2-UPS/RPR并联机构运动学分析
2021-08-02周毅钧陈建鹏李特奇
周毅钧,陈建鹏,李特奇
(安徽理工大学 机械工程学院,安徽 淮南 232001)
2R1T少自由度并联机构由运动副与各个构件组成,其结构较为简单,因此具有载荷比高、误差小、精度高、动力充足等优点,且相对传统串联机构更有效,结构更紧凑,适用于工业生产、产品分拣等领域。针对2R1T少自由度机构,赵传森等提出了一种2-RPU/RPS并联机构,并求出其工作空间与奇异位形;李清等提出了一种SPR+UPS+UPR非对称并联机构,并利用三维动态法求解其工作空间;杨路等提出了一种2-UPS/RRP机构,并分析其运动学性能;王新宇等提出了一种2-PSR/UPU并联机构,并进行实例分析;张志良等提出一种3-PSP空间并联机构,并利用位置正逆解求其空间位置。研究提出的2-UPS/RPR并联机构可以用于贴码的喷涂。传统贴码喷涂由于其结构的限制,只适用于喷涂固定表面以及位置不变的产品,而本机构具有两转动一平移3个自由度,可适用于曲面等非平面产品的光滑喷涂。
1 机构的结构分析
1.1 机构描述
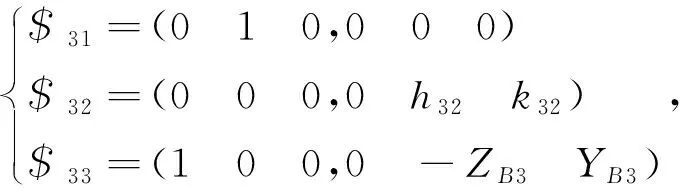
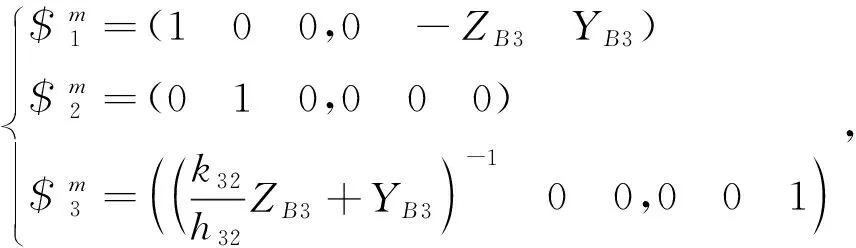
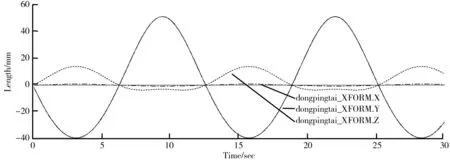
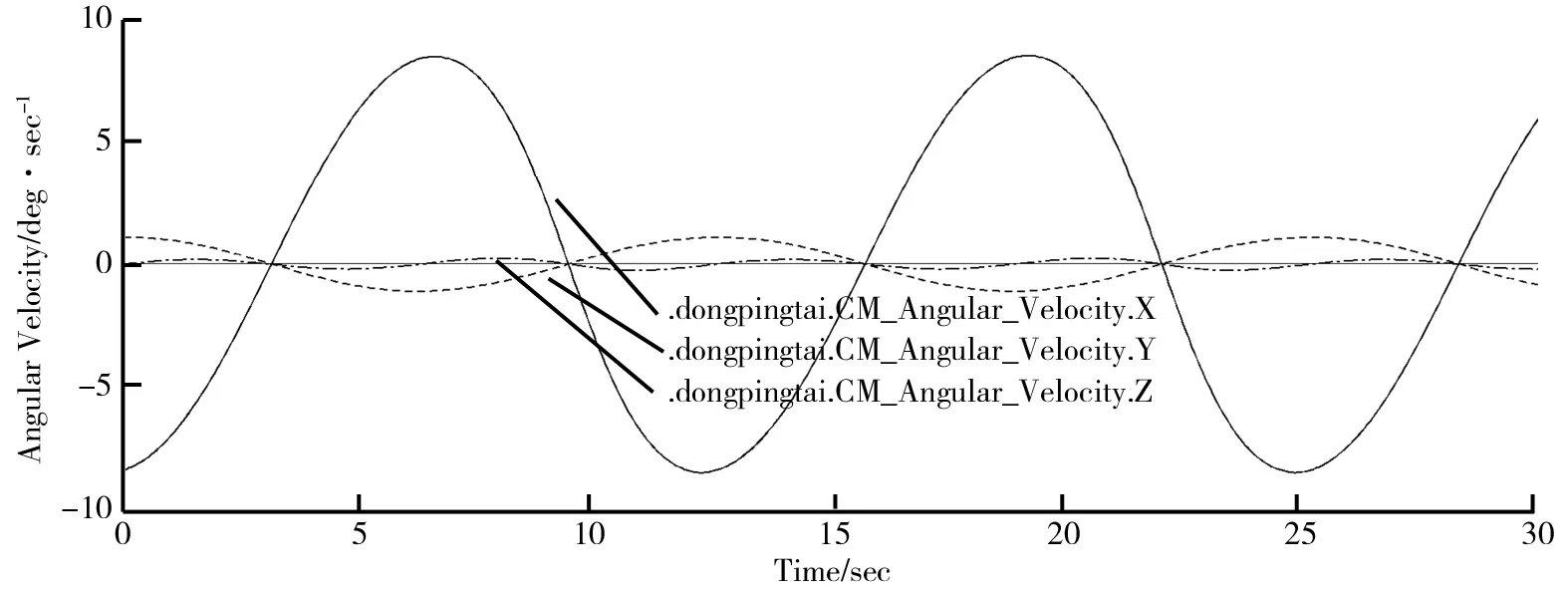
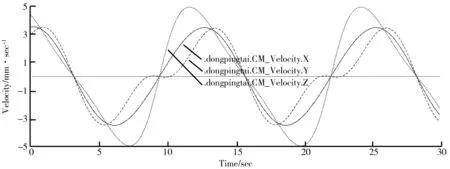
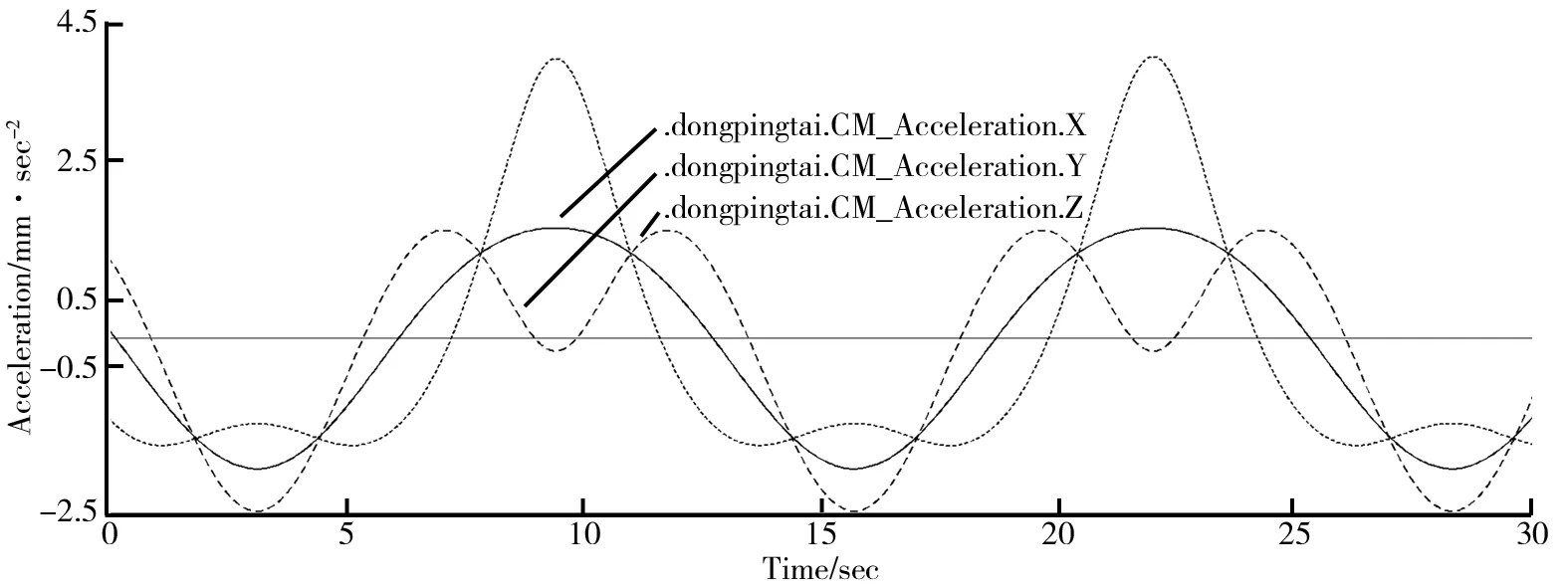
2-UPS/RPR并联机构由定平台、动平台、虎克副、移动副、球副、转动副组成,定平台与动平台之间通过两条UPS支链和一条RPR支链连接。UPS支链自下而上依次为虎克副(U)、移动副(P)、球副(S)。以第一条支链为例,虎克副(U)与定平台之间成一定的夹角,定平台与虎克副(U)相连,虎克副(U)上方连接一个方向向上的移动副(P),移动副(P)上连接一个球副(S),球副(S)与动平台相连。定平台是底边边长为2a,顶角为90°的等腰直角三角形。动平台是底边边长为2b的等腰直角三角形(b A A A B B B A A A U U R B B B S S R o xyz x x U z y o x y z x S z y x 图1 2-UPS/RPR机构模型图2 2-UPS/RPR机构简图 $ L M N P Q R $ L M N P Q R $ $ L P M Q N R L P M Q N R (1) 若两螺旋的互易积为0,则两螺旋互为反螺旋。在并联机构中,各分支运动螺旋数目与其对应的约束螺旋数目之和为6。对于2-UPS/RPR并联机构,先求得3条支链的运动螺旋系,然后根据互易积理论可得到与其对应的约束螺旋系,接着将3条支链的约束螺旋系合并后得到动平台的约束螺旋系,最后对其求反螺旋系,从而得到动平台的运动螺旋系。 第一条UPS支链共有6个运动螺旋,组成的运动螺旋系可表示为: (2) l m n ij i j l X Y Z $ 第三条RPR支链在定坐标系中的运动螺旋为: (3) 根据互易积公式,RPR支链的约束螺旋系有3个约束螺旋: (4) 根据3条支链的约束螺旋系得到动平台的运动螺旋系为: (5) 如果机构中运动螺旋数目超过6,则超出部分为并联冗余约束,所以过去常用的Grübler-Kutzbach(以下简称G-K)公式无法对所有机构求得正确的结果,因此对G-K公式加以修正,修正后G-K公式如式(6)所示。 (6) dof m N J f i ζ υ m λ λ m λ N J υ ζ dof 由G-K公式计算得出2-UPS/RPR并联机构的自由度为3,与螺旋理论计算出的结果一致。 P x y z z γ x α y β (7) O P P x y z (8) (9) s sin c cos OB OA OB l (10) l OB OA (11) 代入计算得: (12) 位置正解即根据驱动值求解动平台中心点位置参数,该方法是位置反解的一种逆运用。本例为一般构型,采用方法为数值分析法,将位置反解方程式整理得到动平台坐标系原点位置的求解方程: (13) 该方程为多元非齐次线性方程,常规求根公式无法求得该方程的解析解,但该方程在单根附近平方收敛,因此采用牛顿-拉夫逊迭代法对函数进行更新迭代,从而求得近似解,牛顿迭代公式如下: (14) l l l T T α β z J (15) 其中, (16) 对位置逆解方程两侧同时求导并加以整理得到: (17) 为了分析2-UPS/RPR机构在输入3个驱动函数下动平台变化的规律,在3条支链上的3个移动副设置驱动函数进行驱动,驱动函数如下: (18) x y z x y z 图3 位移变化曲线图 图4 角速度变化曲线图 图5 速度变化曲线图 图6 加速度变化曲线图 x y z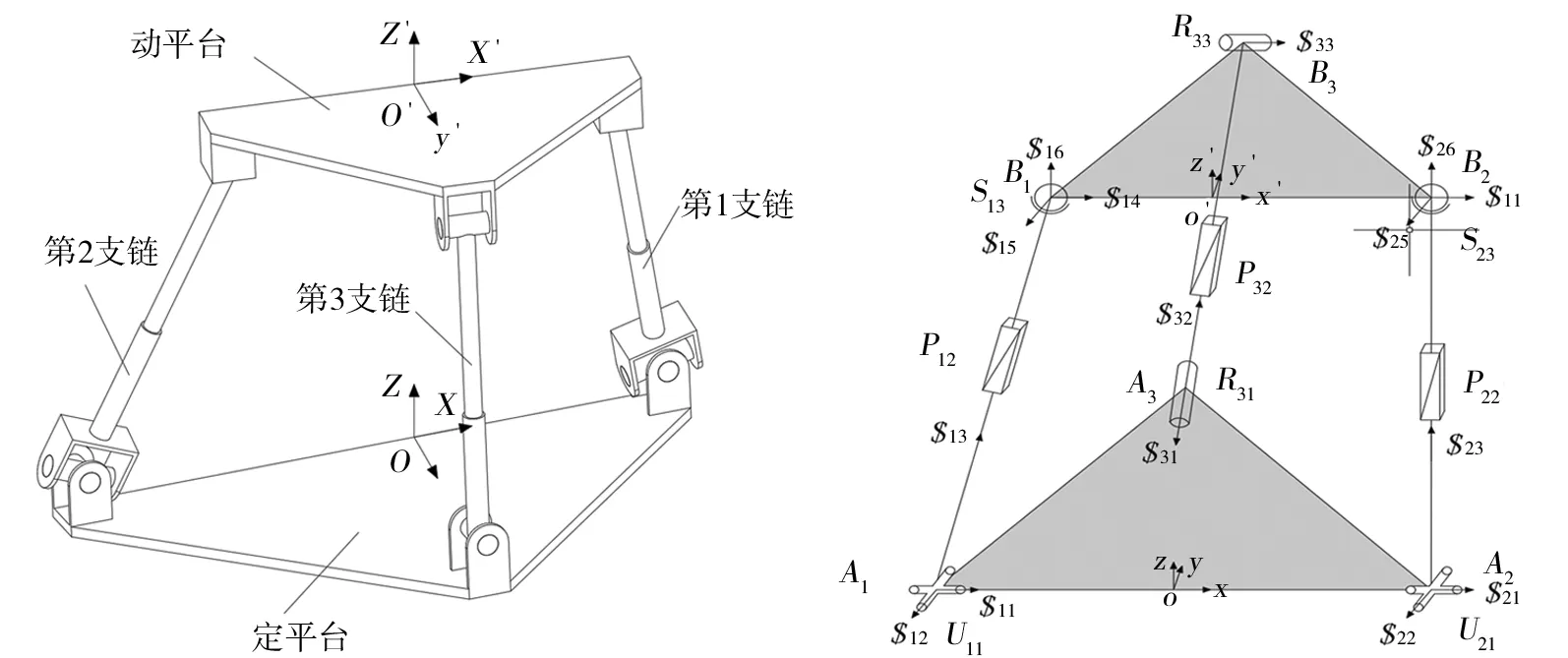
1.2 自由度运算
给定螺旋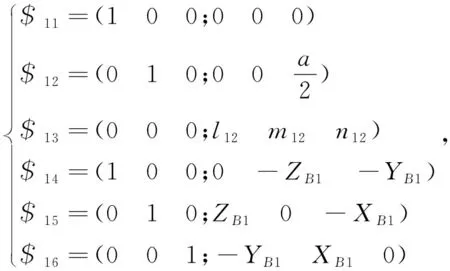



2 机构的运动分析
2.1 位置反解
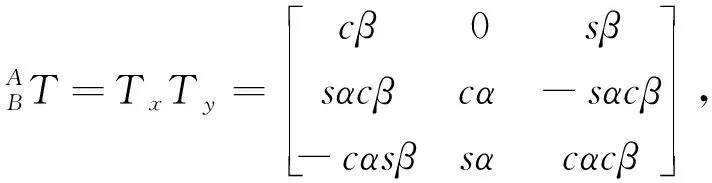
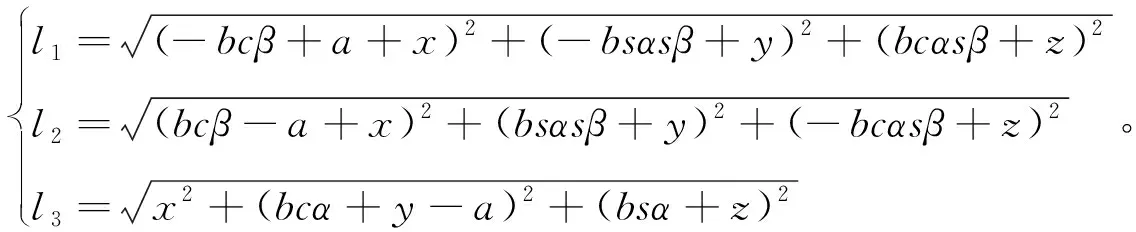
在动平台位姿确定后求其他构件运动状态为位置反解。将动平台中心点的位置设为


2.2 位置正解


3 速度雅可比矩阵分析
选取并联机构3条支链的移动副作为驱动向动平台输入速度,输出速度由雅可比矩阵来映射到动平台上。将位置逆解分别对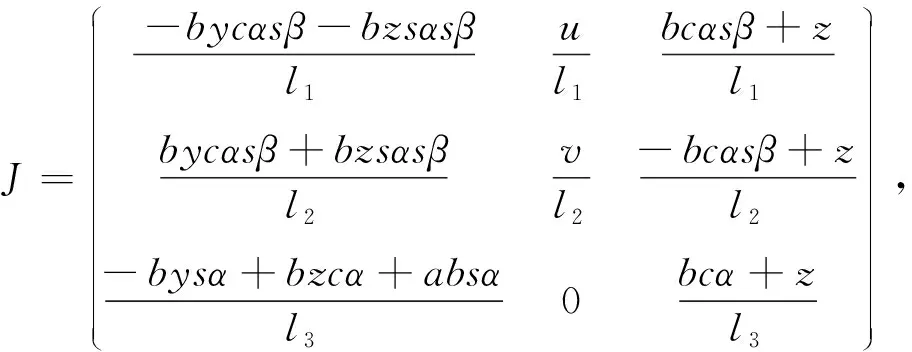


4 运动学仿真
5 结论
基于螺旋理论求得2-UPS/RPR并联机构存在绕
