匀变速荷载作用下Vlazov地基上梁的动力响应分析
2021-07-13方昊刘洋郑俊杰
方昊,刘洋,郑俊杰
(华中科技大学 岩土与地下工程研究所,湖北 武汉 430074)
运动荷载作用下道路路面的动力响应问题一直以来受到学者们的关注,道路路面结构通常被视为置于弹性或黏弹性地基上的梁或板。Kim[1-2]考虑了板内应力以及板底剪切阻尼的影响,对黏弹性地基上板的动力响应进行了分析;Huang等[3]采用有限条分法研究了移动荷载作用下黏弹性地基上对边简支板的动力响应;姚海林等[4]利用Fourier变换的方法,研究了多轮荷载作用下黏弹性Winkler地基上正交各向异性薄板的动挠度;王春玲等[5]利用积分变换法,得出了移动荷载作用下弹性半空间地基上矩形薄板的动力响应解析解;颜可珍等[6]研究了在移动荷载作用下的Vlazov 地基上无限长梁的动力响应。以上研究都将移动荷载假设成为匀速荷载,实际上,车辆在行驶过程中存在大量变速的情况,例如启动、超车以及刹车,因此将移动荷载假设成变速荷载更为合理。
目前,学者们针对变速荷载下道路路面的动力响应做了一些研究,但是非常有限。Beskou等[7]和Michaltsos[8]利用振型叠加以及Duhamel积分的方法,对匀变速荷载作用下黏弹性地基上两端简支梁的动力响应进行了分析;Huang等[9]利用有限条分法研究了黏弹性地基上对边简支板的动力响应;Suziki[10]对Winkler地基上有限长梁的动挠度进行了分析。上述都将地基简化成黏弹性Winkler地基,但是Winkler地基模型过于简化,不能反映土体的性质。学者们为了改进该模型的缺陷,研究了一系列双参数地基模型。Vlazov地基就是这类模型中具有代表意义的一种。Nogami等[11-12]和高广运等[13-14]进一步得到了修正的Vlazov地基模型。而匀变速荷载作用下Vlazov地基上梁的动力响应还未见报道。
本文在已有研究的基础上,采用一种Fourier变换与有限差分法相结合的方法,并利用数值积分,得出了匀变速荷载作用下Vlazov地基上梁的动挠度数值结果。利用数值结果,进一步分析了荷载加速、减速和初速度对梁的动态挠度的影响。
1 控制方程及求解
如图1所示,假设路面梁和地基完全接触,位移连续且不考虑接触面上的剪切应力,根据Euler-Bernoulli梁和Vlazov地基理论,Vlazov地基上梁的动力控制方程可写为[6]:

图1 Vlazov均质地基上梁模型
(1)
式中:EI为梁的抗弯刚度;W为梁的位移;p为施加在梁上的荷载。对于非均质地基,假设弹性模量呈线性变化,且弹性层顶面的弹性模量为E1,弹性层底面的弹性模量为E2,则:
(2)
弹性层模量可写为:
(3)
式中:Es和νs分别表示弹性层的弹性模量和泊松比;ρs表示弹性层的密度;H表示弹性层的厚度;d、ρ和h分别为梁的宽度、密度和厚度。对于均质地基,则有E1=E2=Es。
边界条件为:
(4)
定义对x的Fourier变换为:
(5)
其Fourier逆变换为:
(6)
对式(1)中的x进行Fourier变换,可得到:
(7)
荷载可表示为:
p(x,t)=FdH[l2-(x-xc)2]
(8)
式中:
(9)
式中:F、2l、xc、x0、v、a依次表示线荷载的荷载大小、荷载宽度、任意时刻荷载位置的中心坐标、初始时刻荷载中心坐标、荷载速度以及荷载的加速度;H[·]为Heaviside函数。对荷载进行Fourier变换,可得到:
(10)
利用有限差分法,则对于时间的二阶微分可写为:
(11)

tj=Δt(j-1)
(12)
将式(11)代入式(7),可得:
(13)
式中:
(14)
(15)
采用移动坐标系的方法,可得出匀速荷载作用下的动力响应的稳态解[6]。本文采用同样的方法,求出Vlazov地基上梁的动力响应稳态解,并将该稳态解作为匀变速荷载作用下Vlazov地基上梁的动力响应的初始条件。
引入移动坐标系,对于任一匀速线荷载作用下的动力响应,令X=x-x0-vt,则方程(1)可以简化为:
(16)
定义对X的Fourier变换为:
(17)
其Fourier逆变换为:
(18)
同样地,对X进行Fourier变换,则式(1)可写为:
(19)
其中:
(20)
可以得出:
(21)
对比式(6)和式(18),由于:
W(x,t)=W(X)
(22)
可以得到:
(23)

(24)
对于第1个时间步和第2个时间步,即j=1,2的情况,将t=0,Δt代入式(24),可得出:
(25)
将式(25)代入式(13),作为式(13)的初始条件,并利用Fourier逆变换,就可得到匀变速荷载作用下Vlazov地基上梁的动力响应:
(26)
2 数值验证
为了验证本文方法的正确性,假设荷载加速度为0,则可退化成文献[6]中匀速线荷载的情况。取该文献中的参数:地基土的质量密度ρs=1 550 kg/m3,地基土的泊松比νs=0.3,地基土层厚度H=3 m,地基土的弹性模量Es=2.69×107N/m2,梁的弹性模量E=3.1×109N/m2,梁的截面是矩形截面,其中梁的宽度为d=0.3 m,梁的厚度为h=0.3 m,梁的质量密度为ρ=2 450 kg/m3,初始时刻荷载的中心坐标为x0=0,荷载强度F=3 333 N/m2,线荷载分布宽度2l=0.3 m。图2表示不同荷载速度作用下板挠度沿x轴的分布情况。本文的计算结果与颜可珍等[6]的计算结果吻合得很好,说明本文的方法正确可行。

图2 本文结果与文献[6]结果的对比
3 数值分析
荷载速度、地基土的模量以及地基土层的厚度对板的动力响应的影响已经在文献中有了详细的讨论。本文主要讨论单轴匀变速荷载作用下加速度对Vlazov地基上梁的动挠度的影响。采用文献[6]中的参数进行数值分析。
3.1 不同初速度下加速对梁动挠度的影响
图3为线荷载以不同的初速度和相同加速度a=3 m/s2运动至xc=0,250, 500, 750 m处时,Vlazov地基上梁在靠近荷载中心的位置的动挠度曲线。从图中可看出,挠度峰值发生在荷载中心,且随着运动距离xc的增加,动挠度峰值增加,振动更加剧烈。

图3 加速荷载运动至不同位置时梁在x方向的动挠度曲线
图4表示线荷载在初速度分别为v=0,30, 60 m/s,加速度均为a=0,1, 2, 3 m/s2时,从坐标原点沿x轴正方向运动的过程中,梁上在x方向不同位置对应的动挠度峰值图像。从图中可看出,当加速度大于0时,动挠度峰值随着x的增加而增加,说明匀变速状态下的动力响应是非稳态响应,且加速度越大,增加幅度越大。
对比图4(a)、(b)、(c),可以看出,当初速度为v=0时,梁的挠度幅值随着距离x的增加呈线性增加的趋势,最大增幅达到6.448 μm,增加约23.412%;当v=30 m/s,梁的挠度幅值随着距离x的增加呈线性增加的趋势,最大增幅达到7.384 μm,增加约25.874%;而当初速度为v=60 m/s,且加速度为a=3 m/s2时,梁的挠度幅值随着距离x的增加呈非线性增加的趋势,最大增幅达到12.250 μm,增加约37.879%。说明初速度越大,随着距离x的增加,动挠度增加幅度越大,加速度对于动挠度的影响越大。文献[6]中的研究成果表明:速度越大,Vlazov地基上梁的动挠度响应越大,且速度越大,速度的增加对梁的动挠度影响越大。由此可以分析,当初速度一定时,加速度越大,到达位置x处的速度就越大,Vlazov地基上梁的非稳态动挠度响应就越大,且初速度越大,加速度对梁的动挠度影响越大。由此可见,加速度对于动挠度的影响是不可忽略的。
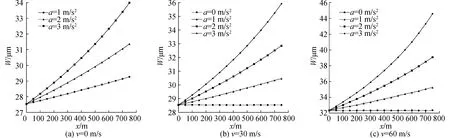
图4 加速荷载作用下梁的挠度峰值沿x方向的分布
3.2 不同初速度下减速对梁动挠度的影响
图5表示线荷载以不同的初速度和相同加速度a=-3 m/s2运动至xc=0, 50, 100 m处时,Vlazov地基上梁在不同位置的动挠度曲线。从图5中可看出,挠度峰值发生在荷载中心,且随着运动距离xc的增加,动挠度峰值减小,振动更加平缓。
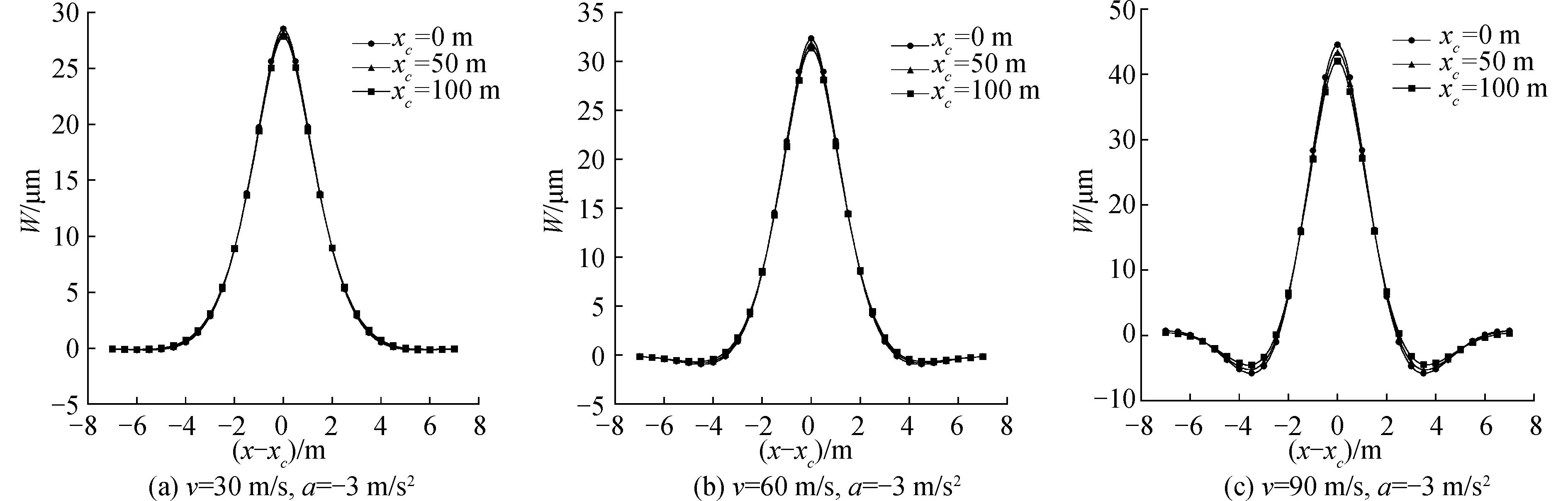
图5 减速荷载运动至不同位置时梁在x方向的动挠度曲线
图6表示线荷载在初速度分别为v=30, 60, 90 m/s,加速度均为a=-1,-2,-3 m/s2时,从x=0运动至不同位置时,梁上不同x位置对应的动挠度峰值图像。由图可看出,随着距离x的增加,挠度最大值减小,且减速越大,减小幅度越大。

图6 减速荷载作用下梁的挠度峰值沿x方向的分布
对比图6(a)、图6(b)和图6(c)当初速度为v=30 m/s时,梁挠度的最大减幅达到0.672×10-6m,减少约2.355%;v=60 m/s时,梁挠度的最大减幅达到0.977×10-6m,减少约3.021%,且梁的挠度最大值随着距离x的增加呈线性减小的趋势;当v=90 m/s,且加速度为a=-3 m/s2时,梁挠度的最大减幅达到2.512×10-6m,减少约5.636%,梁的挠度最大值随着距离x的增加呈非线性减小的趋势,说明初速度越大,动挠度峰值减小幅度越大,减速对于动挠度的影响越大。同样地可以分析出,当初速度一定时,减速越大,到达位置x处的速度就越小,Vlazov地基上梁的非稳态动挠度响应就越小,且初速度越小,减速对梁的动挠度影响越小。由此可见,减速对于动挠度的影响是不可忽略的。
3.3 梁动挠度的参数敏感性分析
本文主要对荷载初速度、加速和减速进行敏感性分析。从图7和图8可以看出,载荷在运动过程中,对于梁上的不同位置x,梁的动挠度都对梁的初速度敏感;从图9可以看出,当x≤50 m,即靠近荷载初始位置时,梁的动挠度随加速度的变化很小,即对加速度不敏感,对比a=0的情况,梁的挠度峰值增加最大也只有1.657%,但在远离荷载初始位置处,即x较大时,梁的动挠度对加速度敏感,且对比荷载匀速运动的情况,a=3 m/s2情况下梁的挠度峰值最大可增加26.736%,a=-3 m/s2情况下梁的挠度峰值最大可减少14.808%,说明梁的动挠度响应对加速更敏感。

图7 减速荷载以不同初速度作用下梁的挠度峰值
4 结论
1)随着运动距离的增加,加速荷载作用下的梁的振动幅值越大,振动更加剧烈,减速荷载作用下的梁的振动幅度越小,振动越平缓,说明梁的动挠度与荷载的运动距离有关,且加速荷载相较于减速荷载对梁的动挠度影响更大。
2)匀变速荷载的初速度对弹性地基上梁的动挠度影响非常明显,初速度越大,梁的动挠度越大,加速或减速对梁的动挠度的影响越大,即加速越大,梁的动挠度增加的幅度越大;减速越大,梁的动挠度减小的幅度越大。
3)弹性地基上梁的动挠度峰值对荷载加速度的敏感程度与距离荷载初始位置的距离x有关,当x≤50 m,即靠近荷载初始位置时,梁的动挠度峰值对加速度不敏感,但是在远离荷载初始位置处,即x较大时,梁的动挠度对加速度敏感,且对加速更敏感。在x=600 m处,对比匀速运动的情况,a=3 m/s2情况下梁的挠度峰值最大可增加26.736%,因此在工程设计过程中,将荷载考虑成匀变速荷载更合理,且应当精确测量荷载的加速度,以减少计算误差。
