多球碰撞型耗能减震器力学性能分析
2021-08-02何芝仙
高 超,何芝仙
(安徽工程大学 力学重点实验室,安徽 芜湖 241000)
结构的减震控制技术通常是通过隔振耗能装置来“疏导”地震发生时输入的能量,使主体结构本身承受很少的能量,从而保护主体结构免遭破坏。碰撞型耗能减震器由于其构造简单、制作容易、成本低等特点,被广泛应用于结构抗震。目前应用于结构抗震的碰撞型耗能减震器,按减震球个数可分为单球型耗能减震器和多球型耗能减震器。单球型减震器作为线性动力吸振器,在窄频带内表现优异,具有良好的效果,典型如台北101大楼的球形调质阻尼器,但减震球体积与重量大,制造安装不便。多球型减震器呈现非线性特征,相较单球减震器而言,它扩展了频带宽度,但在一定程度上失去了有效性。如张俊杰等提出了使用砂箱作为阻尼减震器的研究方案,其性能主要受制于砂的颗粒级配,砂子的级配不好,结果就不理想,且减震性能只能通过实验测试。M.Gharib等提出了一种线性粒子链冲击阻尼器,通过激励主系统使小球与大球多次碰撞耗散大量动能进而达到减震目的,但在特定的外力作用下会产生不利碰撞,进而对结构造成不利影响。S.Ekwaro-Osire等使用摆式冲击实验装置对多球冲击减震器吸收震动特性的研究以及I.Kernytskyy等提出的在矩形空间中安装3个不同冲击质量的DVA的设计方案也存在此类问题。F.Djemal等提出将存储一些小球体的钢外壳附接到初级振动结构的设计思路,由于小球堆叠摆放,随着荷载的增加,“筒壁效应”就越显著,削弱其减震效果。
考虑到带宽和减震有效性,研究提出了一种由多个减震球组成的碰撞耗能减震器,其特点是用挡板将减震球一一隔开,实现多个单球耗能减震器的并联。与现有单球耗能减震器相比,研究提出的减震器相当于是多个单球减震器的叠加,减震性能有效提升。并且由于碰撞间隙可调,其减震频带更广,在工程中的实用性更高。与现有多球耗能减震器相比,研究提出的减震器进一步改进了其结构设计,避免了多球堆叠导致的性能下降,实现了一球一框的合理布置,同时也减少了实际施工成本。
1 多球碰撞耗能减震器原理
1.1 减震器工作原理
研究提出的间隙可调网格式多球碰撞型减震器工作原理如图1所示。由图1可知,减震器主要由底座、活动板、减震球和间隙调节机构组成。底座固定于减震对象上,其上安装多个左挡板,多个右挡板则固定在活动板上,减震球放置在左右挡板构成的空间中。活动板可以通过间隙调节机构在移动副上左右移动(其中移动副安装于底座上),以调整减震球的工作间隙,并适应不同振幅振动对象的减震要求。间隙调整机构由步进电机、螺旋传动机构和连杆机构组成,步进电机的转动通过螺旋机构和连杆机构驱动活动板左右移动,以调整减震球的工作间隙。连杆机构工作时杆和杆处于近似共线位置,这样减震器作用在活动板上的碰撞力主要通过杆和杆传递到支座上,因而,与之垂直的步进电机上所受到的碰撞力很小或不受碰撞力作用,可以起到保护电机的作用。减震器的工作方向与活动板移动方向呈45°夹角,这样通过活动板一维方向的调节运动就可以实现减震球两个方向的间隙调整。

图1 多球碰撞型耗能减震器
1.2 力学模型及正常工作条件
为了研究减震器的力学性能,提出计算简图如图2所示。为了简化问题,提出以下假设:①忽略减震球与底面的摩擦力;②忽略减震球的体积,将其视为质点;③减震球与左、右挡板之间的碰撞为完全非弹性碰撞,即恢复系数e
=0,碰撞时间极短,碰撞前后位置不变;④底座及建筑物质量远大于减震器质量。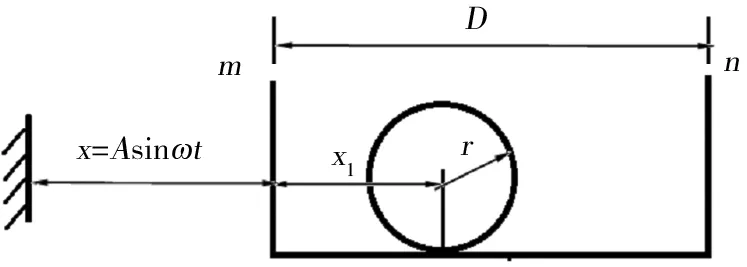
图2 力学模型
设减震球半径为r
;减震球与左右挡板之间的总间隙Δ
=D
-2r
,D
为左右挡板之间的距离;球心相对于左挡板的位置坐标为x
。当底座作简谐振动时,底座的位置坐标x
=A
sinωt
,底座的速度v
=Aω
cosωt
。减震球的位置:
x
=x
+x
=A
sinωt
+x
,(1)
减震球的速度:

(2)
碰撞条件:
x
=r
或x
=D
-r
。(3)


图3 底座简谐运动位移与速度变化规律
综上所述,减震器正常工作条件为:

(4)
通过上述分析可知,由于研究讨论的多球碰撞型减震器间隙可调,在正常工作条件下,减震器对减震对象的振动频率和振幅具有很强的适应性。
2 减震性能分析
2.1 算法流程
为了定量分析减震器的力学性能,在减震器底座作简谐运动的条件下采用数值方法对减震器的运动进行仿真分析,其算法流程图如图4所示。
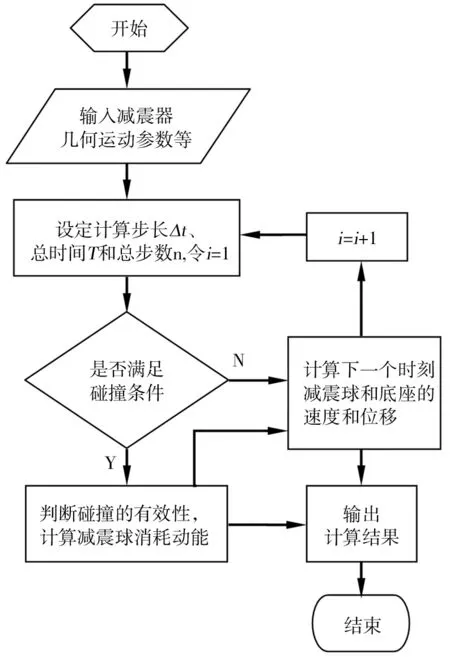
图4 算法流程图
(1)输入减震器运动参数,如底座振动频率ω
和振幅A
等,以及减震球初始运动条件,如减震器工作间隙Δ
,减震球的初位移和初速度,材料恢复系数等。(2)设定计算总时间T
和步长Δt
,从而计算出计算总次数n
。并令i
=1,开始循环计算求解。(3)计算底座和减震器的位移和速度,根据碰撞条件式(3)判断减震器是否发生碰撞,若未发生碰撞,计算减震器和底座下一时刻的位置,并令i
=i
+1,进入下一步。若满足碰撞条件,根据碰撞前底座和减震器的速度大小和方向,以及材料恢复系数,计算下一个时刻底座和减震器的速度,判断碰撞的有效性。若碰撞前底座与减震球速度方向相反,则为有效碰撞,反之,为无效碰撞。计算减震球消耗的动能并令i
=i
+1,进入下一步。(4)结束循环,输出计算结果。
2.2 计算结果与分析

y
=55sin(20πt
)+60cos(40πt
),也表现出同样的碰撞特性。由此说明研究提出的多球碰撞型减震器对减震对象的不同运动特性也有良好的适应性。
图5 底座简谐运动时减震球运动规律

图6 底座复杂运动时减震球运动规律
(2)底座振动振幅和频率与减震球运动和耗能的关系。在底座简谐运动频率相同的条件下(f
=10 Hz),底座简谐振动振幅A
与减震器每次碰撞消耗动能Q
之间关系曲线如图7所示。由图7可见,随着底座运动振幅A
增加,减震器消耗的动能也随之增多,这是由于底座运动振幅增加,最大运动速度上升,导致碰撞加剧,耗能增加。
图7 底座运动振幅A与减震器耗能关系 图8 底座运动频率ω与减震器耗能关系
底座简谐运动振幅相同的条件下(A
=55mm),底座简谐运动频率ω
与减震器每次碰撞消耗动能Q
之间关系曲线如图8所示。由图8可见,随着底座简谐运动频率ω
的增大,减震球每次碰撞消耗动能非线性增加。这是由于底座简谐运动的最大速度与底座运动频率ω
之间呈线性关系,底座运动频率增加,底座运动的最大速度急剧上升,导致减震球每次碰撞耗能增加。同时也说明研究提出的减震器工作频带较宽。(3)初始条件对减震球运动规律的影响。减震球具有不同初位移x
时减震球的位移和速度变化规律如图9所示。由图9可见,在初位移x
正常取值范围内,经过1~2次碰撞以后,减震球的位移和速度运动规律相同。同样地,减震球初速度v
对减震球位移和速度响应的影响也有类似的规律如图10所示。故减震球的初位移和初速度对减震器的力学性能影响不大。
图9 不同初位移x0时减震球的位移和速度响应

图10 不同初位移x0时减震球的位移和速度响应
(4)恢复系数e
对减震球运动规律的影响。减震器具有不同恢复系数e
时减震球在0.5 s内的总耗能变化曲线如图11所示。由图11可见,减震球消耗能量与恢复系数e
之间的关系较为复杂,当恢复系数e
在[0,0.15]范围内,减震球消耗的总能量和有效碰撞耗能随着e
的增大而略有减小,无效耗能为0(有效耗能是指减震球碰撞能使得框架速度减少的碰撞耗能,反之则称为无效耗能)。当恢复系数在[0.15,1]范围内,减震球总耗能、有效耗能和无效耗能都随着恢复系数的增加而增加。这是由于随着恢复系数增加,减震球碰撞时反弹速度增加,有效碰撞次数和无效碰撞次数均增加,相应的耗能也增加。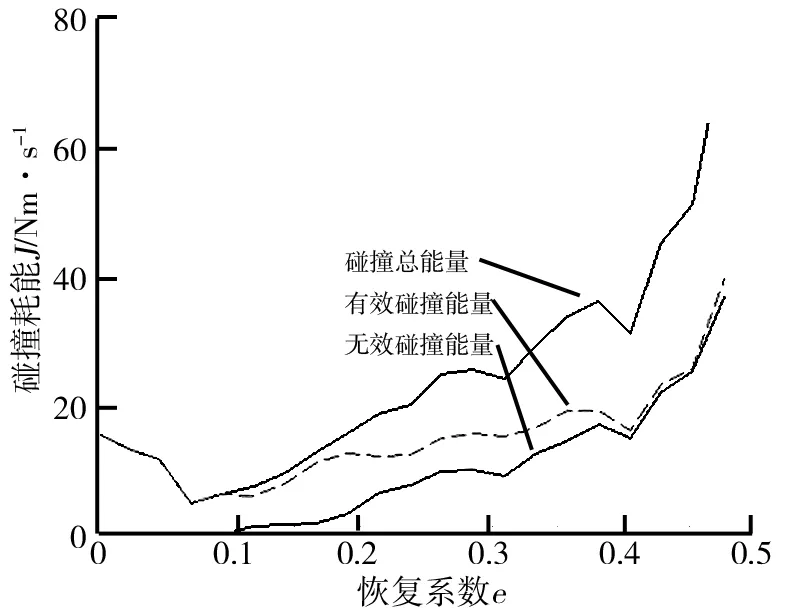
图11 不同恢复系数e时减震球在0.5 s内的总耗能
3 结论
研究提出了一种间隙可调节式多球碰撞型耗能减震器,该减震器对减震对象振动频率和振幅动态适用性强,且其运动特性分析计算方便易行。减震球初始位置和初始速度对减震球后续碰撞运动无影响,即多个减震球可同步工作。材料恢复系数e
对减震器性能影响很大,恢复系数e
越大,减震耗能效果越好。研究提出的多球碰撞型耗能减震器,性能预测方便,减震效果好,对减震对象的运动特征适应性强,具有较好的应用推广前景。