锥形束CT引导机器人辅助反肩关节肩盂基座螺钉导针置入精准度研究
2021-06-16韩巍张腾黄强张勇王彬彬吴新宝王军强
韩巍 张腾 黄强 张勇 王彬彬 吴新宝 王军强
0 引言
随着人口老龄化发展,肱骨近端骨折发生率逐渐增高。对于老年粉碎性肱骨近端骨折,常伴有严重的肩袖损伤,但是无论是切开复位钢板内固定还是人工肱骨头置换,其预后均依赖良好的肩袖功能。反肩关节置换术是传统肩关节置换的一种替代方法。这个方法颠倒了肱骨和肩胛骨分别作为关节球和关节窝的关系,关节球连接到肩胛骨上,关节窝连接到肱骨上,使旋转中心外移,让三角肌弥补损伤的肩袖,可以增加肩关节的稳定性和活动度,最大限度恢复肩关节功能。反肩关节的适应证从最初的肩袖关节病拓展到包括严重的肩关节骨关节炎、翻修性关节成形术、不可修复的肩袖撕裂、类风湿关节炎、肿瘤、肱骨近端骨折和骨折后遗症等[1-8]。
反肩关节假体肩盂基座的位置决定了关节活动、撞击、假体-骨表面应力等[9],影响着术后功能和假体长期生存率[10]。基座位置的精准置入,有赖于基座螺钉导针的精准入点和角度选择。然而,反肩关节置换术中术野有限、解剖标志点不清、肩胛骨形态复杂多变,这些因素都加大了手术操作的难度[11]。此外,无论是初次置换还是翻修手术,异常形态肩盂和骨缺损均比较常见,进一步加大了肩盂基座准确放置的难度[12]。如何精准安全地置入基座螺钉导针,以此提高反肩关节假体稳定性、延长假体生存时间、改善患者预后,是反肩关节置换的难点,同时也是研究热点之一。
随着计算机导航技术和机器人技术的发展,机器人被越来越多地应用于骨科手术中,其中以美国史赛克(Stryker)公司的Mako手术机器人为代表,被广泛应用于髋膝关节置换,临床研究证实可显著提高假体放置的准确性[13]。国内骨科手术机器人由天智航医疗科技股份有限公司研发生产的天玑®(TiRobot)骨科手术机器人领衔,为通用型骨科手术机器人,可应用于创伤、脊柱、关节等手术[14],目前已升级二代产品。但是,国内外尚未有机器人应用于反肩关节置换的研究和报道。
为了提高反肩关节肩盂基座螺钉导针置入的精准度,本研究模拟临床手术场景,利用术中锥形束CT(cone beam CT, CBCT)引导导航机器人对肩胛骨模型进行肩盂螺钉导针的置入,比较术前导针规划与术后实际位置之间的偏差,旨在评估该手术方法的精准度和有效性,为机器人辅助反肩关节置换手术的开展提供理论支持。
1 研究方法
1.1 实验材料及操作
本研究采用12例SYNBONE肩胛骨模型(聚氨酯材料)进行实验。将模型固定在手术床上,喙突固定示踪器,机械臂末端安装标尺板,移动至肩胛骨模型上方并尽量贴近模型(图1)。

图1 模型骨和机器人各组件的摆放位置关系
使用移动式术中CBCT成像设备(Siemens Cios Spin,Germany)进行锥形束CT扫描。将包含有标尺板信息与解剖信息的图像数据上传到TiRobot 2.0机器人工作站,由高年资医师在计算机软件中进行螺钉位置规划(图2)。入钉点选择为肩胛盂关节面横轴与纵轴交点偏下5 mm处,调整导针规划方向,在保证导针方向与肩盂关节面法向量呈下倾10°~15°范围的前提下,寻找最长钉道。

图2 机器人辅助术前规划的三维图像
完成规划后,机械臂末端安装定位套筒,运行至螺钉规划所在位置。当机械臂运行到位后,沿套筒置入导针(图3)。
图3 机械臂引导置入导针场景
1.2 数据标记及指标评估
本研究通过比较导针规划位置与实际置入的位置和两个位置路径之间的夹角进行精度的计算。首先通过TiRobot规划软件将规划影像与导针实际置入影像进行图像融合,然后在覆盖图像上标记导针的计划入针点和计划尾端止点,基于欧式距离分别计算计划与实际相比较的入针点偏差(mm)和尾端止点偏差(mm)。
入针点偏差=
尾端止点偏差=
式中:(EX,EY,EZ)为计划入针点坐标;(EX′,EY′,EZ′)为导针实际入针点坐标;(TX,TY,TZ)为计划尾端止点坐标;(TX′,TY′,TZ′)为导针实际尾端止点坐标。
分别在冠状位和矢状位上测量规划路径和导针实际路径两条线的夹角,并对夹角求平均值作为总体角度偏差(图4)。

图4 导针入点偏差和角度偏差测量方法
1.3 统计分析
2 结果
12个肩胛骨模型均一次操作即完成导针置入,所有螺钉尾端均未穿出皮质。实际与计划入针点、尾端止点位置及两者位置连线间的夹角比较见表1。
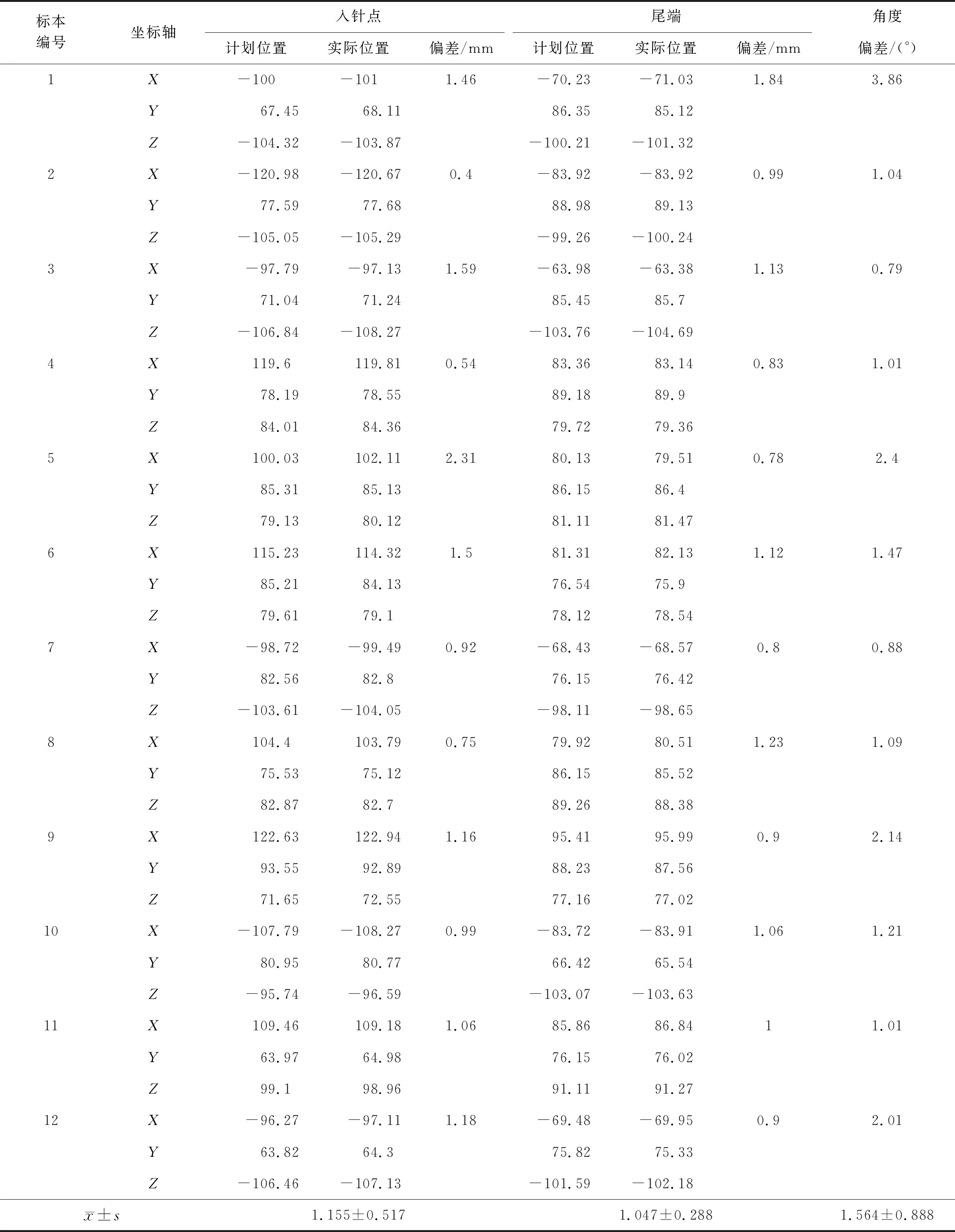
表1 实际与计划入针点、尾端止点、手术路径角度的比较
3 讨论
本研究验证在CBCT引导下使用机器人辅助反肩关节基座螺钉导针置入的精确性。在临床手术实际操作中,基座螺钉导针的置入需要配套手术导向工具辅助完成,或者依照手术医生的经验徒手完成,通常与理想规划位置偏差较大。本实验结果显示,术前规划与术后实际结果对比,距离偏差在1mm左右,成角偏差在1.5°左右,最大的入点偏差为2.31 mm,最大的角度偏差为3.86°,说明导航机器人整体的系统偏差在临床接受范围内。实验中所有导针均一次操作即成功置入,相比徒手操作具有显著优势。由于肩胛骨体积小骨量少,特别是亚洲女性,导针位置不满意而多次操作将增加神经损伤的风险,穿透骨皮质会导致基座螺钉把持力降低。并且一次置入成功可避免多次X线透视验证,减少了医生和患者的放射线暴露。
人工反肩关节置换是治疗肩关节退行性疾病的重要方式之一,对术者的经验技术要求较高。传统手术基座放置存在以下问题。
(1)安全性。 肩胛骨是不规则骨,周围有肩胛上神经与肩胛上动静脉穿行。传统手术方式术中视野有限,无法获取整个肩胛骨及周围组织的解剖形态,置入螺钉时方向不当时容易穿出骨皮质损伤周围神经血管,为避免损伤在透视下置入又会增加医务人员与患者的放射线暴露时间,且肩胛骨透视拍摄角度要求苛刻(如腋位),频繁透视增加手术时长。
(2)有效性。中央螺钉的位置和方向决定了肩盂球假体的位置和方向,从而影响整个关节的活动度、生存率、并发症。正常肩胛盂关节面有 5°~7 °的向上倾斜,但是由于反肩关节设计的特殊性,按照上倾角度安放肩盂假体容易造成假体不稳定、早期松动,最终假体失效[15- 16]。目前临床普遍接受基座安放在下倾10°~15°,以获得好的活动度,减少并发症[17-18]。传统手术方式使用假体厂商提供的固定角度工具进行定位,这种方式也有缺点。一方面患者存在个体差异,固定角度无法满足所有患者置钉的安全有效性需求;另一方面遇到肩盂骨质缺损,关节面畸形[19-20]等情况下,现有工具无法有效完成定位作用。
(3)稳定性。基座靠螺钉的把持力固定在肩盂之上,以此提供其稳定性。螺钉的把持力取决于螺钉与骨的接触面积,而传统手术过程中,由于透视X线片信息具有局限性,术中无法准确获取并精确把握安全范围内最长通道的角度,使用固定角度工具同样无法判断其通道长度。
相比传统手术方式,机器人辅助反肩手术尽管存在配准技术要求高、CBCT价格昂贵等需要解决的问题,但在临床应用中有很多不可替代的优势:(1)基于CT影像,通过图像配准技术,解决了传统手术术野局限性问题;(2)基于术前影像,可根据每一位患者的肩胛骨形态、肩盂方向、骨缺损情况等信息,给予个性化的术前规划;(3)术前即可了解理想规划下螺钉的角度和长度,以及出入点位置信息,在保障安全性的同时,最大化螺钉长度,提高了稳定性;(4)机械臂的加入相较徒手操作,增加了稳定性,提高了操作的精确性;(5)只需术前CT扫描和术后确认,减少了徒手操作时反复透视带来的放射性暴露损伤。
同时,本研究也存在一些局限性:(1)实验误差。导针置入后在CBCT影像中会存在金属伪影,使得在选择入针点和尾端时存在测量误差;配准精度、光学追踪系统精度等系统固有误差;肩胛骨模型质量较轻,在置钉操作时挤压和震动可能导致少量的偏移。但参照骨科手术机器人在临床其他适应证中的实际应用情况,整体系统的误差是完全可以接受的,这仍需要临床试验加以验证,而且导航机器人的软硬件包括影像设备仍在根据临床反馈不断更新,其整体精度也在不断调整优化。(2)本研究为探索性研究,样本量较小,未来将开展数据和人工智能驱动的大样本研究。(3)本研究为肩胛骨模型的形态学研究,无法充分代表临床中实际患者解剖结构的多样性,今后将进一步开展对照研究,比较机器人置钉与徒手置钉的生物力学优劣及临床预后差异。
4 结论
本研究通过肩胛骨模型实验,初步验证CBCT引导下机器人辅助反肩关节螺钉置入具有良好的精确度,为今后临床机器人辅助反肩关节置换手术提供了重要的可行性支持。未来将开展数据和人工智能驱动的大样本研究。