面向水下目标搜索的USV&UUV编队协同队形规划
2021-07-15邹佳运张文清曲泓玥
邹佳运,张文清,曲泓玥,孙 巍
(1.中国人民解放军海军潜艇学院,青岛 266199;2.青岛海洋科学与技术试点国家实验室,青岛 266237)
1 引 言
无人探测技术具有隐蔽性好、配置灵活、成本低廉、无人员损失、可在恶劣偏僻地区长时间工作等优势。在水下目标的无人探测中,较常见的为无人水面航行器(Unmanned Surface Vehicle,USV)系统及无人水下航行器(Unmanned Underwater Vehicle, UUV)系统,其中USV工作于水面,其搭载能力较强,能源方面可搭载大量的蓄电池甚至内燃机系统,可支撑先进的实时通信系统和高性能数据处理系统;UUV工作于水下,其搭载量的限制使其在能源方面只能依赖于搭载的蓄电池,故其航速慢、通信能力差、数据处理能力低,但在水下工作时,由于不受海面波浪影响,声学传感器的工作平台更为稳定,同时受海面风成噪声及雨噪声的影响更小且可利用可靠声路径进行探测,其水下目标探测能力更强。
以往的无人编队问题研究大多集中于同构编队[1-2],同构编队虽然可有效提高探测效能,但编队中平台类型和功能单一,限制了其应用的灵活性。异构编队探测是目前集群探测研究的热门方向,根据各种类平台的特点,合理分配各平台任务,扬长避短,提高整体探测效能[3]。USV和UUV作为主要的海洋无人装备,可根据各自特点构建USV&UUV系统,UUV以其优秀的探测能力,承担水声信号的收集任务;USV则以其优秀的通信、数据处理能力[4],承担与岸基或有人母船的数据传输和对编队中各UUV的指挥控制、信息融合任务,由此构成以USV为中心的集中式搜索编队。
在无人编队探测系统中,各平台的阵位是决定系统效能的重要因素,在上述的异构编队中,各UUV如何围绕USV构成编队决定了搜索的效能。以往针对编队的研究一般主要集中在避碰及编队控制上[5-6],而对编队队形的研究大多只限于几种常见队形的性能比较[7-8],其队形来源于直观经验,缺乏理论支撑,无法自证最优。针对此问题,本文通过理论建模,构建可信的编队探测效能评估方法,并给出适应复杂任务需求的优化准则设立方法,最后通过粒子群优化算法给出USV&UUV编队的最优搜索队形,以期切实解决异构编队的最优队形规划。
2 编队探测效能评估方法
为直观、定量评估编队的探测能力,需要建立编队区域探测能力的评估模型,针对多传感器的覆盖问题,现已有体系化的研究[9],但评估方法大多以划定探测范围圆的方式建立二元感知模型。为直观、定量评估编队的探测能力,并简单体现平台协同特性,建立基于栅格法的编队区域探测能力概率感知模型。将目标海区栅格化,人为编队对各栅格中心点处目标的探测能力即对栅格内各处目标的探测能力,通过水声环境构建及探测系统仿真,计算编队对目标的检测概率。
2.1 水声环境构建
为体现探测系统的协同探测效能,需要建立描述系统探测能力的概率感知模型。UUV受能源约束,一般以被动方式进行声学探测,对其性能评估利用被动声呐方程:

其中,SNR为声呐接收端信噪比;SL为被动声源级;TL为传播损失;NL为海洋环境噪声;DI为接收指向性指数。
传播损失TL定量地描述了声波在传播一定距离后声强度的衰减变化,其大小主要与传播距离有关,若声波以球面波扩展,则传播损失可表示为

其中,r为目标到声呐接收端的距离,单位为m。
在声呐方程的各声呐参数中,只有TL会受平台位置的影响,定义声呐的品质因数为[10]

在相同的声呐及海洋环境下,组成品质因数的各声呐参数值是不变的,故在同一仿真场景下,FOQ为固定值。
声呐方程可改写为

2.2 探测系统仿真
通过式(4)可获得仿真场景中已知目标距离下的声呐接收端信噪比,为便于衡量编队的协同探测能力,需要计算各平台及编队系统的目标检测概率,接收端信噪比SNR与目标检测概率间的换算则需要通过ROC曲线实现。
高斯噪声中的无起伏信号,其幅度分布服从莱斯分布:

其中,σ为噪声标准差;R为信噪比;J0为第一类零阶贝塞尔函数。
定义马库姆Q函数:

由此,检测概率pd可表示为
其中,pf为虚警概率。
虚警概率pf可由检测阈DT估算[11]:

根据式(7)和式(8)即可计算声呐系统对应信噪比下的检测概率。
遍历各网格中心点,即可获得单平台对区域内目标的探测能力结果。当多平台协同探测时,利用取或的方式计算编队系统的总检测概率,若UUV数量为N,则总检测概率P为
其中,pi为第i个平台的目标检测概率。
2.3 评估示例
编队中存在4个可进行声学探测的UUV,若令USV所在位置为(0,0)点,编队前进方向为y轴正方向,USV的通信范围为5 km,4个通信范围内的UUV坐标为(0, 5)、(–4, –2)、(–4, 0)、(4, 0),UUV搭载声呐系统的品质因数为70 dB,检测阈为1 dB。
评估过程中,首先应划定评估海区,要求该海区完全包含探测系统的探测范围,为保证评估结果的准确性,可在计算能力允许的条件下,尽量大地划定评估海区。在对评估海区栅格化的过程中,划分的步长越小则评估结果越精细,但计算量也随之明显增大,其选取原则为在保证探测能力分布图平滑的基础上,选择最大步长。
在该示例中,选取20 km×20 km评估海区,栅格步长200 m。图1为该探测编队在区域内的目标探测能力分布,“+”处为USV位置,4台UUV围绕在USV周围并以“*”标注,虚线表示USV通信范围,图中各处的颜色代表了编队探测系统对该处目标的检测概率,该评估结果可直观地显示探测系统对区域目标探测的能力。
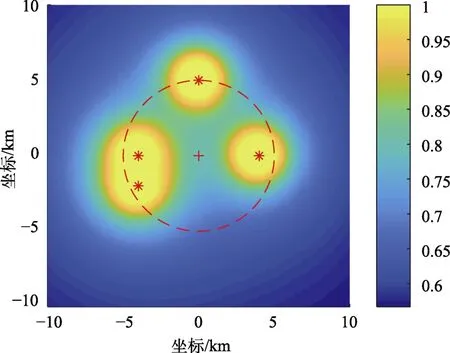
图1 编队检测概率分布Fig.1 Detection probability distribution of formation
3 优化准则
为准确描述探测系统的效能,需要对其性能定量化描述,并以之为准则对参数进行优化。
3.1 多准则优化问题
3.1.1 正面探测宽度
异构编队中,各UUV在通信距离的限制条件下组成编队队形。在移动编队的目标搜索任务中,编队的正面搜索宽度十分重要,在编队航速一定的条件下,正面宽度越大,单位时间搜索面积越大,搜索效率越高。
在垂直于编队前进方向上,在编队的前方建立一条检测线,编队经过检测线的过程中,线上各点处目标的最大检测概率作为编队的正面检测能力。在程序上可如下实现:
(1)以y轴为编队的前进方向建立直角坐标系并划分栅格;
(2)通过评估模型计算各栅格内目标的检测概率,形成区域检测概率矩阵;
(3)取每个横坐标下的检测概率最大值构成正面检测概率曲线。
以2.3节的示例为例,规定该编队的航向为y轴正方向,则正面检测概率曲线即区域检测概率矩阵各列最大值。
如图2所示,正面检测概率曲线右侧的两个峰主要由单个平台贡献,左侧的峰则由两个相互靠近的平台协同贡献,故左侧峰宽于右侧两个。若认为检测概率大于0.7为有效覆盖,则有效正面探测宽度为15.9 km。
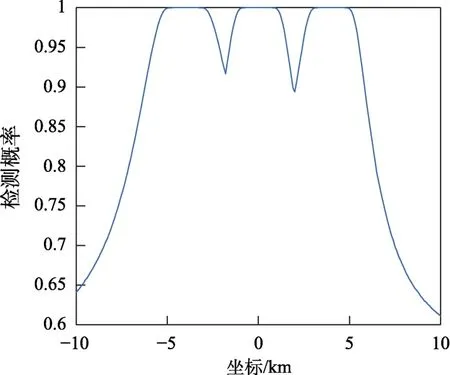
图2 正面检测概率曲线Fig.2 Probability curve of frontal detection
3.1.2 区域覆盖面积
平台间距离过近会导致各平台的覆盖区域重叠,降低覆盖效率;而平台间过远则会影响协同效果,亦会降低覆盖效率。故合理地规划阵位能够提高探测系统的区域覆盖能力。
在计算编队的区域覆盖面积时,以有效覆盖的栅格数乘以栅格面积计算。在2.3节的示例中,若认为检测概率大于0.7的栅格为有效覆盖,栅格宽度为200 m时,有效覆盖的栅格为3945个,有效区域覆盖面积为157.8 km2。
3.1.3 多准则融合方法
若单纯地追求正面宽度最大,各平台会聚集在垂直于搜索航向的通信范围圆的直径上,当UUV平台数量较多时,过于聚集的队形对正面宽度的提升贡献减小,并造成资源浪费。为解决此问题,要求在正面宽度最大的前提下各平台同时覆盖的总面积最大,在此涉及多准则优化问题。
一般的优化算法要求优化准则单一,对于多准则优化问题,则需要将多准则融合为单一准则。
层次分析法(Analytic Hierarchy Process,AHP)是一种实用的多准则判决方法[12],该方法通过将复杂问题分解为若干层次和若干因素,对两两指标之间的重要程度作出比较判断,建立判断矩阵,通过计算判断矩阵的最大特征值以及对应特征向量,得出不同方案重要性程度的权重,为最佳方案的选择提供依据。
如图3所示,利用层次分析法的思想将优化问题分为两层:目标层和指标层,其权重向量为u=[u1u2]。

图3 层次示意图Fig.3 Structure of the hierarchy
对两个指标设定分数集,若探测半径为r,USV通信距离为R,在正面探测宽度方面,规定探测宽度为2r时给予0分,探测宽度为(2R+2r)时给予10分,其余探测宽度值对应的分数根据此两点插值计算;在区域覆盖面积方面,规定覆盖面积为 πr2时给予0分,覆盖面积为 π(R+r)2时给予10分,其余覆盖面积对应的分数根据此两点插值计算。值得注意的是,这里的10分并不是分数上限,由于平台间协同探测带来的探测增益,探测能力的极值可能超过10分所对应的值,且其实际极值不易估计,故在这里不对分数上限作出约束。若正面探测宽度的分值为a,区域覆盖面积的分值为b,则其综合分数score可表示为

由此将两个准则融合为一,利用该单一参数表示编队的目标探测效能。
3.2 平台避碰约束
海洋环境下,海流情况复杂,且UUV大多处于欠驱动状态,其所在位置难以精准控制,为避免平台相撞,应限制平台间的距离,以免平台间过近。
将平台避碰因素加入优化准则,规定平台间的最小安全距离rmin,遍历所有两两平台间距离,若存在距离大于rmin者,则规定其综合分数为0,使该组队形解在优化中被淘汰。
4 编队队形优化方法
针对复杂的性能函数模型,需要利用群智能算法计算最优解。粒子群优化算法(Particle Swarm Optimization, PSO)[13]是一种经典的群智能优化算法,它通过模仿鸟群的觅食行为实现优化。
针对该队形优化问题,假设粒子群规模为M,UUV数量为N。由于UUV位置受USV通信范围约束,故以USV所在位置为极点,以编队前进方向为极轴建立极坐标系,各UUV以极径和极角确定其位置,则解空间的维度为2N,第t次迭代时,粒子i的位置可表示为

其中,ri1,… ,riN为各UUV的极径;θi1,…,θiN为各UUV的极角,i= 1,2,…,N。
相应地,粒子的运动速度可表示为

其中,vi1,… ,viN为径向速度;ωi1,… ,ωiN为角速度,粒子的运动速度可根据式(13)进行更新:
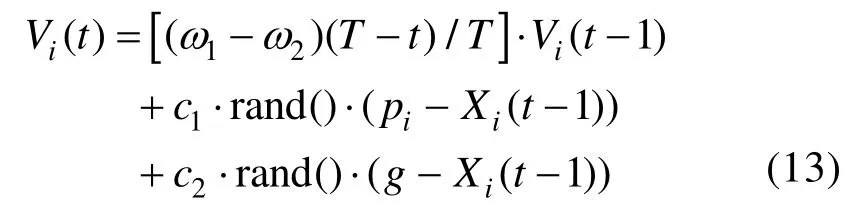
其中,ω1、ω2为惯性权重;c1、c2为学习因子;T为最大迭代次数;pi为粒子i的历史最优解;g为全局最优解。
粒子的位置则由式(14)计算得到:

粒子位置更新后,计算粒子的性能函数值。首先计算两两平台间的距离,若存在平台间距小于安全距离的情况,则直接将性能函数值置零;对于平台间距均大于安全距离的粒子,则通过3.1节的方法,计算其正面探测宽度及区域覆盖面积的综合评分作为性能函数值。
优化过程通过不断地更新粒子运动速度和位置实现,随着迭代的进行,各粒子会渐渐向性能函数值最佳的最优解靠近,直至达到迭代停止条件后输出最优粒子对应的解。优化算法流程如图4所示。

图4 优化算法流程Fig.4 Flow chart of optimization algorithm
5 编队队形优化示例
水下目标探测编队包含1个USV和4个UUV,USV的通信距离为5 km,UUV搭载声呐系统的品质因数为70 dB,检测阈为1 dB,以USV所在位置为原点,以编队前进方向为y轴建立坐标系,规定编队平台间的安全距离为100 m,正面探测宽度与覆盖面积的权向量为[0.7, 0.3],认为检测概率大于0.8即为有效覆盖,粒子群优化算法参数为T=250,M=8,c1=c2= 1.5,ω1=0.9,ω2= 0.5。
如图5所示为队形优化前后的探测态势对比。其中图(a)为优化前各粒子随机初始化后,评分最高的粒子所对应的阵位解,该随机队形的正面宽度为16.8 km,探测覆盖面积为189.76 km2,综合评分为11.53;图(b)为经过优化后的最优队形,UUV坐标为(4.89, –1.0429),(4.9155, 0.9155),(–4.8736, –1.1170),(–4.9268, 0.8527),该异构编队的探测覆盖面积达到208.88 km2,正面探测宽度达到20.4 km,综合评分达到14.57。图6为该优化过程的进化曲线,可见随迭代进行,综合评分提高,且250次迭代足以使寻优过程收敛。

图5 队形优化前后检测概率分布对比Fig.5 Comparison of detection probability distribution before and after formation optimization

图6 队形优化过程进化曲线Fig.6 Evolution curve of formation optimization
该示例中,由于正面探测宽度的比重较重,故优化结果倾向于更大的正面探测宽度。优化结果的正面探测能力如图7所示,平台分布在垂直于前进方向的通信范围的远端,能有效扩大对两侧的探测距离,编队的中心区域距离各平台较远,故目标探测能力有所减弱,但其目标检测概率仍高于有效阈值。
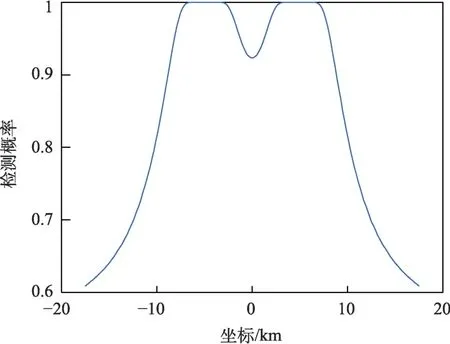
图7 正面探测能力分布Fig.7 Distribution of frontal detection capability
重复进行10次队形优化计算,平均用时17.89 s,所用计算机处理器为Intel Xeon,主频3 GHz。无人航行器的航速一般较低,该量级的运算时长一般能够满足海上作业要求。
若正面探测宽度与覆盖面积的权向量为[0.3,0.7],其他参数不变,则优化结果如图8所示。
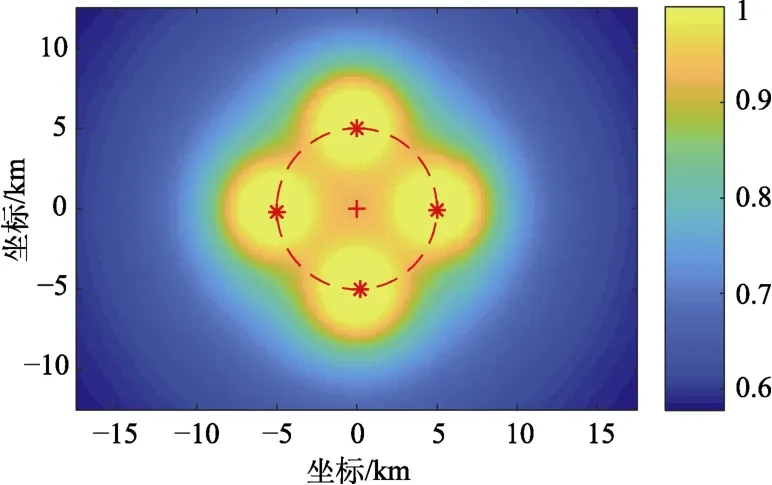
图8 优化后检测概率分布Fig.8 Distribution of detection probability after optimization
优化后,各UUV的坐标为(4.9994, –0.0762),(–4.9961, –0.1970), (0, 5), (0.2040, –4.9958),该示例中由于覆盖面积的权重较高,故各平台分散分布于通信范围圆上,由于要兼顾正面宽度,故在垂直于前进方向上规划有两个平台。正面探测能力分布如图9所示,左、右两个峰各由一个平台贡献,中间峰由两个平台贡献,但由于中间两个平台前后分布且距离较远,协同增益弱,故三个峰宽度相当。在该准则下,编队的覆盖面积为237.72 km2,正面探测宽度为18.8 km。

图9 正面探测能力分布Fig.9 Distribution of frontal detection capability
6 结 论
USV&UUV异构编队的队形影响编队对目标的搜索效能。本文依据声呐方程,建立了UUV声学目标探测的概率感知模型,依据该模型,可为以单USV为通信节点的UUV编队的探测性能提供评估结果,并可提供正面探测宽度及区域覆盖面积数据。在复杂任务需求条件下,为获得单一的优化准则,采用层次分析法的思想将多优化准则合一,并可通过权向量调整各指标的权重,进而借助粒子群算法求得该优化准则条件下的最优队形解。
算例结果表明,该方法可有效地给出异构编队的队形规划建议,明显提升探测搜索效能,且可根据各指标的权值,给出针对性规划建议。