基于X运动系统四轴水下作业平台的设计与制作*
2021-07-30马静囡程惠能赵颖娟杜海梅王子豪
马静囡,程惠能,赵颖娟,杜海梅,王子豪,彭 捷,关 超
(1 空军工程大学基础部, 西安 710000; 2 空军工程大学航空工程学院, 西安 710000)
0 引 言
随着近几年电子技术、人工智能技术、计算机技术的发展,智能水下机器人得到了越来越多的关注。水下机器人作为人类探索水下世界的工具,具有机动性好、安全性高、操纵性强等优点,世界各国都高度重视并持续开发水下机器人技术,在深海探测、海洋资源开发等方面都发挥了积极的作用。在民用方面,水下机器人还可完成深井施工、水下打捞、管道清淤等工作。在军事方面,水下机器人还可执行水下潜伏、水下监测、水下侦察等多项活动。可见,不论是民用还是军用,水下作业平台的发展都是不可或缺的一项技术[1-5]。
文中的水下作业平台运用了已经成熟的四旋翼无人机动力布局和PID自动控制进行设计,有着较高的机动性和灵活性,并且在密闭舱中还有较大空间可供完成不同功能时的进一步开发及应用。
1 整体系统设计
1.1 结构设计
该平台整体构型以四旋翼无人机为模板,把四旋翼在空中的飞行方式应用至水下,三维结构如图1所示。
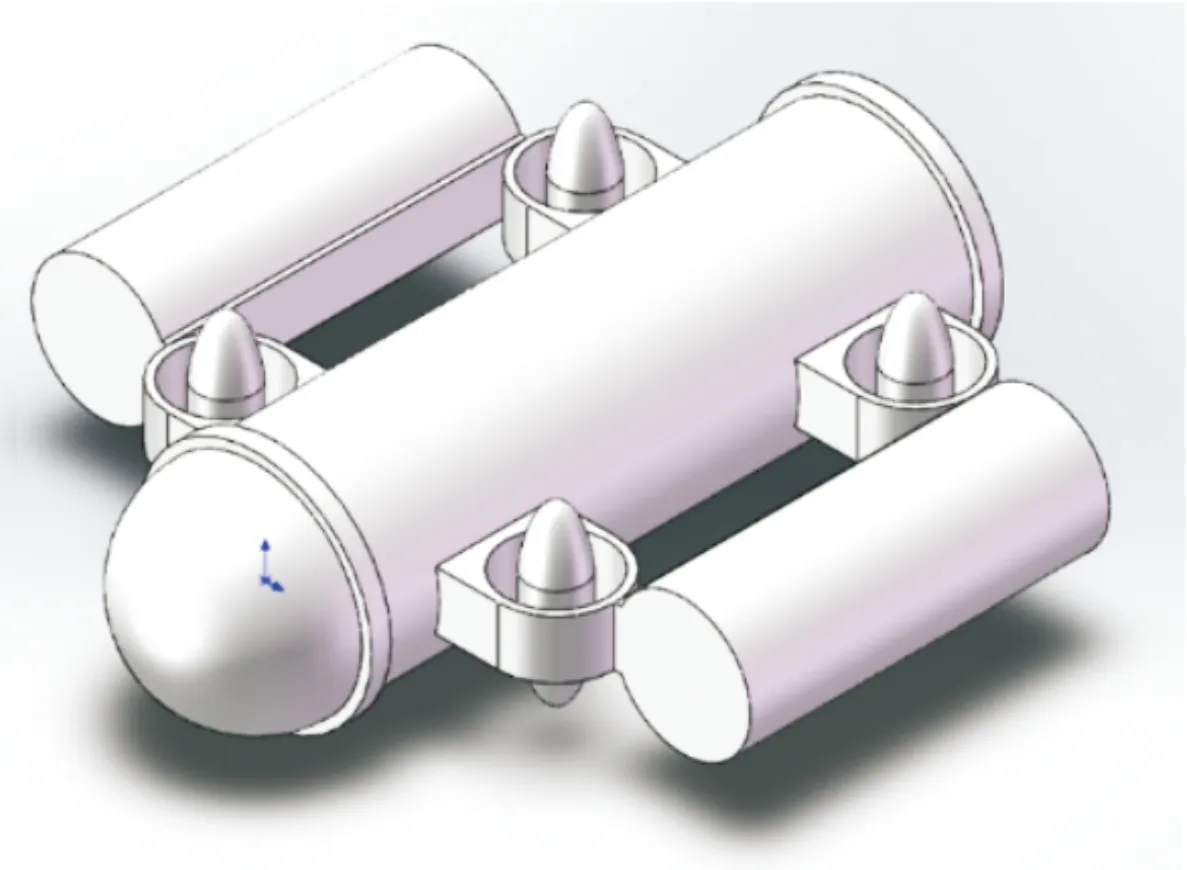
图1 水下作业平台三维结构图
该水下机器人将四旋翼中的4个电机均匀分布在主水密舱中性层,运用理论力学知识对电机正反浆所产生的偏航力矩进行判断并设置电机位置,圆柱体的主水密舱能减小机器人航行时的阻力,两侧的副水密舱用于减小机器人自身的偏航力矩。
在主水密舱内部,各电机的电调在舱壁上固定,配重位于水密舱的正下方,目的是将水下机器人的重心下降至中性层以下,即使在高速航行过程中受到紊流扰动亦不至于侧翻。水下机器人的控制器位于水密舱上部正中央,通信天线作为水下机器人和接收器的通信枢纽,立于水下机器人后部,用以完成与遥控器无线通信。航行过程中,机器人的尾部比头部稍高,留下一部分盈余的电缆在水面上。
1.2 模块设计
该机器人在模块方面主要包含电机模块、主控制器模块、通信模块等。
电机模块采用KV值较小的电机,电机转速增加从而排水速度增加使得总推力增大,克服平台自身重力从而上浮。配有两对电机,转向利用前后两排电机转速不同,产生速度差,使主体产生倾角,从而产生水平方向的分力,使其前进后退。转弯时,利用同样的原理,左右电机转速不同产生转向力。该运动方式能大大提高机器人在水下的灵活性。
主控制器模块采用的是STM32处理器,具有高性能、低成本、低功耗的特点,利用其作为水下机器人的控制器,可方便实现控制器与其他功能模块或者传感器的连接及控制。在机器人平衡方面,可借鉴四旋翼无人机的原理对各电调进行调试。
通信模块的功能主要是进行水下机器人与控制台的通信。该机器人通信模块采用的是CC2500,因水下电磁波信号的急剧衰弱,不能做到有效的无线通信。故在机器人设计中,将通信模块用电缆漂浮在水面,使其能够及时与控制台进行交互。
在主水密舱内部有大量的盈余空间可供接下来继续开发,正前方可以配置摄像头,通过电缆将水下画面实时传输回水面。位于水下机器人正下方的配重可换为机械臂、传感器等实现海底采样。甚至可以用高爆炸药和雷管代替配重遂行作战任务。
2 控制系统设计
2.1 外部控制环节
考虑到操纵简易程度、机器人灵活性、节省用于数据传输的电缆等方面,采用了航模遥控器进行遥控,在遥控范围内能准确将指令传送至机器人。操作员判断机器人姿态并预判下一步动作,发出的指令通过高频电波发出,接收模块在水面上接收指令后通过导线传输至机器人控制器,进而控制电机转速调整机器人姿态。其外部控制示意图如图2所示。
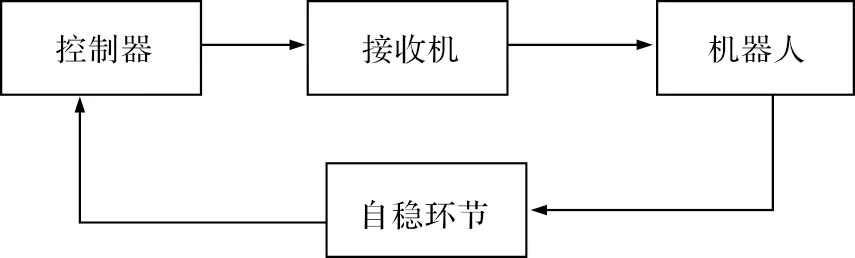
图2 机器人外部控制示意图
在机器人下水之前可通过串口输出PWM波进行最后调试。根据平常操作经验,将4个电机转速分别进行调整,减轻自稳环节的负担,从而保证机器人下水后能正常工作。
2.2 自稳环节
自动控制系统中,主要采用ARM芯片,此芯片为32 bit处理器,运算速度快,能快速修正水流扰动给机器人带来的偏航、滚动等问题。
在机器人控制主板外接MPU6050模块,该模块能检测到机器人在水下航行的姿态,再由程序进行PID反馈自动控制,可以很好地对抗水下紊流对机器人的干扰。PID控制对系统性能的影响可由其传递函数表示为:
(1)
式中:K=ωn/(2ζ),称为开环增益。若令z=1/Td,则闭环传递函数为:
(2)

在航行或悬停过程中,若水流对机器人产生影响,机器人可自动感知被扰动后的姿态并从控制板将指令传输至各电机并调节转速使自身维持给定的姿态。通过增大开环增益或者通过增加积分环节以提高系统型别,即可很好减弱甚至消除扰动对系统输出的影响。其示意图如图3所示。
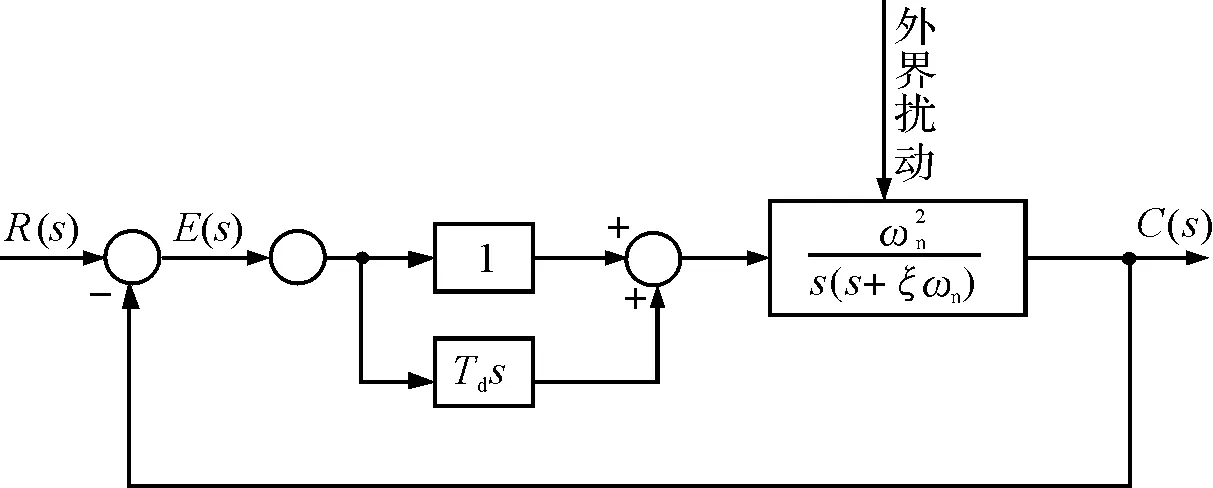
图3 PID自稳控制示意图
本环节主要缺点在于传感器受电磁影响较大,误差会在航行和悬停时不断累积,长时间工作会出现错误。因此,为了保证机器人能正常工作,在每次下水之前必须将陀螺仪传感器校准一遍。在今后的改进中,将着重对用于自稳调节的传感器进行升级换代,选择受电磁影响较小的元器件进行代替。
3 通信系统设计
水下无线通信问题一直困扰着水下潜航器的发展,针对此问题进行了多次试验,最终决定采用信号接收板外置水面以上进行无线通信,具体设计如下:
原本的信号接收器接收线较短,不能满足此水下作业平台深度需要,因此更改了信号传输端口,采用银线将接收器外置漂浮物上,并对信号接收器和信号传输线都进行了一定的防水密封处理,采用此种信号接收方式,信号传输稳定、效率高、设计独特、操作简单,满足水下作业平台的设计需要。
4 材料选取及制作
水下机器人主体部分采用厚度为5 mm圆柱形亚克力板材料,能承受水压对机器人带来的影响。主体前部采用半球形,主水密舱采用圆柱体结构。主体两侧分别安置4个水下电机,采用向下排水从而产生向上的推力,4个电机转动所产生的偏航扭矩可以相互平衡,机器人主体合扭矩为零,达到航向不变且上浮的效果。尾部采用平面结尾。
电机外壳采用3D打印,每个电机能够产生约20 N推力,能使机器人在水下以较高的速度行进。主体内部放置电调、锂电池、控制主板以及导线。各环节紧密连接,主体透明能观察到内部构造。主水密舱内部还配有适量的配重块,可以根据不同情况选择在不同的位置配以适当的重量。
电机、电调均经过防水处理,保证在水下能正常工作。即使下潜深度过大或水密舱撞击而破裂导致主水密舱进水,机器人也能正常工作。在机器人两舷分别配置副水密舱,之所以配置这两个舱体,是因为电机与主水密舱距离太近,浮力集中于机器人主体部分,难以让机器人处于稳定状态,需要将浮力分散。副水密舱设置还从机器人配重方面进行考虑,机器人配重较多,浮力不足,通过设置这两个舱体既可以提升机器人的浮力,也可以降低因配重不均给机器人带来的滚动力矩。
机器人总体长32 cm,宽20 cm,主水密舱内径11.5 cm。电池配有专用的锂电池充电器。其实物如图4所示。
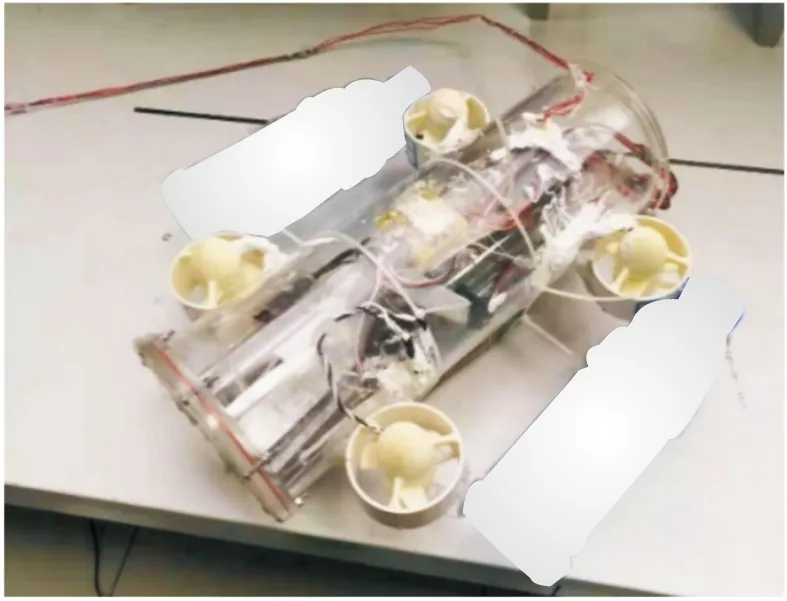
图4 水下机器人实物图
5 测试数据
机器人测试参数包括基本参数以及运动参数。
5.1 基本参数
该水下机器人基本参数如表1所示。
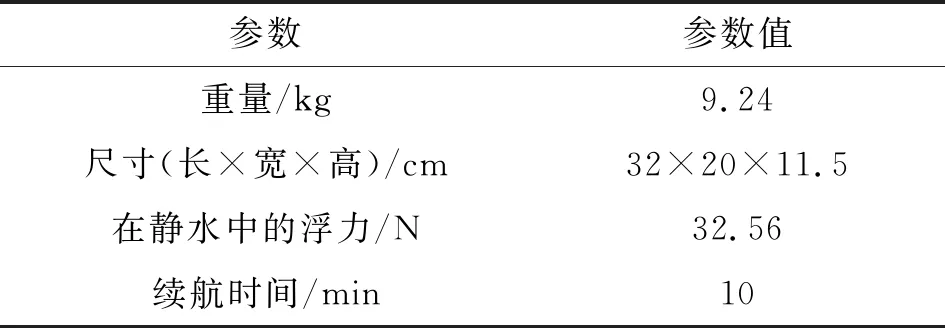
表1 基本参数
5.2 机器人运动参数
该水下机器人运动参数如表2所示。

表2 运动参数
6 结 语
随着技术的发展,水下四旋翼机器人技术会逐步走向成熟与实用。任务规划、飞行控制、无GPS导航、视觉和通信等子系统的进一步健全和完善,使其具有自主浮沉和全天候抗干扰稳定潜航能力,未来的四旋翼机器人还可能实现多介质飞行即能实现水下潜航和水上飞行。
除基本能力外,水下机器人还需要继续扩展一些其他功能,例如水下攻击、水下干扰、水下监听等军事用途,为信息化作战提供保障。
