法布里-珀罗干涉仪构成的湿度传感器*
2021-07-16叶文豪刘继兵
叶文豪,江 超,王 解,刘继兵
(湖北师范大学物理与电子科学学院,湖北 黄石435002)
在许多应用领域,湿度的监测十分重要,如生物医药,食品加工,化工生产等[1-2]。与传统的湿度传感器相比较,光纤湿度传感器具有体积小,抗腐蚀,灵敏度高,响应速度快等优点[3-4]。光纤湿度传感器大部分是由光纤结构及对湿度敏感的材料组合而成。基于此,人们设计出多种不同结构的光纤湿度传感器,如光纤布拉格光栅(FBG)湿度传感器[5-6]、长周期光纤光栅(LPFG)湿度传感器[7-8]、马赫-泽德尔干涉仪(MZI)湿度传感器等[9-12]。但是,这些光纤湿度传感器有的灵敏度低,有的易受光源强度变化的影响,有的存在较大温度串扰。因此,设计一款高灵敏度,稳定性好,响应快速的光纤湿度传感器具有很大的意义。
光纤法布里-珀罗干涉仪(FPI)是光纤干涉仪的一种类型,其有着稳定性好,体积小,容易制造等特点,被广泛应用于传感领域[13-15]。近几年来,人们利用镀膜方法制备了一些光纤FPI湿度传感器,获得较好的效果[16-22]。这些湿度传感器有的利用单模光纤端面镀膜,有的利用空心光纤端面镀膜,有的利用光子晶体光纤端面镀膜,有的利用多模光纤端面镀膜等。这些结构制作相对容易,但会产生温度串扰。Polymicro Technologies公司生产的毛细石英管性能稳定,对温度不敏感,机械强度较高,利用它制作F-P腔传感器性能优良有广泛的应用[22-27]。本文基于FPI,设计了一款湿度传感器,该传感器是将单模光纤与毛细石英管拼接,然后在毛细石英管末端镀上聚乙烯醇(PVA)薄膜,构成一款FPI湿度传感器。详细论述了传感器制作方法,定性分析了湿度测量原理,实验研究了湿度与温度传感特性。
1 传感器结构与原理分析
1.1 传感器的制作与反射谱
传感器结构示意图与光路图如图1所示,设计的F-P腔由单模光纤和毛细石英管以及毛细管末端的PVA膜构成。
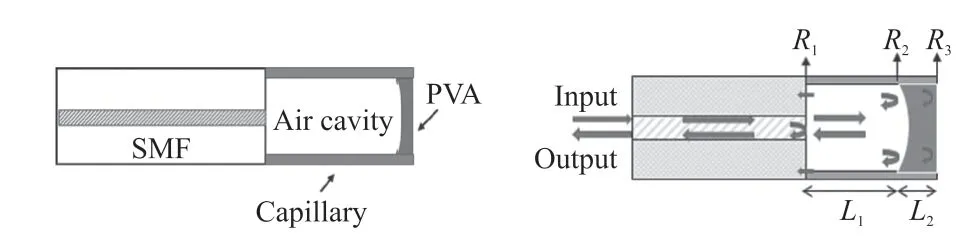
图1 传感器结构示意图与光路图
为了选择合适的毛细管参数与确定传感器中毛细管的长度。利用光学仿真软件进行仿真,得到光从单模光纤纤芯前向传播的空间功率分布图如图2所示。从图中可以发现,光从单模光纤纤芯向前传播200μm时,光束主体还是束缚在直径大约为42.5μm的圆柱空间中。因此如果选用内径较小毛细管时,部分光束可能会传输到毛细管管壁中,增加了原理分析与实验分析的复杂性。选用内径大于42.5μm的毛细石英管时,能够确保光都在毛细石英管的空气腔中传输,分析起来比较简单。因此在传感器中选择Polymicro Technologies公司生产的TSP075150型号毛细石英管,它的内径为75μm,外径为150μm,管壁为高纯度石英玻璃。

图2 光从单模光纤纤芯向前传播的光功率分布图
传感器制作选择的单模光纤为武汉长飞光纤光缆有限公司生产的普通标准单模光纤,纤芯直径为9μm,包层直径为125μm;选用的毛细石英管型号为TSP075150,内径为75μm,外径为150μm。毛细石英管150μm外径包含了表面涂覆层直径,表面涂覆层直径为24μm,熔接时剥去毛细石英管的涂覆层后,毛细石英管的外径为126μm,与普通单模光纤外径125μm基本一致,可以利用光纤熔接机进行两者的熔接。虽然单模光纤与毛细石英管外径基本一致,但由于单模光纤是与空心的毛细石英管熔接,熔接它们必须采用专门的熔接参数与熔接方式。利用日本藤仓公司生产的型号为Fujikura FSM-100+大芯径熔接机对光纤与毛细管进行熔接。以下为传感头制备步骤:
第一步,准备好端面切割平整的单模光纤以及毛细管。由于毛细管表面涂覆了一层聚酰亚胺聚合物,无法利用剥线钳剥离,因此采用燃烧法将毛细管表面涂覆层去除,用无水酒精擦拭干净后,再使用光纤切割刀将其端面切平整。
第二步,单模光纤与毛细石英管的熔接。熔接机自带熔接模式的熔接参数不适合于毛细管与单模光纤之间的熔接,所以必须将熔接参数进行手动调节,熔接参数如表1所示。调节完成后,将单模光纤与切好的毛细管熔接在一起。前面利用仿真软件模拟了光从单模光纤纤芯向前传播的分布图(图2),因此实验中选择毛细石英管长度范围为150μm~200μm。当毛细管长度取170μm左右时,能够确保光都在内径为75μm毛细石英管的管腔中传输,光束不会传播到毛细管管壁中。最后,利用光纤切割刀把毛细石英管切割到168μm长度。

表1 光纤与毛细石英管熔接参数[25]
第三步,利用提拉法制作PVA薄膜。首先配置PVA溶液,将PVA颗粒与去离子水混合后形成5%(wt/wt)的混合液体,然后将其放到磁力搅拌器上,在温度为90℃,转速640 rpm的条件下,水浴加热1 h,使PVA颗粒充分溶解,形成PVA溶液。将准备好的熔接结构的毛细管端放入PVA溶液中,毛细管吸入PVA溶液,然后利用步进电机从PVA溶液中提拉出传感头,通过控制步进电机速度来控制PVA薄膜厚度。将镀膜后的结构放入真空干燥箱中,在80℃温度下烘干1 h。然后将结构放在金相显微镜下观察,看膜是否均匀,膜形状与厚度是否符合要求。如果不符合要求,需要重新进行多次镀膜。
第四步,将把制作的结构分别与宽带光源和光谱分析仪连接在一起,经过反复观察结构的反射谱,调节结构参数,以获得理想的反射谱,最终完成传感器结构的制作。
图3 是制作好的传感器的反射谱。对图3进行分析,发现反射谱存在许多谐振峰,这些小的谐振峰又形成一个比较大的包络线,说明该干涉仪其实是两个F-P干涉仪共同作用的结果。可以看出不同光拍内的自由光谱范围(FSR)并不完全一致,经讨论发现FSR与腔长成反比,在后面湿度与温度测量中选择光拍中波谷变化较大的区域1 450 nm~1 600 nm进行观测。图4是图3光谱图经傅里叶变换后得到的空间频谱图,观察空间频谱图可知,仅有3个主要频率对干涉形成较大贡献。
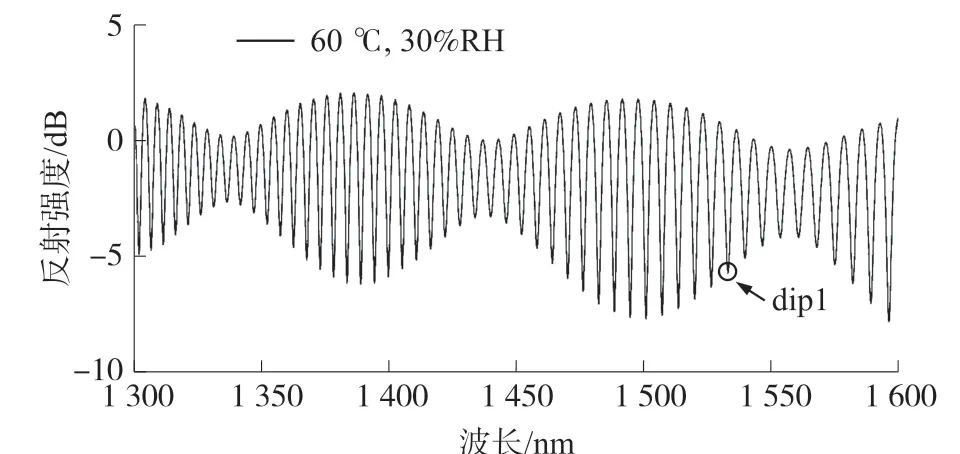
图3 传感器的反射光谱

图4 传感器的空间频谱
将制作完成的传感器结构放在金相显微镜下拍摄,实物图如图5所示,发现PVA膜基本在毛细管内部,测得PVA膜凹面厚约为18μm,毛细石英管中的空腔长度约为150μm,传感头毛细管总长约为168μm。在用提拉法制备PVA膜时,PVA液体流入毛细管内部,经过干燥形成薄膜,由于毛细管管径较大,薄膜内表面形成一个曲率较小的反射曲面。
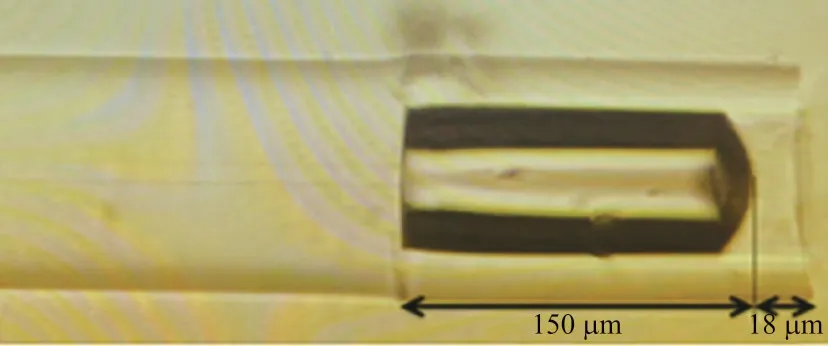
图5 传感头在显微镜下的实物图
1.2 传感原理分析
传感器的光路示意图如图1所示,该法布里珀罗干涉仪由三个反射面构成,单模光纤的末端截面R1,毛细石英管与PVA膜的接触面R2以及PVA膜与外界空气接触面R3。其中R1、R2、R3为三个面的反射率。该传感器结构相当于两个F-P腔的级联,使用提拉法制备PVA膜时,PVA液体流入毛细管内部,经过干燥形成薄膜,薄膜内表面形成一个反射率为R2的反射曲面。但弯曲程度较小,由于光线主要集中在镜面中间部分反射,可以把它近似看着是平面镜反射,这一近似方法在其他文献中也被使用到[28-29]。光源发出的光被这三个镜面反射,三束不同光路的光因为不同相位延迟而产生干涉。所以输出的干涉光强度可以表示为[30]:

式中:R1,R2,R3分别为三个反射镜面的反射率,A=;其中k1为空气谐振腔的传输损耗,k2为PVA谐振腔的传输损耗。光在空气腔和PVA膜传输的相移可以分别表示为:

n P VA为PVA膜的折射率,nair为空气腔中空气介质的折射率,L1、L2分别为空气腔与PVA膜的长度,λ为光波长。当满足相位条件时,传感器将会形成稳定的干涉谱。利用式(1)仿真了干涉仪腔长与反射率对干涉谱的影响。图6(a)为不同L1对干涉谱的影响,参数设置为:k1=k2=0.11,L2=5μm,R1=0.18,R2=R3=0.25,L1分别取50μm、100μm和140μm,可以看出随着L1的增大,干涉谱的自由光谱范围FSR越来越小。图6(b)为不同L2对干涉谱影响,参数设置为:k1=k2=0.11,L1=140μm,R1=0.18,R2=R3=0.25,L2分别取5μm、10μm和15μm,观察到L2对干涉谱的包络有影响。图6(c)为不同的反射率R2对干涉谱影响,参数设置为:k1=k2=0.11,L1=140μm,L2=5μm,R2分别取0.05、0.15和0.25。可以看到,反射率越大,包络线的波峰强度越大,但包络线波谷强度越小。
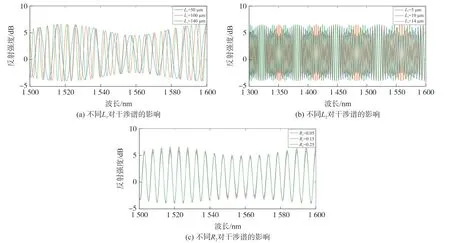
图6 模拟仿真的传感器的反射光谱
实验测得的光谱图与模拟的光谱图基本一致。PVA液态时折射率较小,成膜变成固态时折射率变大。PVA膜是一种吸水性很强的薄膜,当它周围环境湿度发生变化时,它会吸收水分而膨胀,而且折射率会变小。最终造成F-P干涉仪腔长与反射率R2与R3发生变化,从而造成干涉谱中波谷波长发生变化。如果通过实验能够测出它们之间确定变化关系曲线,就可以利用干涉谱中波谷中心波长随外界湿度的变化关系解调出环境湿度。
2 实验结果与分析
2.1 湿度实验
湿度实验装置连接如图7所示,宽带光源采用型号为FL-ASE-EB-D-2-2-FC/APC的自发辐射光源,发出的光波长范围1 250 nm~1 650 nm;光谱分析仪型号为AQ6370D,测量范围600 nm~1 700 nm,精度±0.1 nm。光从宽带光源(BBS)输出,经环形器传输至传感器,然后反射光再由环形器传输到光谱仪(OSA)。传感器放在可程式恒温恒湿试验箱里,所测相对湿度范围为30%RH~80%RH,测量时温度保持为60℃不变。
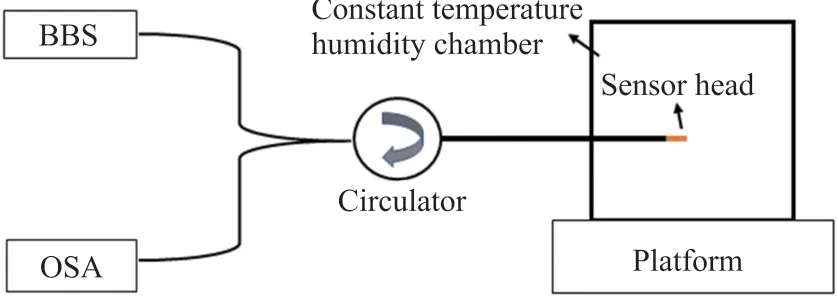
图7 湿度测量的实验装置示意图
在实验中,湿度从30%RH开始记录数据,湿度每上升5%RH记录一次传感器的反射谱。为了得到相对稳定的数据,每达到一个湿度等光谱稳定5 min后再记录数据。在湿度增加时,光谱仪记录的反射光谱如图8所示。为了使光在光纤中传输损耗最小,选择波谷的中心波长处在光纤通信波段(1 550 nm)附近也就是C波段来分析实验结果,这样光传输的损耗最小。因此,选择波谷中心波长λ1=1 533 nm、峰值强度A1=7 dB的波谷dip 1为实验观测点(图3中的dip 1)。可以看出随着湿度的不断增加,dip 1的中心波长明显向右漂移;dip 1的峰值强度先变大然后变小,有一定规律可循,但在80%RH时强度只有2 dB,会影响到湿度的进一步测量。图9记录了湿度从80%RH降到30%RH,每降低5%RH记录一次传感器的反射谱。从图中可以明显看到,随着湿度的降低,dip 1的中心波长明显向左漂移;dip 1的峰值强度时大时小,没有什么规律可循。因此,在这里只能选择波长解调法来测量湿度,无法获得峰值强度随湿度的变化关系,但峰值强度的大小决定了湿度的测量范围。

图8 湿度增加时传感器的反射谱
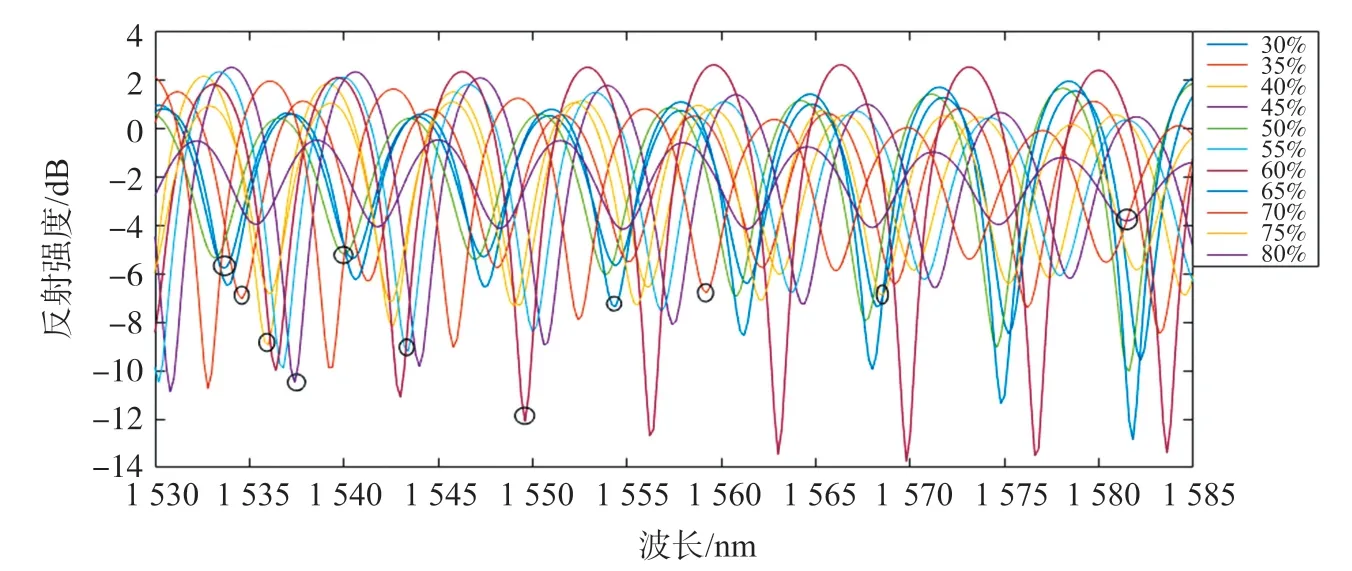
图9 湿度降低时传感器的反射谱
通过考察dip 1的中心波长与湿度的变化关系,利用波长解调法来测量湿度。图10为传感器反射谱中dip 1的中心波长随环境湿度变化关系及拟合曲线。从图10可以发现,dip 1的中心波长随环境湿度增加而指数增加,随环境湿度降低而指数减小,它们之间的指数拟合方程如下:

式中:λ1表示dip 1的中心波长,RH表示环境相对湿度,式(3)为加湿时的拟合曲线,式(4)为除湿时的拟合曲线,两条曲线的拟合程度R2分别为0.998 8和0.997 1,拟合程度相当高,两条拟合曲线变化趋势一致,能够满足测量需求。实验结果说明,传感器在加湿和除湿测量过程中,两条曲线基本重合,但还是存在较小测量误差,上升与下降的重复性较好,利用式(3)与式(4)通过波长偏移解调出环境湿度。
依据实验结果,从图10可知,当传感器湿度在30%RH~80%RH变化时,实现波长总漂移量达46.4 nm,说明该传感器灵敏度较高。由于传感器的湿度升降拟合曲线为指数函数形式,因此可用曲线某一点的切线斜率来表示该点灵敏度的具体数值。实验中,当相对湿度达到80%RH时dip 1的峰值强度只有2 dB,如果进一步增加相对湿度,依据峰值强度变化趋势,峰值强度将会更小,影响到湿度的进一步测量。因此设计的湿度传感器的量程为:30%RH~80%RH,传感器的分辨率最小达到0.1%RH。
为了进一步验证传感器的响应速度与重复性,进行了下面的实验。首先把传感器从湿度为35%RH状态放到湿度为70%RH状态,记录响应时间,以及达到稳定的时间;然后再把传感器从湿度为70%RH状态放到湿度为35%RH状态,记录响应时间及达到稳态时间。重复这个过程4次,获得图11所示的响应曲线。从曲线可以得到响应平均上升时间约为14.46 s,响应平均下降时间约为18.49 s,响应时间为多次实验结果求取的平均值,可计算出响应上升时间误差在2.6 s以内,下降响应时间误差在2 s以内。稳态保持时间相对较长。重复4次实验获得的响应特性曲线是一致的。说明制作的传感器工作时响应速度很快,重复性较好。快速响应归因于相对较薄的PVA薄膜。
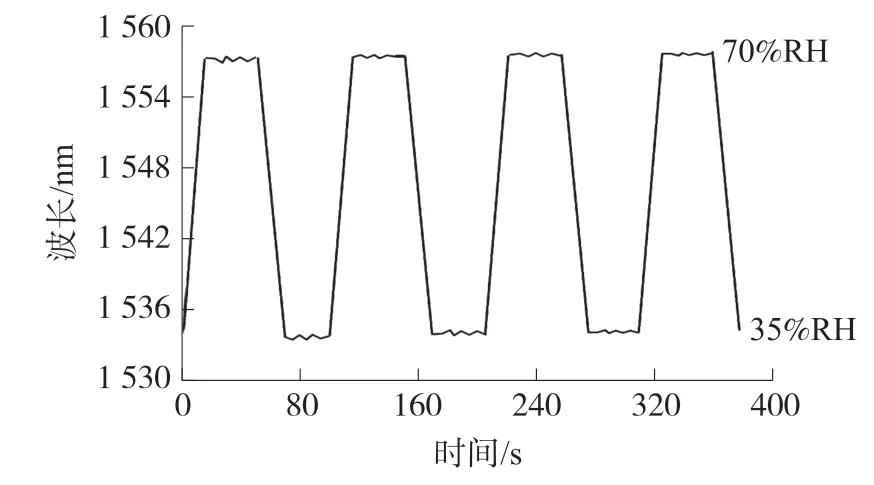
图11 湿度从35%RH到70%RH变化时传感器的响应曲线
2.2 温度实验
对于光纤湿度传感器,温度串扰是必须要考虑的问题。毛细石英管性能很稳定,它的弹光效应和热光效应均较小,因此毛细石英管对温度变化不太敏感[27]。下面进行简单分析:
R1与R2构成的F-P腔为空气腔,光束主要在空气中传输,腔壁为毛细管,则温度灵敏度可表示为[30]:

λN表示N阶谐振波长表示谐振腔中毛细管的热膨胀系数,为表示腔内空气介质的热光系数,为-5.6×10-7/℃。设波谷的中心波长λN=1 546.4 nm,计算F-P空气腔的温度灵敏度约为0.015 46 pm/℃,很小几乎可以忽略不计,说明空气腔对温度不敏感。

图12 为温度实验装置图。温度实验采用管式炉进行,炉管中央部分温度场很稳定。温度实验在环境湿度(43%RH)下进行,将传感器放入管式炉炉管中央,温度从45℃开始加热到80℃结束,每隔5℃记录一次传感器的反射光谱。温度实验选择传感器反射谱中处于光通信波段的dip 2为观测点,它的中心波长λ2=1 546.4 nm,传感器光谱变化情况如图13所示。可以看到45℃~65℃阶段,dip 2的中心波长有较明显的向左漂移;在65℃以后,波谷的中心波长基本不再漂移。图14记录了波谷dip 2的中心波长λ2随温度T的变化数据。
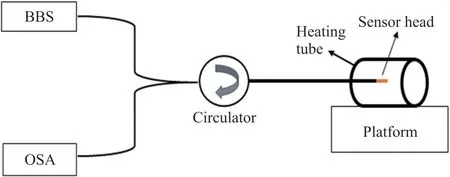
图12 温度实验装置示意图
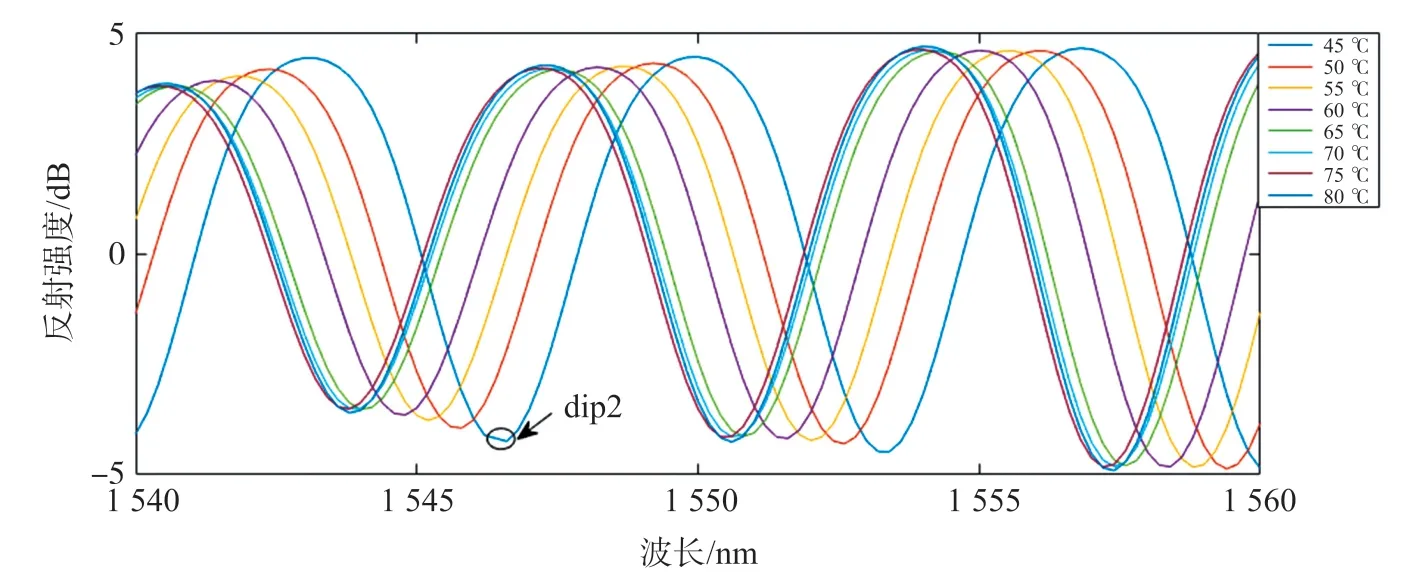
图13 传感器反射谱随温度变化曲线
对图14数据进行分析发现,不能完全用线性函数或指数函数拟合dip 2的中心波长与温度的变化关系,没有确定的变化关系,因此无法用它测量温度,但可以分析温度对湿度测量的影响。在图14中,对温度45℃至65℃数据进行拟合,得到中心波长λ2与温度T之间的拟合方程为:
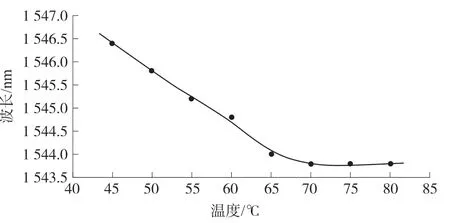
图14 波谷dip 2的中心波长随温度变化情况

线性拟合度为0.986 2,得到温度灵敏度为-107.4 pm/℃,实验测得的温度灵敏度与前面理论计算的比较接近。从图14可以看出,温度45℃~65℃变化造成的波长漂移不到2 nm,而湿度变化引起的波长漂移达到46.4 nm,说明在温度小于65℃时传感器存在一定的温度依赖性,但影响较小;当温度大于65℃以后,传感器反射谱dip 2基本不再漂移,说明传感器对温度不再敏感,温度变化不再影响传感器的湿度测量结果。因此在65℃以后,湿度传感器不用再考虑温度串扰问题。因此我们设计的湿度传感器比较适合于高温条件下工作。为了验证传感器的一致性,我们同时制备了几个参数相一致的器件,分别进行了以上的湿度与温度实验。由于每个器件的参数(特别是薄膜厚度)不能完全保证一致,造成传感器的反射谱有一定的差异,但实验发现它们对环境相对湿度与温度的响应趋势与拟合关系是完全相似的,说明传感器的一致性较好,能够在工程上应用。
3 结论
本文提出并实验验证了一种基于F-P干涉仪的高灵敏度湿度传感器。传感头是利用毛细管与单模光纤拼接,然后在毛细管端面涂镀上一层PVA膜而构成,制作的传感头结构紧凑。在保持温度不变的情况下,实验测量了传感器加湿与除湿过程中,传感器反射光谱的变化情况,获得了dip 1的中心波长随相对湿度变化的指数拟合关系,因此利用dip 1的中心波长漂移量能够解调出相对湿度值。在保持环境湿度不变的情况下,研究了温度变化对传感器湿度测量的串扰问题,结果表明在低温范围内湿度传感器存在一定的温度依赖性,在高温时湿度传感器对温度不敏感,可以不用考虑温度串扰问题。设计的湿度传感器具有体积小、易制作、灵敏度高、响应速度快等优点,在工业生产与日常生活中具有一定的应用价值。
