偏振信息的变化; 然后在构建了水下气泡实验平台的基础上探究了光源入射角度的改变以及成像波段的变化对气泡环境中目标偏振成像的影响; 研究了不同金属材质目标物的强度和偏振信息的变化趋势; 分析了水下目标在不同气泡群厚度条件下强度和偏振信息的变化趋势; 最后利用偏振特征提取与视觉信息保留的图像融合方法抑制气泡对水下目标成像的影响. 实验结果显示气泡群中目标成像会受到多种因素的影响, 利用偏振图像融合方法会使气泡群受到较好的抑制, 并提高了水下目标的清晰度.
1 引 言
水中气泡的光学散射特性研究是海洋光学的一个重要研究内容. 在海洋环境中, 由于海浪破碎、海洋生物以及船舶尾流等原因, 存在着大量的气泡[1,2]. 气泡的物理参数与海水存在较大差异, 会表现出特殊的声、光、电、磁等性能. 例如: 舰船尾流中气泡大小、运动轨迹及速度、数密度分布等物理参数的获取能为深入研究气泡群物理特性提供最基础的数据[3]. 根据气泡尺寸的不同, 气泡对光束的散射可以分为两种类型: 1)如果气泡的半径与入射光束的波长相当, 则气泡的散射可以被当作水中悬浮粒子的散射来对待; 2)如果气泡的尺寸远大于入射光的波长, 气泡的散射特性与水中悬浮粒子的散射特性有着很大区别, 可用几何光学的方法进行分析研究[4]. 水下气泡的研究主要受入射光子能量、水下成像系统的几何结构、水下探测方法等方面的影响.
对水中气泡的光学散射特性的研究在20世纪获得了快速发展, 人们从理论和实践等多个方面对气泡的散射特性以及气泡对水体光学特性的影响进行了广泛研究. Davis[4]用几何方法研究了水中单个气泡的光散射特性, 并对大气泡的散射特性做近似的解释; Stramiki[5]最早利用Mie理论研究了干净气泡群的光学特性; Marston等[6,7]利用物理光学方法和Mie理论对单个气泡的散射特性进行了较为完善的研究; Zhang等[8]用Mie理论先后研究了海水中干净和脏气泡群的体散射函数及气泡群的后向散射对空间遥感的影响; Konkhanovsky[9]用蒙特卡罗光线追迹法研究了气泡群散射光的强度和偏振特性; 梁善勇等[10]基于矢量蒙特卡罗方法建立了舰船尾流气泡群激光后向探测仿真模型,并构建了模拟尾流气泡群激光散射强度和偏振探测实验平台, 实验验证了模拟结果的准确性; 张浩等[11]提出了一种基于Zernike矩与灰度计算的水下光学气泡图像识别方法, 通过计算悬浮微粒特征的相似度, 区分圆形微粒与非圆形微粒, 通过计算微粒中心与灰度变化趋势, 辨别气泡与固体悬浮微粒.
水中的散射微粒造成的后向散射光具有明显的部分偏振特性, 与非偏振的水下复原方法相比,基于偏振信息的水下图像复原技术可以从物理原理上有效抑制水下的后向散射光, 利用主动光照明, 通过公式推导分离出目标光和后向散射光, 且在高浓度散射介质环境下, 抑制后向散射光, 提升图像质量和目标的可见度[12-14]. 但是现阶段国内外对于气泡群环境下水下目标成像的相关研究并不多见, 特别是尺寸较大的单气泡构成的气泡群如何影响目标成像以及采用何种方式抑制气泡群的干扰, 目前为止还未有相关资料可以查询. 本文构建了一个完整的气泡实验和探究体系, 从单气泡和气泡群理论推导和物理分析出发, 仿真了水下环境中典型材质目标物的偏振信息在不同光源入射角度条件下的变化趋势, 接着在搭建水下气泡实验平台的基础上采集数据, 然后处理气泡数据, 从多个方面探究不同条件下的气泡群对水下目标强度信息和偏振信息的影响, 最后利用偏振特征提取与视觉信息保留的图像融合方法抑制气泡对水下目标成像的影响, 实现水下气泡环境中目标识别处理.
2 物理推导与理论分析
当光线入射在不同介质的分界面时, 如不考虑散射、吸收等其他形式的能量损耗, 则入射光的能量只能在折射光和反射光中重新分配, 且总能量保持不变. 利用Fresnel公式可以描述反射光与折射光的水平分量强度、垂直分量强度及其相位变化等关系[15]. 对于任一偏振态的光, 都可以分解为一对互相垂直的分量, 一个振动方向垂直于入射面, 用S 表示, 另一个振动方向平行于入射面, 用 P 表示[15].如图1所示,S1和P1表示入射光的电场矢量,和表示反射光的电场矢量,S2和P2表示透射光的电场矢量,n1和n2表示介质层两边的折射率,i1表示入射角,表示反射角,i2表示折射角,k1,和k2为光线传输方向.
根据Snell折射定律, 得到折射角i2为

根据Fresnel公式, P 偏振分量的反射系数和折射系数为:
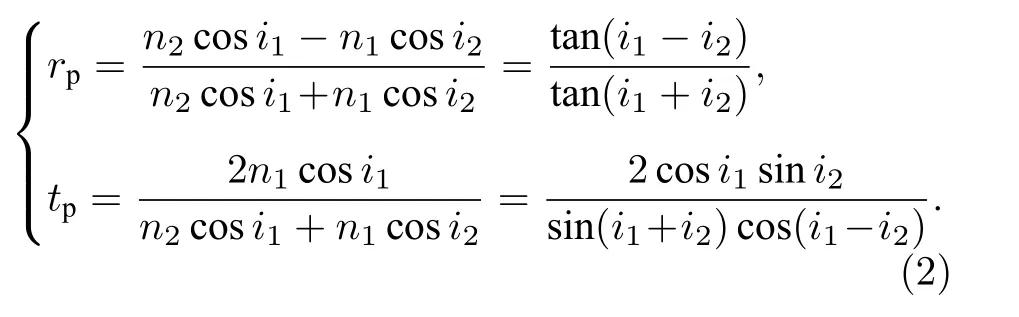
S 偏振分量的反射系数和折射系数为:
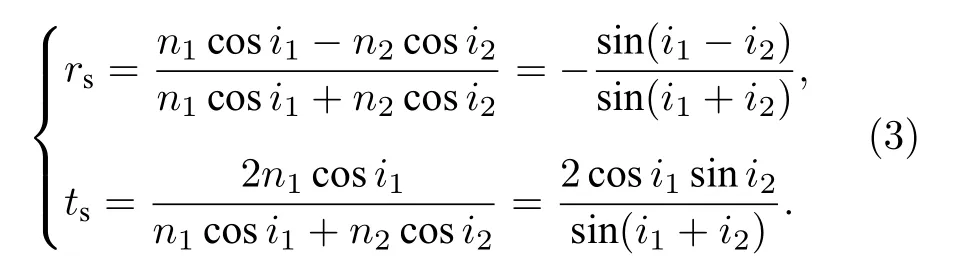
如果入射光照射到气泡界面(水中-空气)的某一点, 则称在气泡界面处呈点状的光为点光源. 如图2所示[16], 设点光源的入射角、折射角分别为α和β, 且水体和空气折射率分别为1.33和1.00, 则β=sin-1(1.33sinα). 点光源入射到水中气泡表面A点将发生第1次反射, 将其记为经气泡第1次折射的光线记为l=1. 经过B点在气泡内壁反射的光线记为l=2 , 折射出气泡外界面的光线记为同理在C点处气泡内壁反射的光线记为l=3 , 折射出气泡外界面的光线记为, 在D点处气泡内壁反射的光线记为l=4 , 折射光为由于光具有偏振性, 可以用Fresnel反射理论推导出水中气泡界面处的反射光强和折射光强计算公式[16].
由于总光强是 S , P 分量之和, 所以经推导, 在气泡界面的某点第n次反射和折射的光强和第2次的强度之间的关系表示为[16]

由(4)式可以依次计算出在A点处、B点处、C点处、D点处的出射光强大小及其变化趋势. 计算得到图2中A点处光线第1次反射进入气泡外界面光强、B点处光线第2次折射出气泡的光强、C点处光线第3次折射出气泡的光强、D点处光线第4次折射出气泡的光强为:
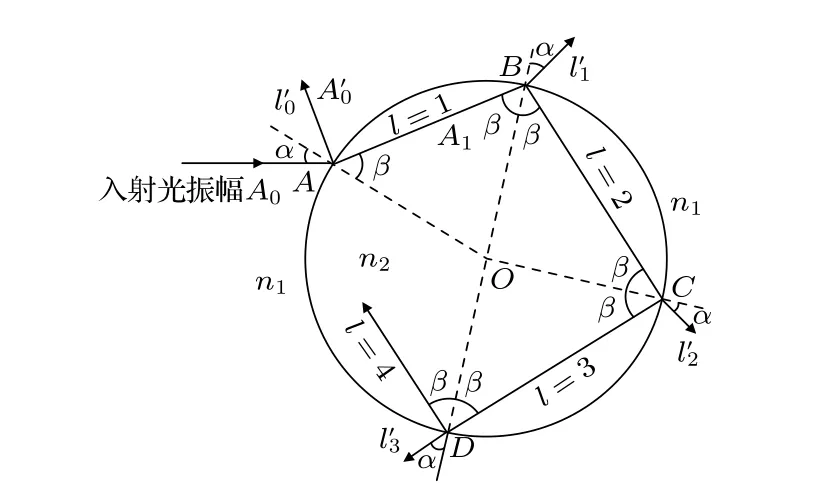
图2 点光源入射到水中气泡界面[16]Fig. 2. Light’s incidence to water bubble interface[16].

其中,I0为入射到水中气泡界面的光强, 表示为I0=I0p+I0s, 设入射强度初始值为1, 计算求出在不同入射角度下气泡外界面中各处能量所占入射光源比例如表1所列.
由表1可知, 在小于临界角的范围内, 光源在气泡A点、C点和D点处外界面反射光强随着入射角度增大而不断增大; 在B点处(即第二次折射出外界面)的折射光源在初始入射光I0总能量中始终占据较大比例, 光强为最大; 在D点处的光强值为最小, 基本为零; 在接近临界角时, 由于发生全反射现象, 气泡界面各处的光强发生突变,A点处急剧增加, 其他各处基本可以忽略不计.
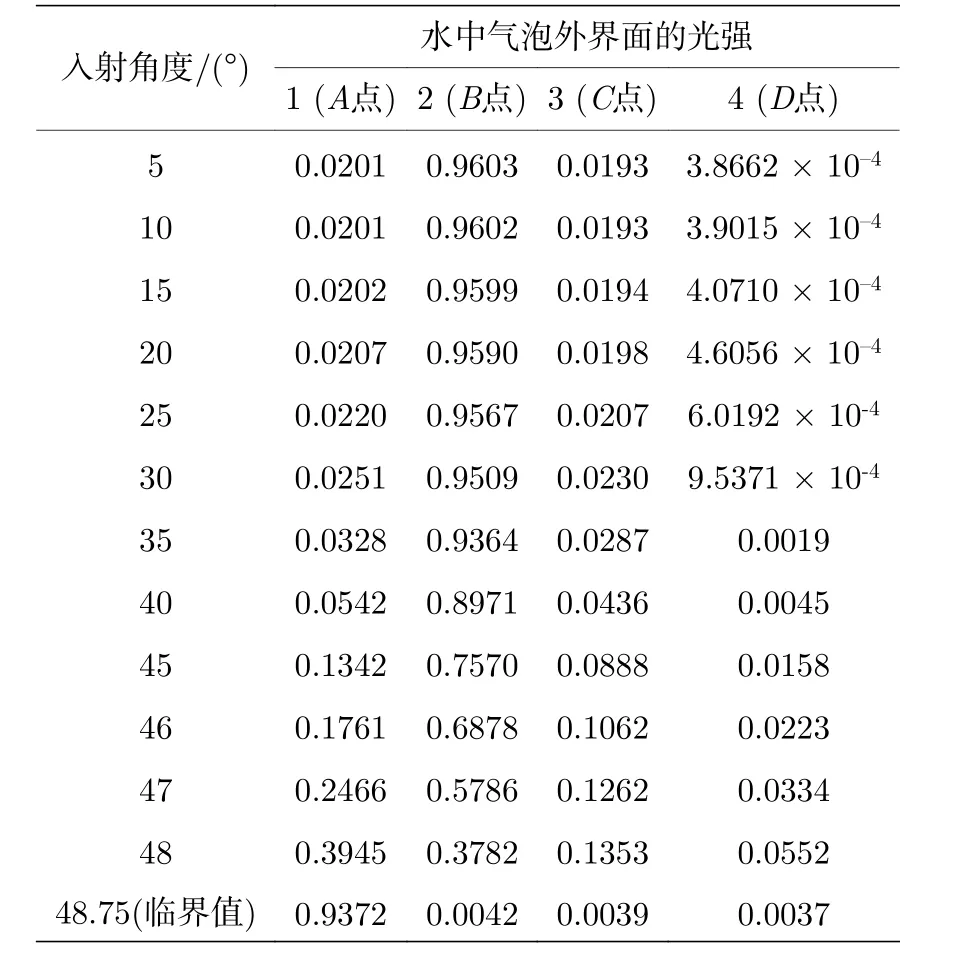
表1 水中气泡外界面多次反射、折射后的强度变化Table 1. Intensity of the bubble external interface with multiple reflection and refraction.
当光线以一定的入射角入射时, 第n次反射光线和折射光线的偏振度为

根据(4)式—(6)式可以依次计算出入射光源在气泡A点处(第一次)、B点处(第二次)、C点处(第三次)、D点处(第四次)的出射光偏振度大小及其变化趋势, 如表2所列.
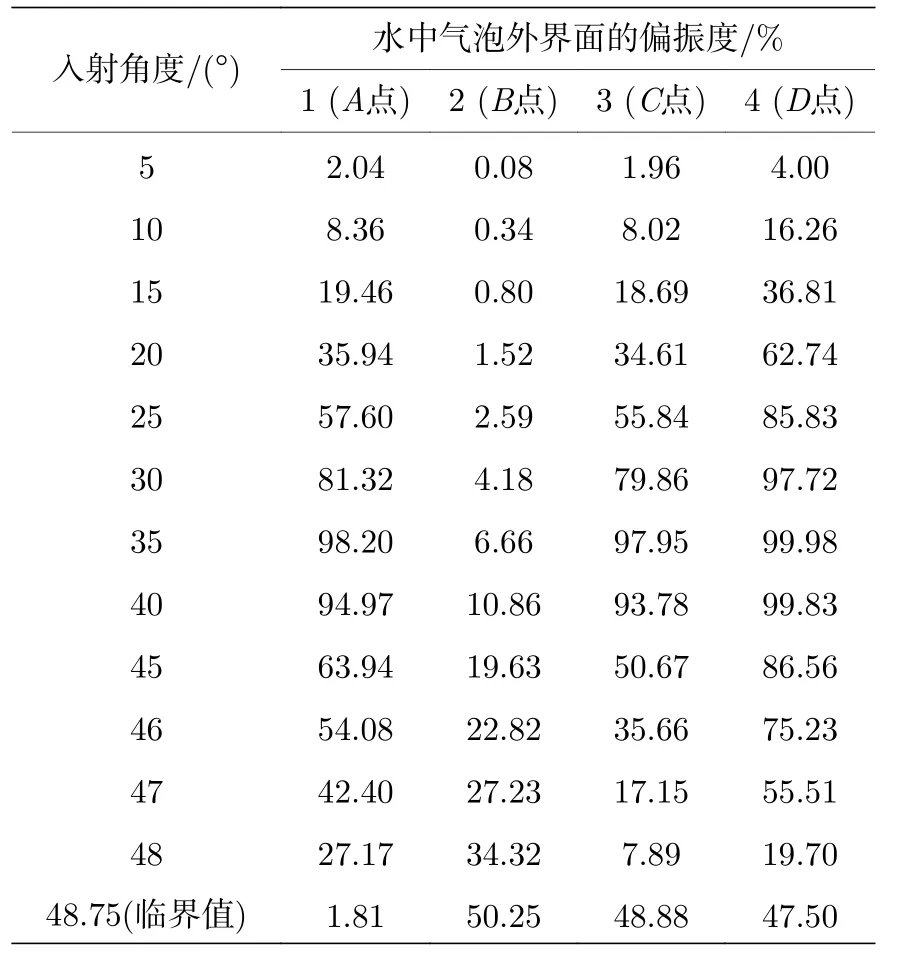
表2 水中气泡外界面多次反射、折射后的偏振度变化Table 2. The DOP of the bubble external interface with multiple reflection and refraction.
由表2可知, 在气泡A点、C点、D点处, 随着入射夹角的增大, 气泡外界面反射光线和折射光线的偏振度都先增大后减小, 在35°—40°之间, 三处的偏振度同时达到最大值;B点处的偏振度随夹角变化而一直保持增大状态; 在入射角小于40°的时候, 除A点, 其他各处经多次内外界面传输后偏振度不断提高, 第4次传输时基本变成了完全偏振光;入射角大于40°至临界角, 除B点外, 其他各处经多次内外界面传输后偏振度不断降低, 在临界角附近因为全反射作用而发生数值突变. 通过分析得知, 光源在气泡界面传输后的偏振度对入射角度存有一定的敏感性, 入射夹角是影响气泡偏振特性的重要影响因素. 单个大气泡界面各处光强、偏振的变化规律将为气泡群的偏振光学特性分析奠定基础.
以单气泡理论分析为基础, 在不同气泡大小以及不同气泡厚度条件下, 利用蒙特卡罗仿真的方式对光线在气泡群中发生后向传输进行仿真[17]. 设置条件如下: 入射光为自然光[1, 0, 0, 0], 以气泡群厚度为横坐标轴, 气泡群的偏振度DOP为纵坐标轴, 经仿真后整理数据并绘制图表如图3所示.
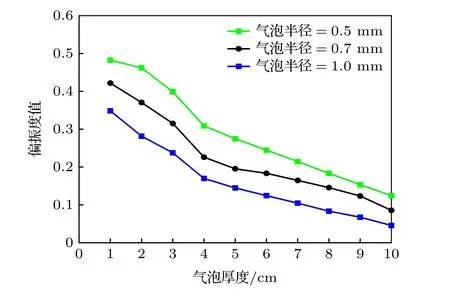
图3 不同气泡大小和厚度条件下的偏振信息变化趋势Fig. 3. Change trend of polarization information with different bubble size and thickness.
图3 中, 气泡群厚度增加对偏振状态的影响类似于气泡数密度增加, 等效于增加散射光单元在气泡群中发生多次散射的概率. 由仿真结果可以看出, 在入射光为自然光[1, 0, 0, 0]的情况下, 随着气泡群厚度的增加, 后向传输光的偏振度会不断减小; 随着气泡群中单个气泡半径的增加, 后向传输光的偏振度整体均值会不断减小, 三种不同半径的气泡偏振度下降趋势保持一致.
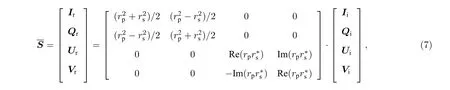
光入射到目标表面, 物体因其自身属性的不同会具有不同的偏振特性. 物体表面反射光的偏振状态不仅与物体表面的粗糙度、阴影、形状等特性相关, 还与入射光的偏振状态、入射角度、波长等因素相关. 根据入射光的电场分量与Stokes矢量之间的定量关系, 以及Jones矩阵和Mueller矩阵之间的定量关系, 金属目标表面的反射关系如下:
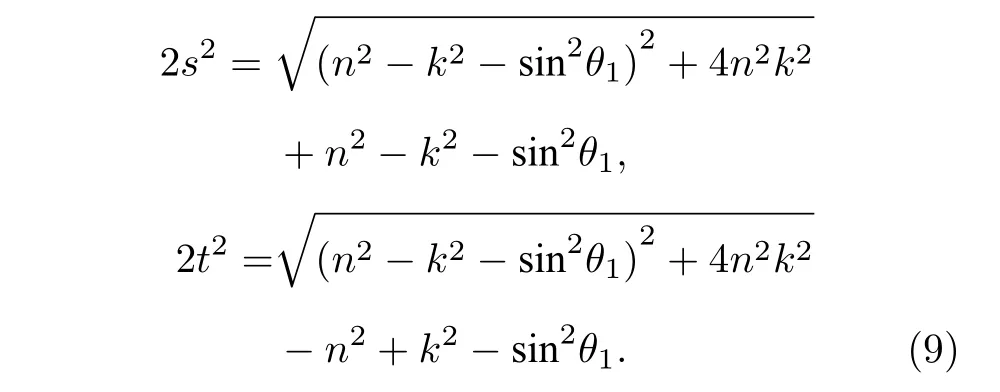
其中, Fresnel反射振幅比rs,rp的表达式表示为

其中,θ1为入射角,n1为入射介质的折射率(本文介质为水, 取值1.33),n-ik为目标反射面的反射系数,t和s的表达式为
由(7)式可以看出, 光滑目标表面单次反射的Mueller矩阵元素取决于Fresnel反射振幅比rs和rp. 由于非电导材料(绝缘体)和导电材料表面反射系数的不同会导致Mueller矩阵中的m34和m43项数值有所差异, 这种方法可辨别出非电导材料和导电材料; 同理, 通过目标表面反射光S, P分量的相位角差可以区分金属目标和非金属目标[18]; 在不同波长的入射光照射下, 不同材质的金属目标具有不同的反射系数[18]. 所以, 通过目标表面反射的偏振特性不仅可以区分金属目标和非金属目标, 还可以对不同材质的金属目标进行简单的分类. 在水下环境中, 当垂直入射非偏振光时, 随光源入射角度的改变, 不同材质目标物(铜材质、铝材质、铁材质)[19]的偏振信息变化情况如图4所示.
由图4可以看出, 在水下环境中, 随着光源入射角的增大, 金属的S分量缓慢增大到1, P分量通常先减小, 达到一定角度后迅速增大到1; 关于偏振度方面, 当金属表面属于理想光滑时, 只会发生Fresnel镜面反射, 且金属表面反射光的线偏振度会随入射角的增加而增大, 入射角等于Brewster角时偏振度达到最大值; 当入射角继续增加到接近90°时, 反射偏振度随入射角的增加而减小[19].可以看出, 不同材质的目标物具有不同的偏振特性.

图4 不同材质目标表面的S, P方向的反射比率曲线和偏振度变化趋势 (a) 铜材质; (b) 铝材质; (c)铁材质Fig. 4. Reflectance curve of the different target’s surface and the change trend of DOLP: (a) Cuprum; (b) aluminium;(c) iron.
与一般的水下偏振成像过程中通过理论推导构建目标复原模型不同, 气泡环境下的偏振探测系统获得的图像光强信息来源较为复杂, 主要包括四个部分: 一是目标反射光穿过水体并发生衰减后得到的直接传输部分; 二是发射光源进入气泡群中发生后向传输形成的背向杂光; 三是目标反射光与气泡群发生作用形成的前向杂光; 四是没有经过气泡反射而直接由周围介质散射进入成像系统的散射光强. 为构建水下光传输模型, 将四个部分进行线性组合, 如下式所示:

式中Itotal(x,y) 表示成像系统直接获得的光强图像,即气泡群干扰下的模糊图像;D(x,y) 表示目标表面处反射的光经过水体介质(未经过气泡群内部传输)衰减后到达成像系统的光强;F(x,y) 为目标表面反射回来的光经过气泡群前向传输到达成像系统的光强;B(x,y) 为发射光源进入水下气泡群进行后向传输产生的背景杂散光,K(x,y) 为没有经过气泡群而由水体介质散射进入成像系统的散射光强. 传输过程模拟图如图5所示.
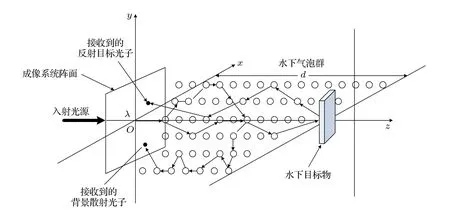
图5 光子在含有目标物的气泡群中传输过程模拟图Fig. 5. Simulation diagram of photon transport process in bubble group containing target.
光源传输过程如下: 假设有一束准直光源入射至含有目标物的气泡群中, 光线进入第一个单气泡内界面发生反射并折射出气泡外界面, 然后进入下一个单气泡内界面发生多次反射并折射, 依此类推, 最后出射光线与水中目标物接触, 发生反射后携带目标信息再次进入气泡群中传输, 最终到达水下成像系统. 与光线在不含目标的气泡群中传输相比, 由于增加了与目标的作用, 其偏振信息与气泡群区域的偏振信息会有所不同.
气泡群与人造目标物具有截然不同的偏振光学特性. 经仿真发现, 一定入射角度范围内, 在气泡界面第4次折射后的光线变成了完全偏振光; 光线在气泡群中随着气泡厚度和气泡大小的增大呈规律性递减; 目标的偏振特性与自身的材质以及入射光源的入射角度和波段的选择有关, 通过在复杂环境下探测目标与背景偏振信息的差异, 可以识别出目标并分类, 这也为基于主动光偏振成像技术实现气泡群中目标的识别创造了条件. 根据上述仿真和理论分析, 下面通过水下气泡实验和数据分析方式从多方面探究气泡群环境下目标的强度信息和偏振信息的变化规律.
3 实验方法与成像平台搭建
气泡群遮幕下的水下目标探测实验系统由透明玻璃实验水箱、探照灯光源、气泡群产生装置、多波段偏振成像接收系统、角度调整旋转平台以及数据采集和处理系统组成[20]. 气泡发生系统是采用多条气泡发生器纵向排列(每增加一条气泡条等效于气泡群密度增加1倍), 并通过旋转气泡发生器调节阀以控制气泡产生的数量. 水下目标物选择高分辨率板、金属制品、塑料制品、布制娃娃等多种材质的物品. 偏振成像接收系统由PHX050SP偏振相机和多波段滤光片转轮组成, 如图6(a)所示, 该系统采用同时成像的方式进行水下目标探测, 控制成像条件不变以及在相同的目标情况下,分别采集无气泡和有气泡时的图像. 根据水箱的大小和视场的实际情况, 确定焦距和视场角以便选择合适的成像镜头. 本文水下气泡实验的光源选择普通的高功率摄影探照灯, 光照可调且亮度较高, 适用于一般的水下目标探测场景. 实验前测得水箱水体的衰减系数为0.16 m—1. 根据上述的器材选择,构建水下气泡偏振成像系统如图6(b)所示.
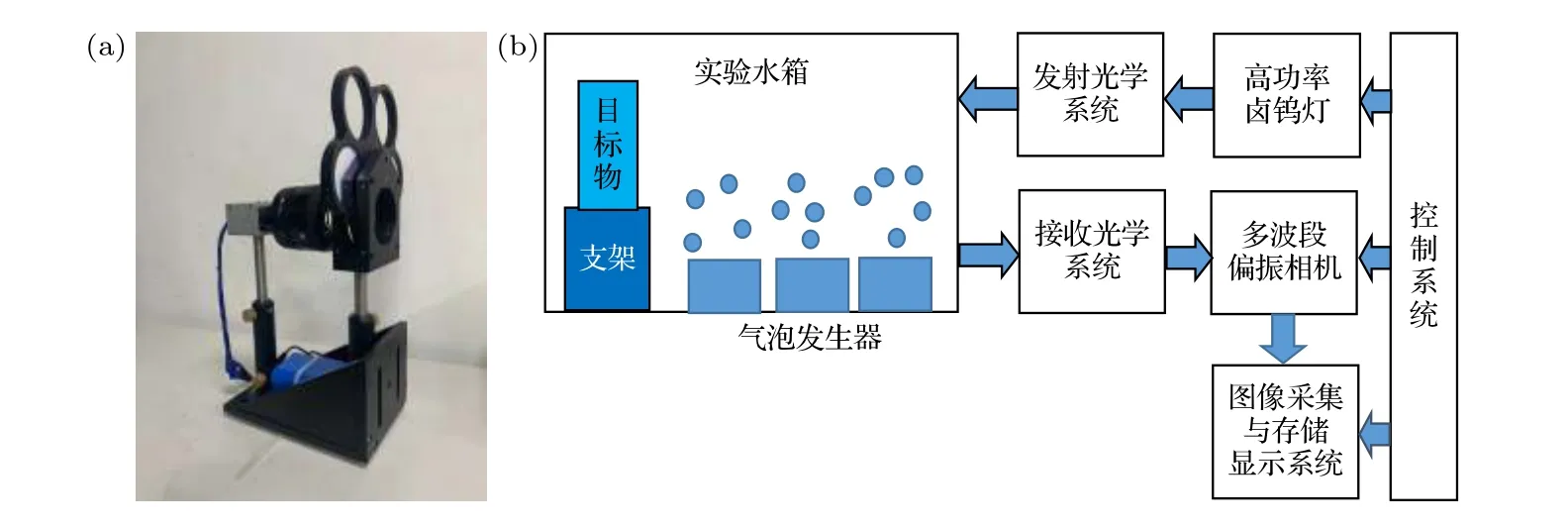
图6 偏振成像系统和水下气泡实验平台示意图 (a)多波段偏振成像系统; (b) 水下气泡偏振成像系统示意图Fig. 6. Polarization imaging system and underwater bubble experiment platform: (a) Multi-band polarization imaging system;(b) underwater bubble polarization system.
多波段成像系统采用的偏振相机型号为PHX050S-P, 该相机在像素上添加了偏振滤光片, 每个2 × 2像素阵列上有4个不同方向的偏振滤光片(0°, 45°, 90°和135°), 可以输出合成强度图S0及0°, 45°, 90°和135°四个方向的偏振辐射图, 也可输出实时偏振度图和偏振角图, 集成化较高, 且成像分辨率为2448 pixel × 2048 pixel. 在水下气泡实验中, 为了达到更好的气泡图像采集效果, 该偏振成像系统的曝光时间设置为33 μs并一直固定不变.
水下气泡实验在室内条件下进行, 气温23 ℃,气泡模拟器位于水槽底部(水深0.5 m), 所拍摄气泡群位于水面下0.3 m.
4 实验结果处理与分析讨论
图7 是利用多波段水下偏振成像系统采集到的不同气泡密度条件下的强度图像, 目标区域为清晰的彩色分辨率板, 将发射光源强度、相机曝光时间、镜头焦距、入射夹角等条件保持不变, 通过控制气泡发生器中气泡条开关数目以产生不同气泡群密度, 气泡条数目1, 2, 3分别对应低密度气泡群、中密度气泡群、高密度气泡群.

图7 不同气泡密度影响下的图像采集 (a)无气泡图像;(b)低密度气泡图像; (c)中密度气泡图像; (d)高密度气泡图像Fig. 7. Image acquisition under the influence of the different density of bubbles: (a) No bubble; (b) low density;(c) medium density; (d) high density.
气泡群的存在会影响水下目标的清晰成像, 并且某些目标区域的气泡相对较为明亮, 某些区域的气泡亮度相对较暗, 导致目标区域的分辨率降低.下面从多个方面研究气泡对水下目标成像的影响.
4.1 光源入射夹角变化对目标成像的影响
实际的水下目标探测中, 在其他条件保持不变的情况下, 入射光源与成像系统相对于水下目标所呈夹角的大小往往会影响水下目标成像效果. 所呈夹角越小, 目标反射光进入成像系统的能量越小,目标成像越暗, 所获取的偏振信息越少; 当夹角慢慢增大到理想情况, 光源发生镜面反射进入成像系统, 此时的反射光是线偏振光, 振动方向为垂直入射面, 所获取的目标图像最清晰、偏振信息最多;当夹角再增大时, 目标反射进入成像系统的能量慢慢减少, 图像变暗, 从而影响水下目标的观测. 水下气泡成像结构示意图如图8所示.
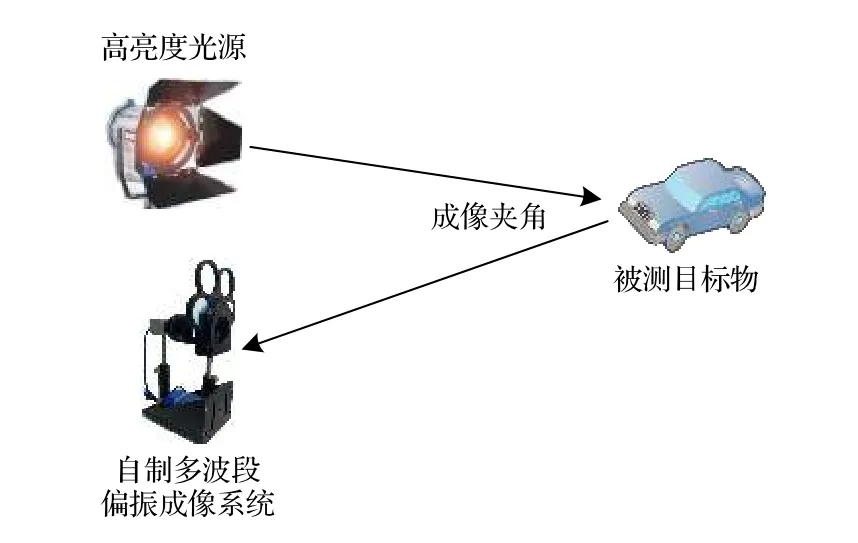
图8 水下气泡成像示意图Fig. 8. Diagram of underwater bubble imaging.
设置实验条件如下: 水中的气泡密度为中密度, 多波段偏振成像系统设置为宽波段成像, 发射光源强度为3挡, 成像系统光圈、相机与水下目标的距离等条件保持不变, 整个实验逐步改变旋转台角度大小(以10°为步长, 变化范围为60°—120°),并通过成像系统同时采集4幅不同偏振化方向下的强度图像. 利用偏振成像软件采集图像、偏振计算并进行伪彩色处理, 得到的结果如图7所示(选取夹角角度为60°, 90°, 120°).
图9(a)每一列分别表示不同夹角下的合成强度辐射图, 第一行表示无气泡强度信息图, 第二行表示有气泡强度信息图; 图9(b)每一列分别表示不同夹角下的偏振度伪彩色信息图, 第一行表示无气泡偏振度信息图, 第二行表示有气泡偏振度信息图. 由图可知, 气泡群和水下目标的偏振特性会随着成像夹角的不同而有所不同. 因为气泡群和目标发生镜面反射的固定角度不同, 导致夹角的变化对两者偏振信息的影响程度也有所差异. 当夹角较小时, 考虑到相机内部暗电流等干扰因素, 并且会有较少光线在气泡群内部的单气泡中发生折射和反射后进入成像系统中, 所以气泡群区域背向光偏振度偏小, 并遮蔽目标区域; 当夹角为90°附近时, 相机内部噪声受到偏振成像的抑制, 无气泡的偏振度图中目标区域和背景区域的对比度较好, 加入气泡群之后, 由于气泡和目标两者偏振特性的差异, 目标的成像效果依然较佳; 随着成像夹角的再次增大, 虽然无气泡的偏振度图像对比度较高,但是气泡的偏振度数值随夹角的变化而不断增大, 使得目标区域偏振成像受到一定的干扰,视觉效果存在失真. 此实验证明了同一材质的目标物会随着光源入射角度的变化而表现出不同的偏振特性,且在90°左右成像为最佳.
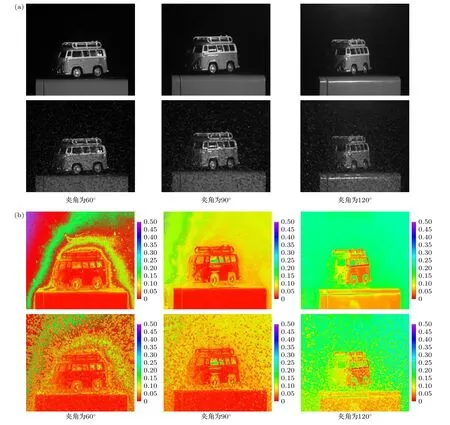
图9 不同夹角下的目标强度和偏振信息变化图 (a)不同夹角下的强度辐射图; (b)不同夹角下的偏振度信息图Fig. 9. Strength and polarization information of underwater target under different angles: (a) Intensity figure under different angles;(b) DOP figure under different angles.
4.2 不同成像波段对目标成像的影响
设置如下的实验条件: 水中的气泡密度为中密度, 入射光源与成像系统相对于目标所呈夹角为90°, 探照灯的发射光源强度为3挡, 实验过程仅改变多波段偏振相机镜头前方的滤光片转轮.
图10中每组图像代表一种材质, 其中图10(a)的每一列分别表示波段为550 nm、670 nm以及宽波段条件下目标材质1的有气泡合成强度图和有气泡偏振度图, 同理, 图10(b)表示目标材质2的有气泡合成强度图和偏振度图. 观察图10可以发现, 由于不同的波段在水下传输过程中能量衰减程度和传播距离不同, 气泡群中目标成像的效果也各不一致. 在550 nm波段中, 水下目标的强度图较为清晰, 石制雕像(材质1)和铁质玩具车(材质2)在细节方面也优于其他波段, 但可以明显看出存在表面涂层失真的现象; 550 nm波段和670 nm波段的偏振图中目标物的偏振信息受到气泡群偏振信息的遮蔽, 目标和背景区域对比度不高. 当波段为宽波段时, 偏振度图中目标和背景区域的对比度最好, 受到的气泡群影响最小. 气泡群和水下目标物在不同的入射角度、成像波段条件下, 显示不同的偏振特性, 这为复杂水下气泡环境中的物体识别创造了条件.
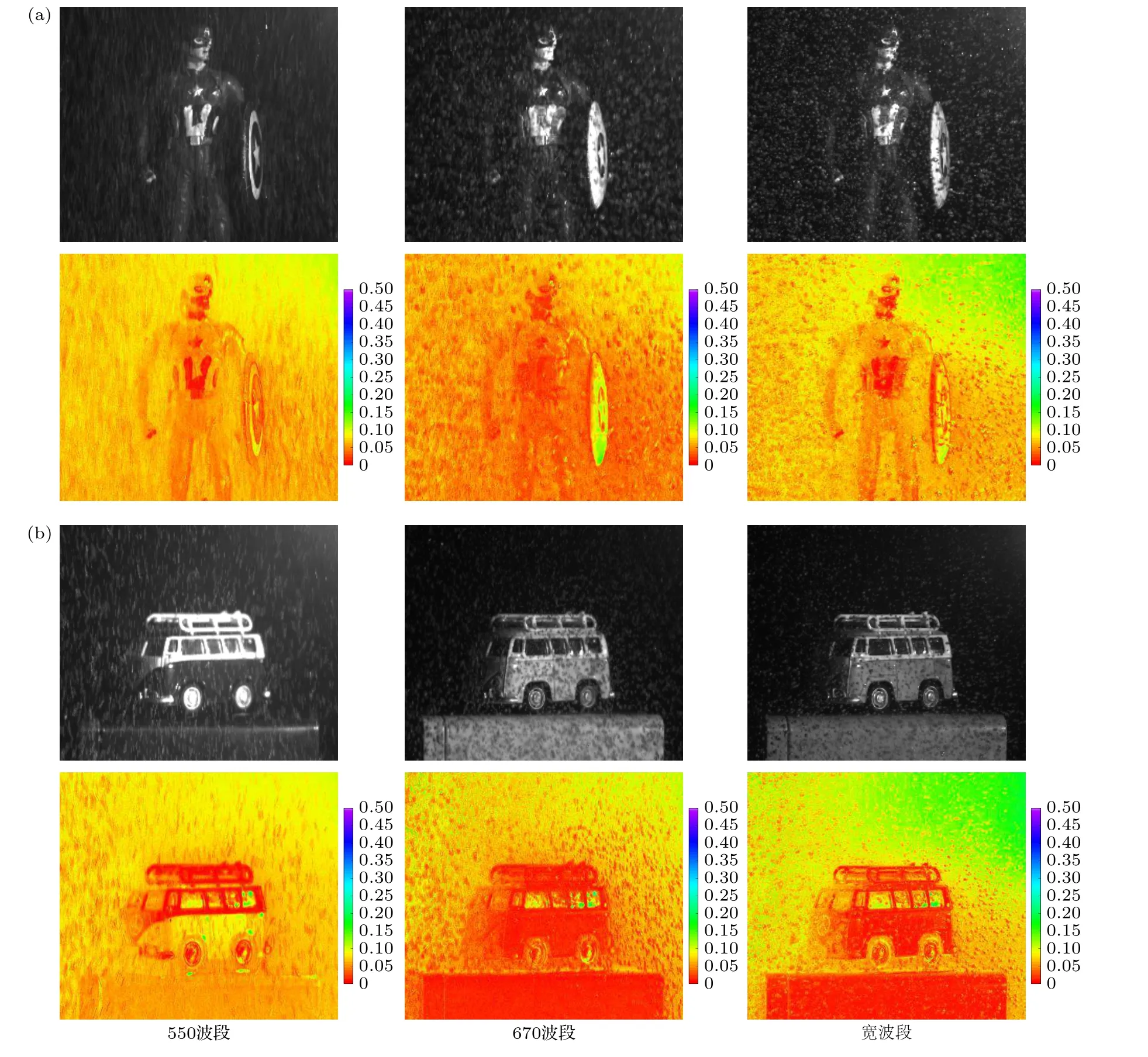
图10 不同波段条件下的水下目标成像情况 (a)材质1; (b)材质2Fig. 10. The underwater target imaging under the condition of different bands: (a) Material 1; (b) material 2.
4.3 水下气泡群对不同典型金属材质目标成像的影响
气泡群对不同典型材质的水下目标强度信息和偏振信息的影响程度, 迄今还未有相关研究资料. 设置实验条件如下: 入射光源与成像系统相对于水下目标所呈夹角为90°, 成像波段为宽波段,水中的气泡密度为中等密度, 探照灯的发射光源强度为3挡, 其他所有条件保持不变, 整个实验仅改变水下目标的材质(从左到右分别为铁片、铝片、黄铜片、紫铜片), 如图11所示.
图11为水下气泡实验所采用的不同材质金属目标物. 采集后的原始图像经计算和处理, 得到图12所示的强度信息图和偏振信息图.

图11 不同材质目标物 (a)铁片; (b)铝片; (c)黄铜片; (d)紫铜片Fig. 11. Object of different material: (a) Iron sheet; (b) aluminum sheet; (c) brass sheet; (d) copper sheet.
图12中每一行的第一幅图和第二幅图分别表示为同一材质的无气泡和有气泡合成强度信息图,每一行的第三幅图和第四幅图分别表示同一材质的无气泡和有气泡的偏振度信息图. 通过观察可以发现, 在成像夹角为90°、成像波段为宽波段的条件下, 各类材质的偏振信息图能较好体现普通光强图像无法展示的细节信息, 并可以通过目标与背景偏振信息较大的差异来增强目标对比度、改善成像质量, 达到抑制背景噪声、获取目标细节特征、识别目标等目的.
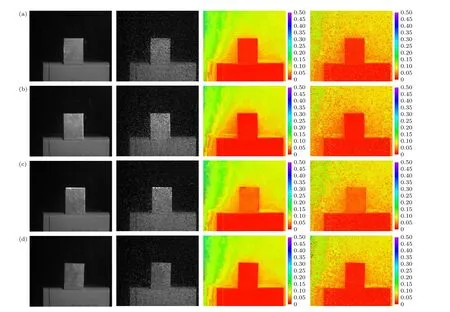
图12 不同材质目标物强度信息图和偏振信息图 (a)铁片; (b)铝片; (c)黄铜片; (d)紫铜片Fig. 12. Intensity and polarization information of different material: (a) Iron sheet; (b) aluminum sheet; (c) brass sheet; (d) copper sheet.
实验中除了目标物的材质不同, 其他方面均保持一致. 图13是利用统计学方式对各类材质的图像进行定量化数据分析而生成的直方条形图; 通过多次区域截取操作和统计计算得到气泡群区域的强度均值和偏振度均值、目标区域的强度均值和偏振度均值. 由图13可以看出, 在气泡群的影响下,大部分目标材质强度信息均有不同程度的减小, 但是减小的幅度各不相同, 铁片强度信息减幅最大,铝片强度信息减幅最小; 由于实验中主动光源和材质反射率的影响, 光源产生的颜色与黄铜片的颜色具有一定的相似度, 因而该材质在气泡群的影响下强度信息不降反升. 关于偏振方面, 因为材质反射率的不同, 各类目标的偏振度值存有差异, 除了黄铜片外, 铁片偏振度值最大, 紫铜片最小, 当气泡群存在时, 偏振度数值均有小幅提升, 各材质的偏振度数值相对大小与第2节中目标反射率仿真结果基本一致. 根据第2节的气泡理论, 由于光线在单气泡中第4次传输时变成完全偏振光, 光线发生多次折射和反射的几率增大, 因而气泡群区域的偏振度值会高于目标的数值, 此时的目标识别度较高;由图可以进一步看出气泡群的存在与否对于金属材质目标物的偏振度影响较小,数值变化不大.探究气泡群遮幕下的不同材质强度和偏振度的变化趋势可以为未来的水下目标材质识别和分类提供一定的参考.
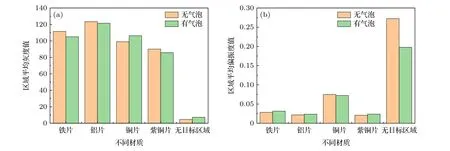
图13 典型金属材质的变化对目标偏振成像的影响 (a)不同材质目标强度信息统计分析; (b)不同材质目标偏振度信息统计分析Fig. 13. Influence of changes of the typical metal material on the target polarization imaging: (a) Target’s strength information statistics and analysis of different material; (b) target’s polarization degree statistics and analysis of different material.
4.4 不同气泡群厚度对水下目标成像的影响
气泡群厚度的变化会影响水下环境中目标成像的效果. 设置的成像夹角、波段等实验条件与第4.3节一致, 整个实验过程仅改变水中的气泡厚度大小. 采集的偏振图像经计算处理, 得到如图14所示的强度信息图像和偏振度伪彩色图.
图14的两组图像中, 图14(a)表示不同气泡群厚度的合成强度图, 图14(b)表示不同气泡群厚度的偏振度伪彩色图, 密度后面的数值代表气泡条的数目, 数值越大, 气泡条数目越多, 水中产生的气泡厚度也越大. 通过观察可以发现, 强度图像中目标外部被遮蔽的阴影部分能够在偏振信息图像中清晰可见; 气泡群厚度越大, 对水下目标成像的影响也越大; 在高密度气泡中, 气泡的偏振信息几乎遮蔽了目标的偏振信息, 使得目标识别更加困难.
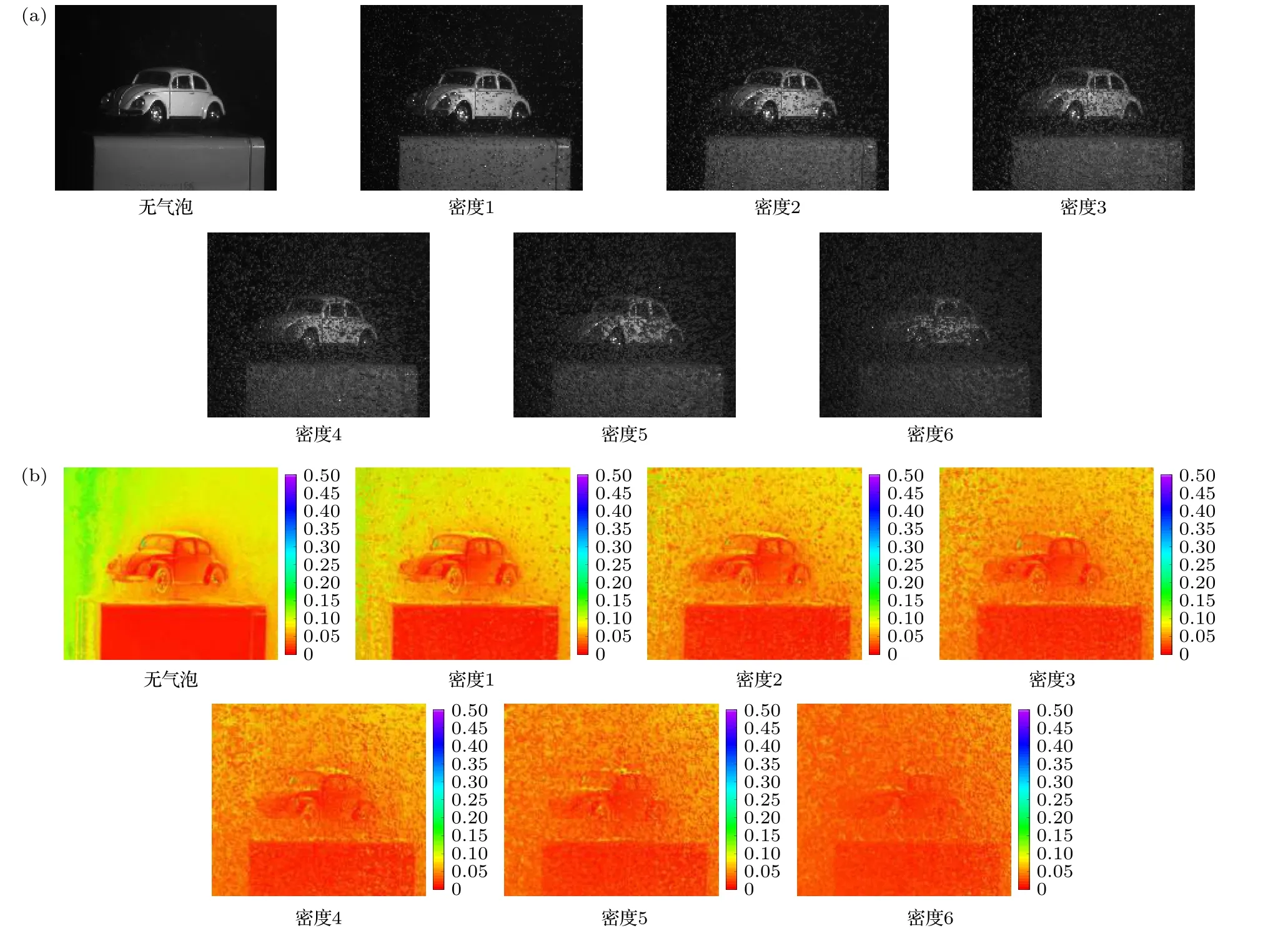
图14 不同气泡密度下的强度图和偏振信息图 (a) 强度图; (b) 偏振度图Fig. 14. Figure of intensity and polarization information under different bubble density: (a) Intensity’s figure; (b) DOP’s figure.
图15是利用统计学方式对不同气泡群密度条件下水下目标成像图进行定量化数据分析后生成的点线图. 图像截取操作和求均值计算与第4.3节保持一致. 观察可知: 随着气泡厚度的增加, 目标区域强度呈现逐级递减规律, 气泡区域缓慢递增;因为材质反射率低, 所以目标区域偏振度较小且变化缓慢, 但气泡偏振度数值呈逐步递减并接近目标区域、目标信息识别受限. 由于增大气泡群厚度会导致入射光线在气泡幕外界面直接发生反射进入成像系统的几率增大, 反射的光线增多, 因而会使气泡区域强度值缓慢增大; 同样, 气泡厚度的增大提高了光子在气泡外层的碰撞概率、气泡层的有效传输厚度减少、加速了退偏振效果[10], 所以气泡区域的后向传输偏振度数值会逐级递减. 本实验结果中偏振度变化趋势曲线与第2节气泡群仿真结果基本一致.
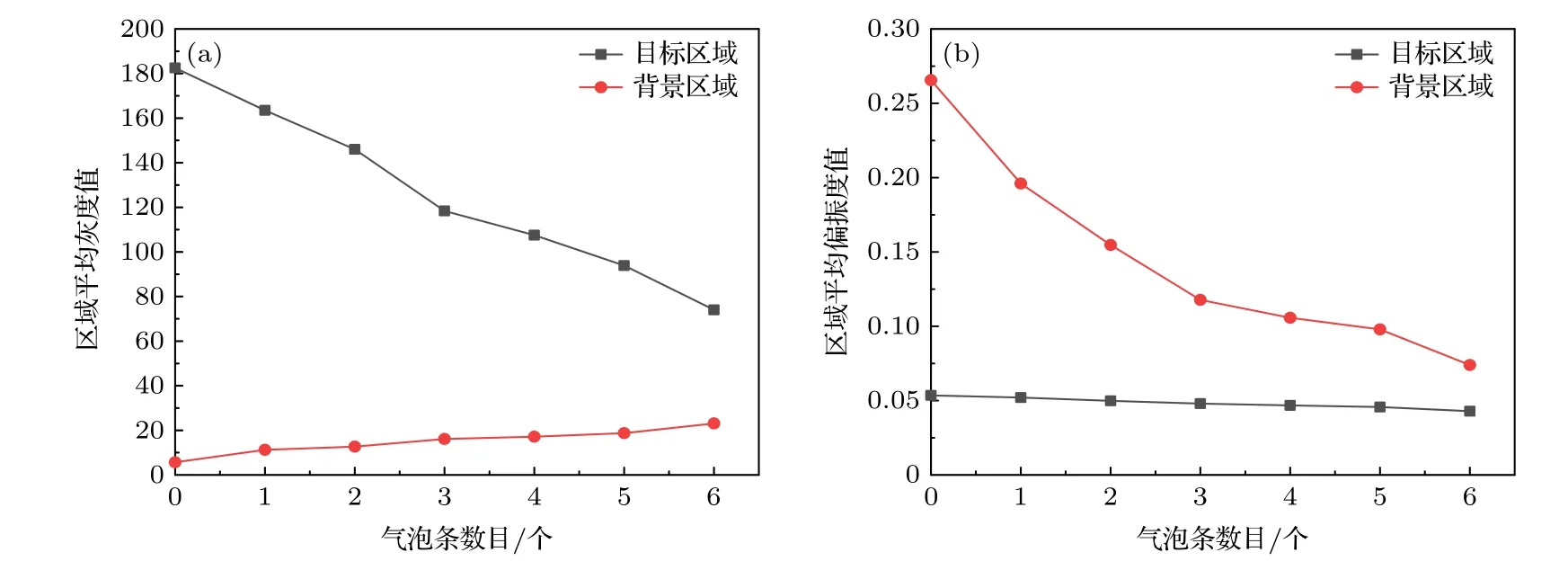
图15 气泡群厚度对水下气泡目标偏振成像的影响 (a)强度信息变化趋势图; (b)偏振度信息变化趋势图Fig. 15. Bubble group density effects on the underwater bubble target polarization imaging: (a) Trend chart of intensity information; (b) trend chart of DOP information.
4.5 不同成像分辨率对水下目标成像的影响
不同成像分辨率的选择对水下目标成像会有一定程度的影响[21]. 实验场景设置与第4.3节一致, 整个实验过程仅通过控制成像系统与水下气泡环境中目标物距离的方式来调节成像分辨率的大小, 距离越近, 成像分辨率越高; 距离越远,成像分辨率越低. 采集图像并截取目标内部相同的位置, 如图16所示, 当成像分辨率增大时, 气泡的存在对目标的成像干扰越大, 目标的识别率降低.

图16 不同成像距离条件下的水下目标内部细节图 (a) 0.5 m; (b) 0.6 m; (c) 0.7 m; (d) 0.8 m; (e) 0.9 m; (f) 1.0 mFig. 16. The underwater target details views under the condition of different imaging distance: (a) 0.5 m; (b) 0.6 m; (c) 0.7 m;(d) 0.8 m; (e) 0.9 m; (f) 1.0 m.
对图16所示的气泡环境中目标细节图做进一步的定量化评价分析, 结果如表3所列.
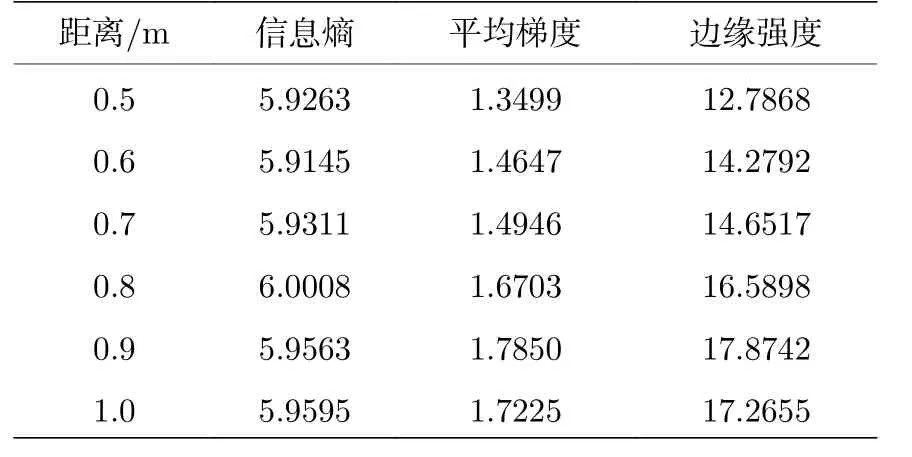
表3 不同成像分辨率条件下的图像评价指标Table 3. Image evaluation index under the condition of different imaging resolution.
由表3可以看出, 图像的质量和细节识别效果会因图像分辨率的改变而发生相应的变化, 也证明了在一定程度上分辨率越高, 图像质量和识别效果不一定越好. 因此, 选择合适的尺度和分辨率对于水下目标成像探测具有重要的意义.
5 利用偏振图像融合方法抑制气泡群对水下目标成像的影响
根据上面的探究结果, 当入射夹角为90°、波段为宽波段时, 目标可视度最佳、图像对比度最好.本节将进一步探究并考虑利用合成强度图和偏振度图进行相应的融合处理, 获得目标信息更为突出的融合图像, 以抑制气泡对水下目标成像的影响[22]. 所用算法基于水下目标偏振特征提取与视觉信息保留的图像融合方法.
为获取全局水下背景图像B(x,y) , 先将原始总光强图I(x,y) 进行滤波处理, 滤波算法如下式所示:

其中,S0(x,y) 是实验成像系统接收的光强图,median(·) 表示中值滤波,S0m(x,y) 表示原始总光强图S0(x,y) 经(11)式滤波后的图像,p是比例参数,p取0.95时滤波算法结果较好[23].

式中,sv是指中值滤波的邻域尺寸取值, 表示为sv=2×floor[max(size(I))/25]+1.
由于在含有气泡的水体环境中, 光线散射严重, 或者水下光线弱而使目标成像较暗, 因而进一步采用亮度增强融合算法提高目标物的亮度和清晰度, 抑制气泡群对目标区域的影响, 从而提高图像的成像质量. 亮度增强融合算法具体如下:

D(x,y) 为原始总光强图S0(x,y) 与S0(x,y) 经滤波处理得到的全局水下背景图像B(x,y) 相差后的结果, 将目标图D(x,y) 与背景图B(x,y) 相比, 可以提高目标区域的灰度值, 进而提高目标区域的分辨率.
图17中第一行为原始强度图像以及对应的直方灰度图, 第二行为偏振融合图像及其对应的灰度直方图. 可以看出, 偏振融合结果图在主观视觉上比原始强度图更好, 阴影遮蔽的部分被很好地展现出来. 两者对应的灰度直方图也表现出偏振融合图效果比原始强度图更佳.

图17 目标1强度图、偏振融合图与灰度直方图 (a)强度图与对应直方图; (b)偏振融合图与对应直方图Fig. 17. Goal 1’s strength and gray histogram and polarization fusion: (a) Intensity and histogram; (b) polarization fusion and histogram.
根据图18的多组融合图像结果可以看出, 通过主观判断, 融合结果图优于原始强度图的视觉效果. 下面分别利用多种图像评价指标(表4)对原始强度图和融合图像质量进行定量化评价[22].
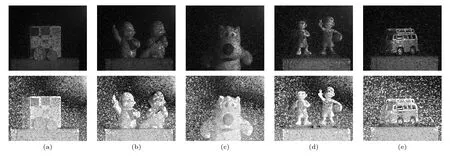
图18 第一行为中等气泡密度强度图, 第二行为偏振信息融合处理结果图 (a)目标2; (b)目标3; (c)目标4; (d)目标5; (e)目标6Fig. 18. The first behavior indicates intensity figure of bubbles medium density, the second behavior indicates figure of polarization information fusion processing results: (a) Target 2; (b) target 3; (c) target 4; (d) target 5; (e) target 6.
从表4中的评价指标可以看出, 由于气泡对整体成像有着一定的影响, 虽然融合后的图像在信息熵方面略低于原始前灰度图, 但是偏振融合后的图像的平均梯度、边缘强度、方差等评价指标远远高于原始强度图像, 因而该融合方法可以提高水下气泡环境中目标物的成像质量并抑制气泡对水下成像的影响.
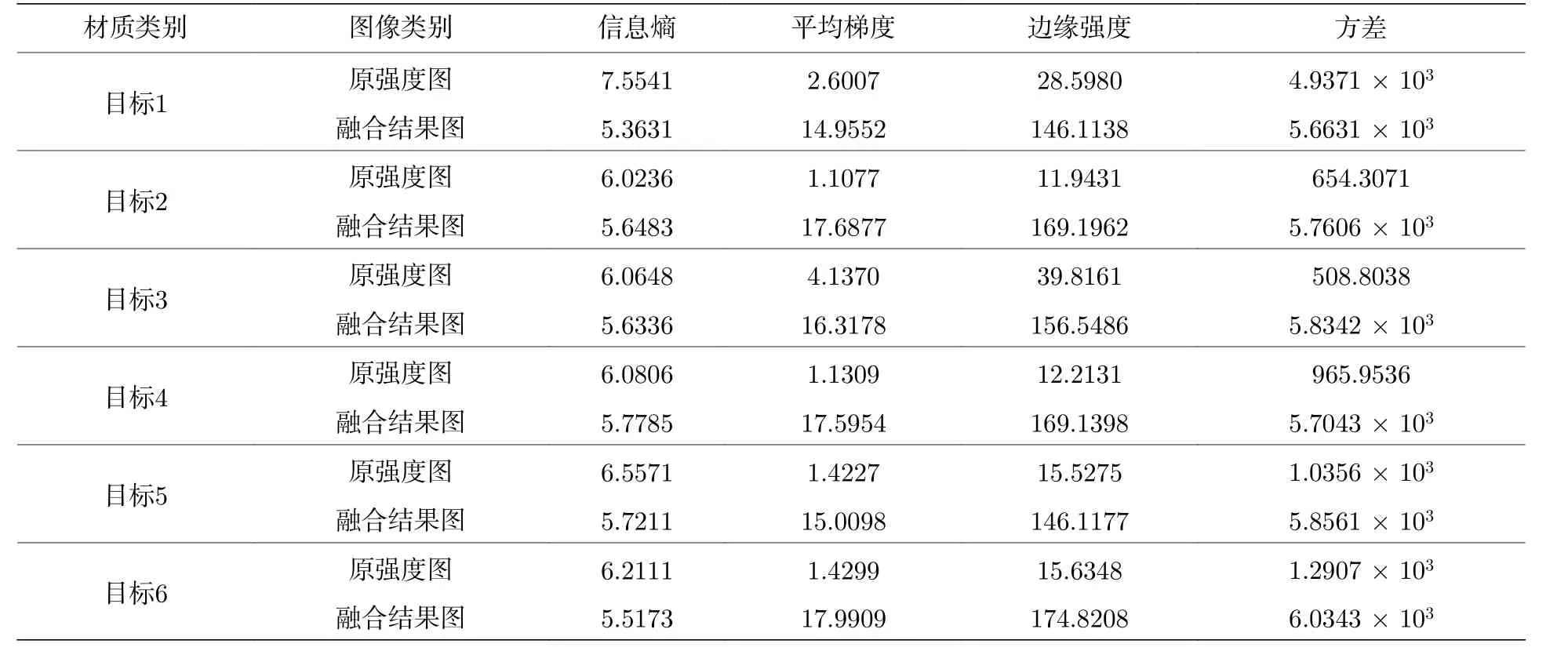
表4 图像评价指标Table 4. Image evaluation index.
6 结 论
本文从气泡理论推导与仿真、水下气泡平台搭建、气泡数据处理和数据分析、利用偏振图像融合方法抑制气泡的影响等方面构建了一个完整的气泡群环境下目标成像研究体系. 通过探究得到以下结论: 光源入射角度的变化和波段选择的不同, 在气泡群下的目标物和背景区域的偏振信息相对差值也会不同; 在同一气泡厚度条件下, 不同材质目标物的偏振度均有小幅提升; 随着气泡厚度的增加, 目标区域的强度信息和气泡区域的偏振信息呈比例衰减,但对低反射率目标区域的偏振度数值影响不大;当气泡厚度较高时, 强度成像和偏振成像技术都难以识别水下目标物. 为了进一步提高水下气泡群环境下的目标图像获取质量, 研究了不同成像分辨率条件下的水下目标成像以及偏振图像与强度图像的融合算法, 提出的基于水下目标偏振特征提取与视觉信息保留的图像融合方法可以较好地抑制气泡群对水下目标成像的影响, 目标信息凸出并能够清晰可见. 鉴于高密度气泡群环境中存在目标识别困难的问题, 未来将利用计算机仿真手段对光线在气泡中损耗能量进行补偿以实现目标识别或者机器学习的方法对图像进行复原处理.
