“天鹰”系列运载器助力火星探测降落伞高空开伞技术验证
2021-07-15陈华兵尹力恒
陈华兵,杨 军,尹力恒
(中国航天科技集团有限公司四院四十一所 燃烧、流动和热结构国家级重点实验室,西安 710025)
火星探测器在实施火星着陆过程中有一段伞系减速段(见图1),需要在火星稀薄大气的条件下采用降落伞进行减速,在距火星表面约11 km的高度打开降落伞,将探测器速度由460 m/s减速到95 m/s左右[1]。这个过程中,能否成功实现高空开伞是关键一步。
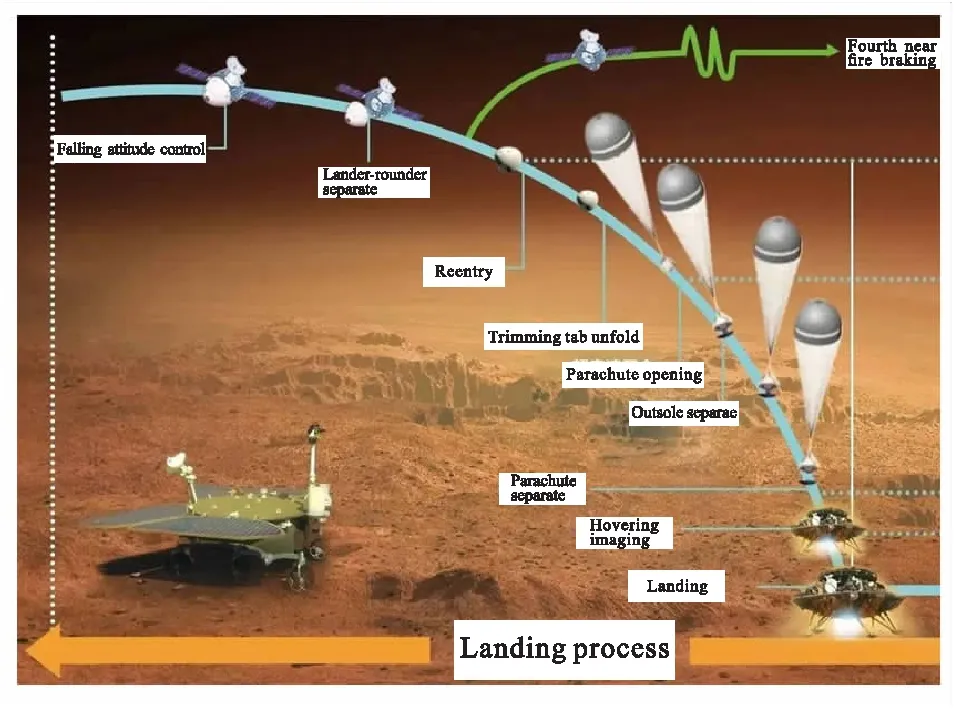
图1 火星探测器着陆过程示意图
由于在火星大气层开伞具有超音速、低动压、低密度的显著特点,要充分验证火星降落伞的开伞性能,就必须模拟探测器再入火星大气时的开伞弹道条件和探测器姿态控制条件来进行开伞试验[1]。为此,伞系减速系统负责单位中国航天科技集团有限公司五院508所提出了采用火箭作为载体的试验方案,并联合中国航天科技集团有限公司四院开展了“火星探测降落伞火箭高空开伞试验”方案论证与实施。该方案采用四院“天鹰”系列亚轨道运载器作为载体,将火星探测降落伞投送到几十公里的高空,并对开伞姿态进行精确控制,模拟火星开伞条件进行高空开伞试验[2],图2给出了火箭高空开伞验证试验的飞行示意图。
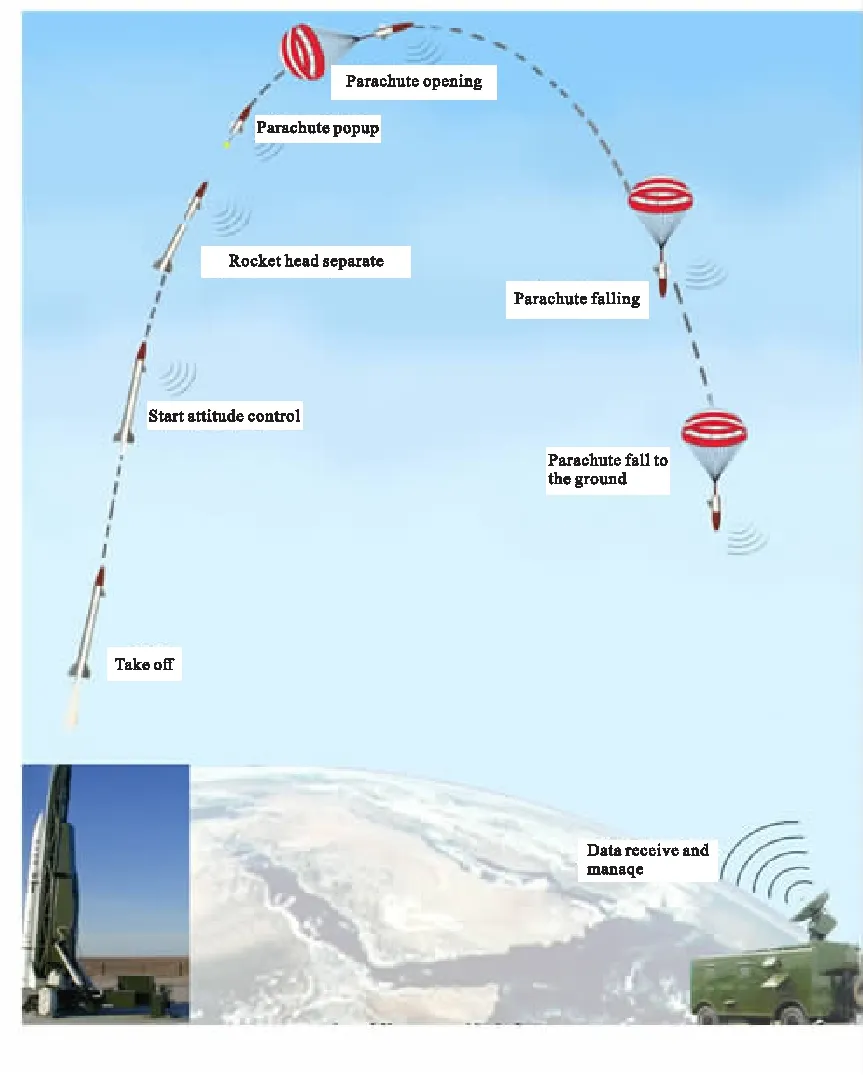
图2 高空开伞飞行试验示意图
高空开伞试验分缩比降落伞和全尺寸降落伞两阶段实施,试验运载器继承“天鹰”系列运载器模块化、通用化成熟技术,具有低成本、周期短、可靠性高等优点。第一阶段开展缩比降落伞高空开伞试验,选用四院XX-2型试验运载器(见图3),载荷舱直径φ398 mm,总长约6 m,起飞重量约1.1 t,采用固体姿控直接力与气动舵组合控制方式,实施弹道控制和高空姿态控制。运载器配备拉力、过载、温度等传感器和高清摄像头,通过记录仪和遥测装置实现关键数据的存储以及实时下传[3]。

图3 XX-2运载器
第二阶段为全尺寸降落伞开伞试验。由于降落伞尺寸、重量均超出了现有“天鹰”系列运载器的载荷量,为此四院新研了一款大型的试验运载器XX-6(见图4),载荷舱直径φ750 mm,起飞质量约为5 t,箭长约10 m。虽为新研,但其实仍是“天鹰”系列运载器成熟技术和产品的模块化组合,运载器气动外形保持不变(等比放大),控制系统、动力系统、遥测系统、分离系统等方案与XX-2基本一致,产品均选用现有模块化产品;姿控发动机选用三通道双组元液体姿控发动机,用于运载器发射段和高空低动压段控制[4]。

图4 XX-6运载器
1 试验运载器关键技术
火星探测高空开伞试验根据不同开伞试验条件分为四个工况,每个工况条件下对运载器的飞行弹道特性及开伞时运载器姿态均有不同要求,需要以一型运载器满足不同工况下的飞行试验要求;满足开伞试验条件的飞行窗口具有约束条件多、参数范围小、窗口时间短等特点[5],需要运载器在飞行过程中实时准确判断满足全部开伞条件的开伞时间点,可靠地在开伞窗口内发出开伞指令;开伞过程中的应力、过载、温度等参数以及整个开伞过程的状态监控是判断开伞试验成功的重要信息,必须进行可靠的采集和记录;运载器上的固体姿控发动机为四院自研的国内首例工程应用产品,需要开展充分的单机试验和系统匹配试验,确保产品可靠性、控制模型准确性和系统匹配性。
(1)运载器总体特性调节技术
为实现一型运载器满足不同开伞工况条件下飞行要求的目的,将运载器标称设计状态对应到开伞工况的中间工况状态,在运载器不同舱段设计有模块化的配重方案,可调整运载器起飞质量,同时将其他总体参数变化范围控制在允许范围内。在此基础上,采用配重和发射倾角组合的调节方式,实现运载器标准弹道的调节,使标准弹道满足开伞工况的理想状态。此外,配重方案可根据弹道需求在飞行试验前灵活选择,便于开伞试验的全工况验证。
(2)多约束飞行弹道窗口可靠进入技术
由于满足开伞试验的飞行弹道窗口约束条件多,为此,将约束条件分为快约束和慢约束两类进行针对性的设计。快约束如姿态角、角速度等条件采用精确控制方法在开伞预判段进行持续控制,直至开伞指令发出;慢约束如位置、速度等条件采用参数方程与逻辑判断组合的方式进行在线实时判断,保证在各种偏差条件下以最大概率进入开伞弹道窗口[6-7]。
(3)大气层内静不稳定体侧喷流直接力控制技术
降落伞高空开伞时安装于运载器箭头内,箭头模拟开伞时火星探测器的姿态。箭头大气层内姿态的精确控制具有气动喷流扰动影响明显、静不稳定力矩干扰大、箭头质心范围变化大等特点,设计时通过对姿控力和力臂的匹配进行迭代优化,达到全控制过程中的指标最优匹配,同时采用自适应前馈补偿动态脉冲调宽控制算法,削弱静不稳定力矩干扰,提高姿控力利用效率。地面悬吊试验(见图5)和飞行试验表明,箭头姿控精度优于0.1°。

图5 直接力控制地面悬吊试验
(4)高动态参数测量与实时传输技术
火星降落伞开伞动态时间短、过载大的特点,对参数测量和过程录像提出较高要求。测量系统选用高采样率拉力、过载、温度传感器和高清高帧频广角摄像头,确保开伞过程参数和图像可靠采集;通过箭上记录仪记录存储与宽频遥测实时下传的冗余方式确保数据可靠存储。
(5)新型固体姿控发动机技术
固体姿控发动机相比于液体姿控发动机具有成本低、安全性好、使用维护方便等优点。新型固体姿控发动机采用旋转阀流量控制方式,通过电机带动阀门作动实现固体燃气在相对喷管间的切换,从而产生不同喷管的姿控力,姿控力响应时间可达10 ms以内,达到国内一流水平。
2 试验运载器研制情况及应用
由于较好地继承了天鹰系列产品模块化、通用化的优点,XX-2和XX-6型运载器均在不到一年时间内就完成了产品研制。
2016年8月29日,XX-2运载器缩比降落伞开伞试验成功首飞。图6为火箭发射、箭体反推、降落伞开伞的飞行试验图片。试验过程中,运载器先按飞行程序控制飞行弹道,将降落伞系统送至满足开伞条件的开伞窗口,并将姿态控制在需求开伞姿态,然后实施头体分离,将箭体用反推发动机推离箭头,为降落伞向箭头后方弹伞打开通道,随后降落伞弹出,缩比降落伞开伞飞行试验取得圆满成功。随后,缩比降落伞开伞试验又进行了4次飞行试验,均取得圆满成功。
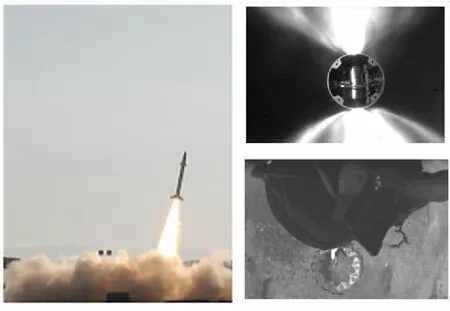
图6 缩比降落伞开伞飞行试验
2018年4月9日,XX-6运载器全尺寸降落伞开伞试验完成首飞(见图7)。试验过程中,运载器先采用液体姿控与气动舵对发射加速段箭体实施复合控制,在即将满足开伞条件时,运载器头体分离,随后降落伞弹出。全尺寸降落伞开伞连续4次飞行试验均圆满成功,有力促进了“天问一号”火星探测着陆减速关键技术的验证实施。
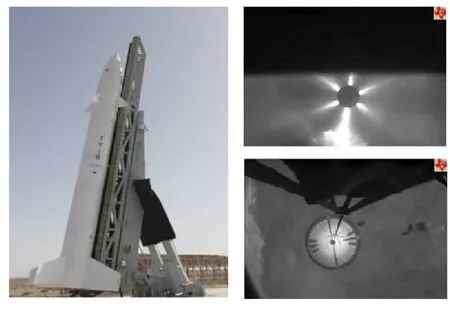
图7 全尺寸降落伞开伞飞行试验
3 展望
五院508所总工程师、回收着陆领域专家黄伟表示,这次“天问一号”成功落火,充分验证了火星降落伞的可靠性,我国未来的深空探测项目,比如火星取样返回以及未来的行星探测,都将应用这次火星降落伞的技术。图8为天鹰系列运载器型谱。
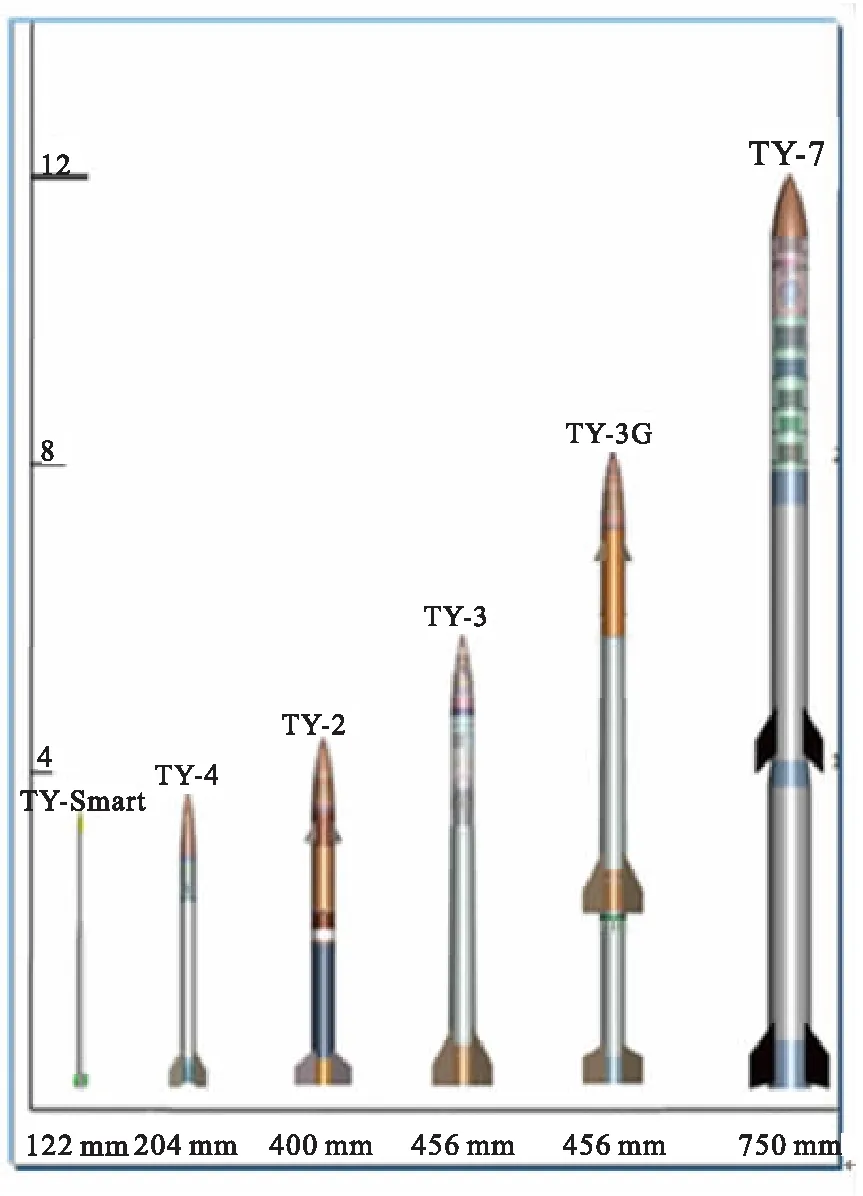
图8 天鹰系列运载器型谱
目前,四院正在开展后续其他高空开伞试验验证任务相关运载系统的研制。四院充分依托丰富的固体动力资源和产业链配套能力,以“模块化、通用化、系列化”为指导原则,在20余年的时间里逐步形成覆盖有效载荷1.5~500 kg,直径φ50~φ750 mm,飞行高度10~500 km的“天鹰”系列亚轨道运载产品(见图8),可用于气象探测、科学探测、空间微重力和空间物理实验等。目前,该系列运载系统已列入中国航天科技集团有限公司运载火箭系列型谱,并成功飞行70余发,保障了多项国家空间科学试验任务的顺利进行,达到了国内国际先进水平。
