利用辐射噪声对舰船进行定位
2021-07-13刘亚琴杨士莪1张海刚1郭俊媛1刘岩
刘亚琴,杨士莪1,2,,张海刚1,2,,郭俊媛1,2,,刘岩
(1.哈尔滨工程大学 水声技术重点实验室,黑龙江 哈尔滨 150001;2.海洋信息获取与安全工业和信息化部重点实验室(哈尔滨工程大学),黑龙江 哈尔滨 150001;3.哈尔滨工程大学 水声工程学院,黑龙江 哈尔滨 150001)
舰船目标是水声中最常见的一类目标,其辐射噪声特性具有其自身的典型特点,经过海洋环境传播后的噪声特性除了其自身特点外还将受到海洋这一特殊滤波器的影响[1]。总体来讲,舰船辐射噪声的频谱由连续谱和线谱组成。经过信道传播后的舰船辐射噪声蕴含有丰富的目标信息,可用于对舰船目标进行探测、识别以及定位等。
利用辐射噪声线谱信息对舰船测距的相关研究中,一些学者利用目标辐射噪声的单个或多个线谱的多普勒频移信息,通过构造不同的代价函数进行参数寻优的方法来获取目标的速度、距离等[2-7],其本质是对线谱多普勒频移的实测数据和理论结果的拟合。线谱频率的测量精度对该类方法参数估计结果影响显著,本文所提方法不需要提取线谱,可以直接对接收目标辐射噪声进行处理,得到较为准确的声源位置信息;高大治等[8]利用简正波水平波数差和波导不变量之间的关系,推导了不同线谱声强随距离变化起伏的理论关系式并应用到线谱声源测距。此外,文献[9]利用移动船只辐射宽带噪声场干涉结构和扩展Kalman滤波器对其距离进行估计。上述文献均以Pekeris波导环境的波导不变量为基础,而本文考虑具有弹性海底的Pekeris环境。此外,文献[10]基于频域分子带策略和MUSIC聚焦波束形成技术,利用均匀线列阵声纳对近场舰船目标进行距离估计,而本文所提方法仅使用单接收器,并且可对远距离舰船目标进行估计。
在海洋环境参数已知时,海洋波导频谱峰值对应的频率与目标声源的深度、距离有关,目标声源为舰船辐射噪声时,由于舰船辐射噪声的频谱特性主要由连续谱和线谱组成,经过目标声源频谱的调制,海洋波导频谱峰值对应的频率点会增加。也即接收信号的频谱峰值对应的频率是海洋波导与目标声源共同作用的结果。在环境参数已知,本文给出深度、距离搜索范围,在该范围内分别计算不同深度、距离下海洋波导频谱峰值对应的频率与接收信号的频谱峰值对应的频率差值,频率差值最小时即为声源深度、距离的估计值。
1 定位原理
1.1 声场建模
如图1所示,声源位于深度为H,密度与声速分别为ρ1和c1的均匀流体层中,声源的坐标为(0,zs)。半无限弹性海底中密度、压缩波、剪切波声速分别为ρ2、cp、cs。在具有半无限弹性海底Pekeris环境下水中势函数的简正波表达式[11]为:
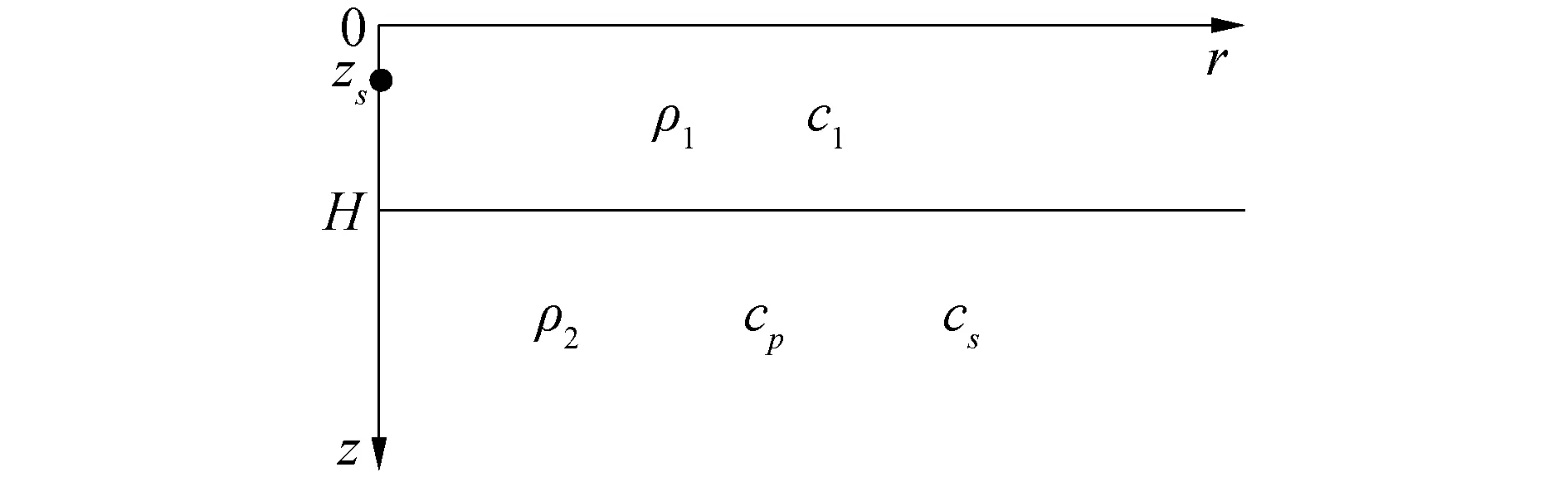
图1 环境模型
式中:

流体层中声压p(r,z,f)可用势函数表示为:
p(r,z)=ρ1ω2φ1(r,z)=
1.2 船舶辐射噪声频谱
当被测船舶在接收器有效接收距离内通过时,对接收的辐射噪声数据进行功率谱分析(傅里叶变换):
N(fn)=FFT(x(t))
式中:fn=mfs/M,m=0,1,2,…,M-1,t=m/fs;fs为采样频率;M为截取的数据点数;x(t)为接收器接收船舶水下辐射噪声时域信号;N(f)为噪声频谱。
噪声的功率谱可以表述为:
式中:S(dB)为接收器灵敏度,以1 V/μPa为参考,Δf=fs/M为频率分析带宽。
某次实验中,目标船的辐射噪声的功率谱如图2所示,可以看出虽然船舶辐射噪声成分复杂,但是在很大频率范围内,船舶噪声的频谱特征表现为线谱和连续谱的迭加。
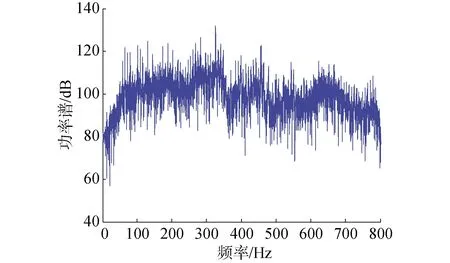
图2 实验船辐射噪声功率谱
1.3 定位方法
辐射噪声在波导环境传播距离r处的频谱为:
Y(r,z,f)=p(r,z,f)N(f)
|Y(r,z,f)|峰值对应的频率由p(r,z,f)和N(f)共同作用。当海洋环境参数已知并且N(f)不变,|Y(r,z,f)|峰值对应的频率仅与目标声源的深度、距离有关,这里用F(·)表示频谱峰值对应的频率。基于此,本文给出深度、距离搜索范围,在该范围内分别计算不同深度、距离下F(|p(r,z,f)|)与F(|Y(r,z,f)|)之间的差值,频率差值最小时即为声源深度与距离的估计值。具体步骤为:
1)设定距离、深度的搜索范围。
2)对于某一距离re、深度ze,计算F(|p(re,ze,f)|),re∈[rmin,rmax],ze∈[zmin,zmax]。
3)在re∈[rmin,rmax],ze∈[zmin,zmax]范围内定义代价函数:
式中Np为所选取的频段中峰值对应频率的数目。
4)重复步骤2)、3)直到设定的搜索范围搜索完毕。代价函数Φ(re,ze)取最小值时,对应的距离、深度即为声源距离接收器的距离与声源深度的估计值。
2 定位方法仿真分析
2.1 声速剖面对定位方法的影响
仿真3种典型声速剖面环境下本文提出方法的定位性能。其中,水深为25 m,密度为1.0 g/cm3,半无限海底压缩波、剪切波声速分别为3 800 m/s,1 800 m/s,密度为1.8 g/cm3。3种典型声速剖面示意图如图3所示。为了简便,在仿真过程中,以图2中接收噪声信号为例,简化噪声信号功率谱(仅考虑连续谱)如图4所示。
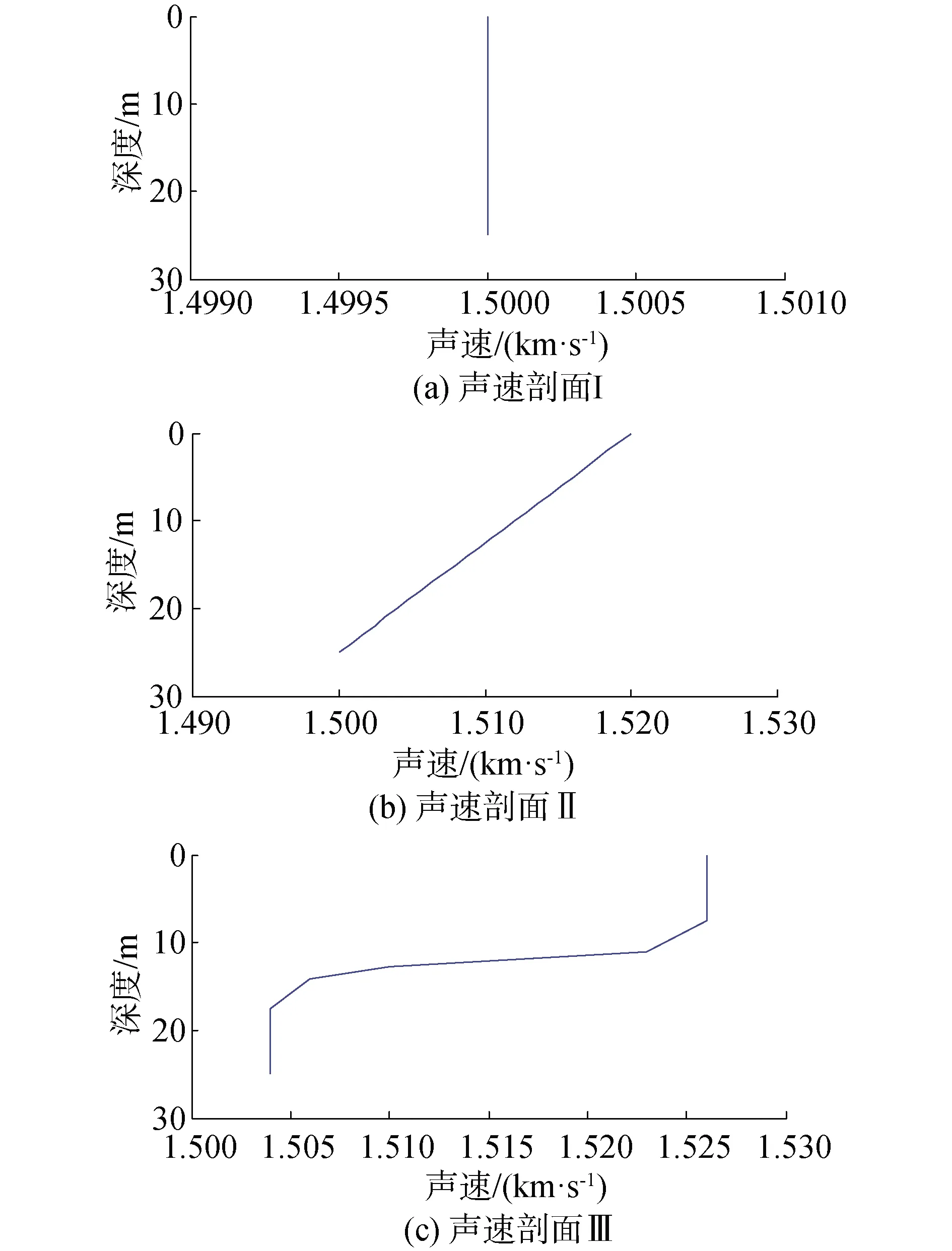
图3 3种典型的声速剖面

图4 简化的噪声功率谱
仿真过程中,声源深度为3 m,接收深度为25 m,接收距离为10 km。声源深度搜索范围1~25 m,距离搜索范围1~20 km,频段选取范围100~250 Hz,图5给出3种典型环境下log[Φ(re,ze)+1]的图形(考虑log函数的定义域,将代价函数加1)。
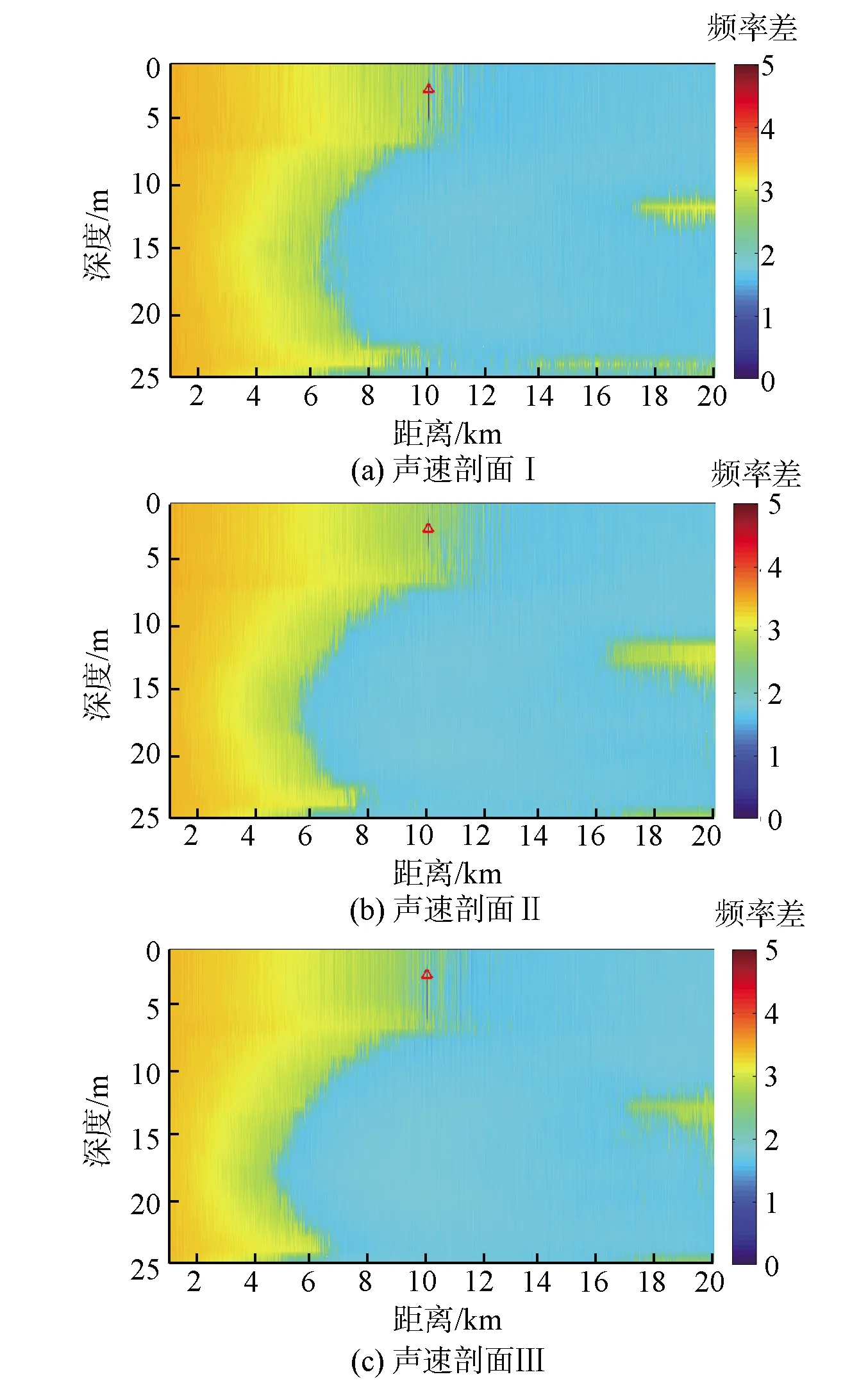
图5 接收距离10 km时,声速剖面Ⅰ、Ⅱ、Ⅲ下代价函数图及定位结果(用△表示)
将接收距离10 km变为5 km、15 km,同样用本文方法进行定位,3种剖面下的定位结果如表1所示。
从表1可以看出,在3种典型的声速剖面环境下,本文提出的定位方法均能成功地对距离进行估计,但是在深度估计方面,在声速剖面Ⅱ、Ⅲ情况下出现了多值情况(2 m或3 m)。

表1 不同环境的定位结果
2.2 线谱对定位方法的影响
在2.1节讨论声速剖面对定位方法的影响时,仅考虑了辐射噪声的连续谱而忽略了线谱的影响。为此,本节考虑辐射噪声线谱对定位方法的影响。舰船辐射噪声线谱频率fm一般集中在1 000 Hz以下,根据产生机理不同又可将其分为1~100 Hz频段和100~1 000 Hz频段。在1~100 Hz频段,线谱主要是由于螺旋桨叶片在旋转时对所有进入螺旋桨和在螺旋桨附近的不规则水流进行周期切割而产生,fm表达式为:
fm=mNs
(1)
式中:fm是线谱系列的第m次谐波,Hz;N是螺旋桨的叶片数;s是螺旋桨转速,r/s。在100~1 000 Hz频段,线谱主要来源于机械噪声源中的往复部件、不平衡的旋转部件,重复不连续性的工作部件等以及螺旋桨噪声源中的螺旋桨唱音等,此频段范围内线谱的频率因船而异,没有统一的表达式。一般线谱比连续谱高10~25 dB[12],幅度Am可以用[10,25]均匀分布的随机量近似。
仿真过程中,假设舰船为四叶桨,转速为300 r/min,即5 r/s。根据式(1),在1~100 Hz频段产生的叶片速率谱噪声的频率为20、40、60、80、100 Hz。在100~800 Hz频段的线谱假设为130、180、210 Hz。此时,仿真的舰船辐射噪声功率谱如图6所示。依然在3种典型声速剖面环境下进行定位,仿真环境同2.1节一致,仿真声源深度为3 m,接收深度为25 m,接收距离分别为5、10、15 km。声源深度搜索范围1~25 m,距离搜索范围1~20 km,频段选取范围100~250 Hz。定位结果如表2所示。对比表1和表2的定位结果,表明线谱降低了方法的定位精度,增大了距离、深度的估计误差。为了弥补方法定位精度的下降,增大使用频段范围。
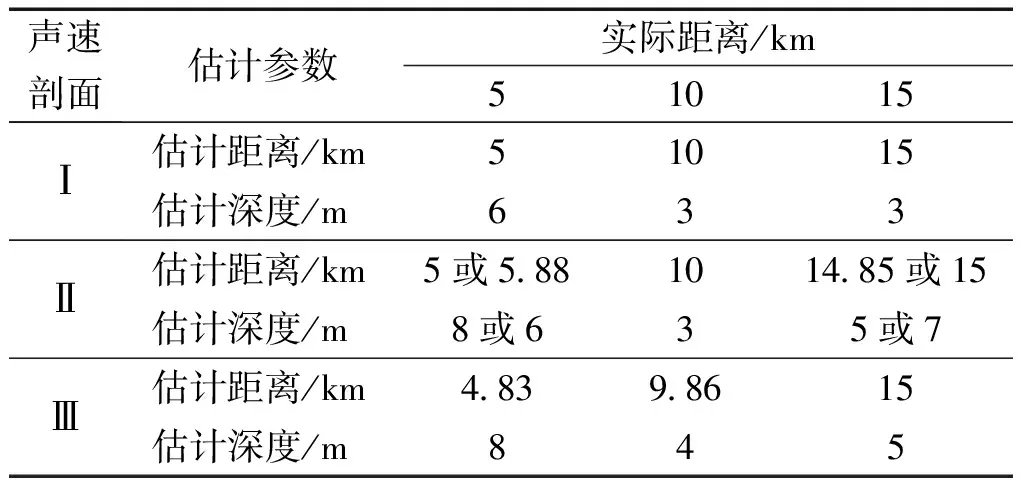
表2 考虑线谱时定位结果
增加频段使用范围为100~400 Hz。此时3种剖面下的定位结果如表3所示。对比表2和表3的定位结果,表明增加使用频段范围,方法的测距精度明显提高,虽然声源深度的估计绝对误差仍能达到±4 m,但是相较于表2中的声源深度估计结果,整体深度估计精度提高。仿真结果表明线谱会降低该方法的定位精度,但可以通过增大使用频段范围弥补方法定位精度的下降。
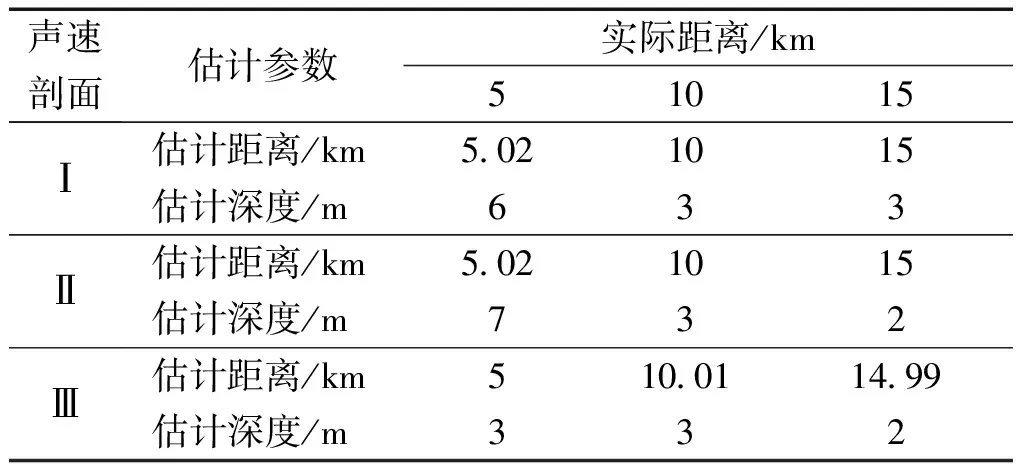
表3 增大频段时不同环境的定位结果
2.3 噪声频谱对定位方法的影响
为了分析噪声频谱对定位方法产生的影响,本节考虑了另外一种噪声频谱形式,如图6所示。

图6 辐射噪声功率谱
仿真环境同2.1节一致,仿真声源深度为3 m,接收深度为25 m,接收距离分别为5、10、15 km。声源深度搜索范围1~25 m,距离搜索范围1~20 km,频段选取范围100~250 Hz。定位结果如表4所示。
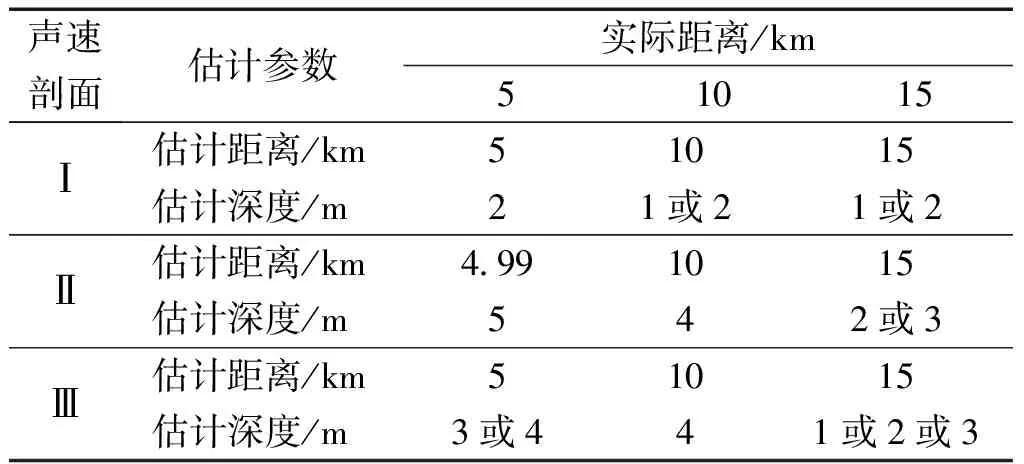
表4 不同噪声频谱形式下定位结果
对比表1和表4,噪声功率谱形式的不同会些微影响方法的定位精度。具体来看,在3种声速剖面下,方法均能成功对距离进行零误差估计(除了表2中声速剖面Ⅱ下5 km处估计值为4.99 km,相对误差0.2%)。在3种声速剖面下,方法对声源深度的估计绝对误差达到±2 m,并且有多值现象出现。
增加使用频段范围至100~600 Hz,此时定位结果如表5所示。对比表4、5,可以看到,增加使用频段范围,方法的测距精度提高,虽然声源深度的估计绝对误差仍能达到±2 m,但是多值现象与表4中相比减少。
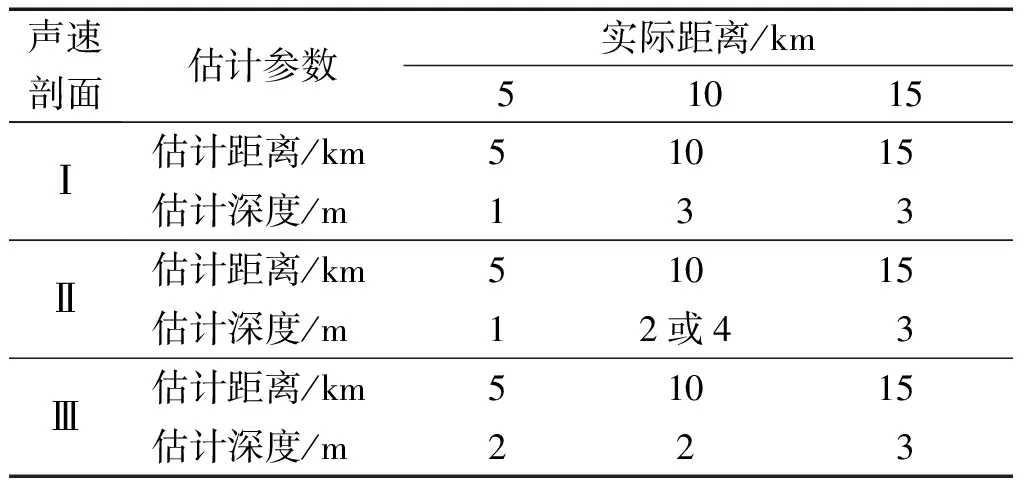
表5 增大频段时不同环境的定位结果
3 实验数据验证
利用某次实验中接收到的船舶辐射噪声进行本文方法定位性能的验证。实验选在舟山附近某海区,实验区海深约为36 m,接近水平不变海底,接收设备在海底附近,接收设备为五元矢量阵。实验当日海水声速如图7所示。海底参数通过反演获得。非合作船在距离接收设备4~6 km。
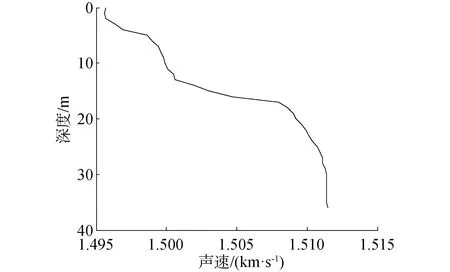
图7 实验期间声速剖面
选择五元矢量阵的2个声压通道接收时域波形如图8所示,分别对2个声压通道接收的实验数据通过小波包降噪进行预处理(5 s数据进行一次处理),得到的功率谱如图9所示(从上到下依次为通道1第1个、第2个5 s和通道2第1个、第2个5 s进行处理后的功率谱)。

图8 2个声压通道接收信号
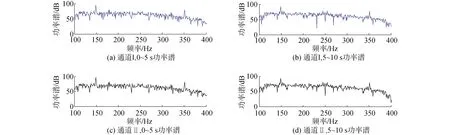
图9 2个声压通道的功率谱
分别利用这4组数据进行定位,定位结果如表6所示。通道1和通道2的距离估计结果在实际范围之内,因为声源为船舶辐射噪声,所以声源深度估计值2 m、3 m符合实际情况。实验处理结果验证了本文定位方法的有效性。

表6 2个声压通道数据的定位结果
4 结论
1)在典型的声速剖面情况下,均能利用本文所提定位方法对舰船目标进行有效距离估计,但是在估计目标深度时会出现多值现象,增加所选频段范围可以有效减小多值现象的出现。
2)无论辐射噪声功率谱是单纯的连续谱或是连续谱叠加线谱,本文定位方法均能有效估计目标距离,但是当辐射噪声功率谱叠加线谱时会降低该方法的定位精度,但可以通过增大使用频段范围弥补方法定位精度的下降。
此外,本文定位方法需知道声源谱信息,而大多数情况下声源信息未知,因此有关未知声源谱信息时舰船目标的定位问题将是接下来研究的方向。
