一类差分方程退化不动点的定性性质
2021-07-14李明山周效良
李明山, 周效良
(1.南京航空航天大学 经济与管理学院,江苏 南京211106; 2.岭南师范学院 数学与统计学院,广东 湛江524048)
近年来,差分方程理论与应用研究取得许多成果[1-4].目前关于二维差分方程具有特征值±1的退化不动点的定性性质研究成果较少.文献[5]利用Picard迭代[6]、去奇化理论[7]、共轭关系[8]和Takens定理[9]研究了一类离散竞争模型退化不动点的定性性质.文献[1]提出了一类离散经济模型


映射(2)在不动点E0(0,0)处的特征值为 λ1=1,λ2=-1.本文考虑映射(2)在退化不动点E0附近的定性性质.
本文利用Picard迭代和Takens定理得到了映射(2)在退化不动点E0的近似系统(也称为微分方程),通过极坐标变换来研究微分方程在退化平衡点附近的定性性质.进一步,利用blow-up方法和微分方程的时间-1映射的反射与映射(2)之间的共轭来研究映射(2)在退化不动点E0附近的定性性质.
1 流近似
利用Picard迭代和Takens定理将映射嵌入微分方程的流.利用微分方程来研究映射(2)在退化不动点E0处的定性性质,首先给出Takens定理.
引理1.1[9]假设

是一个在O附近的形式映射,S是半单的且具有特征值 ±1,N是幂零的,是k次齐次多项式,则在O附近存在唯一的不变向量场Y使得φ~Y(1,·),这里 φ~Y(t,·)表示~Y的形式流.对所有)仅依赖于j k(~H),其中j k是截断形式映射或者形式向量场在O处的k次项系数.
定理1.2在(0,0)的充分小邻域内,映射R◦满足

其中,w=(u,v),R=diag(1,-1),φ(t,w)满足初值φ(0,w)=w,并且是由如下平面微分方程生成的流
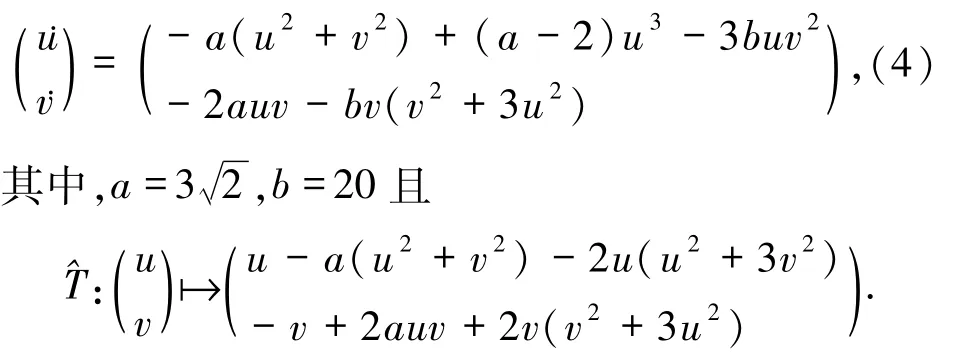
证明利用ϑ:x=u+v,y=u-v变换可将映射(2)对角化为T^,故有

由Takens定理,映射在E0附近可以嵌入连续流.考虑如下微分方程

其中Xk(u,v)∈Hk,

a ij、bij是待定的.设微分方程(6)有如下形式


接着比较(7)式和(8)式的三次项可得
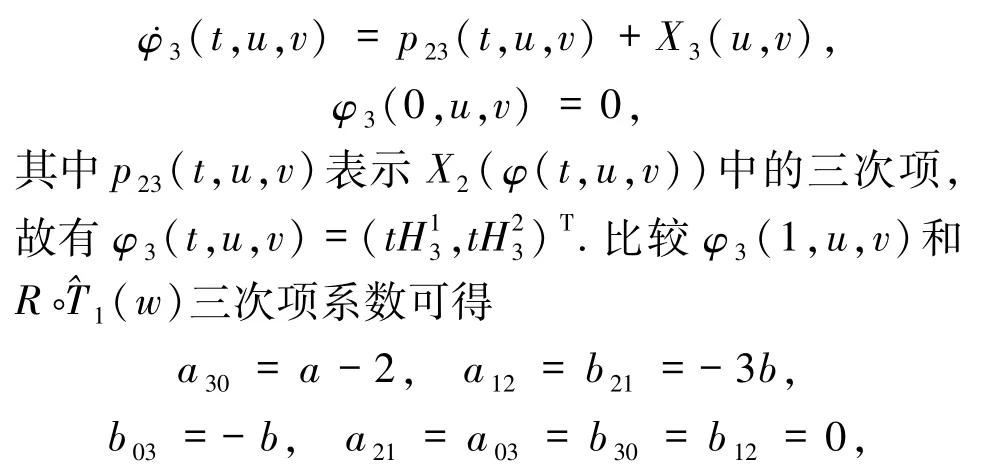
故映射R◦(w)的近似系统为微分方程(4).证毕.
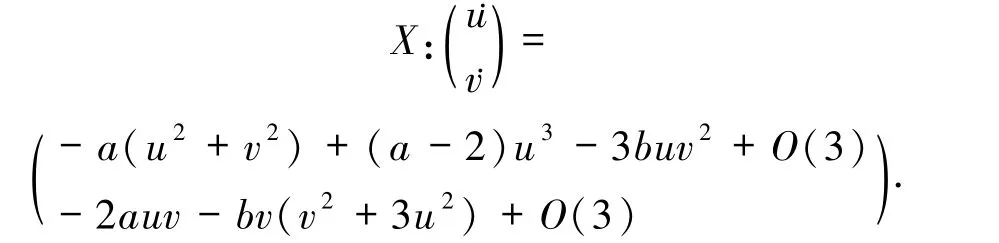
这样就得到如下向量场:
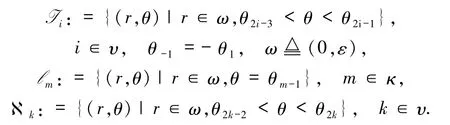
为方便行文,给出如下记号,其中אi、Ik(i,k∈υ)是以E0为中心的扇形邻域是充分小的正数,υ:= {1,2,3,4},κ:={j+1},且
定理1.3微分方程(4)的平衡点(0,0)是不稳定的.在E~0充分小邻域附近,在区域I1内,微分方程(4)的轨线沿着直线I1进入E~0,区域I1是一个吸引的扇形区域;在区域I2内,微分方程(4)的轨线沿着直线I2靠近平衡点E~0,并且沿着直线l4离开平衡点,区域I2是一个鞍点扇形区域;在区域I3内,微分方程(4)的轨线离开平衡点E~0,区域I3是一个排斥的扇形区域;在区域I4内,微分方程(4)的轨线沿着直线l8靠近平衡点E~0,并且沿着直线l5离开平衡点,此时区域I4是一个鞍点扇形区域.
证明为了明确微分方程(4)在原点附近的轨线走向,对其实施坐标变换x=rcosθ,y=rsinθ,得到如下系统


系统(10)在单位圆周{0}×S1上有奇点(0,θj),j=1,2,…,8.若r充分小,当 θ = θ0时,有 θ˙=0.此时r˙<0,所以在l1直线上(4)式的轨线是趋向于平衡点E~0.当 θ∈(- θ1,θ1)时,有r˙<0.所以在区域I1内,(4)式的轨线沿着直线I1进入平衡点E~0,此时区域I1是一个吸引的扇形区域.当θ∈(θ1,θ2)时,有r˙<0.当 θ∈(θ2,θ3)时,有r˙>0.所以在区域I2内,(4)式的轨线沿着直线I2靠近平衡点E~0,并且沿着直线l4离开平衡点,区域I2是一个鞍点扇形区域.当 θ= θ4,u<0时,此时r˙>0.所以在l4直线上(4)式的连续时间流是趋于-∞的,从而(4)式的平衡点E~0是不稳定的.当 θ∈(θ3,θ5)时,有r˙>0.所以在区域I1内(4)式的轨线离开平衡点,此时区域I3是一个排斥的扇形区域.
因为(4)式是v↦-v不变的,所以在区域I2内,(4)式的轨线沿着直线l6靠近平衡点E~0,并且沿着直线l6离开平衡点此时区域I4是一个鞍点扇形区域,故(4)式在平衡点附近的相图如图1所示.证毕.
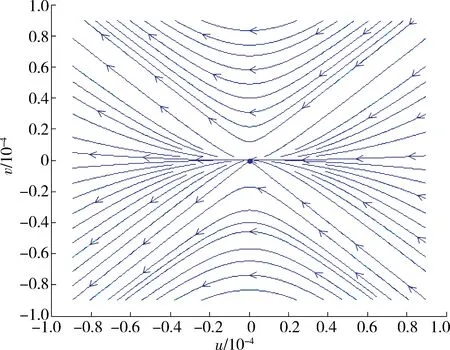
图1 (4)式在平衡点~E 0附近的相图Fig.1 Phase portrait of system(4)near equilibrium~E 0
2 退化不动点的定性性质与稳定性
下面应用blow-up方法来研究向量场X的平衡点的定性性质.应用映射(2)与向量场X之间的共轭关系,得到了映射(2)退化不动点E0的定性性质.
引理2.1[8]设H和Y分别是在原点O附近的C∞映射和C∞向量场,且它们的形式部分分别与引理1.1给出的形式映射~H和形式向量场~Y相同.假设向量场Y有一轨道沿着特定的方向连接O,向量场Y无椭圆扇形,且向量场Y是Lojasiewicz类型的.假设通过去奇化后得到的向量场仅有双曲平衡点,则存在C∞坐标变换Ψ满足j∞(Ψ-I)=0使得 Ψ-1◦H◦Ψ =S◦φY(1,·),其中I表示恒同变换.
若存在常数k、σ、η 使得对任意(x,y)∈R2,‖(x,y)‖k≤η,都有‖Y(x,y)‖≥σ ‖(x,y)‖k,则称C∞向量场是Lojasiewicz类型的,其中‖·‖表示R2中的Euclid范数.显然向量场X是Lojasiewicz类型的.
定理2.1映射(2)的退化不动点E0是不稳定的.在退化不动点E0的充分小邻域内,若初值Q(x0,y0)∈א1,则沿着直线l2两侧收敛于E0,א1是一个“吸引的扇形区域”;若初值Q(x0,y0)∈א2,则沿着直线l3靠近不动点E0,并且沿着直线l5离开不动点E0,区域א2是一个“鞍点扇形区域”;若初值Q(x0,y0)∈א3,则离开不动点E0,区域א3是一个“排斥的扇形区域”;若初值Q(x0,y0)∈א4,则沿着直线l1靠近不动点E0,并且沿着直线l7离开不动点E0,此时区域א4是“排斥的扇形区域”.
证明显然微分方程(4)与向量场X在原点O附近的定性性质是一样的.对向量场X应用变换u=w1,v=w1w2沿着v轴进行blow-up,将向量场X转化为如下系统
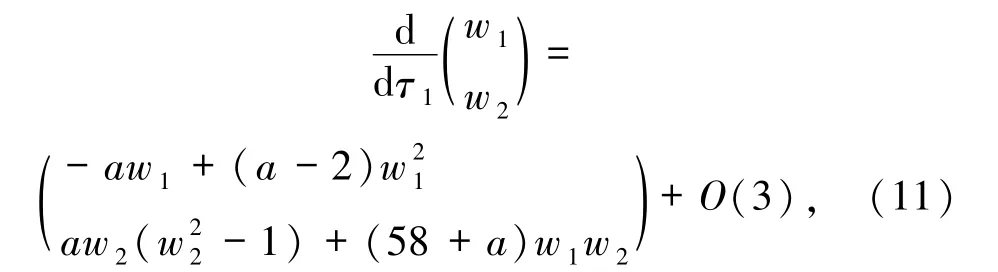
这样可以降低向量场X平衡点(0,0)的退化程度,其中dτ1=w1dt.系统(11)在w2轴有平衡点E4(0,0)、E5(0,1)和E6(0,-1),在平衡点处E4、E5和E6的雅可比矩阵分别为

故平衡点E4是稳定结点,平衡点E5和E6是鞍点.对微分方程(4)应用变换u=ξ1ξ2,v=ξ2沿着u轴进行blow-up,得到如下系统

其中dτ4=ξ2dt.系统(12)在 ξ1轴有平衡点E7(-1,0)和E8(1,0),在平衡点E7的雅可比矩阵为J(E7)=diag(-2a,2a)且J(E8)= -J(E7),故平衡点E7和E8是鞍点.
由上述过程可知,向量场X经过去奇化获得的系统只有双曲平衡点,所以对于向量场X,由定理1.2可知向量场X满足引理2.1的假设条件.由引理2.1可知,在O附近存在一个C∞微分同胚Ψ2满足j∞(Ψ2-I)=0使得


图2 映射(2)在平衡点E 0附近的相图Fig.2 Phase portrait of mapping(2)near equilibrium E 0
本文研究一类差分方程退化不动点E0的定性性质.微分方程(4)的退化平衡点比较复杂,出现了鞍点扇形,这是文献[5]中所没有涉及的情形.
致谢广东省大学生科技创新培育专项资金(PDJH2021B0309)、广东省高校重点项目(2019KZDXM032)和南京航空航天大学研究生创新基地(实验室)开放基金(KFJJ20190802)对本文给予了资助,谨致谢意.
