基于多传感器信息的新型穿戴式上肢外骨骼康复机器人
2021-06-16刘壮朱纯煜朱越刘苏喻洪流李素姣
刘壮 朱纯煜 朱越 刘苏 喻洪流,3 李素姣,3
0 引言
目前,脑卒中是导致肢体功能障碍的最主要因素之一[1],约80%的脑卒中患者出现上肢偏瘫。偏瘫患者主要表现为自主运动能力丧失,无法实现自我生活照护[2]。医学理论和实践证明,规范、系统的早期康复治疗对脑卒中患者恢复其运动功能起着至关重要的作用[3]。
通过康复训练可以提高患者的肌力及活动度,防止肌肉萎缩,且锻炼还会刺激神经系统,提高其活跃性,促进脑细胞功能的恢复,改善上肢运动功能及认知功能,提高生活质量,为康复治疗提供了全新的治疗方式[4]。传统的康复训练主要由康复医疗师对患者的一对一辅助训练来完成,这种被动式训练方式耗时耗力,训练效果受到治疗师手法和体力等因素的影响,导致部分患者的康复效果不佳,进而影响患者的康复进程。
随着机器人技术的飞速发展,上肢外骨骼康复机器人在康复和动力辅助相关领域呈现了广阔的应用前景。研究显示,利用康复机器人技术对肢体功能障碍患者进行康复训练具有重要意义[5]。目前,国内外许多研究机构及企业已经研发了不同自由度和功能的上肢康复机器人,比如瑞士Hocoma公司研发Armeo Spring外骨骼康复机器人,功能全面、技术成熟,但是设备比较复杂;Fellag等[6]设计的基于滑动控制的上肢外骨骼机器人,是一款拥有5个自由度的用于康复的外骨骼机器人,该外骨骼采用末端固定式,使用者只能坐在椅子上进行康复,导致活动范围受到极大的局限。经分析发现,这些上肢康复机器人具有多个自由度,活动范围较大,但同时也导致设备体积较大,不利于携带。此外,部分外骨骼机器人缺乏实时检测患者恢复状况的功能,在一定程度上影响了患者的治疗效果。
基于目前上肢外骨骼机器人存在的不足,本文研发了穿戴式上肢外骨骼康复机器人。该设备机械结构采用模块化设计,体积小,重量轻,便于携带;控制系统包括肌电、应力、姿态采集等单元,并设计了主动、被动和助动三种训练模式,可实时检测患者肌肉恢复状况,解决训练模式自适应不足的问题。
1 系统机械结构
本文提出的穿戴式上肢外骨骼康复机器人机构包括肘关节和腕关节模块,用于实现肘关节和腕关节的屈曲和伸展运动,其中肘关节具有主动、被动和助动三种训练模式的主动自由度,腕关节为主动自由度无电机驱动。外骨骼的机械结构如图1所示。
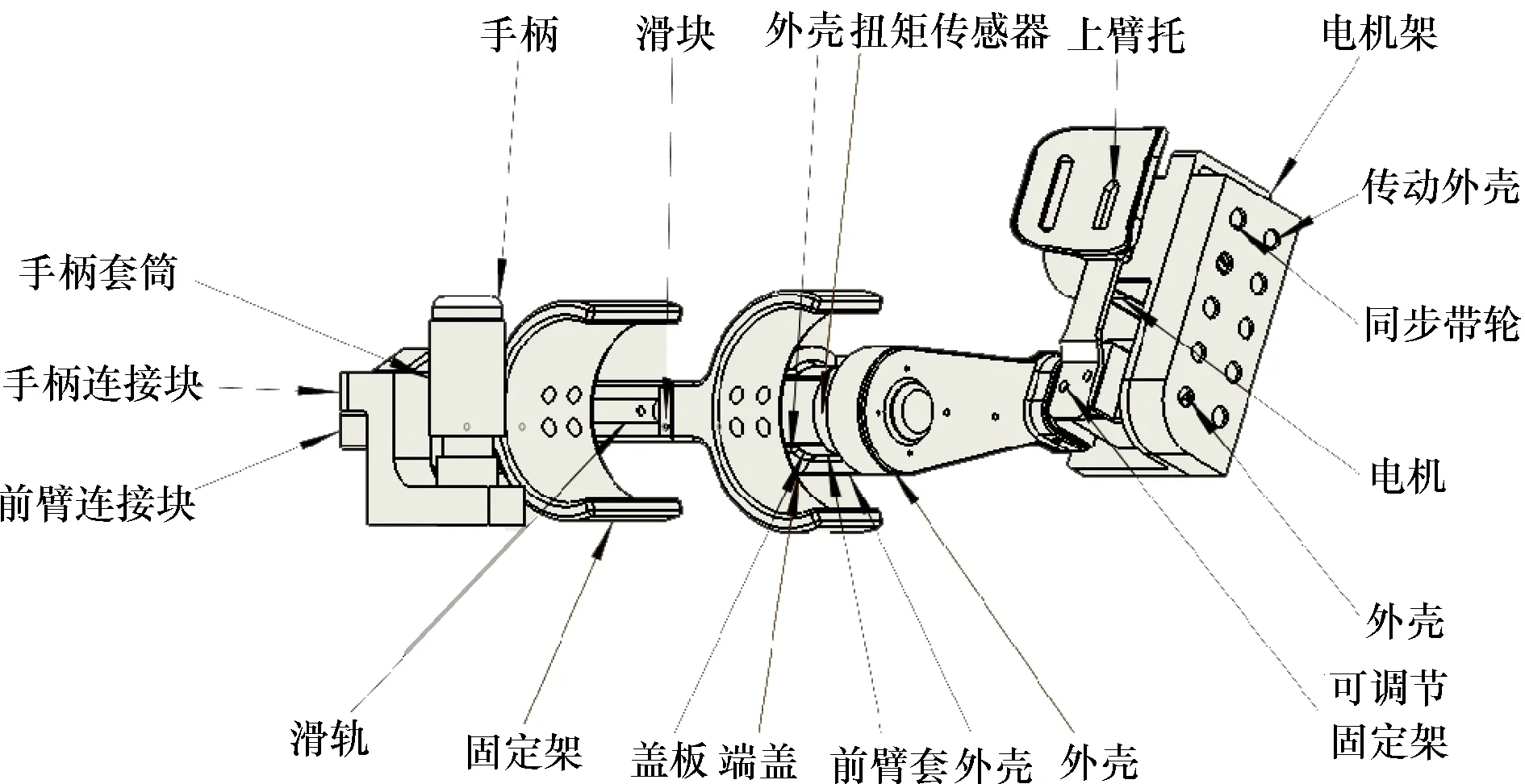
图1 外骨骼整体机械结构
上臂设计的固定臂托和前臂固定架与穿戴者的手臂通过绑带固定,可灵活调节绑带长度以适应穿戴者的臂粗。
前臂设计了滑轨,前臂固定架、套可以在滑轨上滑动,以适应穿戴者的臂长,并保证了穿戴者与外骨骼肘部关节中心的连续重合。
肘关节模块机构由前臂滑轨、前臂套、扭矩传感器、上臂托、电机、电机架以及同步带轮等结构组成。为整个外骨骼系统定制的MAXON直流谐波减速电机(直径43 mm,长71 mm,减速比100)作为动力源,输出12 N·m的力矩,符合设计要求。为了防止外骨骼对人体造成二次伤害,肘关节设计第一重机械限位(0°~140°)。此外,在外骨骼上创新性地安装了姿态传感器(MPU6050模块),实时采集肘关节角度信息,在软件程序中设计第二重限位保护。
腕关节模块的机械结构依据人体仿生学设计了前臂固定架、连接块以及手柄等结构。腕关节模块的主动自由度无电机驱动设计,保证患者在进行肘关节康复训练的同时,腕部也可以得到充分的训练,再配合手柄的抓握设计,完全符合训练需求。
为保证上肢外骨骼的舒适性和轻便性,机械结构的滑轨部分为钢制材料,其余部分如前臂固定架、上臂托、连接块等结构均采用3D打印,以减轻穿戴外骨骼时的负重感。
2 控制系统
上肢外骨骼康复机器人控制系统总体设计框如图2所示,包括主控芯片、数据采集单元、驱动单元、系统电源等部分。
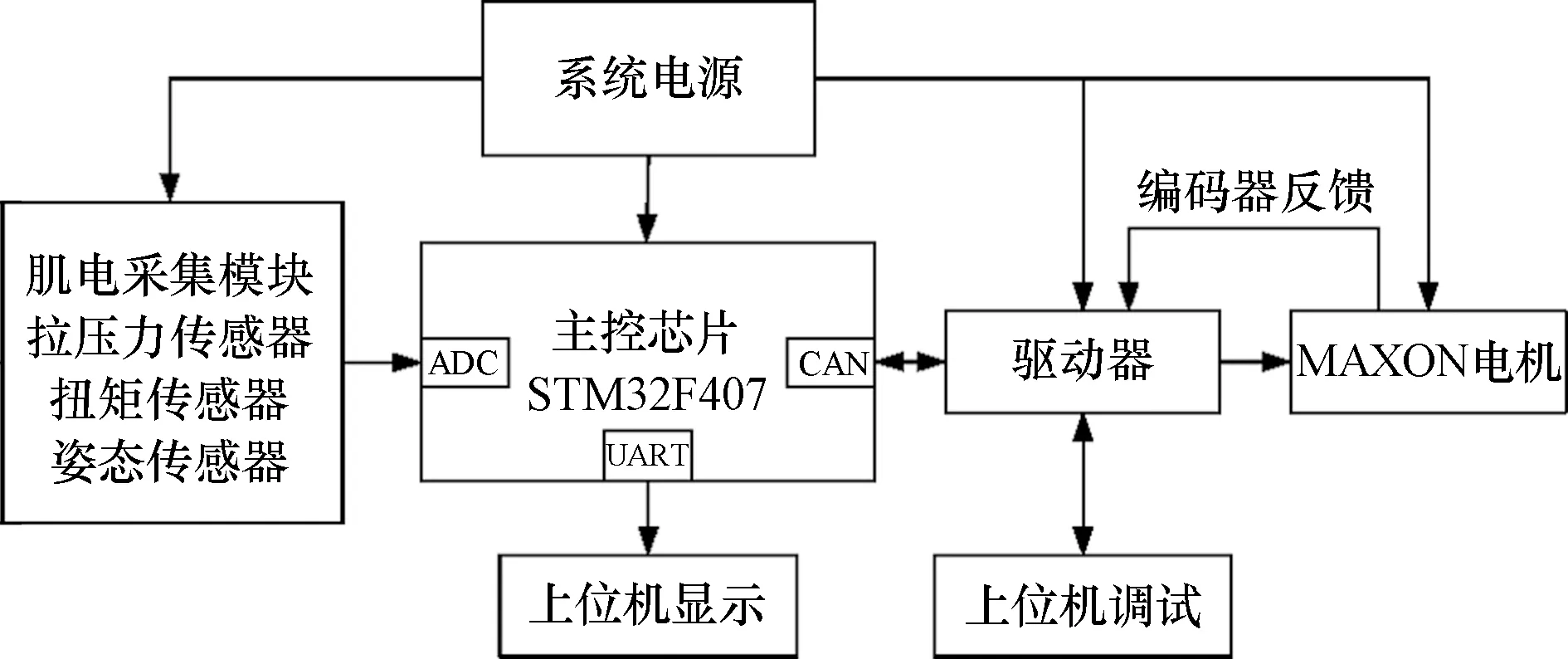
图2 上肢外骨骼康复机器人控制系统
考虑到整个外骨骼系统在使用中需要满足轻便的条件,本文选用STM32芯片组成的嵌入式系统。可供选用的芯片分别是STM32F103、F407、F767芯片。其中F103芯片的ADC通道数最少(21通道)、主频最低(72 MHz);F4和F7芯片的ADC通道数目相同(24通道),F4芯片主频168 MHz;F7芯片主频最高(216 MHz)。综合芯片性能和成本,F407芯片ADC通道数、主频等满足控制系统需求,最终选定F407芯片为嵌入式系统主控芯片。主控芯片主要完成多传感器数据采集、处理,发送控制指令驱动外骨骼运行等功能。
数据采集单元包括肌电电极、拉压力传感器(量程0~20 kg)、扭矩传感器(量程0~20 N·m)、姿态传感器(量程0~180°)。肌电电极、拉压力传感器和扭矩传感器采集的数据,需要通过主控芯片的模数转换器(analog to digital converter,ADC),再进行软件滤波。本文设计了多通道ADC同时采集(多传感器),引入直接存储器访问(direct memory access,DMA)来帮助主控芯片进行数据搬运,以保证系统的实时性,同时提高效率。姿态传感器的数据在解算后通过通信串口将数据传给主控芯片,主控芯片通过串口将所有数据传给上位机(GUI界面)。实验表明,上位机实时显示表面肌电信号值、负载值、肘关节扭矩值以及上肢肘关节运动角度等信息,有助于患者了解自身的情况,吸引患者全身心投入到康复训练中。
驱动单元由MAXON电机以及配套的驱动器等组成。电机安装前需要使用EPOS Studio上位机软件配置调试,调试结束可与主控芯片通信。本文采用CANopen协议来进行主控芯片与驱动器之间的通信,因为CANopen网络各节点之间的数据通信实时性强,并且容易构成冗余结构,提高系统的可靠性和系统的灵活性,并且CAN已经形成国际标准,已被公认为几种最有前途的现场总线之一。
为了提高患者康复训练的效率,本文设计了主动、被动和助动三种训练模式软件程序。软件系统主控程序流程如图3所示。
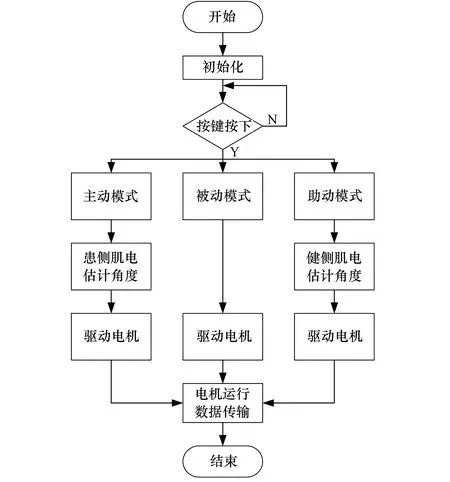
图3 软件系统主控流程
系统开始工作后,进入初始化程序(初始化过程设计了自动归零程序,防止误操作造成不必要的损伤),随后等待患者选择模式,系统在接收到按键键入信息后,进入相应的模式。主动-助动模式下,采集人体的肌电信号,主控芯片对肌电信号进行预处理,再通过神经网络模型预测关节角度,根据预估值给驱动器发送控制指令,驱动外骨骼电机带动患者完成康复训练。被动模式下,按照设定的运行模式完成康复训练,同时采集患者的表面肌电信号并通过上位机显示,医生和患者可实时观测肌电信号。
考虑患者在康复训练中的需求,在软件程序中创新性地设计了挡位调节功能,以随时调整挡位大小(0°~140°)。
3 外骨骼机器人系统性能实验
3.1 受试者信息
实验过程中需采集肌电信号,选择肘部运动屈肌肱二头肌和伸肌肱三头肌这对拮抗肌。本研究招募的5名健康受试者均是高校学生,无肌肉损伤、肌肉骨骼病史,在实验开始之前,确保受试者无剧烈的肘关节运动,避免肌肉疲劳而引发测量数据的偏差。受试者穿戴外骨骼,整体运行性能安全可靠。
3.2 上肢外骨骼助力性能实验
为了探究受试者穿戴外骨骼时肌肉激活程度,验证上肢外骨骼康复机器人给上肢提供助力完成助动训练的可行性,建立表面肌电信号与肌肉激活程度关系模型,得到对应肌肉的神经激活水平即肌肉激活程度[9]:
式中:a(t)为肌肉激活程度,a(t)∈[0,1],肌肉处于最大自主收缩状态时a=1,肌肉未激活时a=0;A为非线性形状因子;U(t)为经过预处理后的表面肌电信号。
受试者做两组对照实验,一组是在无辅助力情况下,克服上肢和外骨骼前臂重力完成屈-伸肘运动;另一组是有辅助力下,完成肘部运动。上肢外骨骼康复机器人助力性能实验场景如图4所示。
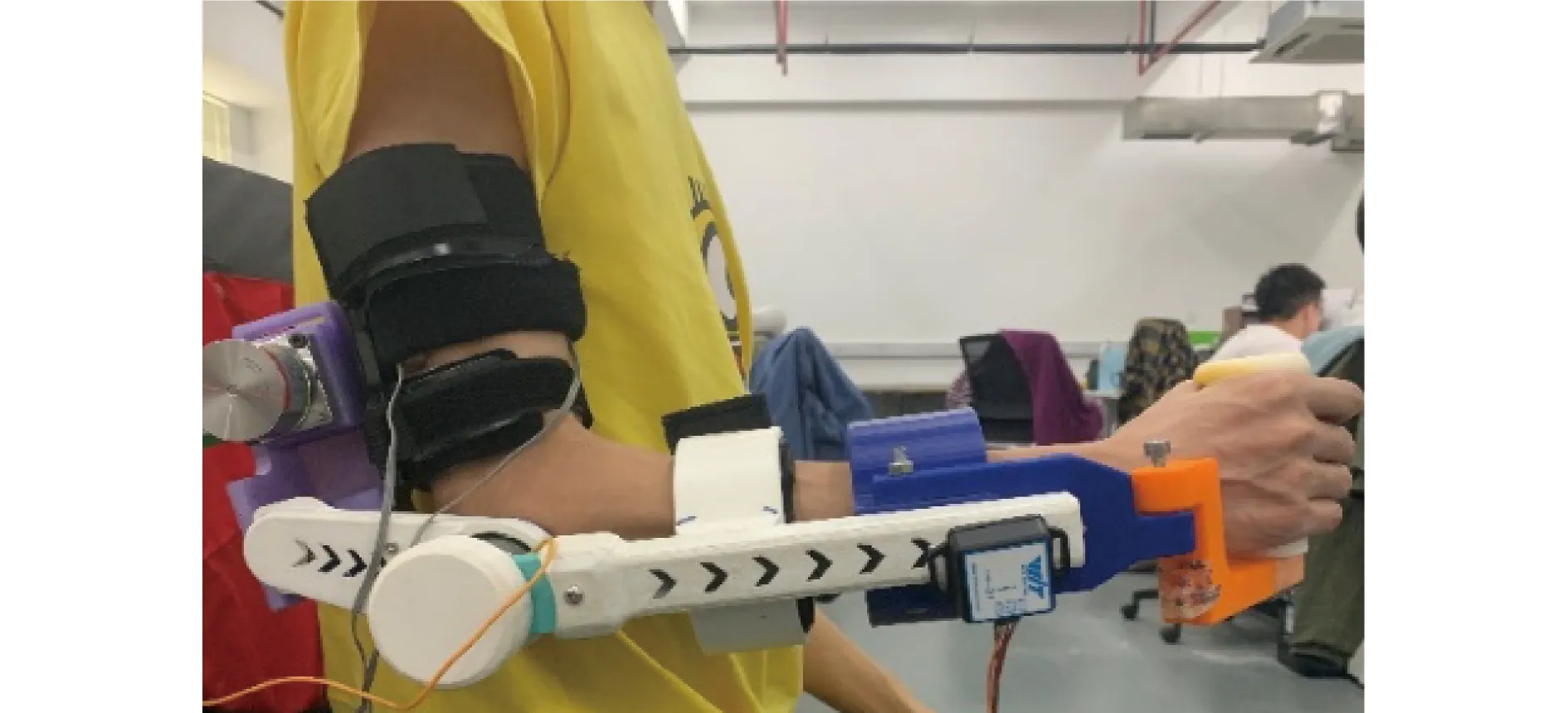
图4 上肢外骨骼康复机器人助力性能实验场景
受试者屈肘实验的肘部运动屈肌肱二头肌激活程度如图5所示,伸肘实验的伸肌肱三头肌激活程度如图6所示。
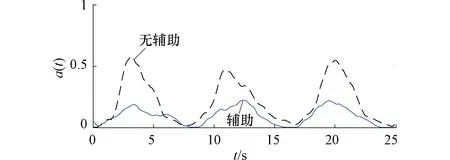
图5 肱二头肌激活程度
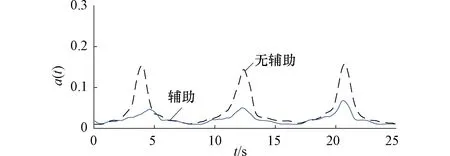
图6 肱三头肌激活程度
由图可知,无辅助力完成运动的情况下,肱二头肌、肱三头肌激活程度分别达到0.53和0.16;有辅助力的情况下,肱二头肌、肱三头肌平均激活程度分别达到0.21和0.05。由此可知,受试者肱二头肌、肱三头肌肌肉激活程度在有-无辅助力时分别减弱约32%、11%,验证了上肢外骨骼康复机器人给上肢提供助力完成助动训练的可行性。
3.3 上肢外骨骼肌电控制性能实验
为了验证肌电信号预测关节运动角度能否满足控制需求,验证外骨骼辅助人体完成主动训练的可行性,受试者左臂分别进行肘关节屈伸动作。实验时,受试者左臂贴肌电电极如图7所示,右臂穿戴上肢外骨骼康复机器人。

图7 左臂肌电电极位置
左臂肌电信号通过肌电电极传输到主控芯片,通过表面肌电信号与肘关节角度的BP神经网络模型来预测关节运动角度,选取最大的关节角度作为真实角度,真实角度作为上肢外骨骼肘关节运动的目标角度[10-12]。在运动过程中,姿态传感器将上肢外骨骼跟随目标角度值的运动角度传到主控芯片,主控芯片通过串口将外骨骼角度发送到上位机显示。对比真实角度和上位机显示的外骨骼角度,5位受试者肌电信号预测关节角度准确率分别93%、95%、96%、94%、97%,平均值为95%。
由此可知,上肢外骨骼活动角度在人体正常范围之内,外骨骼的跟随运动与受试者真实运动意图差异性较小,准确率约95%,验证了外骨骼辅助人体完成主动训练的可行性。
3.4 上肢外骨骼应力测试实验
为了验证拉压力传感器和扭矩传感器实际测量值的准确度,验证外骨骼辅助人体负载重物完成被动训练的可行性,受试者穿戴外骨骼在被动模式下完成如下实验。选用50 g、100 g、200 g标准砝码,进行传感器数据测试。拉压力传感器实验测得数据如表1所示。
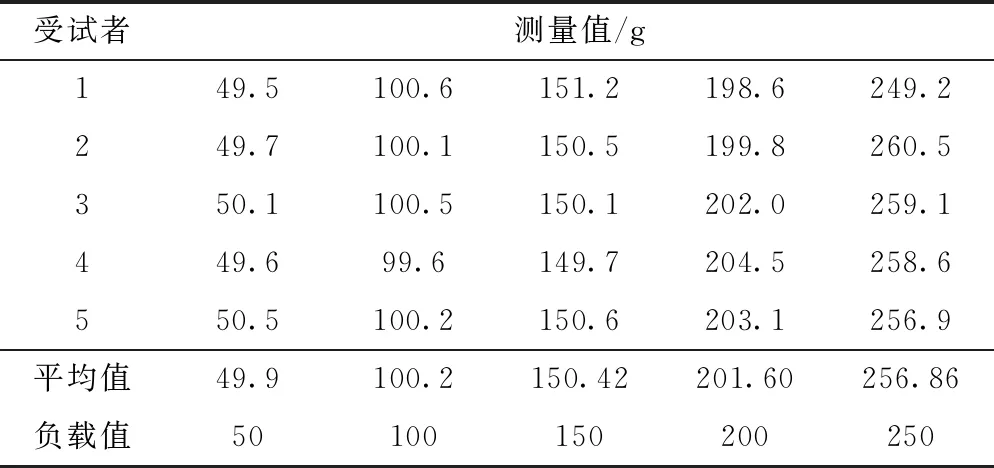
表1 拉压力传感器实验数据
扭矩传感器实验数据如表2所示。
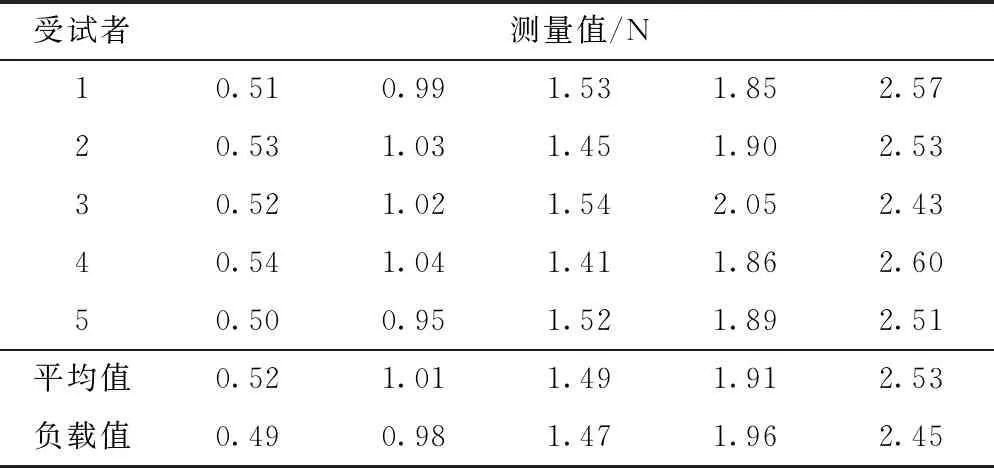
表2 扭矩传感器实验数据
实验中可能因为砝码自身以及实验需要挂钩悬挂砝码等原因导致微量误差,但是实验结果表明,拉压力传感器和扭矩传感器测量值误差均低于5%,验证了外骨骼辅助人体负载重物完成被动训练的可行性。
4 讨论和结论
本文提出一种穿戴式上肢外骨骼康复机器人,机械结构采用模块化设计,体积小,重量轻,便于携带,控制系统包括肌电采集、应力采集、姿态采集等单元,并设计了主动、被动和助动三种训练模式,解决了部分设备无法实时检测患者肌肉恢复状况、训练模式自适应不足等问题。此外,该设备还有其他设备不具有的肌电信号估计肘关节角度功能。
实验表明,上肢外骨骼机器人系统运行安全可靠,受试者穿戴外骨骼在有辅助力情况下的肌肉激活程度平均降低约21%,肌电信号预测关节角度准确度约95%,应力检测值与负载实际值误差低于5%,验证了上肢外骨骼机器人给人体提供助力、提高患者自身的参与度以及辅助人体负载重物的可行性,可以进行辅助患者进行上肢康复训练。
