变形机翼飞行器发展综述
2021-07-15白俊强
孙 杨,昌 敏,白俊强,
(1.西北工业大学航空学院,西安 710072;2.西北工业大学无人系统技术研究院,西安 710072)
1 引 言
无论在民用还是军事领域,飞行器都将面对日益复杂的飞行任务与飞行环境,需要在多个工况下具备优良性能[1]。传统固定翼飞行器采用单目标设计,以设计点性能最优为目标。现代固定翼飞行器采用多目标优化设计,能够实现多工况下性能提升,但其设计结果往往是多工况下性能的折中与权衡[2],在任何一个工况下的性能都不是最优的,更难以在所有工况下达到性能最优[3]。
与飞机相似,鸟类在飞行过程中也会面临不同的飞行环境以及机动需求,但与固定翼飞机所不同,鸟类可以通过图1所示的鸟翼形状变化来适应不同的飞行需求:(a)在平稳飞行时舒展翅膀;(b)在追捕猎物时将翅膀蜷缩后掠以减小飞行阻力,进行急速俯冲;(c)进入密林时将翅膀向内侧卷起,减小宽度以便穿越枝杈;(d)降落时将翅膀完全迎向气流来增加阻力,实现栖落机动[4]。鸟类在飞行过程中通过改变翅膀形状如展长、后掠角等来满足不同的飞行需求,在多种飞行环境中均能发挥优良性能。受此启发,赋予飞机像鸟类一样的机翼变形能力,将有助于解决多目标设计中的性能权衡问题[5-6],由此催生了变形机翼飞行器。
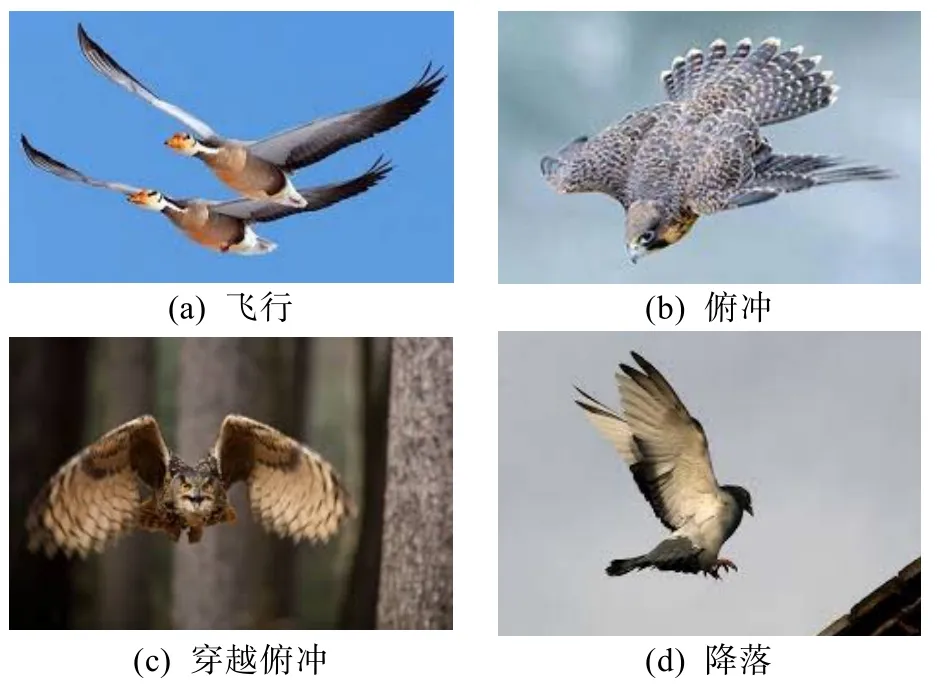
图1 鸟类飞行、俯冲、穿过密林与栖落Fig.1 Birds fly, dive, cross the forest and perch
机翼变形技术为飞行器的发展带来了机遇和挑战[7]。一方面,机翼变形为进一步提升飞行器性能带来了可能[8];另一方面,变形机构的加入引起机翼质量增加以及机械结构复杂度上升,增加了子系统设计的难度[9]。此外,变形过程中,平面形状发生变化往往牵动内部桁梁结构发生相对运动以及蒙皮面积扩张或者减缩,对结构设计、机械设计、智能材料等领域带来了全新的挑战[10]。
本文首先梳理变形机翼飞行器的发展历程,介绍典型的变形机翼飞行器并总结其发展特点。根据平面形状和翼型剖面是否变化将机翼变形分为平面形状变形、非平面形状变形和翼型剖面变形,列举3种变体类型的具体变形方式与实际工程应用。最后,总结变形机翼的关键技术并展望了未来发展趋势。
2 发展历程与发展特点
2.1 发展历程
变形机翼的概念几乎与飞机同时起源,莱特兄弟在发明飞机之初,就利用飞机机翼的不对称扭转变形来操纵飞机[6]。机翼变形技术发展至今产生了众多的变形方式与工程型号,如表1所示。机翼变形技术发展大致经历了三个阶段:萌芽阶段、初步发展阶段与平台无人化阶段。

表1 变形机翼飞行器型号Table 1 Morphing wing aircrafts
20世纪30年代初至40年代末是机翼变形技术的萌芽阶段,这个时期的飞行器以活塞–螺旋桨动力为主,机翼载荷高,因此,机翼结构设计偏向刚性机翼。虽然这个阶段仅有少量的变体飞机出现,但是,众多的飞行器平台为变形技术提供了实践基础,X-5验证机的前身正是诞生于20世纪40年代末的德国。
20世纪50年代初至80年代末是变形技术的初步发展阶段,贝尔公司率先在X-5验证机上实现了机翼变后掠技术,证明了该技术的先进性与应用价值。此后,相继出现了变展长机翼、变展向挠度机翼等。但在该阶段,飞行器设计向着高空、高速的设计目标持续发展,高、低速的设计矛盾日益凸显,而变后掠机翼则有效地解决了这一矛盾,因此,得到了持续的研究与发展,衍生出了众多的工程型号。
20世纪90年代至今是变形技术开始应用于无人机平台的阶段。无人机具有设计成本低、设计周期短、技术集成度高、飞行品质要求低等优势,也因此成为变形技术先进布局验证与应用的首选平台。该时期呈现出多样性与系统性的特点,涌现出多种多样的变形布局,如主动气动弹性机翼、变扭转角、剖面连续变弯度等,美国和欧洲等地区的研究机构针对机翼变形过程中的气动、结构、材料、机械设计等各方面开展了较为系统与全面的研究[6]。
2.2 发展特点
变形机翼技术的发展时间线如图2所示,从发展脉络来看,为追求高空、高速性能,刚性机翼普遍采用大后掠角布局以减小高速飞行阻力,但同时这样的布局恶化了低速性能,高、低速协调设计的矛盾日益凸显。因此,变形技术首先应用于技术复杂度较低的无结构相对运动、无蒙皮面积变化的整体变后掠机翼,以增加结构重量和机械复杂度为代价,实现了兼顾高、低速性能的设计。伴随着智能材料的发展,柔性蒙皮实现了机翼前后缘的连续变弯度设计与主动气动弹性设计,可扩展的蒙皮为进一步实现结构变形提供了可能,也推动了后续对驱动机构、传感器等分系统的研究工作。从发展趋势来看,变形技术向着智能、可控、轻质、低复杂度、高系统可靠性等方面不断发展与完善。智能材料、结构设计、机械设计是变形技术发展的重要动力,总体、气动与控制设计是变形技术走向工程应用的关键基础。
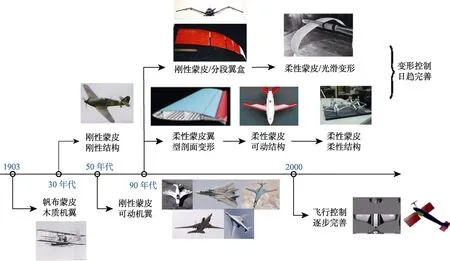
图2 变形技术发展时间线Fig.2 Timeline of morphing wing technique
3 机翼变形技术分类
机翼变形通常分为三类:(1)平面形状变形,包括后掠角、展长、弦长等平面形状参数的变化;(2)非平面形状变形,如扭转、上反等;(3)翼型剖面变形,如翼型后缘弯度、剖面厚度变化等。
3.1 平面形状变形
3.1.1 变后掠机翼
变后掠机翼是一种可随不同飞行情况而改变后掠角的设计。这样的设计可同时利用大后掠角在高速下减小激波阻力以及小后掠角速下改善升力特性的优点,但也会增加飞机结构重量和机械复杂度。飞行器通过改变后掠角来匹配不同的飞行任务与飞行环境,在多个工况下均可达到最优性能,无须在高、低速性能之间进行权衡,有效地解决了飞行器的高、低速协调设计问题。
变后掠机翼在如图3所示的F-14、B-1B、Tu-160、Tu-22M等飞机上有着较为成功的应用。图4所示为Tu-160飞机在不同工况下的机翼后掠角变化。Tu-160主翼全展20°时用于起降,主翼展开至35°时用于巡航,主翼内收至65°时用于高速飞行。变后掠机翼采用小后掠角进行起降,中等后掠角进行巡航,大后掠角用于高速飞行,不仅解决了高、低速性能问题,也减小了对起飞场长度、停泊空间的要求。

图3 变后掠飞机典型代表Fig.3 Engineering applications of sweep wing aircraft

图4 Tu-160飞机不同场景下采用不同的后掠角Fig.4 Different configurations for Tu-160 in different flying conditions
3.1.2 变展长机翼
变展长机翼是指机翼展长可变、机翼内包含可动翼段并且可将可动翼段沿轨道推出或收回的机翼。可动翼段通常包含在固定翼段内,依靠电磁作用力或者充气等方式伸出与收回[11]。伸缩机翼改变飞机展弦比和机翼面积的能力较强,机翼展开构型可赋予飞机良好的高升阻比与长时间续航能力,机翼收缩构型则减小了飞行阻力,增强了飞机的加速冲刺性能,非对称伸缩还可用于滚转控制[12-13]。
变展长机翼的驱动机构需要占据较大的机翼内部空间,同时考虑外翼段的收纳问题,机翼内翼段的厚度通常较大[14]。此外,翼段连接处会造成翼面的不连续,使整个机翼的气动性能下降[15]。可见,现阶段变展长机翼存在变形机构复杂、翼面无法光滑变形等缺陷,无法适用于高速飞行的飞机[16]。为解决翼段连接处不连续的问题,设计人员通常会在翼段连接处铺设一层高弹性密封材料,保证机翼变形时翼段间不产生缝隙[17]。
美国航空先驱伯内利早在1929年就提出了这一技术概念[11]。图5所示的俄裔工程师Ivan Makhonine设计的MAK-10 采用了一种气动可伸缩机构,伸缩机构带动外侧的机翼从内侧机翼中伸出,实现了展长和机翼面积的变化[14]。MAK-10在1931年进行了首次飞行,其展长可从13 m增加到21 m,机翼面积可从21 m2增加到33 m2。
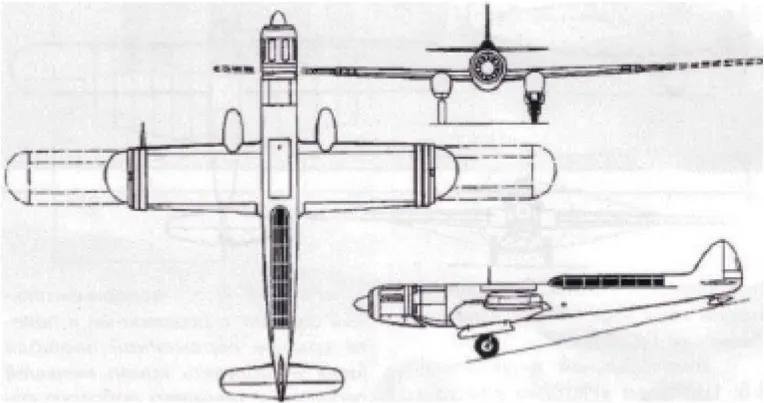
图5 MAK-10变展长机翼[14]Fig.5 Illustration of varying wingspan MAK-10[14]
3.1.3 变弦长机翼
变弦长机翼是指机翼翼段弦长能够发生变化,沿气流方向延长或者收缩的机翼。由于变弦长机翼的驱动机构需要较大的内部空间,设计难度相对较大,研究人员对此类机翼研究相对较少。智能材料和智能驱动器的发展,使得设计出质量轻、复杂度低的变弦长机构成为可能。例如,2005年,美国基石研究集团的Reed设计了如图6所示的伸缩翼肋机构,通过控制翼肋滑动,改变机翼弦长[6]。覆盖于翼肋表面的柔性蜂窝蒙皮用于保持机翼翼型,刚性翼肋可支撑柔性蒙皮以承载面外的气动载荷,该变弦长机翼最大可增加80%的机翼平面面积。
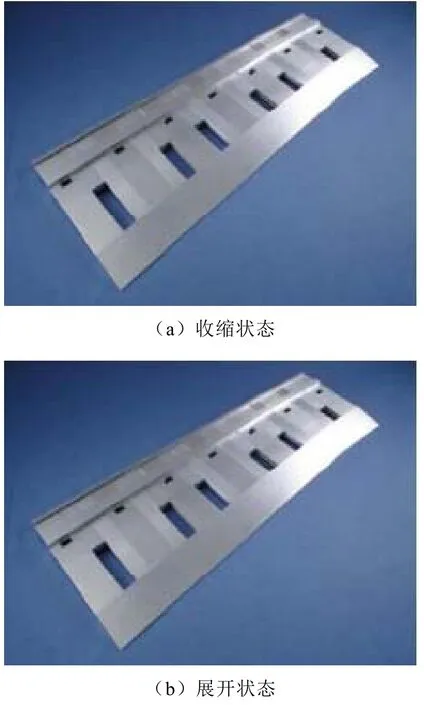
图6 伸缩翼肋机构[6]Fig.6 Structure of flexible wing rib[6]
3.1.4 折叠机翼
折叠机翼是指可绕轴旋转折向机身,能在折叠与展开状态间进行切换的机翼。折叠方式[7]主要包含两种:横向折叠与纵向折叠。横向折叠机翼在各段机翼的分离面处设置沿弦向的铰链,通过外部驱动力使分段机翼绕铰链轴转动,如图7所示。纵向折叠机翼在机身或机翼上布置有展开机构,机翼绕轴旋转至与机身共线。小展弦比布局可采用图8所示的一次折叠方式,机翼绕根部转轴向机体头部或机体尾部折叠。大展弦比布局则采用图9所示的二次折叠方式,在机翼上布置第二展开机构来连接分段机翼。折叠机翼可有效减小飞行器所占尺寸和容积,适用于筒发射或潜射的飞行器。
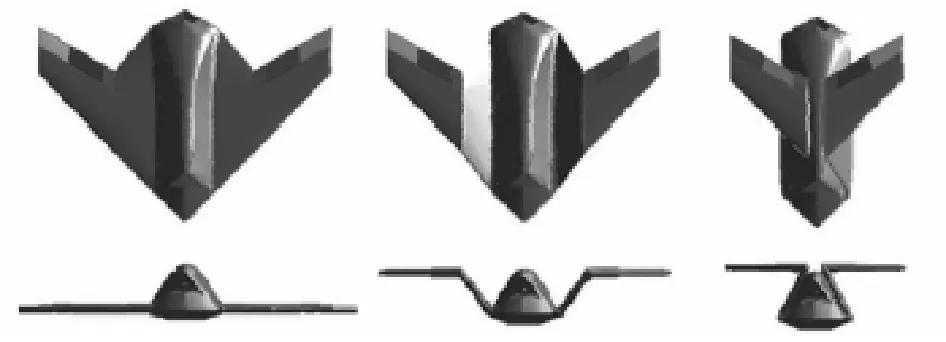
图7 横向折叠Fig.7 Illustration of horizontal folding
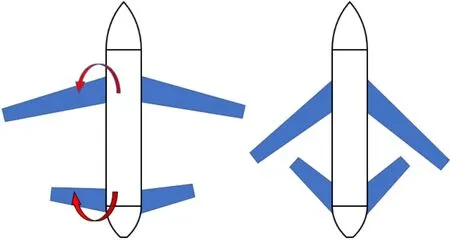
图8 串列翼布局纵向折叠Fig.8 Longitudinal folding of tandem-wing
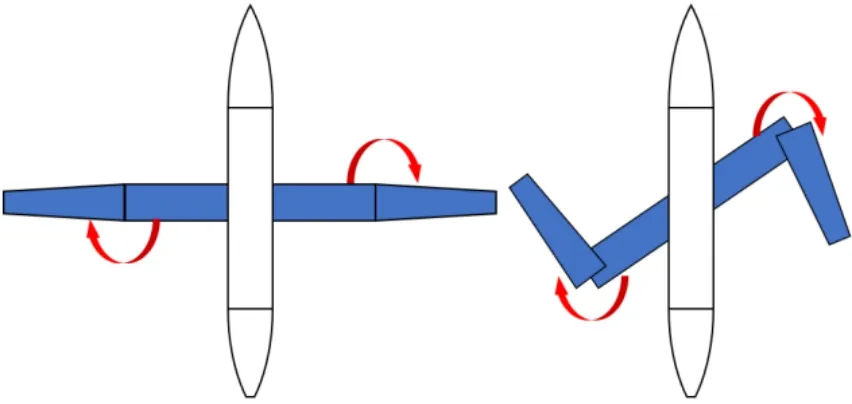
图9 大展弦比机翼纵向折叠Fig.9 Longitudinal folding of high aspect ratio wing
“鸬鹚”无人机[18]是横向折叠的典型代表,如图10所示。无人机机长5.8 m,翼展4.86 m,机身总重量不到4 t,但可携带453 kg的载荷。“鸬鹚”无人机的机翼设计成海鸥翅膀的形状,以适应导弹发射井内壁。无人机由类似机械臂的引导装置送出发射井,自行浮出水面后,将起动两部固体燃料发动机,在水面垂直起飞。

图10 潜射的“鸬鹚”无人机Fig.10 Submarine-launched cormorant UAV
“弹簧刀”巡飞弹[19]是纵向折叠的典型代表,如图11所示,飞行器系统由发射器、巡飞弹及地面控制站等部分组成。巡飞弹是其核心,最大重量约1.36 kg,长度为360 mm。在下部有前后两对弹翼折叠,可由迫击炮或火炮等身管武器发射,展开后翼展最大610 mm。

图11 筒发射“弹簧刀”无人机Fig.11 Tube-launched switchblade UAV
3.2 非平面形状变形
3.2.1 变展向挠度机翼
展向变弯度机翼是指机翼沿展向可发生弯度变化,主要包括分段挠曲变形和柔性挠曲变形,如图12~13所示。改变展向弯度可改变飞行器的滚转性能和横向稳定性[20]。这类机翼通过记忆合金线连接各翼段,控制记忆合金线的伸缩使机翼产生不同的展向弯曲度[21]。

图12 分段展向变挠度机翼[12]Fig.12 Aircraft of segmented flexible wing[12]
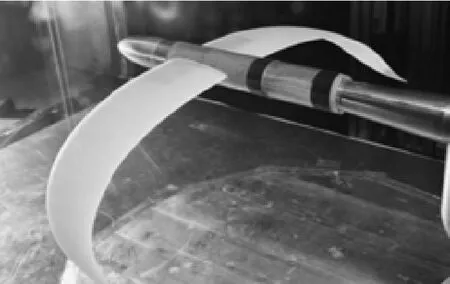
图13 连续展向变挠度机翼[12]Fig.13 Aircraft of smooth flexible wing[12]
3.2.2 变扭转机翼
变扭转机翼是指机翼剖面扭转角可发生变化的机翼。通过改变机翼扭转角来实现改变气动力和力矩,不对称扭转还可用于滚转控制。
变扭转机翼的典型代表是主动气动弹性机翼(Active Aeroelastic Wing, AWW)[22],其在原理上与莱特兄弟的机翼扭转控制类似,AAW共有4对控制面,即内外侧前、后缘控制面各一对,如图14所示。为让飞机向右翻转,通过向上偏转外侧前缘翼瓣、向下偏转后缘翼瓣, 左侧机翼将产生滚转力矩。如果设计合理,只需偏转较小角度,就能提供足够的控制而满足设计要求,此时机翼扭转变形比传统方法设计的机翼变形还小。AAW与原有机翼相比,采用更轻、更具柔韧性的材料,可完成机翼的弯曲和扭转,通过主动气动弹性变形提高飞机在跨、超声速的滚转等操纵控制能力。AAW可使飞机航程更远、有效载荷更高、燃油效率更高,能获得更优的飞行性能。
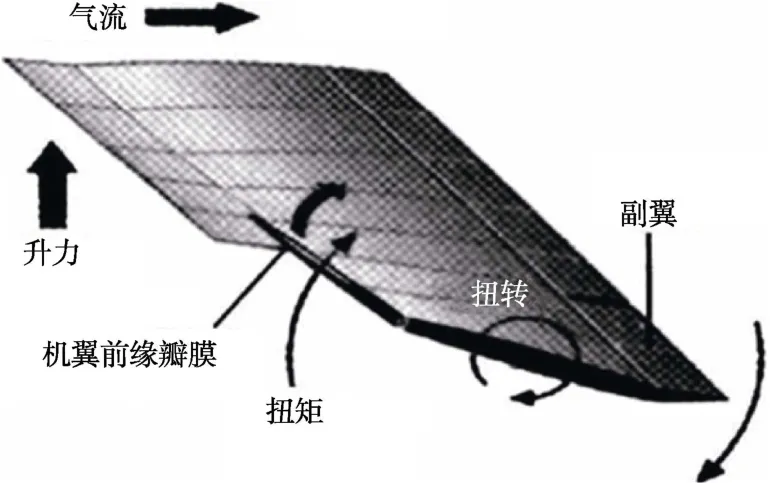
图14 主动气动弹性机翼[22]Fig.14 Active aeroelastic wing[22]
3.3 翼型剖面变形
翼型剖面变形指对机翼剖面形状的控制,主要包括改变厚度和前后缘变弯度。传统机翼的舵面操纵如襟翼、缝翼偏转本质上就是在改变机翼弯度,但舵面偏转过程中所形成的缝道会破坏机翼型面的连续性,增加阻力与噪声[23]。随着智能材料和智能驱动器的应用,连续变弯度机翼步入实际应用,驱动机构驱动机翼结构产生前后缘弯曲变形,可扩展蒙皮填补了缝道,使得机翼型面实现连续变化,改善了气动、噪声与隐身特性。
自1980年自适应机翼技术项目(Adaptive Mission Wing, AMW)[5]在改进的F-111战斗机上展示了机翼无缝可变形前后缘的优势后,研究人员将目光集中在可变形机翼的研究上。Ricci等[24]提出了基于可转动翼肋改变机翼后缘弯度的方案及基于线性滑动轴承的变形蒙皮方案,并进行了初步的方针分析。基于翼肋分段转动的原理,Poonsong[25]提出了多段可变弯度机翼的概念,通过驱动这种翼肋机构运动,可在全弦长范围内实现翼型弯度的变化。Sofla等[26]研发了一系列形状记忆合金驱动的可弯曲结构,可用来使机翼段变形。2009年,Peel等[27]研制的如图15所示的变弯度机翼,采用碳纤维材料作为蒙皮,通过气动肌肉驱动机翼产生弯曲变形,其前缘可向下弯曲14°,后缘可向下弯曲13°。新型驱动器的采用有效地降低了机翼重量和驱动机构的复杂度。

图15 变弯度翼型[27]Fig.15 Variable camber foil[27]
4 关键技术研究
机翼变形涉及气动、结构、控制、材料、机械等众多领域,关键技术主要包含以下几个方面:(1)气动性能计算方法;(2)飞行力学建模与飞行控制;(3)变形控制系统技术;(4)机翼变形结构;(5)自适应蒙皮;(6)多学科优化设计。计算方法旨在为变体飞行器的概念设计和详细设计寻找匹配的性能计算手段,在设计初期使用高效手段进行布局评估,在详细设计中则采用能反映非定常气动力的高精度方法。动力学方面则是要建立多体动力学模型,将机翼变形作为控制环节进行控制设计。变形控制系统则包含了驱动机翼变形的全部子系统,这些子系统将与可动机翼结构及变形蒙皮共同实现机翼变形。由于机翼变形常伴随着内部桁梁结构的相对运动及蒙皮面积扩展或减缩,因此,还需研究可变形的承力结构与自适应蒙皮。开展多学科的优化设计才能得出较为满意的变形机翼设计结果。
4.1 气动性能计算方法
机翼变形方式多样且在多个工况下飞行,若直接采用高精度CFD方法对变形机翼进行数值模拟,计算工作量较大。由此,在概念设计阶段催生了能快速、准确计算气动力且无须重新生成网格的计算需求。升力线理论[28-29]和涡格法[30-31]等快速估算手段在该领域取得广泛应用。但是,在详细设计阶段,为了能够细致地研究飞行器变形机翼的动态展开与流动迟滞等现象,则必须采用高精度的CFD数值模拟方法,耦合网格变形求解较为复杂的非定常N-S方程[32],不同设计需求下所运用的计算方法如图16所示。
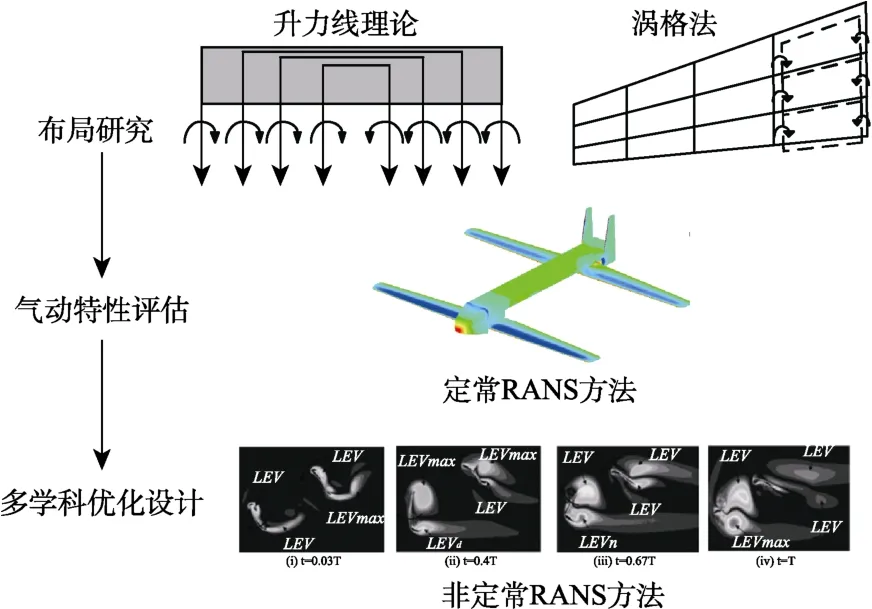
图16 不同设计需求下气动性能计算方法Fig.16 Calculation method of aerodynamic performance in different design requirement
4.2 飞行力学建模与飞行控制
机翼变形过程中,机翼与机身存在相对运动或机翼本身产生柔性变形,因此,必须采用多体动力学或柔性体动力学的方法建立动力学模型。此外,变形过程中飞行器的质心、转动惯量、气动力焦点等特征都会发生变化[33],气动力模型具有较大的非定常性与非线性,无法直接采用小扰动方法进行简化[34]。上述特点大大增加了变体飞行器的飞行力学建模、仿真以及控制设计的难度。
变体飞行器的飞行控制系统需要在变形结构按预定程序变形时维持飞行稳定;或者更进一步,将变形机翼(或其他变形结构)作为附加的飞行器操纵机构[35],利用图17所示的机翼变形引起的空气动力学效应辅助操纵,甚至完全操纵飞行器,实现飞行器的机动控制。
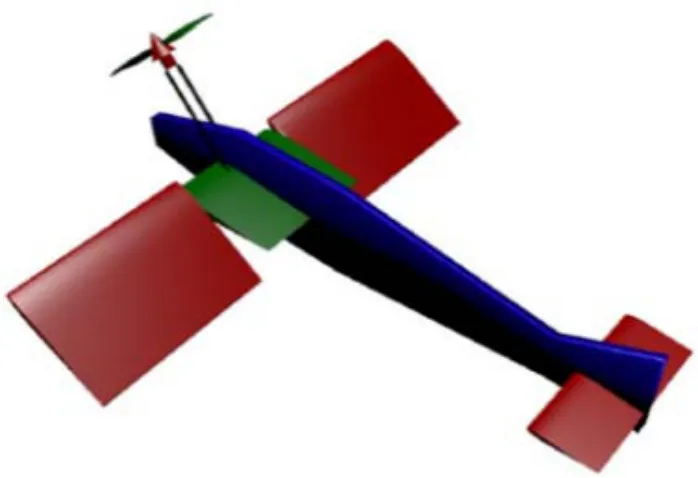
图17 变形机翼气动力矢量控制[35]Fig.17 Illustration of aerodynamic vectoring morphing wing[35]
4.3 变形控制系统技术
变形控制系统是指涉及机翼变形相关的全部系统,主要包括驱动机构、机械传动机构、传感反馈、限位机构、储能系统、变形控制单元6个部分。驱动机构是指为机翼变形提供主动作用力或力矩的机构,其本质是将电能、燃料化学能等其他形式能转化为机械能,从而驱动机翼运动。驱动机构主要包含集中式驱动与分布式驱动[36]两种结构形式。集中式驱动变形结构制作较简单,但驱动器承受的载荷大,对其强度要求高,导致结构重量大,且变形方式固定单一,如只能改变后掠角,驱动器故障时将导致飞行器失效[37]。分布式驱动变形结构中,多个驱动器分担载荷,有助于减轻结构重量,变形形式灵活,鲁棒性强,在部分驱动器发生故障时可保证飞行器具有足够的可控性[38]。机械传动机构是指将驱动机构作用力传递至可变形结构上的部件,基本原理是通过杆、滑块、铰链机构所组成的系统传递位移与作用力。
变形控制系统工作流程如图18所示,当飞控系统根据机动或稳定性要求解算出相应的机翼变形运动指令后,将运动指令传达至变形控制单元,变形控制单元根据指令产生驱动控制指令,驱动机构根据控制指令输出作用力,经机械传动将集中作用力传递至各运动部件,传感器实时监测机构运动是否达到指定位移、角度、速率和角速率等要求并向控制单元反馈,变形控制单元接受反馈信号进行指令修正从而消除误差。当到达指定位置时,限位机构将机翼在当前位置锁定,驱动机构解除作用力,储能系统也随之停止供能。
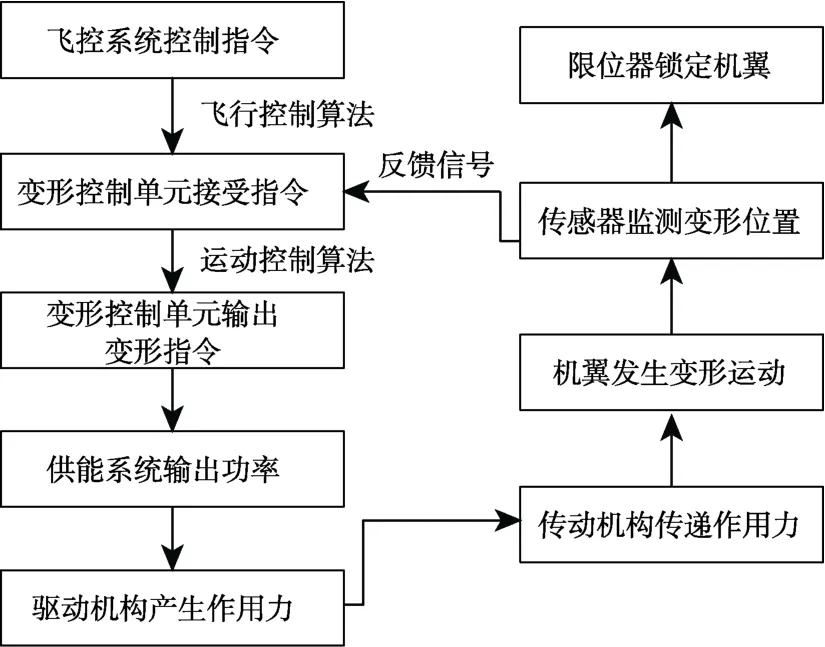
图18 变形控制系统工作流程Fig.18 Workflow of morphing control system
4.4 变形机翼结构设计
不同的变体类型常采用不同的结构设计,主要可以分为两类,非平面形状变化的结构设计与变平面形状机翼的结构设计[39]。非平面形状变化如变扭转、上反、剖面形状等,机翼变化较为单一,结构设计较为简单,每一段可进行单独的结构设计。变平面形状机翼的结构主要针对变后掠、变弦长、变展长三种类型[40]。此外,机翼结构发生形状变化时,还会伴随着蒙皮的扩展或收缩,因此,蒙皮必须具备自适应的变形能力。
4.4.1 非平面形状变化的结构设计
洛克希德·马丁公司的Z形变形机翼[41]与佛罗里达大学的仿鸥鸟机翼[40],均采用分段机翼,如图19所示。每段机翼自身不具备变形能力,设计较为简单,仅在连接位置设置旋转机构和蒙皮密封。

图19 鸥鸟机翼[40]Fig.19 Gull-wing aircraft[40]
后缘连续变弯度设计[42]是另一种较常见且易实现的变形方式,如图20所示。柔性后缘为依次连接的铰接片,由驱动器和传动机构驱动产生连续弯曲变形,外部自适应蒙皮进行相应的面积扩展与收缩,保持贴附。

图20 可变弯度机翼的后缘装置[42]Fig.20 Rotating rib concept of trailing edge[42]
4.4.2 变平面形状的结构设计
新世代航空提出的滑动蒙皮方案[43]将机翼结构分为图21所示的三个主要部分:桁梁等主承力部件、根部滑动组件、内部结构主动变形单元。变形过程如图22所示,结构变形单元利用铰接四边形的一自由度特征,在机翼变后掠过程中能发生相应变形,其内部包含驱动机构、转动轴及四边的分段承力结构。在根部区域,变形单元由三角形构成,由滑动组件提供额外的变形自由度。当机翼产生变形时,驱动器推动四边形发生运动,根部滑动组件也会产生相应变形,从而推动前缘的桁梁等主承力部件发生变后掠运动。
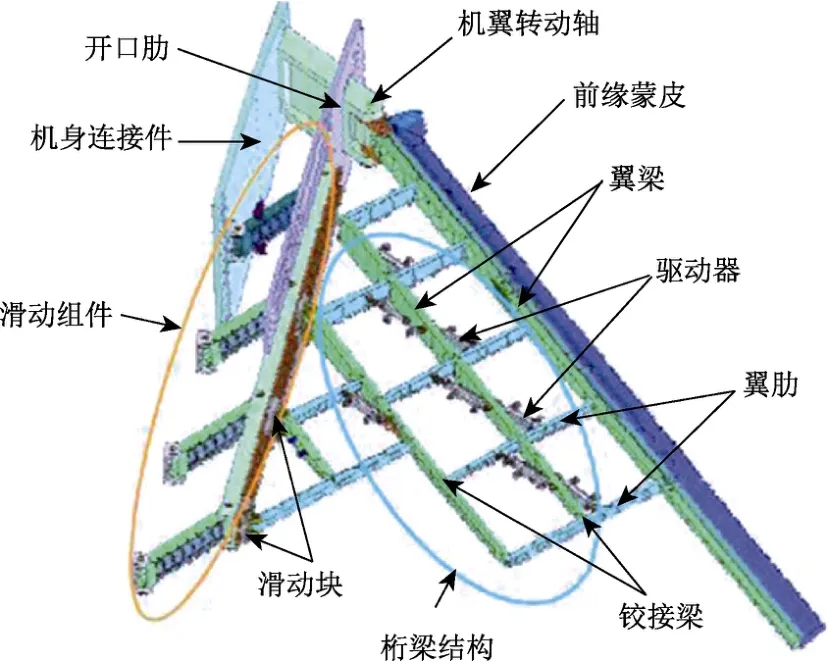
图21 变后掠机翼结构[43]Fig.21 Structure of sweep wing[43]

图22 结构变形单元Fig.22 Structure unit of morphing wing
机翼平面形状变化类型较多,不仅有弦长、展长的变化,实际使用中还会受到气动载荷引起气动弹性变形,因此,自适应变形的机翼更具有应用前景,宾夕法尼亚大学采用图23所示的蜂窝状结构[44]作为微小单元填充机翼,每个单元外部为八根铰接杆,内部有弹性线与驱动机构,能实现主动可控变形及自适应的挠曲变形。
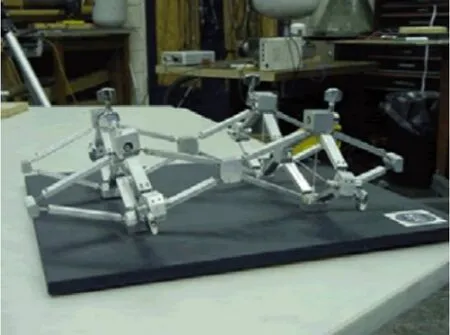
图23 柔性蜂窝支杆结构Fig.23 Compliant cellular truss structure
4.4.3 自适应蒙皮
机翼平面形状的变化要求蒙皮材料能进行适当的面积延展,因此,刚性的金属蒙皮不再适用,取而代之的是具有扩展性的压电材料[45]、高聚物[46]、层压薄膜材料[47]与记忆合金[48]等。压电材料因其响应特性和调频特性而为变体飞机结构设计青睐,其可实现电能和机械能之间的转换。具体材料的选取要根据驱动应力、作用力、位移和变形速度、电压及响应速度来决定。形状记忆合金因其变形与电压关联的简便特性在蒙皮选材中受到广泛关注。Cornerstone Research Group[6]提出的自适应蒙皮采用记忆合金,如图24所示,该材料可在不同温度下呈现出不同的形状。除记忆合金外,Nano Sonic[6]提出采用纳米技术制造的全新金属橡胶(Metal Rubber),如图25所示,金属橡胶材料具有较好的延展性、耐高温性。此外,宾夕法尼亚大学的学者还提出仿照鱼鳞或机场行李传送带的层叠机构,在机翼蒙皮布置分片的小块重叠蒙皮,实现蒙皮的连续变形[6]。

图24 自适应蒙皮[6]Fig.24 Self-deploying polymer material[6]
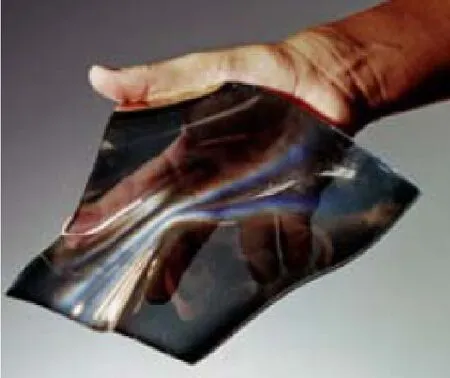
图25 金属橡胶材料[6]Fig.25 NanoSonic’s Metal Rubber[6]
4.5 多学科优化设计
除了流体力学、结构设计、飞行控制等传统领域,变体无人机也搭乘了机器学习、机械设计等领域的发展浪潮,出现了机器学习与自适应动态逆控制方法相结合、强化学习控制策略与轨迹跟踪相结合的新方法[49]。同时,变体飞行器也带来了设计方法的变革,依赖历史数据和CFD手段的设计流程不再适用,取而代之的是基于物理学原理的包含高可信度工具的设计方法,其中,响应面模型可高效地将物理学原理引入早期的设计之中并实现全局的优化搜索[50]。
5 结 论
现代飞行器追求多工况下性能提升,但针对固定外形开展设计,其设计结果往往是多工况性能的折中与权衡,为满足某一性能指标需牺牲一定的其他性能。换言之,固定外形的多工况设计在任何一个工况下性能都不是最优的。鸟类通过变换鸟翼形态适应不同飞行环境,受此启发,赋予机翼变形能力能有效解决多目标设计所带来的矛盾。广义来看,所有机翼都并非绝对刚性,均具备变形能力,但速度快、幅度大的变形机翼及其工程应用在近几年才崭露头角。本文总结了变形机翼飞行器的分类方式与关键技术,列举了平面形状变形、非平面形状变形和翼型剖面变形的具体变形方式并对实际工程应用进行了介绍。机翼变形技术涉及气动、结构设计、飞行控制、机械动力学、材料等众多领域,在为提升飞行器性能带来无限可能的同时,也对飞行器设计带来巨大挑战。
传统观点认为,变形机翼引入驱动器、机械传动等机构,引起机翼结构重量增加,机械复杂度上升,系统可靠性下降,飞行控制设计增大,难以走向实际应用。实践表明,变形机翼虽然给机翼设计带来上述不利影响,但也带来全局优势,F-4、F-14等飞行器的成功应用就是有力佐证。换言之,目前的变形机翼飞行器是以结构重量的代价换取性能提升,以牺牲本体性能换取全局性能增益。但在未来,随着结构设计、材料及机械设计等技术的进步,极有可能实现本体与全局性能的共同提升,以变形机翼代替传统舵面进行飞行控制,取消襟翼及襟翼驱动设备,在较为简单的结构框架下实现功能,不仅不会引起重量增加与机械复杂度上升,甚至可能实现子系统减重和全局性能提升的双收益。
变形机翼飞行器将成为高性能、高智能化、高技术集成度的多用途飞行平台。目前,变形机翼飞行器进入了多学科优化设计的阶段:气动外形与变体结构的一体化设计需要进一步强化;折叠变形展开过程中的非定常气动力与动态过程的模拟手段亟待解决;机械、电气等设备的小型化与集成化是未来的重要方向;利用主动气动弹性驱动机翼变形能挖掘变体飞机新的潜力。将拓扑优化、机器学习、先进控制等技术引入变形机翼设计之中,可激发变形机翼飞机新的生命力。