分布式协同航弹圆弧路径规划及非线性制导律设计
2021-07-30米长伟纪辞禹夏云凡
米长伟,吴 旭,纪辞禹,夏云凡
(兵器工业集团航空弹药研究院,哈尔滨 150036)
0 引言
协同攻击武器是基于“集群”作战思想,以空间分布的低成本单一功能载荷集中建立功能优势。协同攻击的集群作战形式是未来空战的一个关键领域,国内外学者对其进行研究,并取得了一些研究成果[1-3]。
BTT导弹可用于分布式协同作战,且BTT控制技术具有高机动性、高气动稳定性等众多优点,其自动驾驶仪基于极坐标操纵体制,在实现对目标的跟踪过程中,能快速操纵弹体旋转,将导弹的主升力面对准目标航路点,最大限度利用主升力面所能提供的法向过载,提高导弹的机动能力[4]。
针对BTT控制技术,国内外学者在航迹跟踪和制导律优化方面均取得了一些研究成果。崔生旺,黄叙磊等针对BTT导弹引入无人机的大圆航线飞行技术,设计了非线性制导律,但并未涉及滚转通道抖动问题的处理[4-5]。冒云慧等针对无人机航迹跟踪问题,提出了具备抗风能力的横向非线性制导算法,该算法需要确定合适的距离参数,在实际应用中受到一定限制[6]。贾鹤鸣等实现了UUV的航迹跟踪控制,设计了非线性迭代滑模跟踪控制器,并结合Lyapunov稳定性理论,分析了控制器的稳定性[7]。Manyam,Mejias,黄得刚等针对无人机无动力进场阶段的制导进行了研究,并进行了仿真分析和试验验证[8-10]。
在分布式协同BTT航弹的研制过程中,航向机动时受协调支路影响,滚转会产生抖动。因此,在分析相关研究成果的基础上,提出了适用于集群协同BTT航弹的双椭圆航路越界及过点判断策略、圆弧路径规划和与之适应的非线性制导律优化算法,并利用Lyapunov稳定性理论分析了该算法的稳定性。
1 航弹航路规划及制导律设计
航弹任务航路由若干航路点构成,简化的直线航路规划如图1所示。

图1 直线航路规划几何示意图
在制导控制中,由航迹建立发射坐标系下的XRP2ZR平面内,P0P1为规划的直线航路;因存在导航和控制偏差,实际飞行航迹为P0P′1,且P′1点在发射系中满足z1=0的条件。
首先,得到非滚转弹体坐标系下的法向过载和侧向过载,其表达式为:

(1)
(2)
式中:ny指向y轴方向;nz指向z轴方向;Ky,Kvy为法向过载系数;Kz,Kvz为侧向过载系数;ϑ为俯仰角。
然后,通过这两个过载求得体系下的过载指令:
(3)
(4)
γctrl=0
(5)
式中:ny_bdy为俯仰通道制导指令;nz_bdy为偏航通道制导指令;γctrl为滚转通道指令。
直线航路规划时,式(2)可简化为:
nz=Kzz+Kvzvz
(6)
2 分布式协同BTT航弹圆弧路径规划及非线性制导律优化
在集群协同BTT航弹间,为解决航弹防碰撞问题,需要严格设计安全航路。针对这一问题,拟从两个方面入手:第一,设计协同航弹的双椭圆安全区域;第二,单枚航弹的航迹跟踪。
建立以目标点为原点O的目标发射坐标系,OX轴在目标点水平面内由发射点指向目标点方向,OY轴沿目标点的铅垂线向上。
2.1 协同航弹间双椭圆航路安全边界
如图2所示,根据3个航路点及安全边界参数b,构建安全边界椭圆Ellip1和Ellip2,椭圆相交区域为阴影区域Dz。

图2 双椭圆安全边界几何示意图
由航路点P1,P2和P3的位置坐标,可计算出航路点P1,P2之间的距离dp1。同时计算得到安全边界解算阈值Lthd为:
(7)
椭圆Ellip1和Ellip2分别以航路点P1,P2和P2,P3为焦点。根据椭圆焦点特性,可通过点到航路点的距离之和与Lthd的大小,判断点与椭圆的位置关系。
结合航路点P1,P2在笛卡尔坐标系下对应坐标值,可计算得到航弹距离航路点P1和P2的距离之和d1,与到点P2和P3的距离之和d2,进而确定安全边界越界标志Flag。当且仅当Flag为2时,判定航弹越过安全边界。定义Sgn为取变量正负号,则有
Flag=Sgn(Lthd-d1)+Sgn(Lthd-d2)
(8)
Flag融合安全边界越界判据和航路点过点判据于一体,即Flag为0时,可以作为航路点的过点判据。
2.2 圆弧航迹规划
如图3所示,圆心O点坐标为(x0,y0,z0),则有

图3 圆弧路径规划几何示意图
(x1-x0)2+(z1-z0)2=R2
(9)
(x2-x0)2+(z2-z0)2=R2
(10)
根据目标发射坐标系的特性,目标点的坐标为(0,0,0),有
(11)
式(9)和式(10)展开,并整理得到:
(12)
(13)

(14)
(15)
进而可得:
(16)
(17)
同时,根据(xc,yc,zc)的方程:
(xc-x0)2+(zc-z0)2=R2
(18)
可得:
(19)
进一步,对式(18)求导,可得
(20)
(21)
2.3 制导律设计优化
圆弧路径规划得到的圆弧航路点在发射系XRP2ZR平面内,其中ZR轴方向的实际位置分量为zc。集合航路为凸面体与XRP2ZR相交形成的图形,并且zc-z0仅选择正值,进而可得
(22)
同时,由圆弧路径规划特性约束可知,圆弧所对应的弦PP2为非直径,因此可剔除式(21)的奇异点,且vc的解算恒有解。
进而,可得修正侧向过载指令为:
nz=Kz(z-zc)+Kvz(vz-vc)
(23)
2.4 非线性优化制导律的稳定性证明

(24)
结合式(23)可得:
(25)

(26)

引理1:设A,E,F均为n阶实方阵,C∈Rm×n,且
1)A=EF;
2)FT+F=-CTC;
3)E>0;
4)(A,C)能观。
证明:由Lyapunov定理,结合条件4)可知,存在对称正定矩阵P满足下述Lyapunov方程:
ATP+PA=-CTC
(27)
根据条件3),令P=E-1,并结合条件2)、 3),可得:
ATP+PA=FT+F=-CTC
(28)

定理1:二阶阻尼式(25)系统方程渐进稳定的充分条件为:
M>0,DT+D>0,K>0
(29)
对于式(26)系统方程,有
(30)
由式(29)与式(30)可知E>0,且存在n阶可逆矩阵T,满足
DT+D=TTT
(31)
可令C=[T0],则
FT+F=-CTC
(32)
进而,引理中的条件1)至条件3)均成立,针对条件4),令
(33)
由于矩阵T可逆,则
(34)
再由M-1K可逆,得
(35)

3 数学及半实物仿真
半实物仿真系统主要由仿真控制系统、弹载计算机、转台运动模拟系统等组成。其中,发动机采用数学模型,舵机采用实物,导航系统姿态数据由转台模拟,航弹飞行数据、航迹数据由数学模型得到。
主要系统参数为:IMU选择MEMS IMU,陀螺零偏为10°/h,加速度计零偏为1 mg,AHRS传感器精度约为0.5°,0.5°,2°,组合导航测速精度0.1 m/s,定位精度为水平10 m,高程15 m。
半实物仿真中设计的航路为:爬升-定高巡航-降落回收,其中定高巡航时先直线飞行,然后做半圆弧转弯,再转直线飞行。
如图4所示为飞行过程中姿态角的变化曲线,可以直观的看出偏航角完成180°变化。

图4 飞行过程中姿态角曲线
如图5~图7所示,为建立的地面发射系的X,Y,Z方向的位置曲线。在转弯时,完成航迹参考点的切换时,重建了发射系,因此在X方向上产生了跳变。

图5 转弯过程地面发射系的X向位置

图6 转弯过程地面发射系的Y向位置
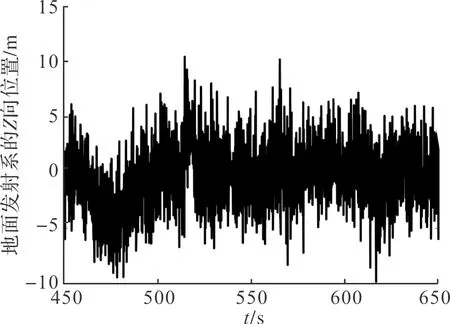
图7 转弯过程地面发射系的Z向位置
图8~图10为转弯时姿态角的对比曲线,可以看出传统制导律方法在俯仰、偏航和滚转3个方向均产生了抖震,其中滚转方向幅值最大,这种现象对飞行过程的能耗和平稳性均有不利。而文中提出的非线性制导律改进方法,有效抑制了抖震带来的震荡。其中,航向角实现了平滑,滚转角抖震幅值降低到2°左右,比改进前降低了一个数量级。

图8 转弯过程俯仰角对比曲线
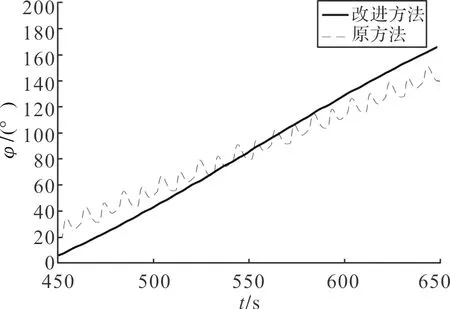
图9 转弯过程偏航角对比曲线

图10 转弯过程滚转角对比曲线
4 结论
通过对航弹航路优化及制导律进行分析,针对航路设计及追踪问题进行了双椭圆航路越界和过点判据的设计,实现了对航路点的遍历以及航路寻迹约束。针对试验中由偏航机动导致的滚转通道抖动问题,设计了圆弧路径规划及制导律优化算法,有效抑制了通道抖动,保证机动时姿态较为平稳。最后通过仿真试验,证明了提出的方法有效,能够为集群协同航弹研制工作提供技术支撑。
