适用于城市作战的柔性充气式侦察系统设计
2021-07-15李沫宁肖致行李文光孟军辉
李沫宁,肖致行,李文光,孟军辉,2,刘 莉,2
(1.北京理工大学宇航学院,北京 100081;2.飞行器动力学与控制教育部重点实验室,北京 100081)
1 引 言
随着人类文明进程的推进,世界人口将进一步向城市集中,根据联合国统计,到2030年将有2/3的人口生活在城市地区[1]。城市越来越成为战争的重心和局部战争的焦点。城市是由人造自然地形、相当数量和密度的人口以及大量的基础设施互相融合构成的综合体。战时需要的地下防空设施、制高点建筑、有线无线通信都会纳入新城市的规划建设,因此新型城市也是易守难攻、明暗分明的军事防御城堡[2]。
城市高层建筑物林立,装甲车、坦克等重火器难以机动,顶甲易受到来自上方的攻击。城市军民目标混杂,作战时也要考虑避免伤害居民和基础设施,因此传统地毯式轰炸难以为继,攻方兵力和技术装备优势难以发挥,易于守方保存隐蔽有生力量。掌握己方与敌方分布及在阵地之间转移情况,提高对战场的感知能力,获取信息优势实现精确作战和快速打击是未来城市作战的基础和关键[1]。
在城市作战中,行动编队在空间上常被房屋墙体分割成数个独立的作战单位,空间狭小、视野受限,不利于侦查,因此封闭空间和地下空间是城市作战的重点及难点。封闭空间内的通信无论是无线电通信还是卫星通信都会受到墙壁、建筑物的影响[3]。因此需要一种能克服通信困难,加强电子战防护,确保信息完整性、安全性[4],更加小型化、灵活性更高的可深入封闭空间内部的侦察系统,与无人机等外部侦察系统配合,多平台协同交互[5],进行精确侦查打击,实现外科手术式的定点摘除。
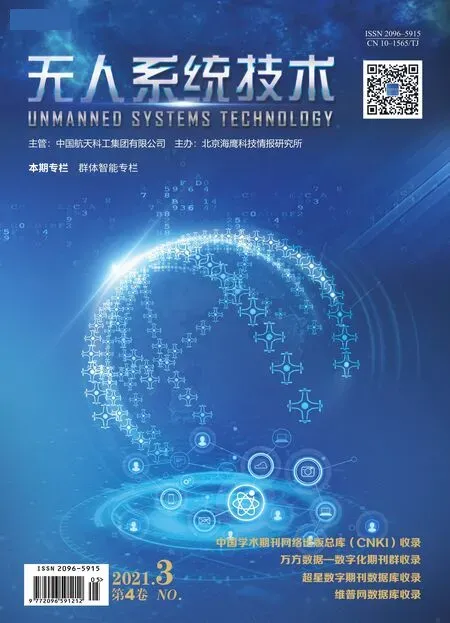
近年来出现的具有代表性的侦查机器人有以色列ODF光学有限公司的“眼球”R1监视侦察器、美国机器人公司IROBOT生产投入实战取得理想效果的PACKBOT机器人[6]、明尼苏达大学研制的Recon Scout侦查机器人等[7]。PACKBOT与Recon Scout侦查机器人均具有抗摔打能力,从窗口投入室内仍可正常工作,Recon Scout甚至可以用迫击炮或无人机发送落地进行侦察,如图1所示。但也都存在隐蔽性不强、能源不持久、通信系统易被屏蔽、行进路径易被阻隔等问题。
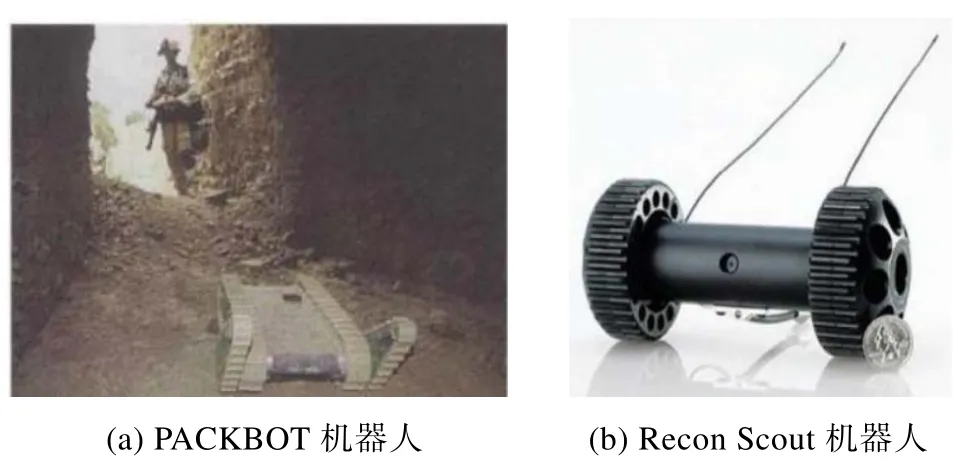
图1 小型侦查机器人Fig.1 The small-sized scout robot
因此,亟需设计新型无人移动平台,在街区道路、建筑物台阶、地下隧道等易于行进的路径被敌军设置障碍或被战争废墟阻隔后,充分利用建筑物门窗缝隙、通风管道、地下排污口等厘米级尺寸范围内的微小狭窄通道,真正实现“无孔不入”的全方位渗透,同时兼顾通信的有效性。
自然界的生物经过数亿年的发展演化,其结构、行为、原理,具有完美的生物合理性和对外界环境的适应性,可为科学技术创新提供灵感[8]。藤蔓及菌丝等生物根据环境刺激从它们身体顶端向前生长,长度可以增加数百倍,生长时已伸展部分不会与外界环境产生相对滑动[9]。斯坦福大学将其应用于天线[10]、手术内窥镜的设计中[11]。
基于类似的仿生原理,本文将侦察平台与尖端自生长概念相结合,开展可单兵携带的气压驱动柔性仿生尖端生长移动侦察平台的设计论证,拟利用气囊的顶端生长通过排水通风管道、门窗缝隙或废墟深入建筑内部,且顶部搭载相机等传感器与平台有线连接解决通信障碍及供电问题,实现长时精确侦察。
2 柔性充气式无人侦察系统设计
本文设计的柔性充气式无人侦查移动平台由平台本体、尖端外翻生长气囊、尖端载荷三部分协同实现通过地面建筑物门窗缝隙、通风管道、地下排污口等狭窄通道对敌方进行全方位渗透侦查、破坏打击,如图2所示。
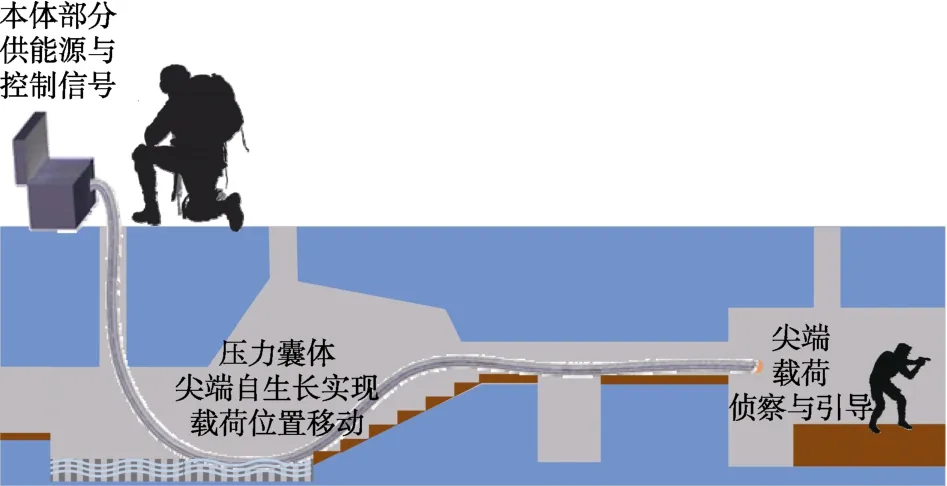
图2 可尖端自生长压力驱动软体运动平台示意图Fig.2 Schematic diagram of the airbag movement platform driven by self-growing pressure at the tip
移动平台本体是可生长软体的收纳空间,也为该装置提供能源、气压、控制信号,在气囊尖端快速生长过程中始终保持位置固定。尖端载荷可根据任务需求,装载微型摄像机、红外探测器、电子干扰器等。以微型摄像机为例,软体移动装置尖端自生长过程中,连接尖端载荷和本体部分的光电线缆随之不断伸长,保证侦察探测到的信息可实时传输至本体部分,亦可得到持续供给的能源,实现信息的有线传输及长时监测,并通过图像识别和自主导航控制气囊转向。
尖端外翻生长气囊未充气前整体缠绕于卷轴上,置于移动平台内部,外翻后通过夹持装置固定在本体前端,与本体气室形成压力控制回路,气囊端部随着气体充入不断外翻,实现尖端向前生长,同时已展开部分与外界无相对滑动,避免摩擦、刮伤损毁。为实现气囊空间上的转向,沿气囊周向布置了4个小气室用于方向控制,通过电磁阀控制小气室进气口开关,差动控制4个小气室的充气速率实现转向。通过步进电机进行软体前行、收回,如图3所示。

图3 含方向控制气室气囊示意图Fig.3 Schematic diagram of the airbag with directional con-trol chamber
3 无人侦察系统动力学建模与仿真
气囊充气过程涉及气体高速流动、气体与气囊相互作用、气囊与外界物体相互作用等复杂物理现象,描述气囊充气展开的方法经过了长时间的发展,正逐渐完善。主要方法有控制体积法、ALE法、粒子法。控制体积法将气囊视为一个可控制的体积,充气过程为绝热过程,充气气体视为具有恒定比热的理想气体,在控制体积内温度和压强是均匀一致的,能很好地描述展开后期与环境相互作用的效果,计算效率高。因此选用控制体积法进行本文描述的尖端生长气囊前进时的仿真,在概念设计阶段为设计及实验提供参考。
选用Belytschko-Tsay薄膜单元算法,适合织物大变形分析的fabric气囊材料模型。气囊数值模拟分析中接触问题主要集中在气囊折叠展开这一部分上,折叠后气囊的面与面之间会产生重叠,展开时需要处理其相互之间的接触。罚函数法已发展为一种常用的接触界面算法,在数值计算中广泛应用。展开时的接触算法选择气囊单面接触。通过设置黏性阻尼系数,降低气囊展开速度,用以减小由于气体充入气囊时强大的动能引起的过大变形[12],设置从面罚刚度比例因子,防止柔软的囊体材料展开过程中发生穿透。当气囊与外界环境接触时,材料刚度差距较大,选择基于段的罚函数接触算法获得更好的稳定性。
为验证气囊尖端外翻生长、通过障碍、主被动转向的能力,建立含4个小气室平铺且内部含尚未展开平铺折叠状态的如图4所示气囊模型,进行充气及前进过程的动力学仿真分析。气囊外部长5200 mm,内部未展开气囊长度为4200 mm,单个小气囊平铺宽度为400 mm。

图4 气囊有限元仿真模型Fig.4 Finite element simulation model of the airbag
4 仿真结果及分析
通过给主气室和4个小气室不同的充气速率,验证尖端外翻生长气囊设计及完成越障、转向等任务的可行性并研究充气速率对行进过程的影响。尖端生长气囊行进时的状态及剖视图如图5所示,所设计气囊布局能按照设计思路实现前进。

图5 尖端外翻生长气囊生长过程示意图Fig.5 The growth process of the tip valgus airbag
在气囊前进方向前端放置迫使气囊改变方向的外部障碍,由图6可见,气囊在与挡板接触后,可自行改变前进方向。因此该尖端生长气囊在封闭管道内部可在外界的位移约束下被动改变方向。
图6 软体被动改变方向Fig.6 Airbag passively changes direction
在气囊前行方向放置两个间距为气囊直径三分之一的刚性挡板,验证气囊在狭小缝隙中前进的能力。图7显示气囊也具有改变自身截面形状的柔性,能顺利通行,所设计的气囊具有穿越废墟瓦砾、门窗缝隙实现前进的能力。

图7 软体通过缝隙的仿真结果Fig.7 Simulation results of airbag passing through the gap
通过改变各气室充气气体质量、流量,研究充气速率对腔体生长速度、膜面压力的影响,以及气室不同步充气对腔体行进方向的影响。首先进行三组仿真,研究小气室充气速率对行进的影响。主气室充气速率相同均为V,改变小气室充气个数与充气速率进行对比,仿真1:4个小气室充气速率V/10;仿真2:4个小气室充气速率V/5;仿真3:只有一个小气室充气,充气速率为V/10。所充入的混合气体摩尔质量为0.0225 kg/mol,速率V对应的气体质量流量为0.005 kg/ms。
继而进行两种仿真,研究主气室充气速率对气囊行进的影响。4个小气室充气速率均为V/10,分别改变主气室充气速率,仿真4主气室2V;仿真5主气室V/2。
仅对主气室和某一方向上的控制气室的仿真3结果如图8所示,气囊会有三维空间内的偏转,四周小气室差动充气,会对气囊行进方向起控制作用。

图8 方向控制气室作用效果图Fig.8 The effect diagram of directional control chamber
取气囊展开后顶端某点,研究充气速率对该点行进速度的影响,结果如图9所示。
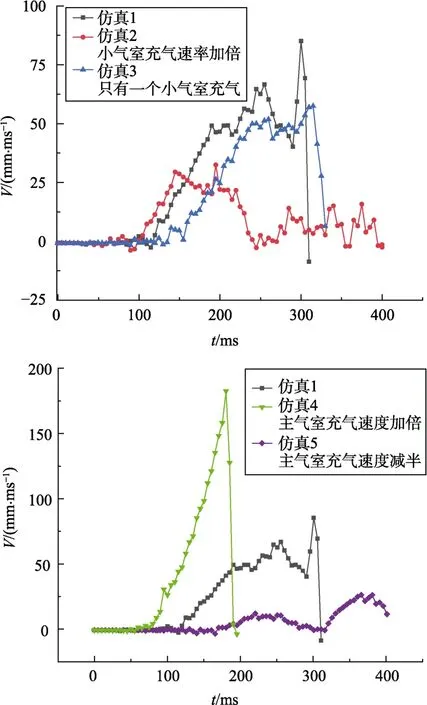
图9 生长过程气囊某点速度曲线Fig.9 Airbag velocity curve during growth
仿真3速度曲线表明只有单一气室充气,对加速度影响不大,因为需要将平铺的气囊充满气之后气囊才会前进,所以开始前行时刻略有延迟。另外,由于控制体积法气囊内部压强一致,体现不出气体流动,外部及内部未展开气囊也会同时充气膨胀,因此仿真2增加小气室充气速率或仿真5降低主气室充气速率,会导致内部与外部小气囊膨胀过快,留给未展开气囊空间变小,腔体整体伸长困难。在实际方案设计中,需要关注中间直行腔室和周边方向控制腔室的充气速率匹配问题。
时间在0~100 ms气囊处于充气阶段,当主气室蓄气充足后,气体压力将驱动内埋气囊前行。100 ms后可见主气室充气速率对气囊行进速率的影响。由速度大小及曲线斜率可得,气囊行进速度、加速度主要由主气室充气速率决定,成正相关。
取图10所示小气室内外表面两个单元查看所受压力,结果如图11所示,在本文算例充气速率关系下,气囊外侧材料所受压力大于气囊内侧。仿真1、3、4初始阶段为气囊逐渐蓄气,展开初期所受压力急剧增大,而后保持不变,气囊在此期间顺畅地加速向前生长直至完全展开。仿真2、5因为主气室与小气室充气速率之比减小,生长阻塞,所受压力持续增大,生长缓慢。气囊内侧由于与还未展开的气囊接触,压力波动较大。

图10 内外两单元所受压力Fig.10 The pressure of inner and outer surface
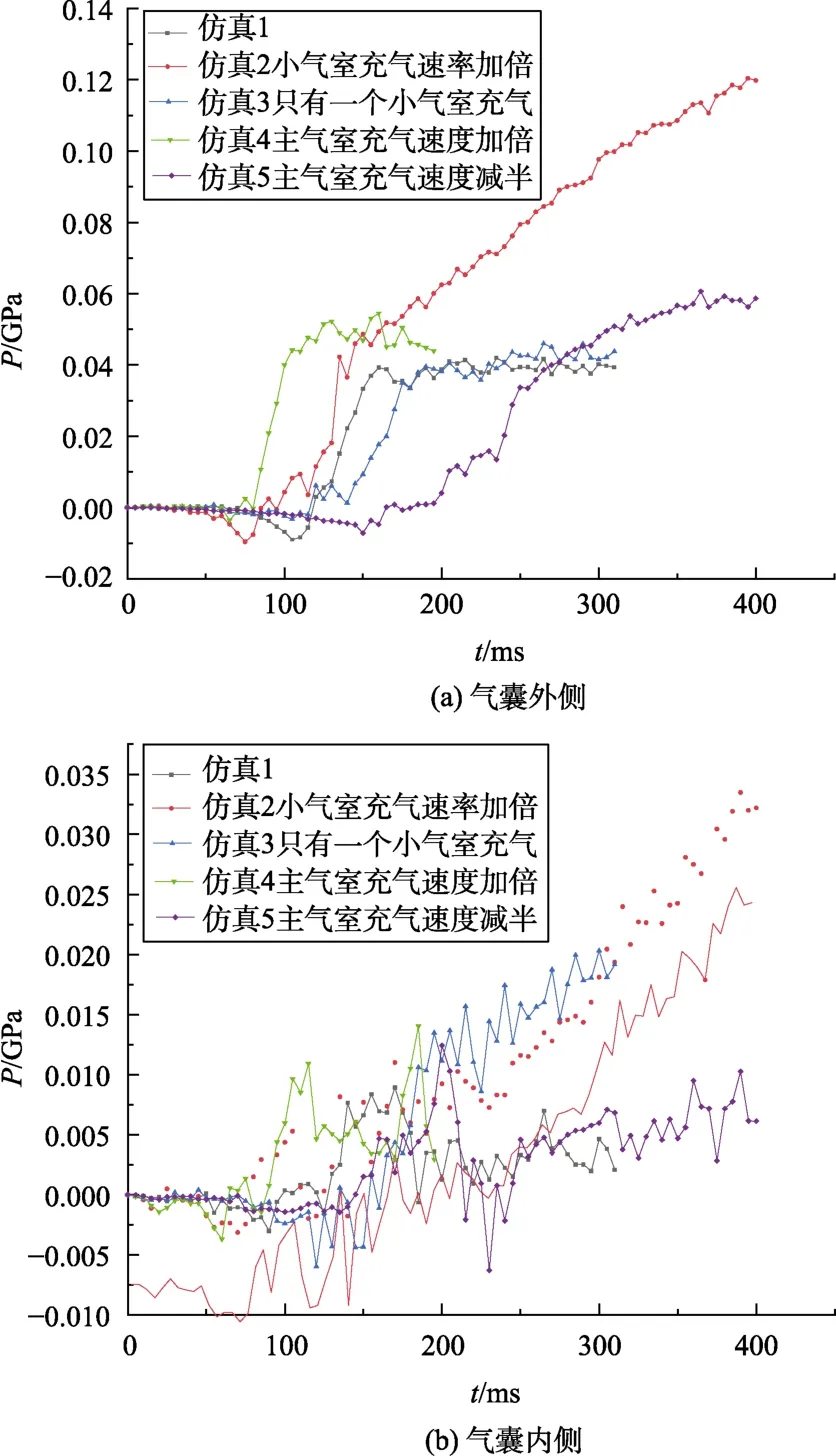
图11 气囊内外表面压力曲线Fig.11 Pressure curve of inner and outer surface of airbag
5 柔性充气式侦察平台实验
为验证运动机理,本文对基于相同基本原理的充气装置进行结构设计并对其运动能力进行实验验证。装置包括本体与压力囊体两部分,其中本体主要零件由PLA材料通过3D打印制成,包括外壳、囊体导向与回卷装置、保持架和囊体夹持装置。压力囊体由4条宽80 mm,双层厚度0.1 mm的PVC膜管热合制成,其一端固定于回卷装置的轮轴处,另一端则通过夹持装置固定于本体末端。工作时,其外翻部分形成直行腔室,四周小气室则作为方向控制腔室,通过蓄气实现对生长方向的调整。其结构示意图如图12所示。

图12 柔性充气无人系统详细构成示意图Fig.12 Detailed composition diagram of flexible inflatable unmanned system
针对该系统运动机能的实验主要分为直行与转向两部分。实验场地为塑胶平地,驱动气压通过压力可调的空气压缩机提供。直行实验主要分析压力对软体生长速度的影响,本系统直行效果如图13所示,转向实验则分别对基于方向控制腔室的主动转向与依靠刚性障碍的被动转向,其实验效果如图14所示。总体而言,所设计的柔性充气无人系统能够实现预期的运动机能,虽然在本文的实验中尚未搭载对应的尖端载荷与方向控制腔室内的辅助转向机构,实验结果仍展现了其独特的地形适应能力与较大的实用潜力,可为后续机型的研发提供参考。

图13 直行实验效果示意图Fig.13 Airbag straight ahead experiment
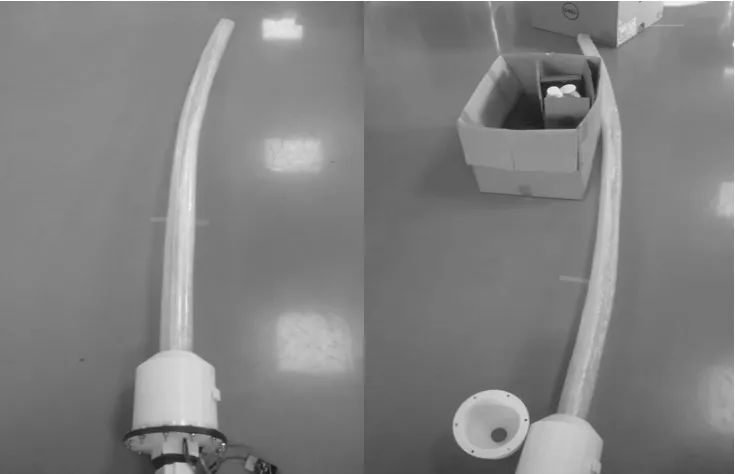
图14 转向实验效果示意图Fig.14 Airbag steering experiment
6 结 论
城市作战是未来战争的焦点,克服建筑物、地下空间、废墟带来的侦查通信困难,获取信息优势实现精确打击是取胜的基础和关键。首先进行了能主被动改变方向的、尖端生长柔性充气式无人侦察移动平台的概念设计,并对气囊充气前行这一运动过程进行了运动学仿真分析,证明了其在前行、穿越缝隙、改变方向等方面具有可行性,通过4个气室的差动充气可实现主动控制气囊方向。主气室与4个转弯执行气室的充气速率匹配会对行进过程产生影响,可为后续的实验研究提供参考。在本文主气室与小气室充气速率的关系下,小气室外侧膜面所受压力大于内侧膜面压力,可作为软体设计气囊材料选择的依据。亦可期待将尖端自生长软体移动平台应用于未来城市作战,通过门窗缝隙、通风管道、地下排污口等狭窄通道,实现对建筑内部隐藏和遮蔽目标的侦察、监视与打击引导,提高城市战场态势感知能力和作战效能。