废墟狭小空间多旋翼生命搜索无人机需求分析和关键技术探讨
2021-07-28朱笑然张云昌张涛张雪华于敬泽
朱笑然 张云昌 张涛 张雪华 于敬泽
0 前言
习近平总书记指出,要强化应急管理装备技术支撑,优化整合各类科技资源,推进应急管理科技自主创新,依靠科技提高应急管理的科学化、专业化、智能化、精细化水平。要加大先进适用装备的配备力度,加强关键技术研发,提高突发事件响应和处置能力。
随着无人机领域的不断发展,微型无人机技术也越来越成熟,不仅在军事领域得到了广泛应用,在其他领域的应用也越来越多,比如在灾害监测、航空测绘等领域。微型无人机是基于微机电系统技术,涉及空气动力学、材料学、结构学等多个领域集成的复杂系统。
针对新时期我国地震、地质、洪水、泥石流、构筑物坍塌、极端气候等灾害应急救援的迫切需求和国家地震灾害紧急救援队多年的现场实际救援经验,围绕应急救援装备智能化、模块化、轻型化的发展趋势,结合当前微型无人机的应用现状以及未来的发展,对废墟狭小空间多旋翼生命搜索微型无人机的需求和发展趋势分析,并对其关键技术进行探讨。
1 废墟狭小空间多旋翼生命搜索无人机的行业需求和发展趋势
灾害发生后往往会造成大量人员被掩埋在建筑废墟内,根据“黄金72小时”黄金救援期,在这段时间内,被困人员的存活几率最高。越早被发现,越有利于开展营救,就越有可能给他们带来存活的机会。因此,被困人员的生命搜索是救援现场的首要任务。搜索效率直接关系到救援工作成功与否,是提高被困人员存活率的重要因素。但是,地震、洪水、构筑物坍塌等灾害发生后,极端恶劣的救援环境,如频发的余震、狭小的缝隙、危险的建筑废墟、有毒有害气体、漏电、核辐射环境等,这些都给救援工作带来了极大的困难和挑战,极大地影响救援效率,同时也威胁着救援人员的生命安全。
首先是救援时间的紧迫性。为了提高幸存者的存活几率,救援队员必须实现快速响应与最有效的救援方式,这就要求救援队员要在最短时间内完成大面积废墟的生命搜索并准确定位幸存者。这给救援队员的心理和生理都带来了极大的考验,很多队员都有着24小时,甚至72小时连续工作经历,过度疲劳、压力大等都会导致搜救工作效率的下降。
其次是废墟环境的危险性。震后废墟是一个极不稳定的破坏形态,随时会有余震发生,具有多次倒塌的危险,对救援队员的生命安全造成威胁。破坏性地震可能会造成化工厂、核电站等特殊建筑的破坏,“3·11”日本地震引发的巨大海啸对日本东北部造成毁灭性破坏,并引发福岛第一核电站核泄漏,大量泄漏的核污染威胁着救援队员的健康与安全,敲响了全世界范围应急救援工作的警钟。
最后是狭小的救援空间。由于幸存者被掩埋在错综复杂的倒塌建筑下,救援队员很难通过狭小的倒塌缝隙搜索并定位幸存者,而且为了不对废墟造成二次破坏,要放弃重型装备,通过小型破拆工具打开救援生命通道。小型破拆工具在效率上要比重型装备低,耗费时间长,这给救援工作带来一定的困难[1]。
2020年6月13日,沈海高速浙江台州温岭出口处,一辆载有25.36吨液化石油气,由宁波开往温州的槽罐车发生爆炸,爆炸波及范围半径约400至500米,爆炸产生的强大冲击力造成一栋民房局部和两处厂房倒塌,600余间房屋和多辆汽车受损,20人死亡,24人重伤,172人住院。爆炸使周边建筑倒塌,部分建筑严重受损但未倒塌,有幸存者被困其中,救援队员采用人工搜索和仪器搜索的方法,如图1,但其废墟结构的安全性未知,随时都有发生二次倒塌的危险,对幸存者和救援队员的生命安全造成一定威胁。
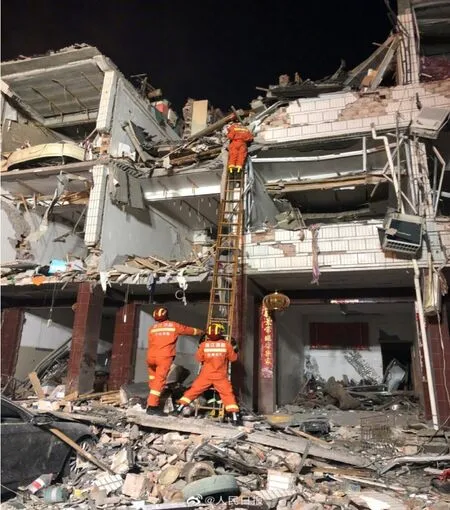
图1 救援队员采用人工搜索的办法搜寻幸存者
综上所述,应急救援是一项时间紧迫、危险度高、异常复杂的工作。因此,在灾害发生后,可使用一种代替救援队员进入到废墟狭小空间中的多旋翼微型无人机,通过自主避障、自主导航等智能飞行技术,对被困人员进行搜索和定位。无人机体积小,可以穿过救援队员不能通过的狭小缝隙;机动灵活性强,可以对废墟内部环境进行立体化搜索;能够连续工作,可以减轻救援队员的压力。
微型无人机这一概念是由美国资深科学家奥根斯坦在1992年美国兰德公司和国防高级研究计划局举办的一次关于未来军事技术的研讨会上提出来的,它是指尺寸只有手掌大小的飞行器[2]。微型无人机具有体积小、隐蔽性强、便携性好等特点,使得其被各个领域广泛研究。美国是对微型无人机领域进行研究最早的国家,取得了重大成果,并将其在阿富汗战争中试用。我国也对微型无人机展开了系统的研究,航天科技集团公司北京空气动力研究所研制的微型无人机目前已经进入了自主飞行样机研制试验阶段。2019年10月,大疆公司研发出了一款和手掌尺寸差不多的航拍小飞机,机身重量249g、飞行时间30min,飞行速度1~13 m/s。
当前微型无人机的技术越来越成熟,应用的领域也越来越广泛,已经为应急救援等特种行业小型化和智能化等需求奠定了相关的软硬件基础。根据大量的灾害资料,通常的木和砖托梁结构的建筑物一般有五种形式的倒塌模式:层叠倒塌(馅饼式倒塌)、有支撑的倾斜倒塌、无支撑的倾斜倒塌、“V”形倒塌和“A”型倒塌。这些倒塌由于楼板、承重墙和家具等塌落在一起产生了叠加效果,一般会形成一些狭小的空间,就是这些狭小空间,可以为微型无人机提供穿越倒塌废墟的通路,从而进入到废墟内部搜寻幸存者。
2 废墟狭小空间多旋翼生命搜索无人机关键技术
目前,无人机领域中根据微型无人机的飞行特点及总体结构布局将其划分为固定翼微型无人机、扑翼微型无人机和旋翼微型无人机三类,而旋翼微型无人机因其可以悬停、垂直起降,具有能够在狭小的工作环境中运行的优势被使用得最多。按照多旋翼无人机结构及具备的功能,其发展可以分为3个阶段,即被动飞行阶段、半自主飞行阶段及自主飞行阶段[3]。自主飞行阶段是指无人机可实现低空高精度悬停、自主定位导航、自主避障、自主路径规划及多传感器融合与信息处理功能,该阶段也是废墟狭小空间多旋翼生命搜索微型无人机的理想状态。
由于废墟狭小空间环境条件的复杂性和不稳定性,多旋翼生命搜索无人机的发展主要取决于自主定位导航技术、自主避障技术、多传感器信息融合、模型重建与数据分析等技术的发展与成熟。
2.1 自主定位导航技术
自主定位导航技术由实时定位、地图构建和路径规划与控制等技术构成。该技术可以实现无人机在废墟环境中无需人工控制而自行智能飞行,并完成生命搜索任务。
相较于一般的室外野外高空环境,多旋翼微型无人机在废墟狭小空间中搜寻被困者时需要实时定位、规划飞行路线并躲避复杂的障碍物,这对无人机的精准定位和导航避障能力要求非常高。目前在无人机上应用较为广泛的导航避障方法是即时定位与地图构建(SLAM)技术,其中一类方法是基于激光雷达、毫米波雷达等高精度传感器建立精确地图,并在此基础上完成无人机的路径规划并实现导航。这种方法虽然精度高且较为可靠,但依赖于传感器,废墟内结构环境复杂,钢筋等金属材料以及黑暗潮湿的环境,不可避免会对传感器造成一定干扰。另一类方法是基于单目和双目相机的视觉SLAM,该方法通过对相机采集的图像进行匹配,分析无人机的飞行姿态并重建周围环境[4]。单目和双目相机体积较小,可以安装在微型无人机上,但是这类方法受相机图像质量因素的影响,性能较差的机载相机无法提供准确的信息。除了上述两类基于SLAM技术的方法,还有一类方法直接利用深度视觉信息,通过搜寻废墟中距离较远的区域进行避障。由于不需要建立地图,所以该方法的复杂度低、实时性好,但是需要使用体积较大的深度传感器,而且只能进行局部避障,无法进行精准导航。
针对微型无人机载荷较低和续航时间短的特性,选择激光雷达、毫米波雷达等高精度传感器与单目双目摄像机作为传感设备,以激光测距飞行作为搜寻被困者过程中的主要路径规划方法引导微型无人机对废墟中的各个角落进行搜索。同时利用云端深度恢复的方式还原单目双目视觉图像中的深度信息,并采用基于深度图像的导航方法,在恢复的图像中寻找可以飞行的路径,从而优化搜索路线,如图2。相对于传统的导航方式,该方法兼具传感器占用体积小、可靠性高的特点,适合在微型无人机上使用。
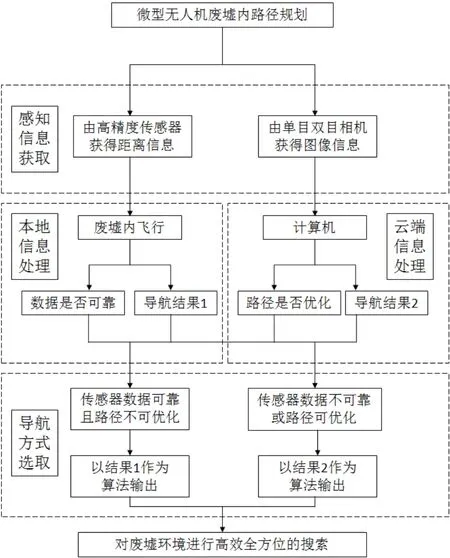
图2 微型无人机废墟内总体路径规划流程图
2.2 自主避障技术
微型无人机在废墟狭小空间内飞行时对环境中的障碍物要具备自主识别、预判警告和主动避开等功能,要实现这些功能,主要有两个方面需要得到解决,一方面是无人机自主避障系统对废墟环境中障碍物的感知和识别,也就是通过避障系统的传感器获取障碍物的相关信息;另一方面是无人机自主避障系统能够对传感器获取的废墟环境中障碍物的相关数据做处理,实现对障碍物的有效预警和主动避开。
目前,国内外用于感知环境中障碍物的传感器可以分为主动式传感器和被动式传感器两个大类。主动式传感器是利用成熟的激光雷达、毫米波雷达等技术对无人机周围的障碍物进行感知,无人机依据主动式传感器感知障碍物信息,比如障碍物的位置、尺寸等。被动式传感器是采用单目双目等光学传感器,通过拍摄获取障碍物清晰的图像轮廓[5]。激光雷达、毫米波雷达等主动式传感器具有体积小、重量轻、测距远的优点,但是在测量障碍物方位角度时精准度低。单目双目视觉传感器可以测量障碍物所处的方位角度,具有计算量小的优势,但是在测量距离时精度低。
可采用主动式传感器与被动式传感器相结合的方式,如图3。利用毫米波雷达等探测距离远的优势,实现对远距离障碍物的预警判断,提升了飞行的安全性;在近距离靠近障碍物时,融合单目双目视觉传感器拍摄获取的障碍物图像与毫米波雷达、激光雷达高精度传感器感知的障碍物距离、方位、角度等信息,实现了两种传感器的优势互补,可以完成有效的自主避障飞行。这种方式具有体积小、功耗低、计算量小的优势,适合应用在微型无人机领域。
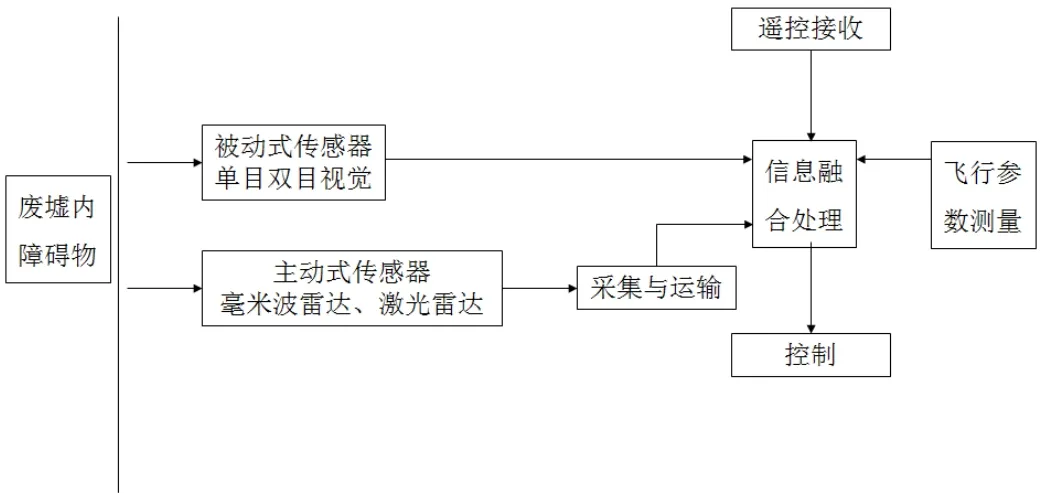
图3 无人机自主避障系统
2.3 模型重建与数据分析
在废墟内部飞行的微型无人机可搭载光学相机、红外相机等相机载荷获取飞行路径下的物体信息,通过二维影像拼接技术和三维影像建模技术,将获取到的废墟内部环境,通过遥控器传输到PC终端的3D软件,最终形成二维图像和三维模型,方便救援人员对废墟内部结构进行分析,有利于搜索被困者并制定最有效的救援方案。
废墟内二维影像实时拼接技术目前来看存在主要问题有以下几个方面:一是无人机飞行高度低,获得影像幅宽小。由于废墟内部空间有限,无人机飞行相对地物高度在厘米级,而搭载相机焦距和像元尺寸具有一定限制,因此获得的单张影像地面范围和影像分辨率有限,这将影响影像重叠度的要求。二是废墟内部光线弱及变化大。废墟内部光线较弱,利用光学载荷获取的影像亮度较低,地物纹理不清晰,进而导致特征点提取较少难以完成影像匹配与拼接;同时在部分废墟情况下光线条件变化大,图像拼接后匀色难以完成。
目前三维建模技术是通过在无人机下方搭载不同角度的相机完成地物正上方和侧方数据的信息采集,结合相机参数、飞行平台导航定位定向系统、姿态等信息,辅助开展三维建模。由于三维模型计算量较大,要求算力较高,目前最新技术实现了稀疏点云的快速搭建,配备色彩信息可以大致看出地物形态。
进行废墟内部二维影像拼接和三维影像建模,首先要解决的就是数据获取问题。由于废墟环境的特殊性,需要获取机身四周全方位的影像数据,故需要发展集成度更高的相机载荷,通过相机间相对位置信息确定影像相对位置,辅助开展特征点匹配,并且还需要解决在距离地物较近的情况下达到重叠度要求;其次是废墟内部光线问题。解决数据采集范围问题后,需要解决的就是数据质量问题,重难点是需要解决废墟内部光线问题,曝光不足将极大地降低模型效果,因此需要综合感知、载荷和速度自动控制等,构建综合光线调节系统;最后是时效性。时效性可以随算力的提升和算法的优化而进一步提高。算法优化目前来看存在一定的难度,但是算力增加则可通过云服务器等方式极大提升。
3 结语
结合国内外应急救援装备的研究发展趋势,提出一种可以进入到废墟狭小空间中,集自主定位导航、自主避障、多传感器信息融合等方面为一体的智能飞行技术,携带红外、热成像、音视频等生命搜索模块的多旋翼微型无人机的设想,可以更好地对被困人员进行生命搜索和定位。虽然目前还没有这种应急救援装备,但是我们有理由相信,随着无人机技术的不断发展,传感器以及人工智能技术的不断成熟,在不久的将来,我们可以实现无人机智能废墟搜索,这将会全面提升我国应急救援能力,对提高灾害救援技术水平具有重大意义。