一种基于神经网络的空空导弹传感器在线故障诊断技术研究
2021-07-30花文华张金鹏
李 伟,花文华,张金鹏,2
(1 中国空空导弹研究院,河南洛阳 471009;2 航空制导武器航空科技重点实验室,河南洛阳 471009)
0 引言
导弹的飞行控制系统主要用以完成制导导引、稳定控制等功能,需要由惯性传感器敏感当前导弹的飞行状态参数。但是惯性传感器在导弹贮存期间,随着时间推移会发生参数漂移,在飞行过程中也可能发生性能故障或异常。这些故障或异常将导致惯性传感器敏感到的导弹飞行参数与实际存在较大偏差,飞行控制系统由此产生的执行器控制量也会偏离真实情况,导致任务失败。因此惯性传感器能否将当前导弹飞行状态准确传递给飞行控制系统将对导弹可靠性产生重大影响。
为提高导弹的可靠性,有必要设计一种故障诊断器对惯性传感器进行在线故障诊断,并对故障信号进行重构。目前,故障诊断方法主要有基于解析模型的方法、基于信号处理的方法和基于知识的方法,具体到传感器故障诊断器及状态观测器的建立方法主要有滤波器[1]、小波分析[2]、专家系统[3]、滑模控制[4]等。文中提出了一种基于神经网络[5]的在线系统状态观测器,能够准确高效的对导弹惯性传感器敏感信号进行跟踪、诊断并实现信号准确估计。
1 故障诊断器设计
文中搭建的故障诊断器结构示意图如图1所示。
图1 故障诊断器结构示意图
首先基于导弹气动模型建立导弹状态观测器,在线估计导弹的飞行状态参数。其次搭建BP神经网络,通过学习训练导弹的实际飞行数据建立输入输出映射,通过该映射可在线估计导弹传感器的预期输出,将该预期估计值与传感器的实际输出值进行比较,并进行相应的逻辑判断,即可得到导弹传感器的故障诊断结果。若判断传感器故障,则可将BP神经网络输出的预期估计值代替传感器实际输出,传递至导弹的飞控系统中,用于执行制导、稳定等功能。
导弹飞行速度表示为:
(1)
式中:m为导弹质量;P为发送机推力;X为气动阻力;G为重力。
在BP神经网络故障诊断器设计中,考虑到导弹气动特性,加速度传感器的输出值与导弹姿态、飞行速度、发动机推力与导弹所处海拔高度有关,因此设置9个BP神经网络输入层节点,分别为导弹姿态(四元数R0,R1,R2,R3)、导弹飞行速度(VX,VY,VZ)、发动机推力(P)与导弹海拔高度(H)。BP神经网络隐含层设置为1层,隐含层节点数依照Kolmogorov经验公式设置为17个。输出层节点数设置为3个,分别为X,Y,Z三通道加速度传感器输出值。
在BP神经网络故障诊断器设计完成后,利用实际的弹道数据对故障诊断器进行训练。采用典型弹道数据进行训练,网络的初始权值取[-1,1]之间的随机值,网络学习速率设置为0.9,训练误差设置为0.001,训练次数为100次。在训练过程中节点权值经过大量训练而逐渐稳定,训练的迭代次数也不断减少,直至训练成功。在神经网络训练成功后,保存已训练好的网络各节点权值,故障诊断器即搭建成功,可进入后续工作阶段。
2 仿真试验
在故障诊断器搭建后,将设计好的故障诊断器嵌入导弹飞行控制软件中,通过模拟惯性传感器故障的数字仿真试验来验证其有效性。惯性传感器故障一般有恒输出、恒偏差和恒增益等故障模式,其数学描述为:
1)恒输出:
yo=C
(2)
2)恒偏差:
yo=yi+C
(3)
3)恒增益:
yo=k·yi
(4)
式中:C为常数;yi为原始输入;k为增益系数。采用Matlab搭建数字仿真平台,利用蒙特卡洛统计试验法进行仿真试验。仿真试验的弹道设计条件为:导航坐标系采用惯性系,导弹发射时海拔高度为3 km,初速为X向和Y向0 m/s,Z向260 m/s,目标海拔高度为4 km,速度为X向Y向0 m/s,Z向100 m/s,弹目相对距离X向为6 km,Y向为1 km,Z向为44 km。在数字仿真环境中模拟惯性传感器故障,在给定的弹道曲线下,仿真计算导弹姿态、速度、位置,仿真结果如图2所示。
图2 Z向加速度计故障输出
如图2所示,均在Z向加速度计进行故障注入,时间均在发射后20~30 s,具体的注入形式及仿真结果如表1所示。
表1 故障形式及仿真结果
注入故障后的X,Y,Z方向的弹目相对距离如图3所示。
图3 故障注入后仿真结果
试验结果显示导弹脱靶量过大,未能命中目标,Z向加速度计的这几种故障模式对空空导弹造成的结果是不可逆的,仅凭原来的制导回路无法克服,会导致导弹任务不能完成。将文中设计的故障诊断器接入导弹制导回路中,重新按照故障条件进行仿真试验,结果如图4、图5所示。
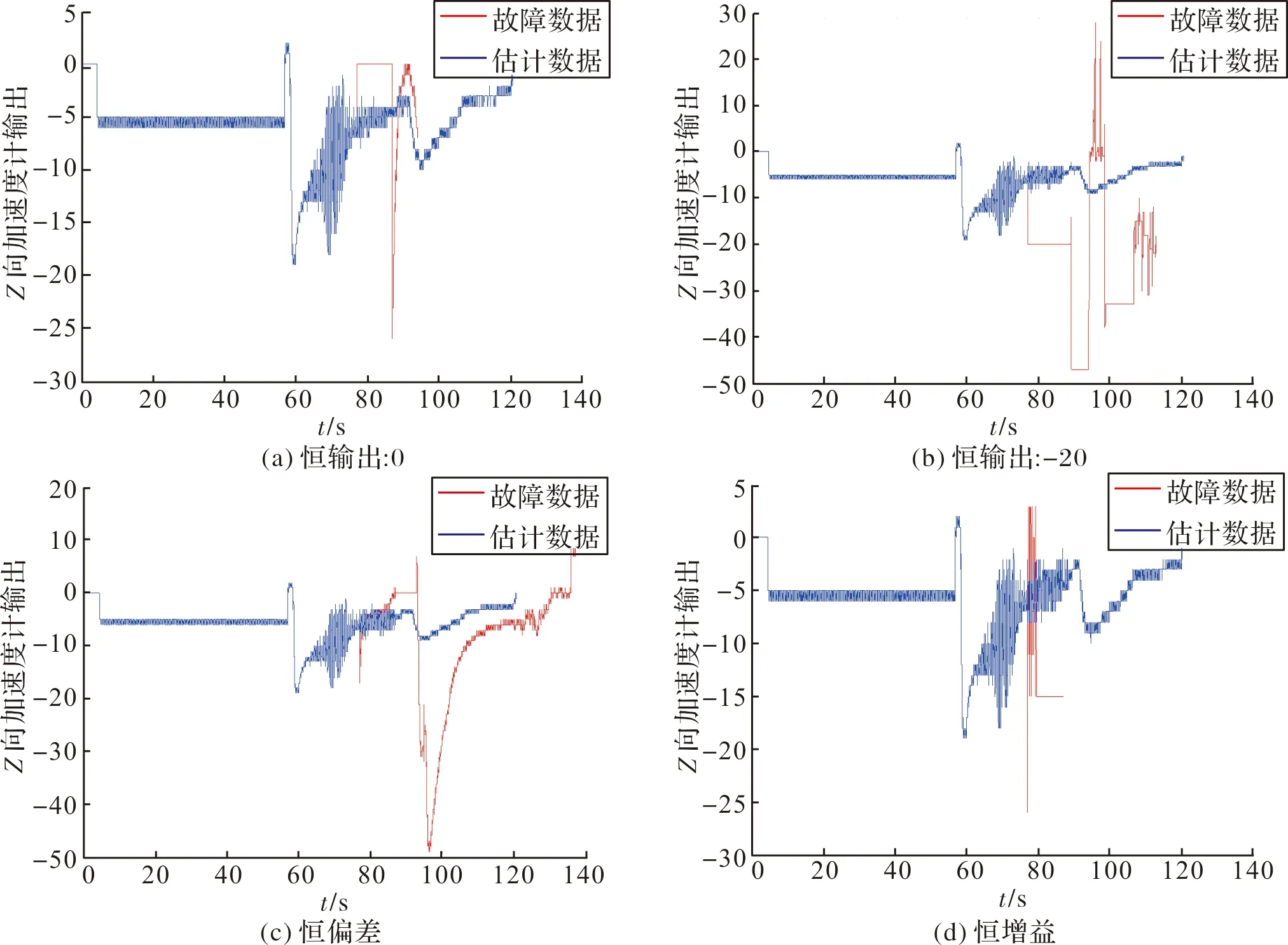
图4 Z向加速度计故障数据和估计数据

图5 接入故障诊断器后仿真结果
如图5所示,所设计的故障诊断器准确判断出Z向加速度计故障发生,并对Z向加速度计的输出进行了准确的估计,用于导弹的导航制导。导弹在使用故障诊断器估计的Z向加速度计输出后,仍能命中目标,完成飞行任务。
3 结论及展望
提出的基于神经网络的导弹传感器在线故障诊断技术方案有效。为了探索故障诊断技术,设计的故障诊断器目前仅针对加速度传感器通道,下一步将进一步对角速度传感器通道等进行故障诊断设计。并且,目前故障诊断器训练数据仅为空空导弹的一般弹道,后续工作将考虑针对一些极限工作条件设计单独的故障诊断分支以满足空空导弹的全工况适应性。
