汽车行业喷涂机器人的规划思路
2021-06-17饶槐叶显松谢国菊饶秋喜
饶槐,叶显松,谢国菊,饶秋喜
(吉利汽车集团有限公司,浙江 宁波 315000)
随着世界经济不断发展,汽车需求量不断加大。国内外整车生产工厂如雨后春笋般拔地而起,而涂装是整车生产不可或缺的一环。随着喷涂机器人控制技术的日益完善以及价格的逐渐降低,已经有越来越多的新建涂装线以大规模的机器人取代传统的人工喷涂或往复机喷涂。喷涂机器人具有自动化和柔性化程度高、工作可靠等优点,能够获得稳定的涂装品质和涂料利用率,并且大幅降低了工人劳动强度、涂装成本和VOC(挥发性有机化合物)排放量[1]。
1 涂胶机器人的类型及布置方案
1.1 车底焊缝密封胶(UBS)机器人
UBS 自动涂胶机器人是采用高压输送方式将密封胶挤涂到车身底部的焊缝上,在焊缝处形成一条外观平整、密封严实的扁形胶条,进而提高焊缝的密封和防腐效果、省人省力的自动化涂装技术。根据节拍30~ 40 JPH,一般UBS 站布置4 台机器人,采用轨道式安装来提高柔性,尺寸较小的车型也可以采用固定安装式。室体尺寸要求为:长6 000~ 7 000 mm,宽5 000~ 5 500 mm,高4 500 mm。图1 是2 款典型产品。
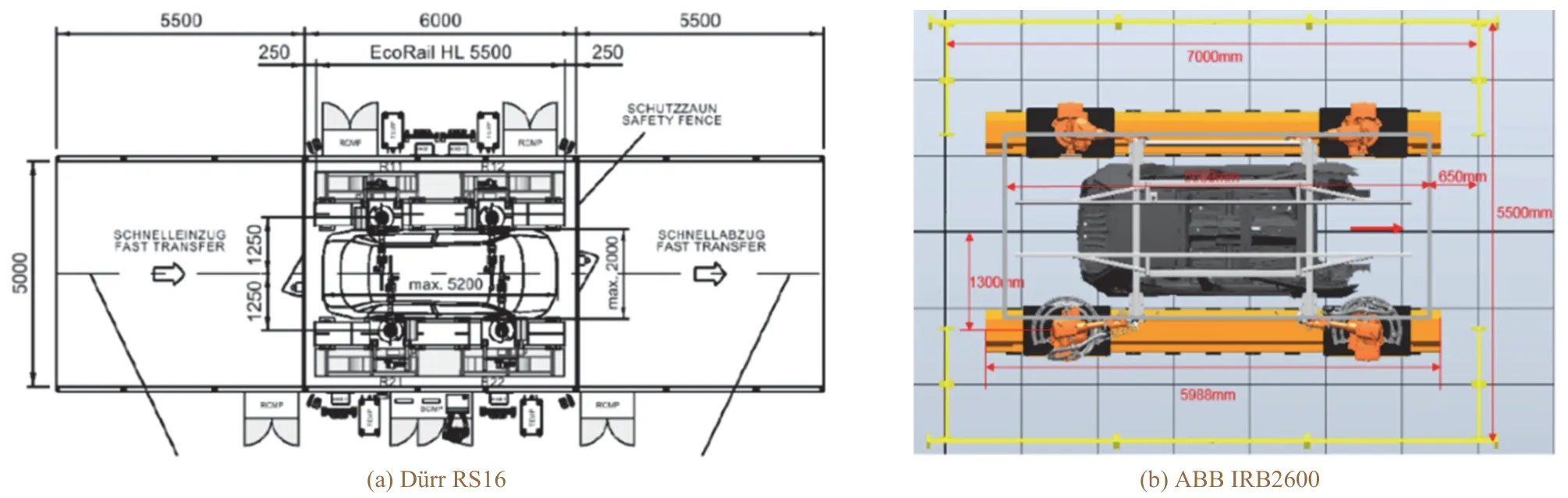
图1 2 款典型的UBS 机器人Figure 1 Two typical underbody seam sealing robots
1.2 车底防石击PVC 胶(UBC)机器人
UBC 自动涂胶机器人是采用高压喷涂方式将PVC(聚氯乙烯)胶喷涂到车底底盘、轮罩等区域。以达到良好的车底防腐蚀、耐磨损、密封、粘结等性能。UBC 机器人和UBS 机器人一般采用同一型号的机器人本体,只是喷涂的区域有所区别,它们对室体尺寸等要求都相差不大。但是由于现代产品升级,很多车型对PVC 的喷涂区域要求越来越少,改用底盘护板进行装甲保护,因此UBC 机器人一般2 台就足够满足节拍要求,甚至越来越多的厂家取消了UBC 涂胶机器人的布置。
1.3 车内焊缝粗密封胶(ISS)机器人
ISS 自动涂胶机器人是一种针对车内钣金焊接处缝隙进行密封的涂胶机器人,用于密封容易被锈蚀或质量要求高的缝隙。常规的粗密机器人站一般由4 台涂胶机器人加上2 台开盖机器人组成,室体一般要求长10 000 mm、宽6 000~ 6 400 mm、高4 500 mm。车内焊缝密封胶的喷涂与车底焊缝密封胶的喷涂有本质上的不同,因为需进入车内涂胶,所以手臂要更长。对于开盖机器人,可以顶置,也可以放置在涂胶机器人轨道的端头,后者可能需要更长的室体,但前者可能有维修不便的缺点,需要综合考虑。图2 是2 款典型的产品。
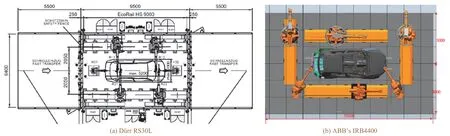
图2 2 款典型的ISS 机器人Figure 2 Two typical interior seam sealing robots
1.4 细密封(FAD)机器人
FAD 折边胶机器人主要是对四门两盖、尾灯等处的细密封进行涂胶,国内的一些企业(如通用、大众等)开始有应用。
1.5 车内水性丙烯酸阻尼(LASD)胶机器人
LASD 机器人主要是在车内局部需要降噪的地方喷涂块状阻尼胶。它代替了传统的贴阻尼片工艺,更加环保。LASD 机器人和内部粗密封机器人在喷涂方式上类似,所以在机器人本体的选用上一样,不过水性阻尼胶的喷涂对计量要求较高,所以一般采用定量缸的配置,以达到更高的涂胶质量。当然,若成本控制不那么严格的话,焊缝胶也可以采用定量缸的配置。阻尼胶的喷涂对开盖要求并非千篇一律,主要根据产品需求,比如特殊位置不开启前后盖可能无法满足机器人的可达性要求,所以需要配置开前盖或者后盖的机器人。
1.6 车顶流水槽(RDA)涂胶机器人
RDA 机器人主要是对车顶两侧的导水槽进行涂胶作业,以达到车顶的防腐蚀要求。由于车身焊接工艺的提高,一些车型采用激光钎焊技术,加上自动喷涂车顶胶对输送精度的要求高以及机器人需要安装轨迹修正等摄像技术而导致成本攀升等因素,因此RDA 机器人的应用不是很广泛。
1.7 裙边涂胶(RPP)机器人
RPP 机器人主要是对车体门槛进行喷胶作业,通常带有一个自动遮蔽的转盘以及由真空泵组成的废料回收系统。随着车型材料的优化升级,不少车型采用门下饰板代替了传统的裙边涂胶,但在一些入门级车型中,RPP 机器人仍有应用。
2 整车喷涂机器人的类型和布置方案
整车喷涂机器人分为擦净机器人、内喷机器人和外喷机器人。随着工业自动化程度不断加大,越来越多的新建涂装车间开始在内喷中用自动喷涂机器人代替传统的人工喷涂,甚至一些老车间经过内喷段的改造后也添置了机器人喷涂。
在中涂或者面漆喷涂之前通常会对车身进行擦净工作,以获得洁净的车身。擦净设备分很多种,例如五辊擦净机、鸵鸟毛擦净机器人、剑刷机器人,见图3。另外,鸵鸟毛擦净设备的前后都会配置一套离子风设备,前道离子风主要是清洁车身灰尘,后道离子风则是中和鸵鸟毛产生的粒子。

图3 几种常见的擦净设备Figure 3 Several common cleaning equipment
现在主流的喷涂工艺为3C2B 工艺和免中涂的B1B2 工艺。对于内喷喷涂站,水性的中涂和色漆内喷站一般配置喷涂机器人、开门机器人及开前后盖机器人。主流的节拍一般是单线30 JPH或双线60 JPH,针对5 m 左右长度、面积不超过9 m2的喷涂,一般4 台即可,加上4 台开门机器人以及2 台开前盖和后盖机器人,就组成一个内喷喷涂站。针对特殊造型多的车型,可能要适当增加喷涂机器人数量才能达到节拍需求。一般机器人公司也会有相应的计算公式帮助测算,图4 所示就是杜尔公司推出的一款测算工具,经过后期调试验证,基本能够满足前期的规划要求。
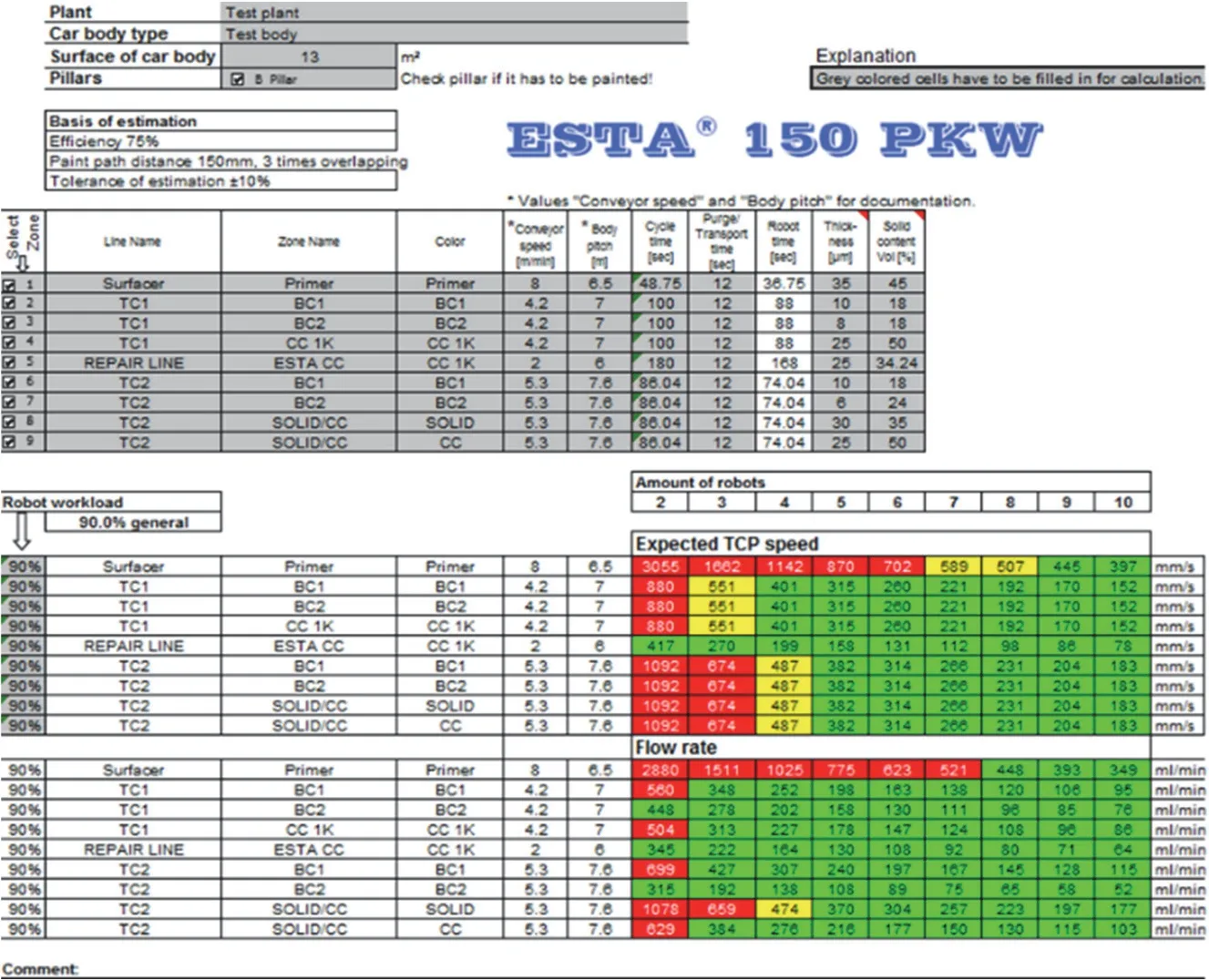
图4 杜尔公司的节拍测算工具Figure 4 Dürr’s takt time calculation tool
对于单线节拍较高(如净节拍超过40 JPH)的车间,车型面积又较大的话,整站的机器人就会过多,无法布置,可能需要设置两个站来喷涂,将后盖放在第二站喷涂,如图5 所示。对于机器人较多的站,一定要规划好机器人轨道的长度,结合机器人喷涂的TCP(工具中心点)运动速率、重叠率、喷幅等参数以及各个机器人的边界设定,规划好最佳的轨道长度。当然,一些机器人厂家研发出的单体七轴机器人(如图6 所示)在不用轨道的情况下也能够满足内喷站的喷涂可达性需求。另外,输送的形式也对机器人布局有一定影响。简单来说,stop&go(走停)模式比line tracking(直线跟踪)模式需要更宽的室体,对机器人有更高的可达性要求,但是stop&go(走停)模式的故障率和撞车风险都较低。
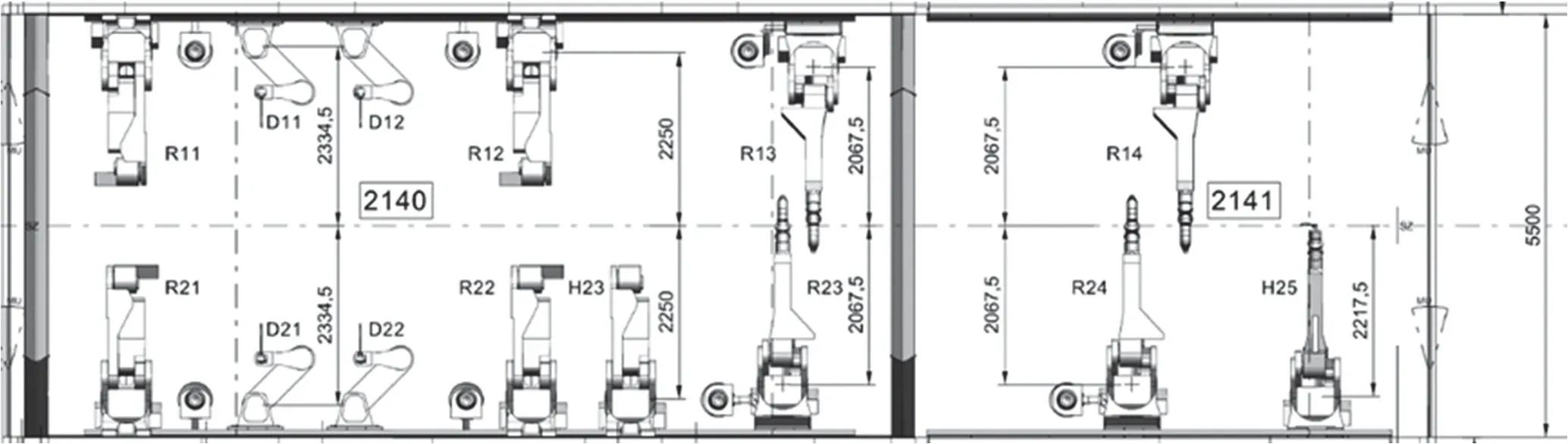
图5 杜尔公司的两站布局图Figure 5 Dürr’s two-station layout

图6 几种主流的单体七轴机器人Figure 6 Several widely used seven-axis robots
对于溶剂型2K 清漆内喷站的机器人布局,在空间上基本与色漆保持一致,只是在机器人配置上有所增加,比如雾化器清洗机,因为清漆的黏度比色漆高,更容易在雾化器上积漆,且难以擦拭。另外很多车间配置的是干式喷漆室,所以机器人端都会配置废溶剂回收漏斗,而给清漆漏斗配备反冲洗装置则显得不可或缺,否则漏斗积漆是一个不得不面对的问题。
对于外喷喷涂站,一般采用“前道+后道”的两道喷涂方式。但是素色漆由于遮盖力较高,因此只需要单道喷涂,另外一道的机器人可以在降级模式(即某台机器人出现故障)下使用。对于金属漆,则两道都需要喷涂,第二道机器人采用双整形空气环的配置,以控制金属颗粒的均匀排布,达到最佳外观效果。外喷机器人布置也有轨道式和固定位置式。无论喷涂线是line tracking 方式还是stop&go 方式,轨道式机器人的柔性化都要比固定位置方式的机器人好,特别是现在车型尺寸越来越大,固定式机器人可能在一些边角区域的可达性会有影响,又或者固定式机器人做不到最佳的喷涂姿态。不过机器人厂家也在不断研发,通过优化手臂机构以达到最大的臂展区域,比如上述的单体七轴机器人在国内一些生产线已开始有应用。究其原因,主要是轨道式机器人固然柔性化高,但是成本高,后期维护保养复杂,故障率也高,而单体式机器人占用空间小,布局简单,能耗也低,将来应该有更好的推广应用。
3 塑料件喷涂机器人的类型和布置方案
随着车企对保险杠、门槛、轮眉等塑料外饰件的颜色要求日趋多样化,越来越多车企采用自建生产线代替委外的方式来喷涂塑料件。而塑料件造型复杂,喷涂质量要求高,喷涂机器人是不二之选。塑料件喷涂机器人按照塑料件喷涂的工艺顺序分为火焰机器人、底漆喷涂机器人、色漆喷涂机器人和清漆喷涂机器人。
火焰机器人作为塑料件喷涂的首道工序,主要目的是通过火焰处理去除塑料件表面的杂质,提高塑料件的表面张力和表面能,从而增强喷漆与基体的结合强度[2]。用于表面处理的还有干冰机器人,如图7所示。对于40 UPH 的节拍,一般2 台机器人分布两侧就可以满足需求,也有塑料件单侧挂件的做法,那么单侧布置1 台机器人即可,具体数量还是要根据产品的挂法和节拍快慢来定。至于室体要求,宽度相对于车身窄一些,一般5 000 mm,图8 就是常见的火焰站布置方法。

图7 表面处理用火焰机器人(a)和干冰机器人(b)Figure 7 Flaming robot (a) and dry ice robot (b) for surface treatment
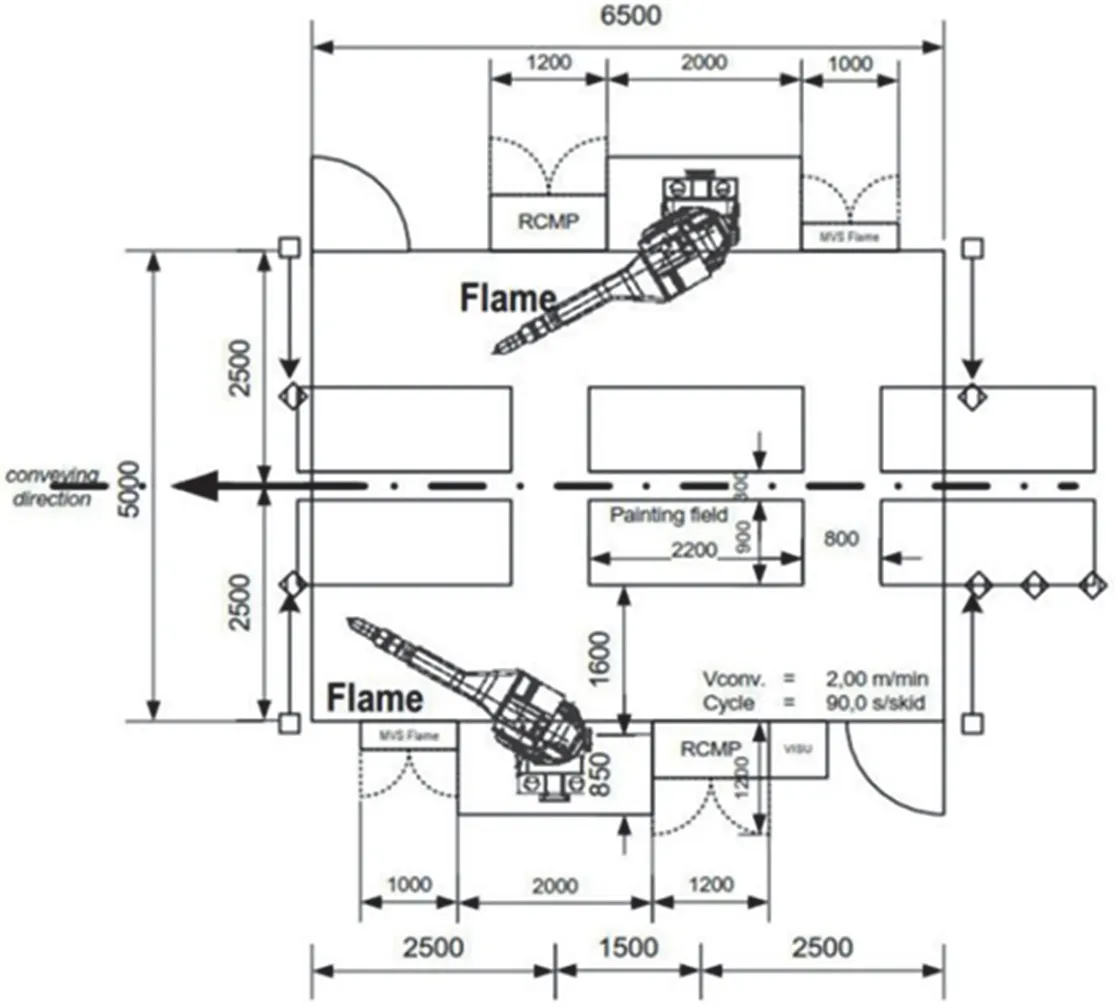
图8 火焰站布置方式Figure 8 Layout of flaming station
底漆的作用是提高油漆在底材上的附着力,通过底涂处理剂使油漆涂层与底材表面形成良好的结合,避免喷涂过程中因局部或者是全部涂层由于附着力不良而出现涂层缺陷。底涂机器人通常是由2 台落地式喷涂机器人组成,采用高速旋杯或喷枪喷涂(不加电),室体要求长7 000 mm、宽5 000 mm、高4 500 mm。
塑料件色漆喷涂机器人与车身色漆喷涂机器人原理一致。鉴于环保要求,现在色漆基本上都是水性漆,大多数机器人供应商采用的都是水性漆外加电技术,但是在保险杠边角区域可能外加电的静电环会影响喷涂,所以一些车企也会选择内加电的水性漆喷涂,例如ABB 的弹匣式机器人和发那科(FANUC)的Canister 油漆罐填充方式机器人,但这会带来成本的上升。色漆机器人通常要4 台,这也是喷涂金属漆的常规配置。
作为塑料件喷涂的最后一道工序,与车身一样,喷涂清漆是为了让色漆保持原有的色彩纹路,形成光滑的薄膜以保护塑料件外观。清漆的膜厚较大,所以两道喷涂是基本配置,4 台机器人组成两道,有些节拍比较快的车间还可能采用3+3 的布局方式。图9 是塑料件喷涂站的常规配置,具体数量应依据节拍、塑料件面积和挂法详细核算。
4 其他种类的机器人
随着科技不断进步,因应汽车生产过程中需求的全面化和多样化,市场上不断涌现出新的机器人产品。譬如用于在线外观缺陷检测的带视觉机器人,用于离线检查测量工艺参数的机器人,用于打磨和注蜡的机器人,用于注蜡后道工序的发泡机器人,等等。企业可以根据自身条件和需要进行配置。
5 结语
本文只在各个机器人服务商的产品分类的基础上对涂装车间喷涂机器人的种类和布局进行了大致的讲解,主要谈到机器人数量需要根据线体的节拍、产品的面积、喷涂的工艺等多个因素综合考虑,机器人的布置方式需要从后期运行与维修的便利性、成本等方面综合衡量,内容可能不够全面,但也希望对新建或改造的涂装线喷涂自动化设备规划有借鉴意义。
