On-line Modeling of Ship Maneuvering Motion by Using LS-SVM
2021-07-03,,,,
,,,,
(Wuhan Second Ship Design and Research Institute,Wuhan 430205,China)
Abstract:Incremental least square support vector machines are applied on the on-line modeling of ship maneuvering motion with integral sample structure for identification.With the integral-type Abkowitz model as the identification subject,the Mariner class vessel is taken as the research object.The Abkowitz model with 40 viscous hydrodynamic derivatives is used for maneuvering simulation,but a simplified model with 20 viscous hydrodynamic derivatives is proposed during the identification process.The proposed method is verified by the comparison of the identified hydrodynamic derivatives with their original values,and by comparison of the maneuvering simulation between the identified model and the original model.This work demonstrates that the simplified model can be well used for on-line modeling of ship maneuvering motion,and it has a good prediction effect and a high precision.
Key words:ship maneuvering;system identification;hydrodynamic derivatives;maneuvering simulation
0 Introduction
System identification modeling of ship maneuvering motion is known as the high modeling precision because the identified model is in concert with the free-running model.When the hydrodynamic experiment data are obtained,the most important factor lies in the system identification technique.Up to now,the usually-used identification methods include least squares(LS),Kalman filter(KF),model reference method(MR),prediction error method(PE),neural network(NN)and support vector machines(SVM),aswell as the improved ones of the above methods.
Compared with other identification techniques,SVM is a recently-developed method that is widely used in the area of system identification.SVM was firstly proposed in the 1990s,and afterwards it has been widely developed and improved to solve classification and regression problems.The two commonly-used improved types of SVM areε-SVM and least square SVM(LS-SVM).In the area of ship maneuvering modeling,some researchers have made some significant efforts.Luo et al[1]applied LS-SVM to identify the viscous hydrodynamic derivatives in the integral-type Abkowitz model,and Zhang et al[2]appliedε-SVM to solve the same problems.Xu et al[3]proposed the dynamic modeling of underwater vehicles’nonlinear dynamicsby using LS-SVM.
Although SVM was widely used in ship maneuvering modeling,the on-line algorithm is still not commendably developed.The difficulty of the on-line algorithm for SVM liesin the support vectors which cannot be updated along with the time step,because a support vector obtained in the last time step may be turned to a non-support vector in the next time step,and vice versa.However,the on-line algorithm can be relatively easily realized for LS-SVM,because the solution of LS-SVM can be converted to the resolution of a linear system of equations,which is a matrix-solving problem.By matrix transformation,two types of on-line algorithms are proposed,i.e.,incremental LSSVMand sliding-mode LS-SVM.
Another factor that greatly impacts the maneuvering modeling precision is the construction of sample pairs,which contains two methods,i.e.,Euler sample structure for identification(ESSI)based on the differential formula and the integral sample structure for identification(ISSI)based on the integral formula.Xu et al[4]detailedly analyzed the merits and drawbacks of the two methods.Herein the ISSIwith higher identification precision is applied to constructing the sample pairs.
This paper starts with the introduction,with the first chapter describing both the mathematical model of ship maneuvering motion and the simplified model,followed by introduction of the incremental LS-SVM.The third chapter presents the identification modeling results and discussion,covering maneuvering simulation for identification,construction of sample pairs,identification of hydrodynamic derivatives,maneuvering simulation for validation while the last chapter reveals the conclusion.
1 Mathematical model of ship maneuvering motion
The ship maneuvering motion model used in this paper is an integral-type Abkowitz model.The original Abkowitz model contains 5 inertial hydrodynamic derivatives and 60 viscous hydrodynamic derivatives.According to the experimental results conducted by Chislett et al[5],the 60 viscous hydrodynamic derivatives are simplified to 40.The non-dimensional ship maneuvering model is described asfollows:




The above formulas demonstrate that most of the 3-order terms are removed,and the linear hydrodynamic derivatives are ultimately conserved.Furthermore,the expression of the sway motion and the yaw motion still keeps the same format,which is of great convenience for the parameter identification.
2 Incremental least square support vector machines
A remarkable characteristic of LS-SVM is that all the sample pairs are set as support vectors.The solution results of LS-SVM are Lagrange multipliers and bias,and the incremental LS-SVM is to update the Lagrange multipliers and bias along with the increase of time step.It can be seen that once the time steps are long enough,the solution of incremental LS-SVM will plunge into the curse of dimensionality.Another sliding-mode LS-SVM can commendably overcome this problem,because the sliding-mode windows keep invariable along with the increase of time step.However,as a result of the sliding-mode LS-SVM only updating the Lagrange multiplier and bias,it absolutely discards the identified parameters in the last time step.Consequently,the parameters identified in this manner will not be available.Therefore,the incremental LS-SVM is adopted,and the length of the sample pairswill be confined in an appropriate extent.
The sample dataset is set as{x(t),y(t)},wheretdenotes the sample is variable along with the time updating,x(t)=[x1,x2,…,xt],y(t)=[y1,y2,…,yt].The solution of LS-SVM can be concluded asthe solution of the following linear matrix:

wheree(t)=[ 1,1,…1]t;bis the bias;αare the Lagrange multipliers;Γ(t)=Ωt+C-1I,whereIis the unit matrix,Cis the rule factor,Ωt(i,j)=K(xi,xj) is the kernel function.
Thus,b(t) andα(t) can be obtained from the matrix transformation of Eq.(2),


In this way,the realization of the incremental LS-SVM lies in the on-line calculation ofΓ(t).Similarly,by the matrix conformation of the kernel function,the updating ofΓ(t)-1can be given as follows:

where,w(t+1)=k(xt+1,xt+1)+1/C,W(t+1)=[k(x1,xt+1),…,k(xt,xt+1)]T.
Oncebandαare calculated as the increase of time step,the regression problem of incremental LS-SVMcan be solved,

The on-line identified parameters can be gained as

3 Modeling results and verification
This chapter presents the maneuvering simulation,the construction of the sample pairs,the comparison of the identified hydrodynamic derivatives,and the comparison of the maneuvering simulation based on the identified model.
3.1 Maneuvering simulation
Based on the main data and hydrodynamic derivatives of Mariner class vessel as given in Ref.[5],25°/25°zigzag test is conducted by using 4th-order Runge-Kutta method,where the simulation time step is set asΔt=0.5 s,and the total simulation time is set as 500 s.Besides,the initial surge velocity is set as 7.717 5 m/s.The mathematical model of steering gear for the rudder is defined as


3.2 Construction of sample pairs
Based on the ISSI,the construction of the sample pairs can be given asfollows:

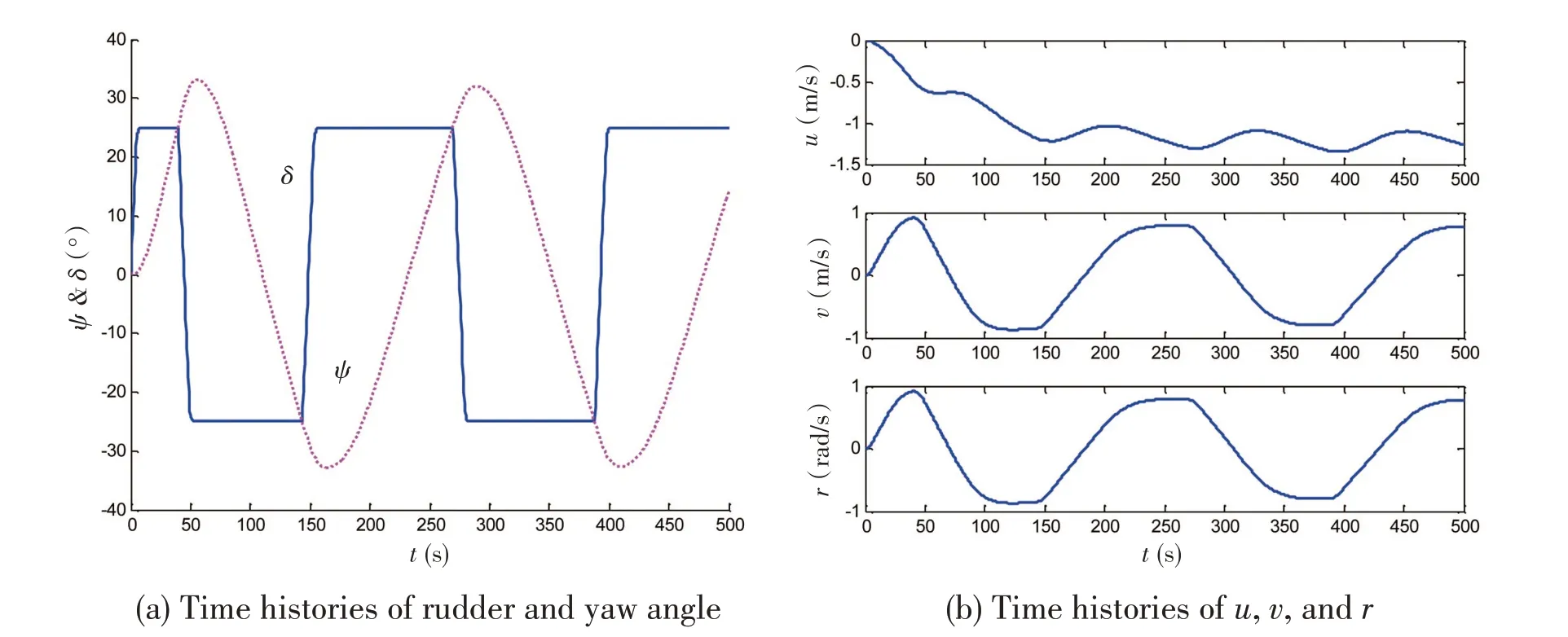
Fig.1 Time histories of 25°/25°zigzag maneuvering simulation results



Assuming the hydrodynamic derivatives will be identified asthe following simple symbols:

The output samples can be described as follows:

Once the unknown vectorsA,BandCare solved,the hydrodynamic derivatives to be identified can be obtained.For the detailed solution approach of the hydrodynamic derivatives,Ref.[4]can be referred to.
3.3 System identification
Based on the proposed incremental LS-SVM as described in Chapter 3 and the construction of sample pairs as described in Section 3.2,the 20 viscous hydrodynamic derivatives in the simplified Abkowitz model are identified by using the simulation data given in Section 4.1.Herein,as a result that incremental LS-SVM is not good at dealing with large numbers of sample sets,the sample interval is set as 2 s,and a total of 250 sample pairs are obtained.Besides,the initial number of sample pairs for incremental LS-SVM is set as 20,and the on-line identification results is 230.Some on-line identification results are shown in Figs.2-4,where all the hydrodynamic derivatives are multiplied with 105.It can be seen that the on-line identification results in surge motion are quickly convergent to their expectable values,but the identification results in sway and yaw motion are not as good as that in surge motion.The reason is that the simplified model is greatly reduced in sway and yaw motion,i.e.,a total of 15 viscous hydrodynamic derivatives are reduced to 6,while a total of 10 viscous hydrodynamic derivatives are reduced to 8 in surge motion.

Fig.2 On-line identification results of non-dimensional and

Fig.3 On-line identification results of non-dimensional and

Fig.4 On-line identification results of non-dimensional and


Tab.1 Identified hydrodynamic derivativesin surge motion(×105)

Tab.2 Identified hydrodynamic derivatives in sway motion(×105)

Tab.3 Identified hydrodynamic derivatives in yaw motion(×105)
3.4 Verification
Besides,the maneuvering simulation is also conducted for verification of the identified model.15°/15°zigzag maneuvering simulation is carried out by using the original experimental hydrodynamic derivatives and the identified simplified models respectively,and the comparison is shown in Figs.5-6.It can be seen that the simulation results based on the original 40-viscous hydrodynamic derivatives are in good agreement with these based on the identified 20-viscous hydrodynamic derivatives,although the identified hydrodynamic derivatives are not in agreement with the experimental values.

Fig.5 Time histories of u,v and r

Fig.6 Time histories of rudder angle and yaw angle
4 Concluding remarks
A new approach is proposed for identification modeling of ship maneuvering motion.The hydrodynamic derivatives in the Abkowitz model with simplified 20-viscous parameters are identified by using the incremental LS-SVM,where ISSIis used for the construction of sample pairs.By comparison of the identified hydrodynamic derivatives with their original values,most parameters are in good agreement.By comparing the maneuvering simulation results between the identified simplified model and the original model with 40-viscous parameters,the proposed identification modeling approach is commendably verified.This work is of directive significance for ship maneuvering modeling based on system identification and free-running model test.The next-step work is to develop the identification modeling of ship maneuvering motion by using free-running model test data based on model selection approach in combination with the sensitivity analysis.
杂志排行
船舶力学的其它文章
- Application of the Cell-vertex Finite Volume Method in the Solution of the Lubrication Characteristicsof Journal Bearings
- Numerical Simulations on the Dynamic Characteristicsof a Shallow-draft Spar-type Floating Wind Turbine
- Study on Torque Characteristics and Structural Strength of Large Container Shipsunder Oblique Waves
- Collapse Analysis of Model Sphere of Titanium Manned Cabin under External Pressure
- Numerical Investigation of Dynamic Responsesof Ship Structure and Gas Turbine Subjected to Underwater Explosion
- Study on the Performance of Micro-perforated Plate Absorber under Coupling