引领式空中汉字展示无人机集群的仿真研究
2021-07-15贾宜霖
贾宜霖,岳 训
(山东农业大学信息科学与工程学院,泰安 271018)
1 引 言
无人机集群(Unmanned Aerial Vehicles,UAV)以单平台和信息协同交互体系为支撑,根据外部加载任务需求和感知环境,自主进行编队形成(聚合)和协同任务分配(解体)[1]。近年来,随着新兴数字化信息技术(智能芯片、物联网、大数据、云计算和人工智能等领域)之间的深度融合,无人机装备相关的平台技术、传感器技术、指挥控制技术等均有较大进展,各种新型结构设计和动力储能技术的进步极大地提高了无人机效率[2-3]。众所周知,无人机集群之间控制命令和数据传输的通信技术,决定无人机自身的感知定位与无人机集群之间协同信息通信可靠性。目前大规模、远航程的无人机集群编队普遍采用惯性导航、卫星导航、多普勒导航、地形辅助导航以及地磁导航等技术进行编队协同导航定位;短距离的集群编队多采用基于Wi-Fi 传感器技术。由于无人机嵌入式微处理器性能、通信带宽和通信时延的技术缺陷,目前实际应用领域的无人机集群存在通信资源限制造成的集群规模受限瓶颈[4]。
新一代5G移动通信技术具有超高速率(峰值速率大于每秒20 GB,相当于4G的20倍)、低时延(网络时延从4G的50 ms缩减到1 ms)和低功耗等特点[5],为解决目前无人机系统大规模应用的集群规模受限问题带来技术突破机遇。一方面,5G技术能最大限度为无人机集群提供高速率的智能化数据传输服务和超可靠的低延迟通信;另一方面,5G技术通过云服务的接口和工具访问并管理第三方的基础设施服务,可实现集群编队智能服务,保障了大规模集群节点之间的近实时信息交换能力[6-7]。无人机集群编队控制技术与新一代5G移动通信技术融合分为以下三个范式[8-10]:
(1) UAV可以智能地定位为飞行基站、中继站或定位锚,满足5G系统中无人机集群动态和不断增长的数据需求。
(2) 空中飞行的UAV通过访问5G无线网络地面基础设施,实现UAV集群之间通信。
(3) 无人机集群彼此之间与地面用户共享蜂窝频谱直接通信。
目前,视觉锐化、极致体验、云端一体、现场增强的新一代传媒娱乐,将是民用商业市场创业和投资的焦点(如图1)。本文面向低空空域(500 m以内)飞行需求,借助无人机集群与5G无线网络的结合潜力,在信号强度和覆盖范围上可保证有限通信信道带宽内连续交换信息的理想状态。探析引领式空中汉字展示无人机集群编队形成(聚合)和协同任务分配(解体)的全局系统演化过程,实现256单元的引领式16 × 16点阵空中汉字的动态展示无人机集群仿真。

图1 2020年6月15日晚,第127届广交会500架无人机编队展示图案Fig.1 Air display of 500 UAVs in 2020.6.15
2 引领式空中汉字展示无人机集群编队控制模型
如何将具有自主能力的256无人机单元在空间形成特定的16 × 16点阵层次正方块稳定队形,同时又能根据外部情况和任务需求实时进行队形动态调整,是引领式空中汉字展示无人机集群编队控制设计中的关键性问题。目前无人机集群编队飞行队形控制技术有虚拟结构法、人工势场法、领导–跟随法、基于行为法和一致性等编队控制方法[11]。其中,以领导–跟随法为代表的引领式无人机集群系统,凭借成熟的集群控制算法、通信网络设计、编队控制技术已广泛应用[12]。引领式无人机集群编队将首先对集群编队拓扑网络队形进行层级划分,然后在集群编队拓扑网络中选择领导者;通过领导者与跟随者之间的信号反馈,获得领导者与跟随者之间的距离和相对方位信息,对队形进行建模并定义保持编队行为控制策略。但是,由于引领式智能体集群控制通常采用微分方程动力系统稳定性分析的集群控制策略,面对智能体集群规模和复杂多变的智能体集群外部环境,迫切需要由简单规则生成复杂行为的智能体集群通用模型控制策略。
2.1 引领式空中汉字展示无人机集群编队聚合和解体的全局系统演化
2.1.1 引领式空中汉字展示无人机集群空间组织的拓扑结构有序性
引领式空中汉字展示无人机集群在内部纵向维度,遵循分层、分类、分节的层级引领式拓扑交互结构。每个层次的无人机单元可以有自己独特的概念、特征和法则。
2.1.2 引领式空中汉字展示无人机集群内部控制信息流动的有序性
在引领式空中汉字展示无人机集群内部层级引领式拓扑交互结构,存在两种集群控制信息流动路径或运动方式。一是“自上而下”的正态路径信息,解释为高层级引领式的中心节点,通过个体感知作业环境以及外部任务载荷指挥控制平台,“自上而下”地整体约束、驱动底层无人机的拓扑结构,决定引领式空中汉字展示无人机集群外在表现的聚集过程。二是“自下而上”的逆态路径信息,意为在具有多模态感知功能的单个无人机感知周围态势环境后,将“自下而上”反馈到引领式空中汉字展示无人机集群相邻的上层结构无人机单元。
2.1.3 引领式空中汉字展示无人机集群经历编队形成(聚合)和任务分配(解体)的全局系统演化周期
引领式空中汉字展示无人机集群内部“自上而下”的正态和“自下而上”逆态流动之间的动态平衡和有序博弈,是一个相互依存、互为根基的辩证关系。一是“自上而下”正态和“自下而上”逆态双向调控是具有主导结构、不平衡的对立统一体,即对立双方的地位是不均等的,其中必有一方占据主导地位,另一方处于从属地位。二是双方在一定条件下相互转化,经过双方的平衡态,主导地位可以转化成从属地位,从属地位在一定条件下亦有可能占据主导地位。三是正态和逆态两种调控方向的有序博弈,驱动着引领式空中汉字展示无人机集群控制信息流动时序态势的演化顺序和规则,决定了无人机集群协同行为和集群稳定性。
引领式空中汉字展示无人机集群经历编队形成(聚合)、集群编队优化(调整优化)和集群编队解体(任务分配)的有界时空演化周期详细阐述如下。
阶段1:无人机集群编队形成(聚合)
【引领式空中汉字展示无人机集群的初始态】:一定规模、松散的单个自主无人机存在于可控范围的有界时间和空间中。
【正态路径信息开始增益,无逆态路径信息】:处于主导地位的中心节点无人机,通过个体感知作业环境以及外部任务载荷指挥控制平台,采用基于数据链的信息共享全局式信息交互,逐步分批“自上而下”地整体约束、驱动下层无人机,开始引领式空中汉字展示无人机集群层级引领式拓扑交互结构的聚集动态配置。
【正态路径信息增长到极大数,无逆态路径信息】:集群控制的“自上而下”正态路径信息增长达到极值,引领式空中汉字展示无人机集群聚合过程按照一定层级引领式拓扑交互结构形式,形成二维/三维空间特定排列的集群系统编队。
阶段2:无人机集群编队优化(调整优化)
【正态路径信息保持极大数,逆态路径信息开始从极小值逐步增益】:具有多模态感知功能的下层无人机,感知周围态势环境的变化,集群系统内部集群控制的“自下而上”的逆态路径信息传递反馈开始增强。
【逆态路径信息与正态路径信息达到平衡】:集群控制“自上而下”的正态路径信息流动方式开始减弱。集群系统编队进行队形动态调整。集群内部“自上而下”正态与“自下而上”的逆态路径信息流动方式达到平衡,维持集群系统编队相对稳定的平衡。
阶段3:无人机集群编队解体(任务分配)
【正态路径信息保持,逆态路径信息逐步增益】:集群内部“自下而上”逆态路径传递反馈信息流动方式占据主流。
【正态路径信息消弱到极小值,逆态路径信息逐步增益到极大值】:引领式空中汉字展示无人机集群编队依据多目标分组、分配,引领式空中汉字展示无人机集群从底向上,在引领式空中汉字展示无人机集群层级引领式拓扑交互结构,逐层解体开始,任务分配每个(层)智能体都有自己的任务或者子目标。
2.2 引领式空中汉字展示无人机集群编队的双向控制信息控制模式
从整体系统演化角度,引领式空中汉字展示无人机集群编队呈现出来的空间性、组织结构稳定性和有序性取决于如下关键要素。
2.2.1 引领式空中汉字展示无人机集群具备的N×N点阵层级结构
图2(a)为16个无人机单元的4 × 4点阵层次正方块引领式集群结构。根据各无人机单元在队形中位置差异,依照层级划分规则,对集群进行编队层级划分。其中,第16无人机单元指定为当前队形的顶层中心引领单元,沿通信链路向下,依照相邻关系和标号依次递减原则确定引领关系。
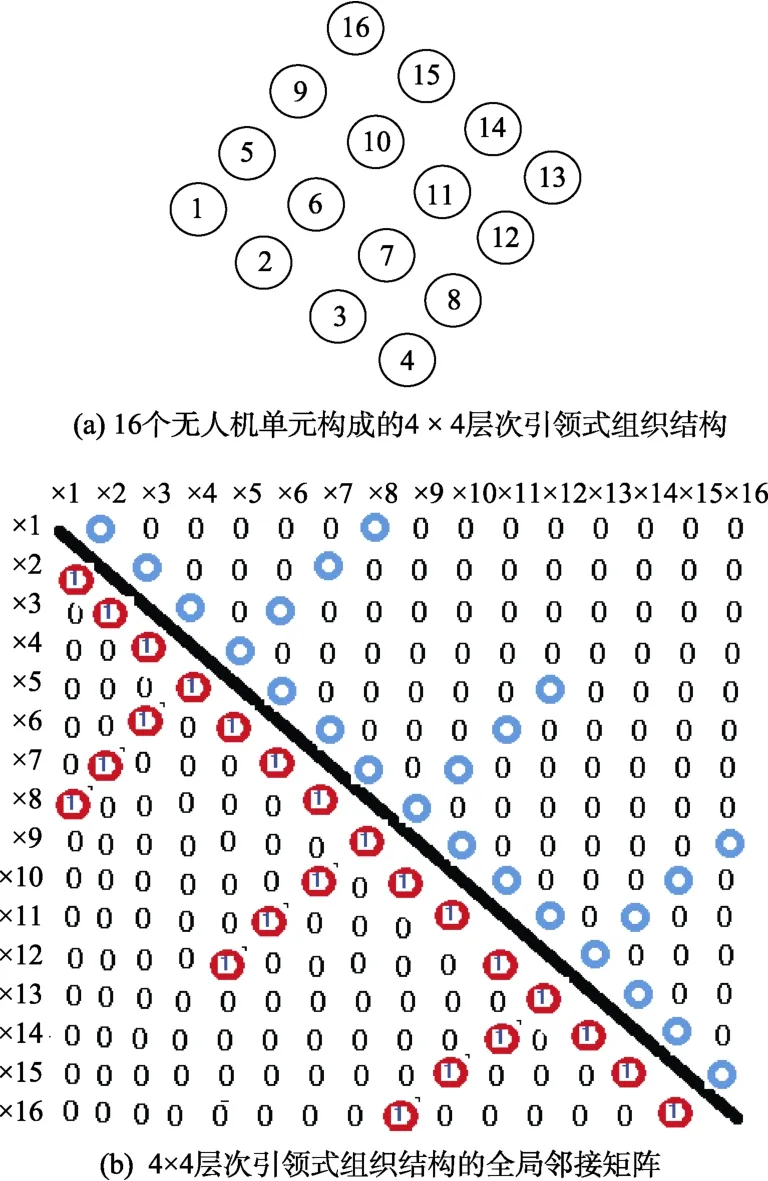
图2 16个无人机单元构成的4×4层次引领式组织结构和全局邻接矩阵Fig.2 The 4 × 4 leader–follower structure and adjacency matrix of 16 UAVs
2.2.2 基于双向控制信息的引领式空中汉字展示无人机集群控制信息流动全局时序态势
在信号强度和覆盖范围上可保证有限通信信道带宽内连续交换信息的理想状态,引领式无人机单元在层级引领式垂直整合下的内部组织结构之间,体现在系统内部层级引领式组织结构“自上而下”和“自下而上”的路径的信息流动正反馈和负反馈:
正态路径信息:引领式空中汉字展示无人机集群上层无人机单元,“自上而下”地整体约束、驱动下层无人机单元。
逆态路径信息:单个自主无人机单元将被周围态势环境的突显目标“刺激”,“自下而上”反馈到引领式空中汉字展示无人机集群相邻的上层结构无人机单元。
基于双向控制信息的引领式空中汉字展示无人机集群控制信息流动全局时序态势可用如下全局邻接矩阵描述:

式(1)表示引领式空中汉字展示无人机集群的单元数目。其中:

v= (v1,v2, … ,vN)引领式空中汉字展示无人机集群中无人机单元点集合;ω(i,k)表示引领式层级垂直整合下相邻智能体之间信号传输,(i,k)∈v。
“自上而下”和“自下而上”的正态、逆态两种信息路径在引领式空中汉字展示无人机集群纵向层级结构的流动状态细化为2个状态:
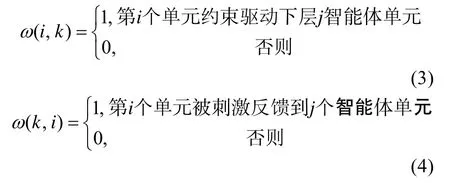
图2(b)为16个无人机单元的4 × 4点阵层次正方块引领式集群结构全局邻接矩阵。
如图3所示,以4个无人机单元(x1、x2、x3、x4)的一字长蛇阵引领式集群结构为例,按标号依次递减。“自上而下”和“自下而上”两种集群控制信息,将呈现3个级别的流动状(1~2层、2~3层和3~4层)。引领式空中汉字展示无人机集群编队形成(聚合)、能体集群编队优化(调整优化)和能体集群编队解体(任务分配)时序态势的全局系统演化法则如图3所示。
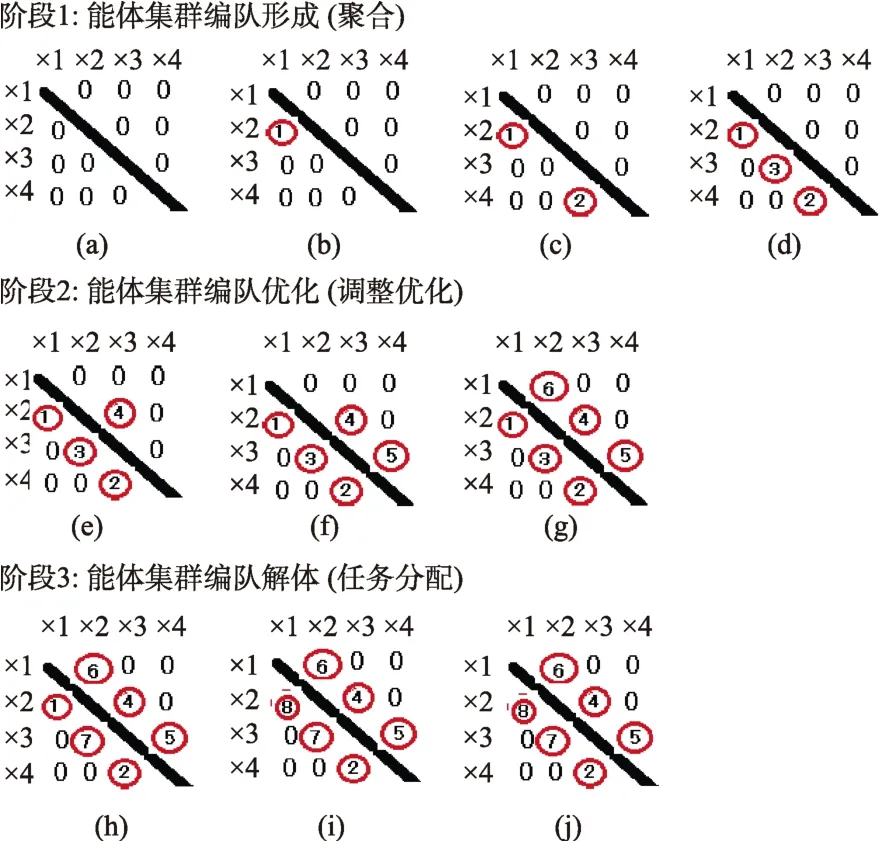
图3 一字长蛇阵引领式4单元集群编队形成和任务分配逐步演化规则(a)-(j)Fig.3 Global system evolution rules of the 4 leader–follower horizontal formation control and dynamic task assignment (a-j)
3 引领式空中汉字展示无人机集群编队仿真及算法时效性分析
3.1 256架无人机单元的16 × 16正方块集群编队
引领式空中汉字展示无人机集群采用HZK16汉字16 × 16点阵空中汉字字符展示方案,HZK16字库里的16 × 16汉字一共需要256个点来显示,需要256架无人机空中编队组成各种字幕和图案。本文在实现无人机集群编队目标位置分配、路径规划、避撞要求、姿态轨迹跟踪控制等技术基础上[13],设计了无人机集群编队聚合和解体的全局系统演化以及双向控制信息控制模式,在MATLAB环境下实现了256单元的引领式16 × 16点阵空中汉字的动态展示无人机集群虚拟仿真。
假设在一定时间区间内,引领式空中汉字展示无人机集群初始位置随机分布,通过引领式集群编队的基于双向控制信息演化控制机制,队形变换至256无人机单元的16 × 16点阵层次正方块引领式集群队形,如图4(a)~(c)所示。
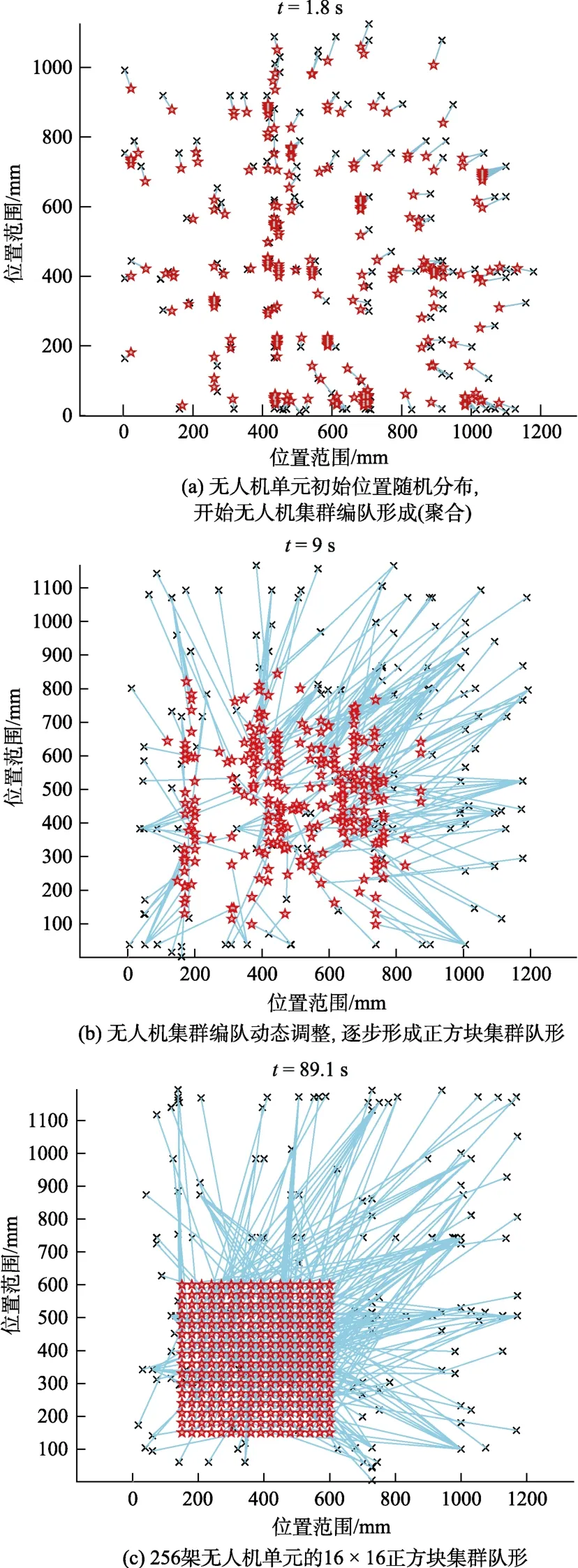
图4 256架无人机单元的16 × 16正方块集群队形的切换轨迹图Fig.4 Trajectory of 16 × 16 cluster formation of 256 UAVs
3.2 16 × 16的FED点阵汉字字幕和图案展示
16 × 16点阵显示汉字点阵地址段以十六进制的方式,预存在静态数组当中方便调用。如图5所示,通过控制无人机的外显光源即可得到所需的FED点阵汉字字幕和图案展示。
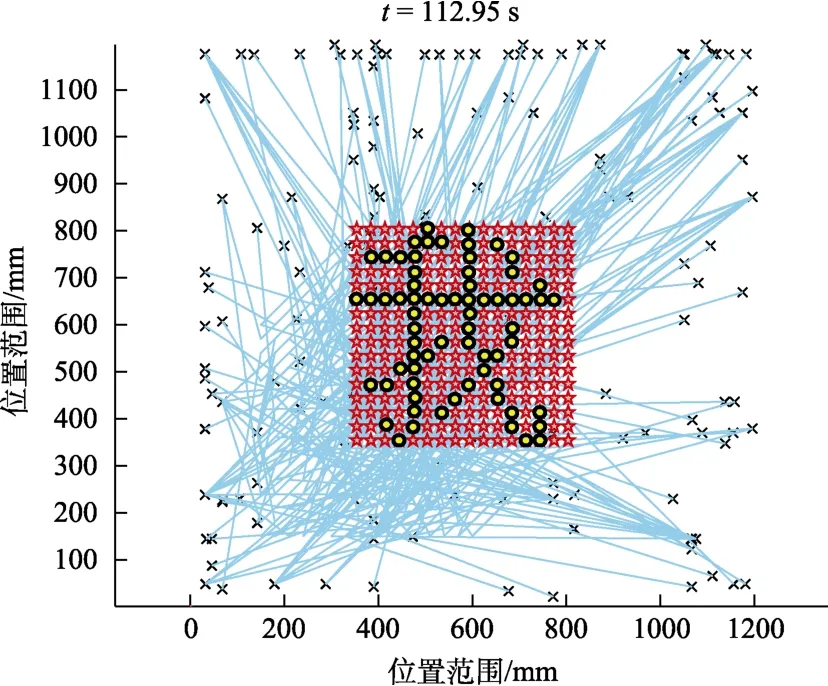
图5 256单元的引领式无人机集群空中16 × 16点阵空中汉字Fig.5 16 × 16 air dot-matrix Chinese-character display of 256 leader–follower UAVs
3.3 时效性分析
为了验证引领式空中汉字展示无人机集群编队虚拟仿真算法的时效性,本文在确定虚拟仿真实验的相关参数(运行速度等)的前提下,主要从集群编队的规模、集群编队初始目标位置分配范围,验证所建模型的合理性和稳定性。
如图6所示,集群编队的规模采用16个无人机单元的4 × 4点阵层次正方块引领式集群编队聚合和解体过程为例,假设在一定时间区间内,集群初始位置随机分布,聚合为一字长蛇阵引领式集群的队形如图6(a)所示,然后,针对3个突显目标,根据外部情况和任务需求进行队形动态调整为3个小队形如图6(b)所示;任务完成后,编队任务再次发生改变,集群期望队形变换至16个无人机单元的4 × 4层次正方块引领式集群队形,如图6(c)所示,针对2个突显目标,根据外部情况和任务需求进行队形动态调整为3个小2 × 2小方块队形,集群解体,如图6(d)所示,16个无人机单元用x1、x2、x3、x4、x5、x6、x7、x8、x9、x10、x11、x12、x13、x14、x15、x16表示,x17、x18、x19代表周围态势环境的“刺激”突显目标。
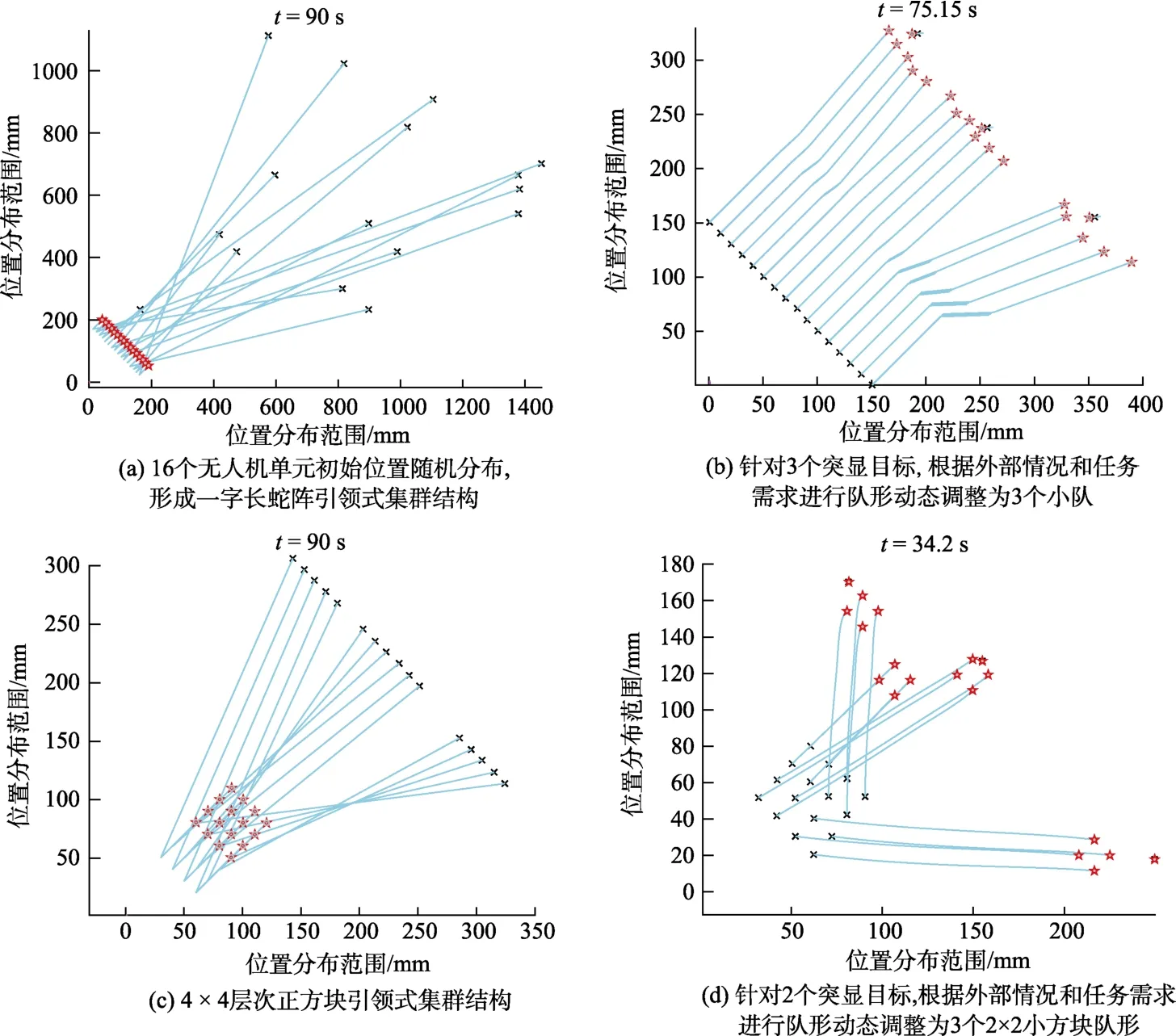
图6 16个无人机单元的4 × 4点阵层次正方块引领式集群编队聚合和解体过程的切换轨迹图Fig.6 Trajectory of the aggregation and dissolution for 4 × 4 cluster formation of 16 leader–follower UAVs
再以16个无人机单元的4 × 4点阵层次正方块引领式集群结构和256个无人机单元的16 × 16点阵层次正方块引领式集群队形为对比,两种集群编队初始目标位置分配范围从[200,200]到[1600, 1600]变化,验证算法的合理性和时效性。如图7所示,本文算法的时效满足无人机集群的空中汉字展示的规划需求。但是,仿真结果显示,初始目标位置分配范围越大,相应的算法收敛时间越长。且无人机数量较少时,时效性较高,故无人机的数量对模型算法的时效性影响较大,因而需要选取合理方案。

图7 16单元和256单元集群编队的时效差异Fig.7 Time effect for leader–follower formation structure between 16 UAVs and 256 UAVs
4 结 论
随着数字5G通信基础设施建设和产业应用场景的拓展,5G无线网络将满足无人机集群为核心的计算基础服务体系,应用于各产业和行业领域的智能经济应用场景[14-15]。本文工作在保证有限的通信信道带宽内连续交换信息的理想状态上,主要工作如下:
(1)针对目前引领式智能体集群编队控制主流研究都是基于传统优化方法的微分方程动力系统稳定性分析控制方案,体现出不适于大规模集群的局限性。本文从整体的、系统演化角度,将无人机智能体集群内部要素(智能体或子系统)、与其相关联的外部环境要素,组合成一个由外部环境和内部机制的具有整体多层次嵌套结构、多元维度调控联合驱动、全局系统演化的自适应复杂系统,提出了引领式空中汉字展示无人机集群编队形成(聚合)和协同任务分配(解体)的全局系统演化认知框架。
(2)从引领式空中汉字展示无人机集群具备的垂直整合下的动态层级结构、集群层级结构存在“自上而下”和“自下而上”内部协同信息流动路径或方式的有序性等要素入手,着重解析了无人机集群编队的控制信息流动时序态势演化周期机制。
(3)给出一种全局邻接矩阵形式化定义,描述基于双向控制信息的引领式空中汉字展示无人机集群控制信息流动全局时序态势。
(4)在MATLAB环境下实现了空中汉字展示的无人机集群虚拟仿真实验,验证了方案的有效性。